58617 Slajd81 (8)
Planowanie:
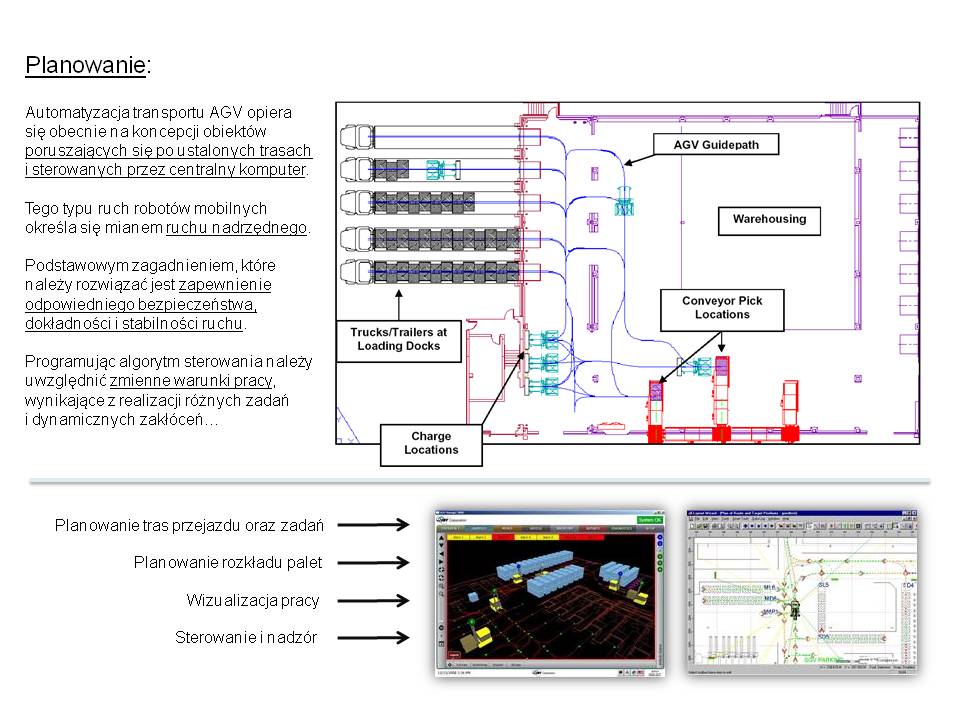
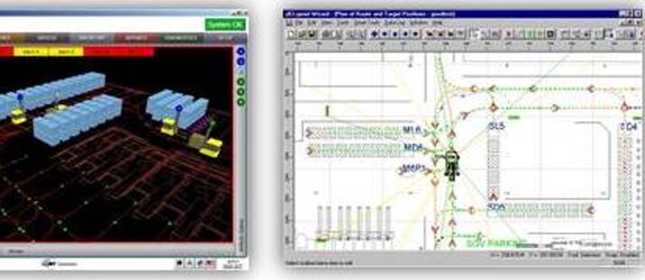
Automatyzacja tran sportu AGV opiera się obecnie na koncepcji obiektów poruszających się po ustalonych trasach i sterowanych przez centralny komputer.
Tego typu ruch robotów mobilnych określa się mianem ruchu nadrzędnego.
Podstawowym zagadn ien iem. które należy rozwiązać jest zapewnienie
0 d p o w i e d n i e q o b ez p i e cz e ń stw a, dokładności i stabilności ruchu.
Programując algoiytm sterowańia należy uwzględnić zmienne warunki pracy, wynikające z realizacji różnych zadań
1 dynamicznych zakłóceń...
Planowanie tras przejazdu oraz zadań Planowanie rozkładu palet Wizualizacja pracy Sterowanie i nadzór


Wyszukiwarka
Podobne podstrony:
Slajd82 Ucząca się organizacja organizacja oparta na wiedzy, rozumiana jako koncepcja zarządzania, o
I#§p$ kąm 0WI nyę I wa MjpKul Transport samochodowy, obok tran.sportu kolejowego i żeglugi
Planowanie zaopatrzenia materiałowo-technicznego w przedsiębiorstwie 3 3 1 przemysłowym opiera się
Opracował: dr inż. Artur JAWORSKI Katedra Silników Spalinowych i Tran sportu Charakterystyka rozpędz
Opracował: dr inż. Artur JAWORSKI Katedra Silników Spalinowych i Tran sportu fotodiodach. W każdej z
Opracował: dr inż. Artur JAWORSKI Katedra Silników Spalinowych i Tran sportu Próba wybiegu realizowa
Opracował: dr inż. Artur JAWORSKI Katedra Silników Spalinowych i Tran sportu sumarycznej sile oporów
Rzeczpospolita Polska GŁÓWNY INSPEKTOR TRAN SPORTU DROGOWEGOZaświadczenieo złożeniu z wynikiem
Logistyka opiera się na planowaniu organizowaniu, kierowaniu i kontroli. Logisty Jak
58075 Zdjęcie185 (2) Projektowanie statyczne i dynamiczne hydraulicznych układów automatyki opiera&n
więcej podobnych podstron