skanuj0016 (27)
Metoda analizy 'regresyjnej. '
■ -. • ■
. . • Rozwiązując powyższy układ, zwany układem równań normalnych, otrzymuje
się szukane wartości b0, blt..., bK współczynników funkcji regresji o postaci (5.99). W przyjętym modelu matematycznym (5.99) obiektu sterowania założono częściową znajomość charakterystyki obiektu polegającą na znajomości postaci funkcji cpk(u), k = 0,1,..., K. Założenie to tylko pozornie zmniejsza ogólność rozważań. W praktyce przyjmuje się bowiem funkcje <pk(n) o postaciach:
(5.109)
; A- = bp+.buUk + y] bkki£-h 2 b‘Jl‘iuj
u-1
KJ
(5.110)
|
Wn1 • | ||
|
• (p(lł) = uk |
?r / II ►—* JO. |
..,5 ? |
|
<p(jl) = w* |
k * 1.2,. |
..,,5 |
|
.>(«) = U,Uj |
7= 1,2, . |
.., S, lecz i < j |
■"". 'A więc należy wyznaczyć na przykład charakterystykę obiektu (rys. 5.1) w postaci zależności;
Wprowadzimy obecnie dla obiektu nieliniowego formę zredukowaną funkcji . regresji, analogiczną do formy zredukowanej (5.84) w przypadku obiektu liniowego, w postaci ' . . , ’ ' •
(5.111)
xn—x = bu [<p3.(u„)-9?a («)] + ... («)-<?*(«)]
którą otrzymujemy w następujący sposób. Z pierwszego równania układu równań normalnych (5.106), po uwzględnieniu (5.101) otrzymujemy
(5.112)
X~ b0+b1(p1(it)+b2(p2(ii)+ ... +bK(pK(u) przy czym: . . :
•• V N - ■
(5.113)
t * V .* ' 1 , 'l :■ . .
N
1
. <pk(") = y
k= 1,2,..., K
(5.114)
-;Odejmując równanie (5.112) od równania (5.99) otrzymujemy formę zredukowaną (5.111). ^ , :::b '
’ Zadanie identyfikacji charakterystyki statycznej nieliniowego obiektu wielowymiarowego można również prosto przedstawić w zapisie macierzowym.
Poprzednio w celu ujednolicenia zapisu macierzowego funkcji regresji wpfo-wadziliśmy do macierzy sygnałów wejściowych (5.85) zmienną fikcyjną -- ■
; ,. ':i un0 = 1 . H = 1,2, ...,N ’ (5.115)
, .‘Obecnie, podobnie, wprowadzimy funkcję ■ ••
: f dpoOO n = 1,2, ...,N ■ (5.116)
do macierzy danych wejściowych
>o("i)> •••> <Pk(j*0"
(5.117)
<Po(«2), 9>i(k2)».9»2(«2), •••> 9x(»2)
_<Po(%)> 9>i(«*)» 9>2(«jv)» •••> 9fc(%)..
Funkcja regresji (5.99), przyjmie postać zgodnie ze wzorem (5.89) x—Ub • ~ (5.118)
przy czym
*r = (*„,*i.....&*) ' • . . ; . . (5.119)
Kryterium minimalizacji (5.104) zachowa postać wzoru (5.90). Ostateczni rozwiązanie będzie mieć postać analogiczną do wzoru. (5.93)
-..b^ {UTU)-'UTx ' y- ; "•! a -: ‘-Z (5.120)
z tym jednak zastrzeżeniem, że U jest określone wzorem- (5.117), a nie wzorem (5.85)., Zgodnie z uwagami, umieszczonymi po wzorze (5.93), macierz UTU nic może być osobliwa, a więc kolumny macierzy U danych wejściowych (5.117) muszą być liniowo niezależne i liczba wierszy liniowo niezależnych powinna być nie mniejsza niż liczba K+l nieznanych współczynników bk.
5.7. Ocena zgodności funkcji regresji z danymi doświadczalnymi
W poprzednich rozważaniach omówiono szczegółowo problem wyznaczania funkcji regresji. Znajomość funkcji regresji, charakteryzującej związek funkcyjny tkwiący w zależności statystycznej, umożliwia przewidywanie przeciętnego zachowania się obiektu. Dla dowolnego zestawu wartości wielkości wejściowych Ux> U2, ..., Us można obliczyć estymator wartości oczekiwanej wielkości wyjściowej X obiektu, będącej zmienną losową.
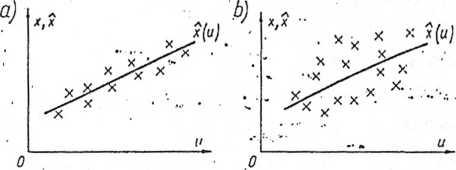
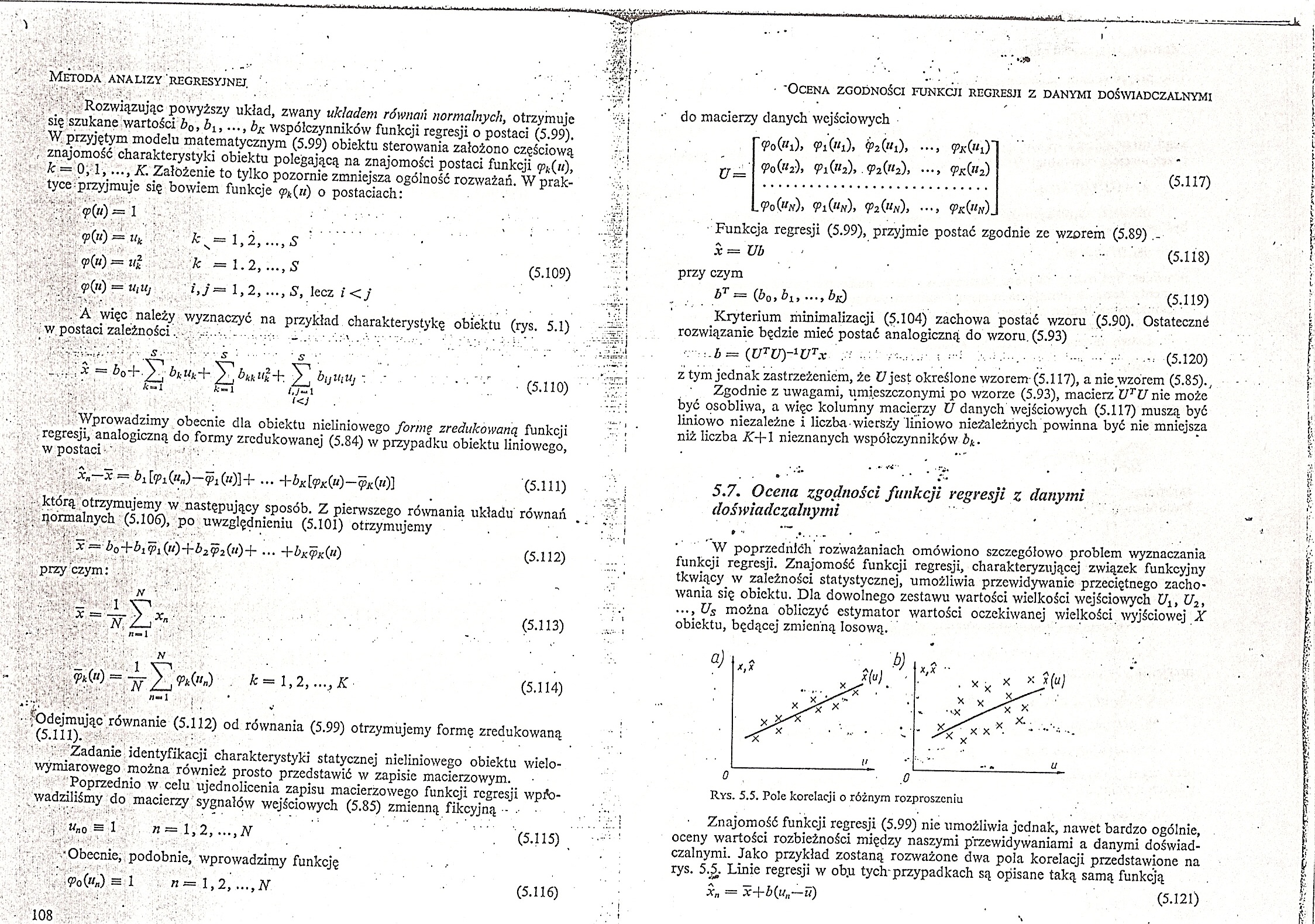
Rys. 5.5. Pole korelacji o różnym rozproszeniu
Znajomość funkcji regresji (5.99) nie umożliwia jednak, nawet bardzo ogólnie, oceny wartości rozbieżności między naszymi przewidywaniami a danymi doświadczalnymi. Jako przykład zostaną rozważone dwa pola korelacji przedstawione na rys. 5.5. Linie regresji w obu tych'przypadkach są opisane taką samą funkcją
xn = x+b(u„—u) (5.121)
Wyszukiwarka
Podobne podstrony:
skanuj0008 (44) <j<0 Metoda analizy regresyjnej Charakterystyka ta aprotćsymuje rzeczywistą ch
skanuj0009 (44) Metoda analizy regresyjnej T:*V.V W naszym przypadku, podstawiając (5.10) do (5.11),
skanuj0018 (24) Metoda analizy regresyjnej ....M
skanuj0017 (25) Metoda analizy regresyjnej Na rys. 5.5a punkty obserwowane leżą blisko linii regresj
skanuj0017 (25) Metoda analizy kegresyjnej Na rys. 5.5a punkty obserwowane leżą blisko linii regresj
skanuj0002(1) 11. Przeprowadzono analizę regresji dla zależności między stażem pra
skanuj0094 (27) 168 B. Cieślar Rozwiązanie Wykresy sił wewnętrznych pokazano na rys. 4.17.2. Oblicza
skanuj0015 3 v* =vo + gt ’0t+2 H = vJ + {gt2 Vl — v0 __ V" — V" Rozwiązując ten układ otrz
skanuj0109 Tensometria oporowa 115 Rozwiązując ten układ równań i wyprowadzając wzór na tg2<Xg, u
279 Analiza trendów i rozwiązań w zakresie dezodoryzacji gazów metodą biofiltracji Z przeprowadzonej
więcej podobnych podstron