S5000966
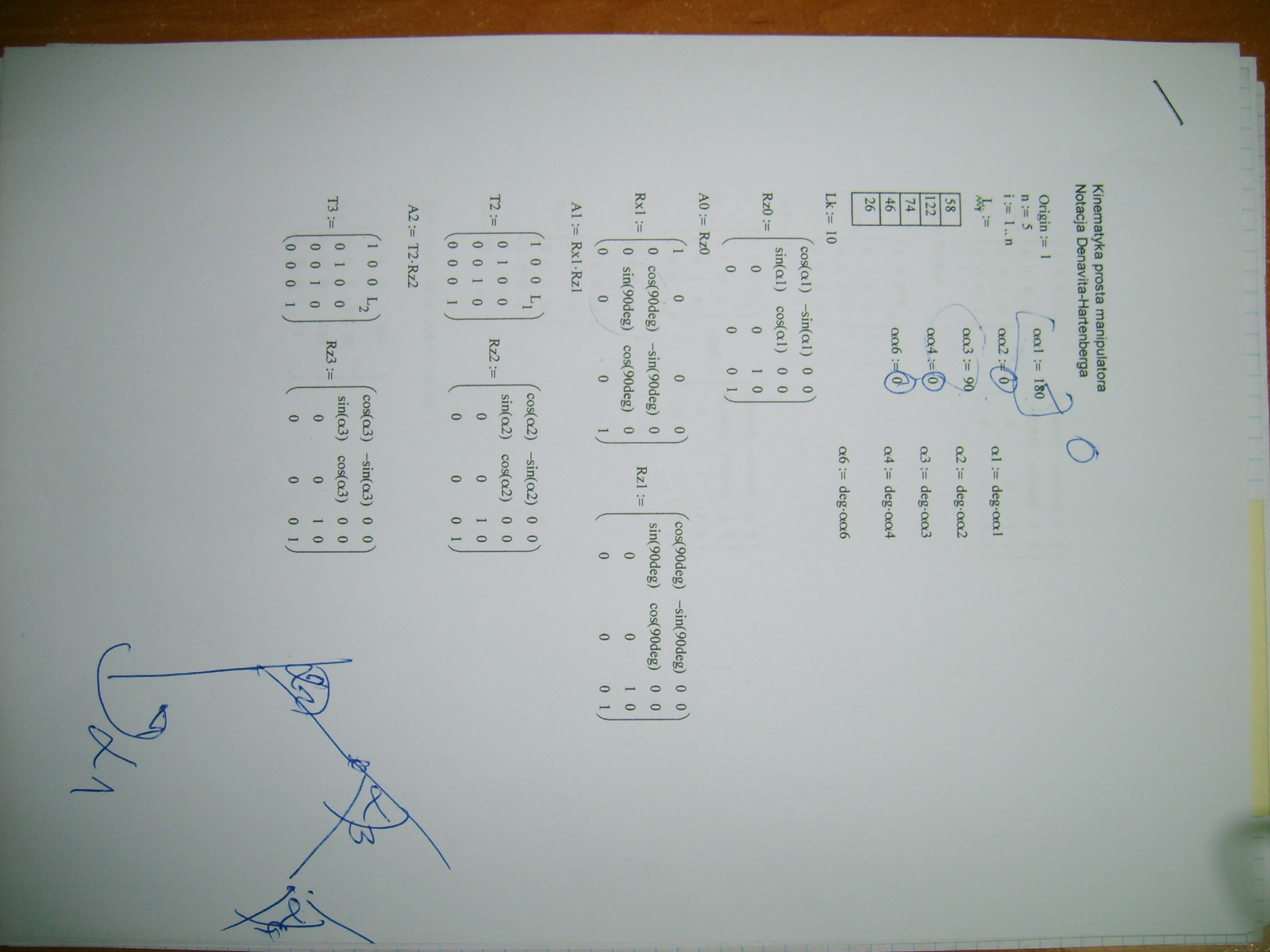
Origin:= 1 n:= 5 i:= l..n
58
122
74
46
Ql
oa
o3
a4
O
= deg-aal = degaa2 = deg-aa3 degac*4
26
Lk.- 10
RzO :=
a6 := deg-ototó
'cos(al) -sin(al) 0 0' sin(al) cos(q1) 0 0 0 0 10 i 0 0 0 1
A0:= RzO
Rxl :=
|
'1 |
0 |
0 |
0' | |
|
0 |
cos(90deg) |
-sin(90deg) |
0 |
Rzl := |
|
0 |
sin(90deg) |
cos(90deg) |
0 | |
|
,0 |
0 |
0 |
1 |
cos(90deg) -sin(90deg) 0 0 sin(90deg) cos(90deg) 0 0
1 0 0 1
Al := Rxl Rzl

T21=
|
'l |
0 |
0 |
^cos(a2) |
-sin(ct2) |
0 0' | ||
|
0 |
1 |
0 |
0 |
Rz2 := |
sin(a2) |
cos(a2) |
0 0 |
|
0 |
0 |
1 |
0 |
0 |
0 |
1 0 | |
|
,0 |
0 |
0 |
1 > |
, o |
0 |
o 1, |
A2 := T2Rz2
|
i 0 0 l2' |
cos(a3) -sin(a3) 0 0' | ||
|
T3:= |
0 10 0 |
Rz3 := |
sin(a3) cos(a3) 0 0 |
|
0 0 10 |
0 0 10 | ||
|
,0 0 0 1 y |
O o o |
Wyszukiwarka
Podobne podstrony:
Rozdział 2Kinematyka manipulatora 2.1 Reprezentacja Denavita-Hartenberga Wyznaczenie kinematyki wedł
2 Kinematyka prosta Celem tej części sprawozdania jest określenie położenia końcówki manipulatora w
Spis tabel 2.1 Parametry Denavita-Hartenberga manipulatora................ 8 3.1
2 Kinematyka prosta Celem tej części sprawozdania jest określenie położenia końcówki manipulatora w
2 Kinematyka prosta Celem tej części sprawozdania jest określenie położenia końcówki manipulatora w
2 Kinematyka prosta Celem tej części sprawozdania jest określenie położenia końcówki manipulatora w
IMGG68 1- Dana jest tabela parametrów Denavita-Hartenberga: (★ - zmienna ruchu) e d a a 1
pytaniarobotykaa Dana jest tabela parametrów Denavita-Hartenberga: (* - zmienna
2.2 Wyprowadzenie kinematyki prostej manipulatora Rozważany manipulator jest manipulatorem klasy 5R1
13 Rys. 2.4. Pizy kładowe struktury kinematyczne stacjonarnych manipulatorów bezchwy takowy c h
ScanImage08 (5) 7777. 7777. Rysunek 8. Schemat kinematyczny realizowanego manipulatora.Analiza
więcej podobnych podstron