pozycja orientacja
EDfTOR
Editor - C:\Users\MATEUSZ\Desktop\mateusz Augustyn\danemanipulatora.m

New
lig Compare ▼ Comment $3 '/$ Go To ▼
Editor - C:\Users\MATEUSZ\Deslctop\mateusz Augustyn\pozycja_orientacja.m

Find Files Insert j|^ fx £fij ^
Compare ▼ Comment ^ |j£l c^>jjGoTo ▼ Indent ^ Find ▼
Print ▼
Breakpoints Run
Run and Run and Time Advance
|>| Run Section Advance
Run Section

Save
FILE
EDIT
NAYIGATE BREAKPOINTS
RUN
|
[ pozycja_orientacja.m x |
Prędkości.m |
X |
Projektl.m |
X |
Przyspieszenia.m |
X |
v_a_katowe.m |
X |
□
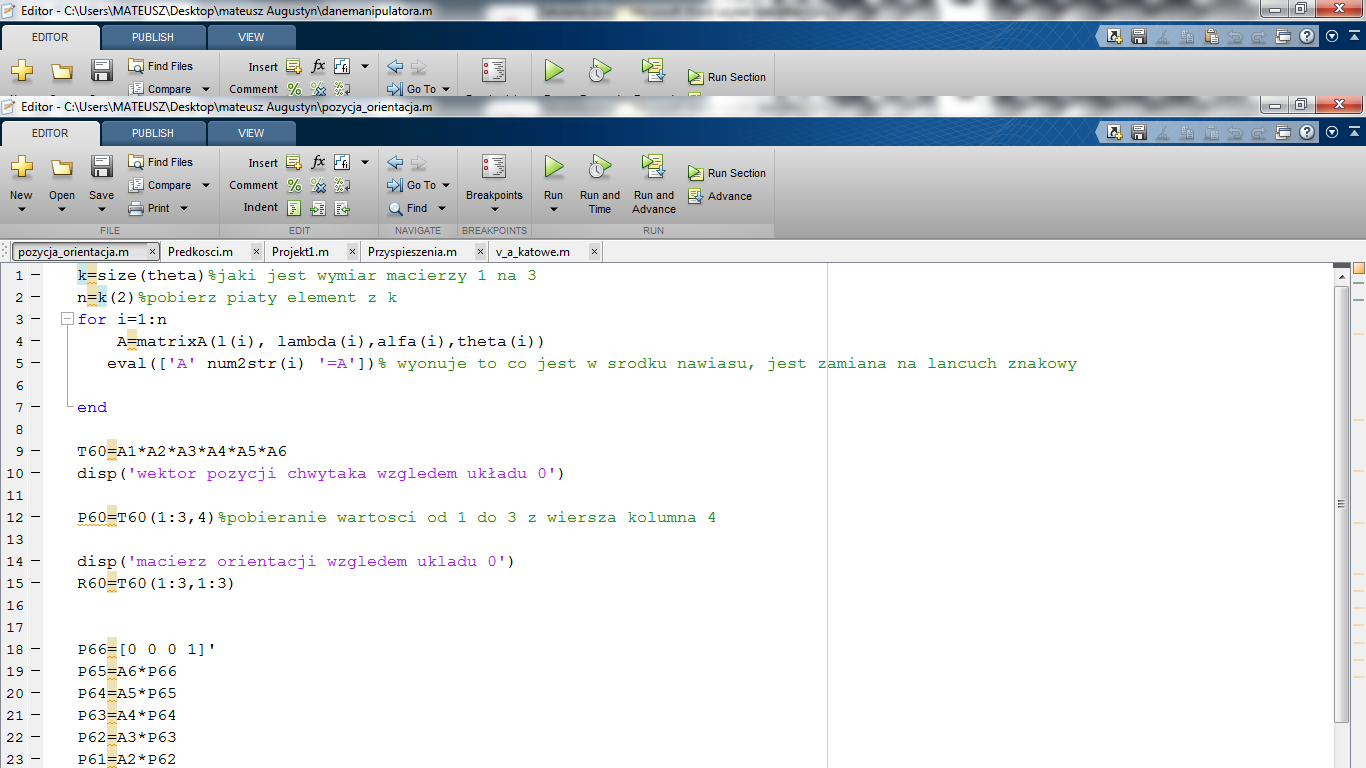
k=size(theta)%jaki jest wymiar macierzy 1 na 3 n=k(2)%pobierz piaty element z k 0 for i=l:n
A=matrixA(1(i), lambda(i),alfa(i),theta(i))
eval(['A' num2str(i) '=A'])% wyonuje to co jest w środku nawiasu, jest zamiana na łańcuch znakowy
end
T60=Al*A2 *A3*A4 *A5*A6
disp('wektor pozycji chwytaka względem układu 0')
P60=T60(1:3,4)%pobieranie wartości od 1 do 3 z wiersza kolumna 4
14— disp('macierz orientacji względem układu 0')
15 - R60=T60(1:3, 1:3)
16
17
18 - P66== [0 0 0 1]'
19 - P65=A6*P66
20 - P64=A5*P65
21 - P63=A4 *P64
22 - P62=A3*P63
23 - P61=A2*P62
Wyszukiwarka
Podobne podstrony:
v a katowe EDfTOR Editor - C:UsersMATEUSZDesktopmateusz Augustynv_a_katowe.m PUBLISH VIEW Find
projekt1 cześć 2 Editor - C:UsersMATEUSZDesktopmateusz Augustyndanemanipulatora.m EDfTOR EDfTOR - te
prędkosc Editor - C:UsersMATEUSZDesktopmateusz Augustyndanemanipulatora.m EDfTOR FILE Print
matrixQ Editor - C:UsersMATEUSZDesktopmateusz Augustyndanemanipulatora.m EDfTOR Print ▼ Indent
projekt1 cześć 1 Editor - C:UsersMATEUSZDeslctopmateusz Augustyndanemanipulatora.m EDfTOR 1 -2 - 3
przemieszczenia EDfTOR£ □ E Editor - C:UsersMATEUSZDeslctopmateusz Augustyndanemanipulatora.m i>
v a katowe cześc 2 Editor- C:UsersMATEUSZDesktopmateuszAugustynv_a_katowe.m EDrTOR* O New Open Save
Bez tytułu Editor - C:UsersMATEUSZDesktopmateusz AugustyrAdanemanipulatora.m Insert P /* EDrTOR* O N
EDfTOR* D y Editor - C:UsersAdiDocumentsMATLABkalkulator.m Insert gL J* Q Comment
GEditor - C:UsersOlaDesktopinzynierkaLjeden.m r EDfTOR PUBLISH VIEW ^ Ci 0Find
pictures 2 Finał Fantasy XEI-2 Complete Save Editor Save File: D:DesktopFF13-2Gameff13-OO.datNoel
pictures 3 Finał Fantasy XEI-2 Complete Save Editor Save File: D:DesktopFF13-2Gameff13-OO.dat Gil
więcej podobnych podstron