27 (46)
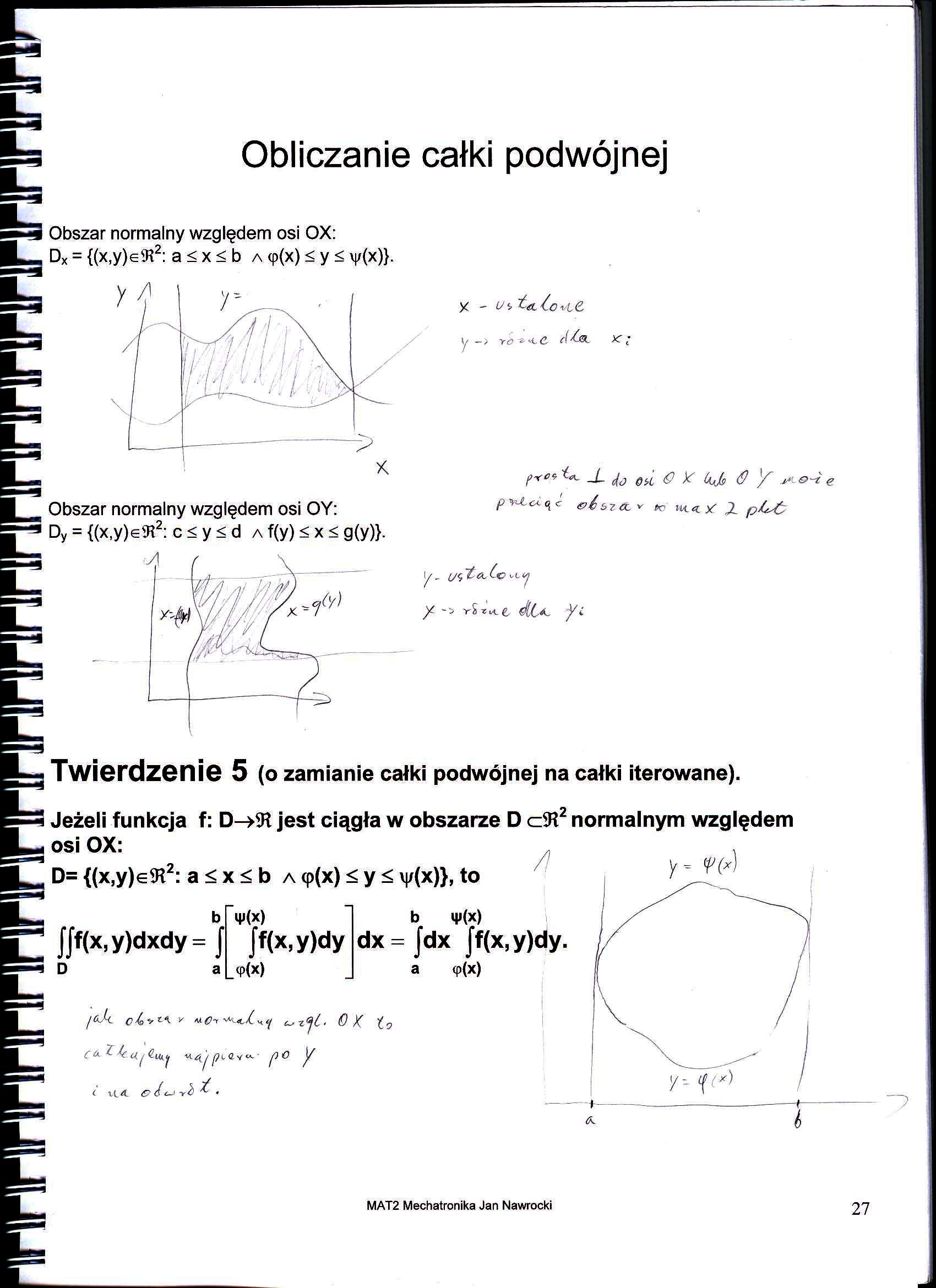
X - uI-o.
y yo ’■<. O cl )C
p-yc* t.<A_ ± @ y yy Y ja.
p^tc^ąc &lbrĆLv *, urn* X

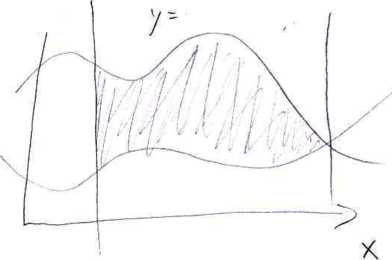
B Obszar normalny względem osi OY:
Dy = {(x,y)e!R2: c < y < d a f(y) < x < g(y)}.
W, l/ęZcL^c ty
X -> -rSr^e y<
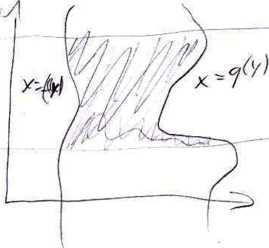
Twierdzenie 5 (o zamianie całki podwójnej na całki iterowane).
Jeżeli funkcja f: D-»9t jest ciągła w obszarze D c$R2 normalnym względem osi OX:
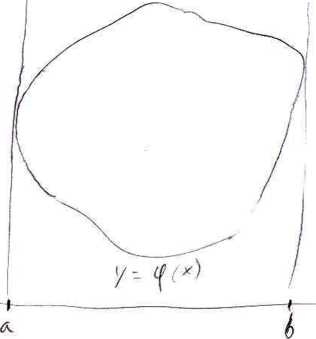
D= {(x,y)e$R2: a < x < b a cp(x) < y < \|/(x)}, to ^
ip(x)
|f(x,y)dy
9(x)
b ip(x)
dx = Jdx Jf(x,y)dy.
a cp(x)
b
jjf(x,y)dxdy = J
/<d<- / M-C-(9 Y
C & Ł a j ćmy oLĄ/p^ay^- po j/
< U A. C ^ *
MAT2 Mechatronika Jan Nawrocki 27
Wyszukiwarka
Podobne podstrony:
8(1) Twierdzenie Grccna Jeżeli funkcje P(x, y) i Q{xt y) są klasy Cl w obszarze normalnym D (względe
Scan10038 2. Obszar D a R~ nazywamy obszarem normalnym względem osi OY. jeżeli jest określony
Obszar całkowania dzielimy na trzy obszary normalne względem osi Oy Mamy zatem i 2 / (x, y) dx + J d
2 (847) Obszar D jest normalny względem osi Qx , zatem-a<x<a D = Ux,y) 2 ■2 > ■bJl—jśyśb Jl
28 (44) -IUwaga 5. Jeżeli funkcja f: D-»$R jest ciągła w obszarze D c9t2 normalnym względem osi OY:&
matma egz002 b) Moment bezwładności jednorodnej (o gęstości pm = 2) bryły V względem osi OX jest gra
Funkcje rozkładu normalnego ■ Wartość parametru m decyduje o położeniu krzywej normalnej względem os
Scan10052 TWIERDZENIE Momenty bezwładności B*, By, B0 względem osi OX I OY oraz początku układu wspó
2011 07 27 ;46;59 l ! SUPER DOWCIPY 5/96 * DO ZAPISYWANIA WSPOMNIEŃ ^ 37 OBŁUDA, NIE PRAWDA ł /
46 (69) Moment statyczny względem osi OY materialnego płata S o gęstości rozkładu masy p: My =
398 XX. Zastosowania geometryczne całek Rozwiązanie. Moment bezwładności łuku krzywej względem osi O
P5140231 Zgodnie z wzorami na momenty bezwładności względem osi Ox ,0 ,0Z możemy zapisać: Korzystają
więcej podobnych podstron