skanuj0001 [Rozdzielczość Pulpitu]

98_2. Zastosowanie metody pośredniczącej do opracowania sieci__
cji wyrównanych, gdyż żądane wartości współrzędnych daje rachunek niewiadomych pośredniczących.
W zależności od rodzaju obserwacji rozróżniamy sieci płaskie kątowe, kierunkowe, ozymutalne, liniowe, kąlowo-liniowe, azymutalno-liniowc itd.
Pewne typy płaskich sieci geodezyjnych mają swe ustalone nawy określające kształt elementów geometrycznych, z których są zbudowane oraz rodzaj wykonanych obserwacji.
Sieć triangulacyjna jest zbudowana z trójkątów, których wierzchołkami są jej punkty. Obeserwuje się kąty trójkątów. Jest to więc sieć kątowo. Pomiar długości niewielkiej liczby boków sieci (tzw. baz) nie powoduje zmiany jej nazwy. Dla sieci triangulacyjnych z pomiarami bazowymi pozostawiono tą samą nazwą, chociaż są to sieci kąlowo-liniowe.
Sieć trilhteracyjna jest również zbudowana z trójkątów, których wierzchołkami są jej punkty. Obserwuje sią długości boków trójkątów. Jest to więc sieć liniowa.
Sieć poligonowa jest siecią geodezyjną złożoną z powiązanych z sobą linii łamanych, których wierzchołkami są punkty sieci. Pomiarowi podlegają kąty wierzchołkowe oraz długości boków poligonu (bolcami poligonu nazywa sią poszczególne odcinki linii łamanej). Sieci poligonowe są więc sieciami kątowo-Iiniowymi.
Istnieje możliwość konstruowania sieci złożonych z kilku wymienionych wyżej typów.
§ 2.2. Wyrównanie sieci niwelacyjnych
2.2.1 Wyrównanie sieci niwelacyjnej z obserwacjami jednakowo dokładnymi
PRZYKŁAD 1. Wyrównać daną sieć niwelacyjną (rys. 2.1) przyjmując obserwacje za jednakowo dokładne. Obliczyć błędy średnie wysokości punktów wyznaczanych oraz błąd średni różnicy wysokości A punktów 8112.
19
25
____§ 2.2. Wyrównania giccj niwelacyjnych___99
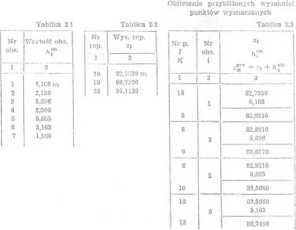
Na rysunku strzałkami zaznaczono kierunki wzniesień. Dane zawierają tablice 2.1 i 2.2.
Rachunek rozpoczynamy od obliczenia przybliżonych wartości niewiadomych pośredniczących, którymi są wysokości punktów wyznaczanych. Wykorzystujemy do logo znane wysokości reperów oraz przewyższenia zaobserwowane. Tak np. przybliżoną wartość wysokości punktu nr 8 otrzymujemy jako sumą wysokości reperu nr 18 i przewyższenia nr 1. Podobnie wysokość przybliżoną punktu nr 9 obliczamy jako sumą otrzymanej uprzednio wysokości punktu nr 8 i obserwacji nr 3. Rachunek zawiera tablica 2.3.
W tablicy nr 2.4 obliczono przybliżone wartości przewyższeń jako róż
nice przybliżonych wysokości punktów K (wyższego) oraz I (niższego) każdego ciągu. Różnice htprz — fi,6b I*, dają wyrazy wolne równań poprawek.
Równania poprawek zapisano w tablicy 2.5, przy czym za punkt K (końcowy) przyjmowano konsekwentnie wyższy z dwóch punktów knż.i- :: • ciągu Wykorzystano Ul wzór nn równanie pcę>r ivld pr-.-. ' . i.:.v-U®*>
Wyszukiwarka
Podobne podstrony:
skanuj0007 [Rozdzielczość Pulpitu] 3 2. Zasfojoauuie metody poireduicręeej do op i I-1l 13,01 1,
skanuj0039 (25) się, więc jedynie w sposób pośredni do wspierania procesów sprzedaży produktów na ry
skanuj0146 (2) Rozdział 8TEORIA PRODUKCJI 8.1. Funkcja czynników produkcji Do prowadzenia działalnoś
skanuj0222 Rozdział 1 Koncepcje zarządzania strategicznego 21
Przykłady zastosowania metody sił do układania równania ruchu 1. Drgania swobodne tłumione wahadła
Paweł Konopka, Ewa Roszkowska — Zastosowanie metody UFA do wspomagania podejmowania decyzji o finans
skanuj0002 [Rozdzielczość Pulpitu] Obliczenie przawyżjzeń przybliżonych i wyrazów wolnych równań pop
skanuj0003 [Rozdzielczość Pulpitu] 2. y.u:.i<r..i,u-I. ■ • i............. 1 •:»
skanuj0005 [Rozdzielczość Pulpitu] 104 W tablicy 2.11 obliczono przybliżone wysokości punktów wyznac
skanuj0006 [Rozdzielczość Pulpitu] jąccj mu obserwacji. Zrównoważone równania poprawek zajmują dolną
skanuj0014(2) 2 i kątowe w zależności od zastosowanej metody zdjęcia szczegółów. Obliczając współrzę
skanuj0301 ROZDZIAŁ DZIEWIĄTY: Shadery i algorytmy renderingu 301 do obsługi procesów potrzebnych do
skanuj0389 ROZDZIAŁ JEDENASTY: Przebiegi renderingu i kompozycja 389 do obiektu. Gdy prawdziwa mapa
ZASTOSOWANIE METODY PCR DO RÓŻNICOWANIA DROŻDŻY PRZEMYSŁOWYCH 71 próżniowej z wirującym rotorem
ZASTOSOWANIE METODY PCR DO RÓŻNICOWANIA DROŻDŻY PRZEMYSŁOWYCH 73 charakterystyczne tylko dla jednego
więcej podobnych podstron