Bez tytułu
Editor - C:\Users\MATEUSZ\Desktop\mateusz AugustyrAdanemanipulatora.m
Insert P /*

Find Files Insert ^ }x ^ ^ <£>
Compare ▼ Comment ^ _£$ UJ c£>j) Go To ▼
Indent |j] ||«^ ^ Find ▼
Print ▼
0 ~Zr
o ■=:
Breakpoints Run
Run and Run and Time Advance
|>| Run Section Advance
FILE
EDIT
NAYIGATE BREAKPOINTS
RUN
[ danemanipulatora.m *| matrixA.m x
matrixdA.m x
matrixdQ.m x matrixeps.m x matrixomega.m x matrixQ.m x matrixQk.m x pozycja_orientacja.m x Prędkości.m x Projektl.m x Przyspieszenia.m >►
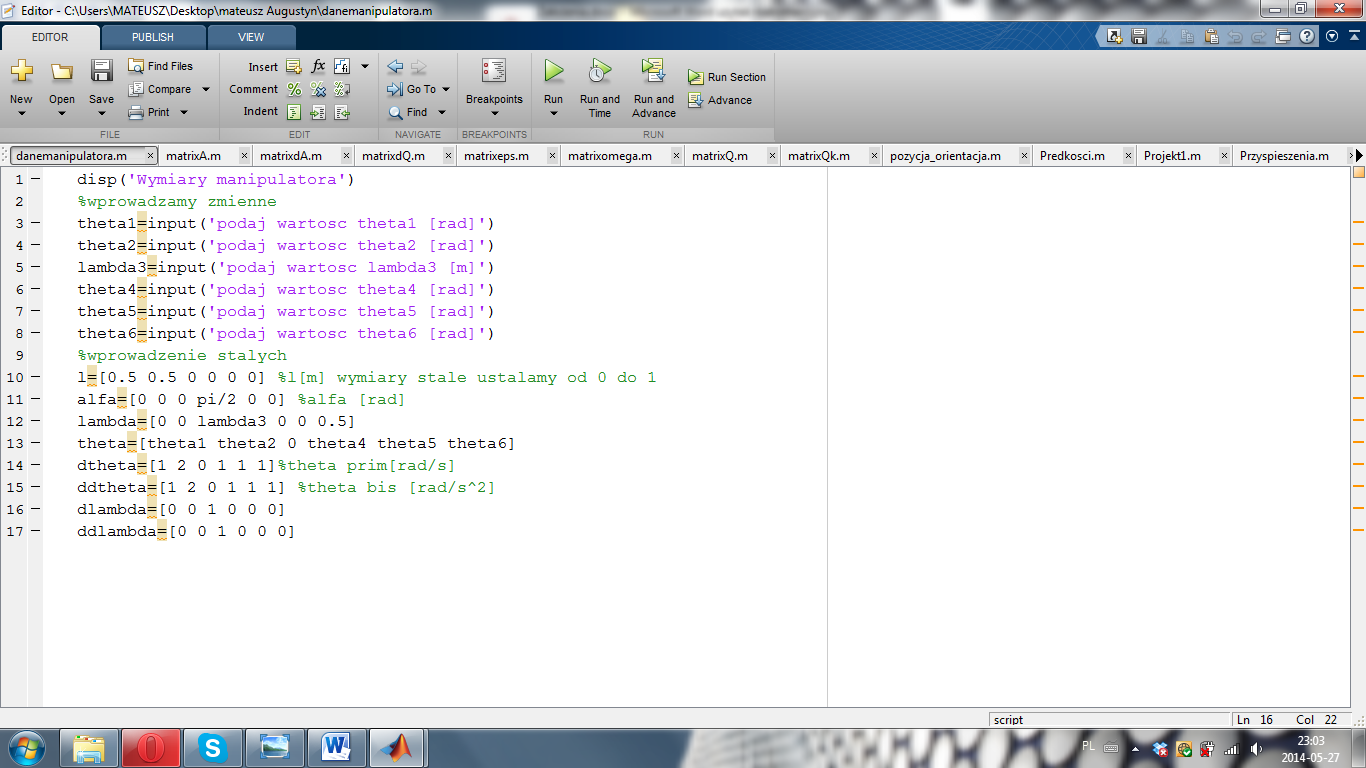
disp('Wymiary manipulatora')
%wprowacłzamy zmienne
thetal=input('podaj wartość thetal [rad] theta2=input('podaj wartość theta2 [rad] lambda3=input('podaj wartość lambda3 [m] theta4=input('podaj wartość theta4 [rad] theta5=input('podaj wartość theta5 [rad] theta6=input('podaj wartość theta6 [rad]
%wprowadzenie stałych
1=[0.5 0.5 0 0 0 0] %1[m] wymiary stale ustalamy od 0 do 1 alfa=[0 0 0 pi/2 0 0] %alfa [rad] lambda==[0 0 lambda3 0 0 0.5]
theta=[thetal theta2 0 theta4 theta5 theta6] dtheta==[l 2 0 11 l]%theta prim[rad/s] ddtheta=[l 20111] %theta bis [rad/s^2] dlambda=[0 01000] ddlambda=[0 01000]
□
)
)
)
)
)
)
Wyszukiwarka
Podobne podstrony:
pozycja orientacja EDfTOR Editor - C:UsersMATEUSZDesktopmateusz Augustyndanemanipulatora.mfi □ y EDr
projekt1 cześć 2 Editor - C:UsersMATEUSZDesktopmateusz Augustyndanemanipulatora.m EDfTOR EDfTOR - te
prędkosc Editor - C:UsersMATEUSZDesktopmateusz Augustyndanemanipulatora.m EDfTOR FILE Print
v a katowe EDfTOR Editor - C:UsersMATEUSZDesktopmateusz Augustynv_a_katowe.m PUBLISH VIEW Find
matrixQ Editor - C:UsersMATEUSZDesktopmateusz Augustyndanemanipulatora.m EDfTOR Print ▼ Indent
projekt1 cześć 1 Editor - C:UsersMATEUSZDeslctopmateusz Augustyndanemanipulatora.m EDfTOR 1 -2 - 3
przemieszczenia EDfTOR£ □ E Editor - C:UsersMATEUSZDeslctopmateusz Augustyndanemanipulatora.m i>
v a katowe cześc 2 Editor- C:UsersMATEUSZDesktopmateuszAugustynv_a_katowe.m EDrTOR* O New Open Save
EDfTOR* D y Editor - C:UsersAdiDocumentsMATLABkalkulator.m Insert gL J* Q Comment
SKŁADY GRUP Zespół Szkół Technicznych w Jastrowiu 1. Mateusz Augustyniak 2.
Future Simple, Continuous,? going to Unit 3GRAMMAR REFERENCECzas Futurę Simple_ Czasu Futurę Simple
pictures 2 Finał Fantasy XEI-2 Complete Save Editor Save File: D:DesktopFF13-2Gameff13-OO.datNoel
więcej podobnych podstron