Untitled 34
VJO f r\b \'I *ł i f
kolejności zmiennych stanu: wym =
3
0
2
1
0
1
x0 =
0
1
0
zmst =
/tlok/Integratorl /tłok/Integrator2 /tłok/Integrator
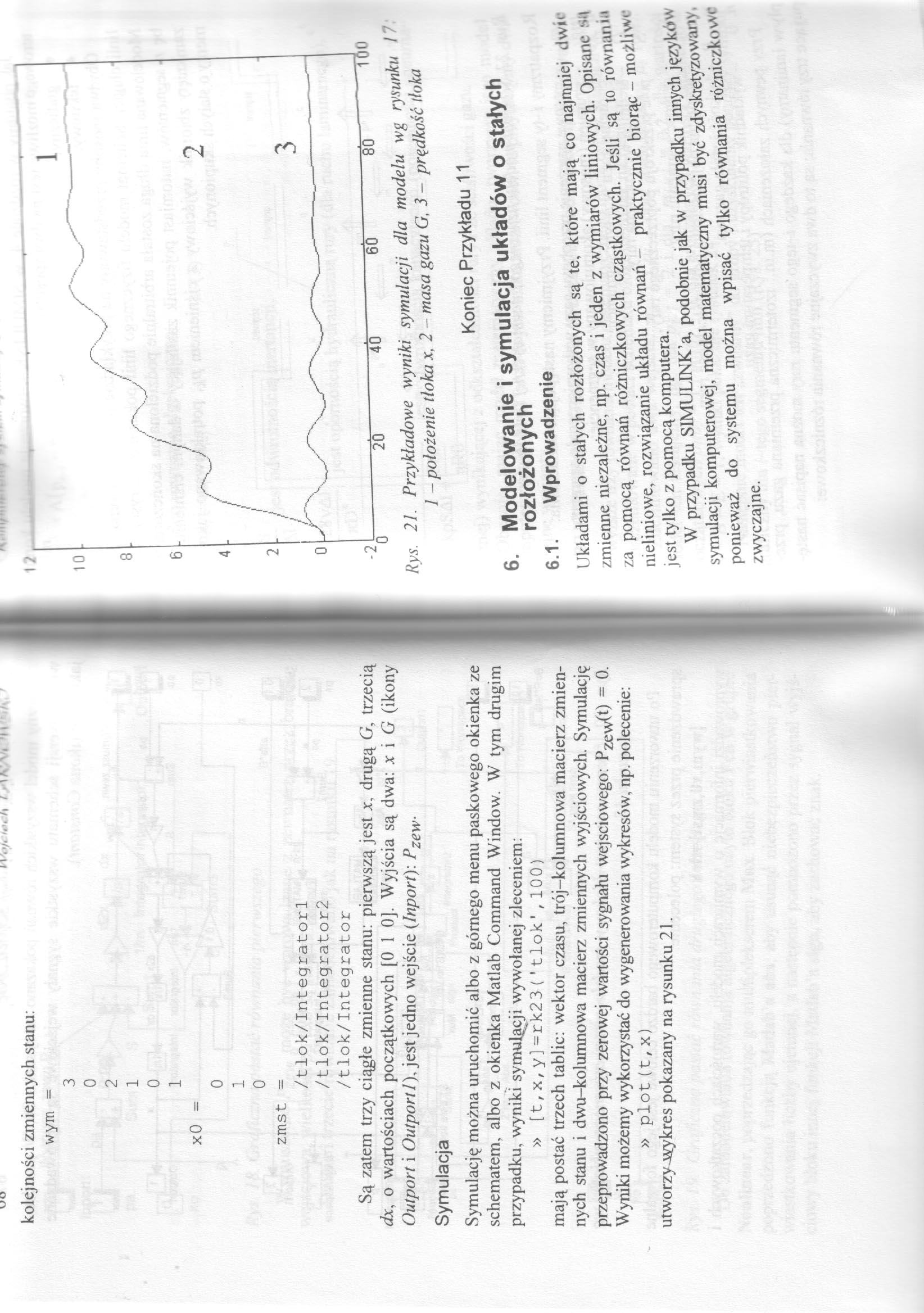
Są zatem trzy ciągłe zmienne stanu: pierwszą jest x, drugą G, trzecią dx, o wartościach początkowych [0 1 OJ. Wyjścia są dwa: x i G (ikony Outport i Outportl), jest jedno wejście (lnport): Pzew.
Symulacja
Symulację można uruchomić albo z górnego menu paskowego okienka ze schematem, albo z okienka Matlab Command Window. W tym drugim przypadku, wyniki symulacji wywołanej zleceniem:
» [t,x,y]=rk23('tłok',100) mają postać trzech tablic: wektor czasu, trój-kolumnowa macierz zmiennych stanu i dwu-kolumnowa macierz zmiennych wyjściowych. Symulację przeprowadzono przy zerowej wartości sygnału wejściowego: PzewO) = 0-Wyniki możemy wykorzystać do wygenerowania wykresów, np. polecenie:
» plot(t,x)
utworzy ^wykres pokazany na rysunku 21.
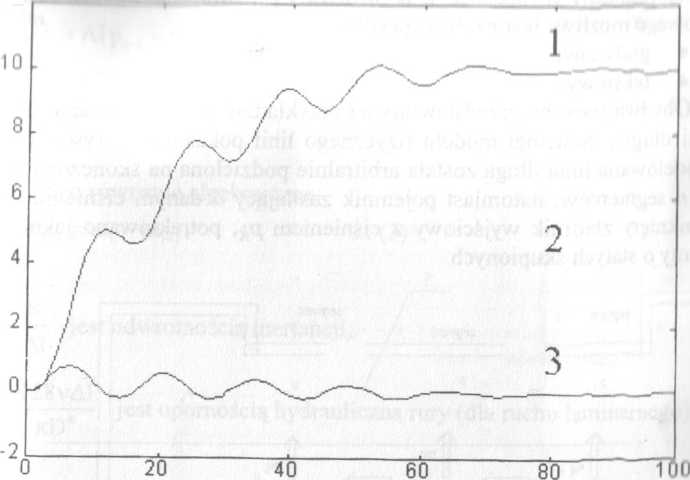
Rvs. 21. Przykładowe wyniki symulacji dla modelu wg rysunku 17: 1 - położenie tłoka x, 2 - masa gazu G, 3 - prędkość tłoka
Koniec Przykładu 11
6. Modelowanie i symulacja układów o stałych rozłożonych 6.1. Wprowadzenie
Układami o stałych rozłożonych są te, które mają co najmniej dwu zmienne niezależne, np. czas i jeden z wymiarów liniowych. Opisane s*i /.a pomocą równań różniczkowych cząstkowych. Jeśli są to równania nieliniowe, rozwiązanie układu równań - praktycznie biorąc - możliwi jest tylko z pomocą komputera.
W przypadku SIMULINK’a, podobnie jak w przypadku innych języków symulacji komputerowej, model matematyczny musi być zdyskretyzowam ponieważ do systemu można wpisać tylko równania różniczkowe
zwyczajne.
Wyszukiwarka
Podobne podstrony:
Image134 Rys. Zmienne stanu — droga X0— prędkość X7— przyspieszenie w wyróżnionych chwilach czasu: 1
Untitled 31 guzie zadeklarowano tylko czas symulacji 10 i wartości poi. .pkowt 11 ’
Image241 B =i nxn nxr zmiany wektora wejść nie wywołują zmian wszystkich zmiennych stanu X(t) macier
Image242 zmiany wektora wejść nie wywołują zmian zmiennych stanu zmiany wektora stanu nie wywołują
str01 (2) STANY NIEUSTALONE W OBWODACH ELEKTRYCZNYCH- metoda zmiennych stanu 14.9. METODA ZMIENNYCH
Zmienne stanu W termodynamice, oprócz energii wewnętrznej, do opisu zmian zachodzących w układach
/• Zad. I Dla układu Rl.C przedstawionego na schemacie określić: -równania stanu (jako zmienne stanu
Untitled 34 r i15 Fruwające rączki jestem ptakiem, fruwam sobie I rączkami skrzydła robię. Frun
Untitled 34 Wybieranie rymującego się słowa, część 3 Powiedz nazwę tego, co przedstawia obrazek w pi
Jak powstają równania Reynoldsa.. Stopień złożoności zmiennych stanu (min. Prędkości u) w ruchu
66573 Untitled 2 (34) Rys. 2. Schemat narzędzi do cięcia: a) równoległych nożach, b) gilotynowa, c)
Str (1) 300 - Literatura. lj; 1. Pełczewskl W., Krynice M.j Metoda zmiennych stanu
40933 skanuj0007 (172) 2.2. Założenia i zmienne stanu wejściowego > materiał sy
41563 PC043355 Rozdział Funkcje jednej zmiennej Rozdział Funkcje jednej zmiennej fjxo + hy - /(x0) h
więcej podobnych podstron