str038 (5)
38 1. ELEMENTY TEORII FUNKCJI ZMIENNEJ ZESPOLONEJ


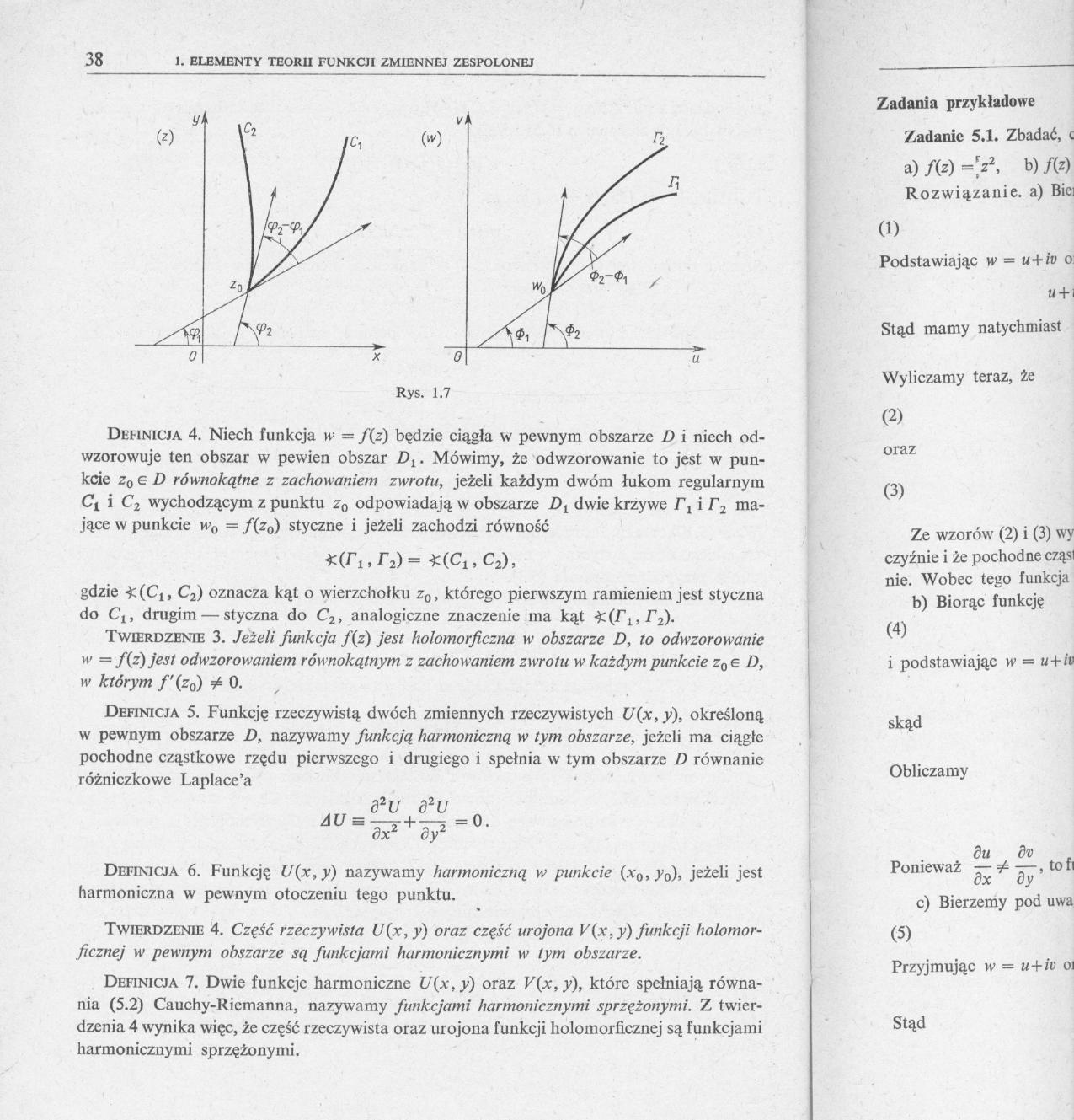
Definicja 4. Niech funkcja w = /(z) będzie ciągła w pewnym obszarze D i niech odwzorowuje ten obszar w pewien obszar Dj. Mówimy, że odwzorowanie to jest w punkcie z0e D równokątne z zachowaniem zwrotu, jeżeli każdym dwóm lukom regularnym Ct i C2 wychodzącym z punktu z0 odpowiadają w obszarze Dt dwie krzywe F, i r2 mające w punkcie w0 = /(z0) styczne i jeżeli zachodzi równość
gdzie C2) oznacza kąt o wierzchołku z0, którego pierwszym ramieniem jest styczna
do C,, drugim — styczna do C2, analogiczne znaczenie ma kąt ■^(r1,r2).
Twierdzenie 3. Jeżeli funkcja /(z) jest holomorficzna w obszarze D, to odwzorowanie w = /(z) jest odwzorowaniem równokątnym z zachowaniem zwrotu w każdym punkcie z0 e D, w którym f'(z0) # 0.
Definicja 5. Funkcję rzeczywistą dwóch zmiennych rzeczywistych U(x,y), określoną w pewnym obszarze D, nazywamy funkcją harmoniczną w tym obszarze, jeżeli ma ciągłe pochodne cząstkowe rzędu pierwszego i drugiego i spełnia w tym obszarze D równanie różniczkowe Laplace’a
d2U d2U AU = ~dx2+dy2
Definicja 6. Funkcję U(x, y) nazywamy harmoniczną w punkcie (x0, _f0), jeżeli jest harmoniczna w pewnym otoczeniu tego punktu.
Twierdzenie 4. Część rzeczywista U(x, j>) oraz część urojona V(x, y) funkcji holomorficznej w pewnym obszarze są funkcjami harmonicznymi w tym obszarze.
Definicja 7. Dwie funkcje harmoniczne U(x,y) oraz V(x,y), które spełniają równania (5.2) Cauchy-Riemanna, nazywamy funkcjami harmonicznymi sprzężonymi. Z twierdzenia 4 wynika więc, że część rzeczywista oraz urojona funkcji holomorficznej są funkcjami harmonicznymi sprzężonymi.
Wyszukiwarka
Podobne podstrony:
66879 str088 (5) 88 1. ELEMENTY TEORII FUNKCJI ZMIENNEJ ZESPOLONEJ Definicja 3. Mówimy, że odwzorowa
str008 (5) 8 1. ELEMENTY TEORII FUNKCJI ZMIENNEJ ZESPOLONEJ Z wyrazów ciągu (1.4) tworzymy nowy ciąg
str024 (5) 24 1. ELEMENTY TEORII FUNKCJI ZMIENNEJ ZESPOLONEJ Stąd po przekształceniach dla a 0 mamy(
str042 (5) 42 1. ELEMENTY TEORII FUNKCJI ZMIENNEJ ZESPOLONEJ Wyznaczyć składowe Kx i Ky wektora natę
str050 (5) 50 1. ELEMENTY TEORII FUNKCJI ZMIENNEJ ZESPOLONEJ Zauważmy teraz, że na O A = Jt mamy z =
20159 str096 (5) 96 1. ELEMENTY TEORII FUNKCJI ZMIENNEJ ZESPOLONEJ 96 1. ELEMENTY TEORII FUNKCJI ZMI
75799 str120 (5) 120 I. ELEMENTY TEORII FUNKCJI ZMIENNEJ ZESPOLONEJ dwóch cięć (rys. 1.44), homograf
79652 str018 (5) 18 1. ELEMENTY TEORII FUNKCJI ZMIENNEJ ZESPOLONEJ Zadanie 2.7. Przez powierzchnię p
83008 str052 (5) 52 1. ELEMENTY TEORII FUNKCJI ZMIENNEJ ZESPOLONEJ 88 52 1. ELEMENTY TEORII FUN
str012 (5) 12 I. ELEMENTY TEORII FUNKCJI ZMIENNEJ ZESPOLONEJ Funkcja zespolona zmiennej rzeczywistej
więcej podobnych podstron