82255 P1080286
7: Napędy robrów przemysłowych
Przekładnie mechaniczne robolów powinny charakteryzować się [74J; wy* soką dokładnością przenoszenia ruchu, bczluzowością, małymi momentami bezwładności wirujących mas i dużą sztywnością skrętną. Liczbowe wartości tych kryteriów, określających działanie przekładni, do napędu robotów przcdsia* winno w tabl* 7,1 [74J,
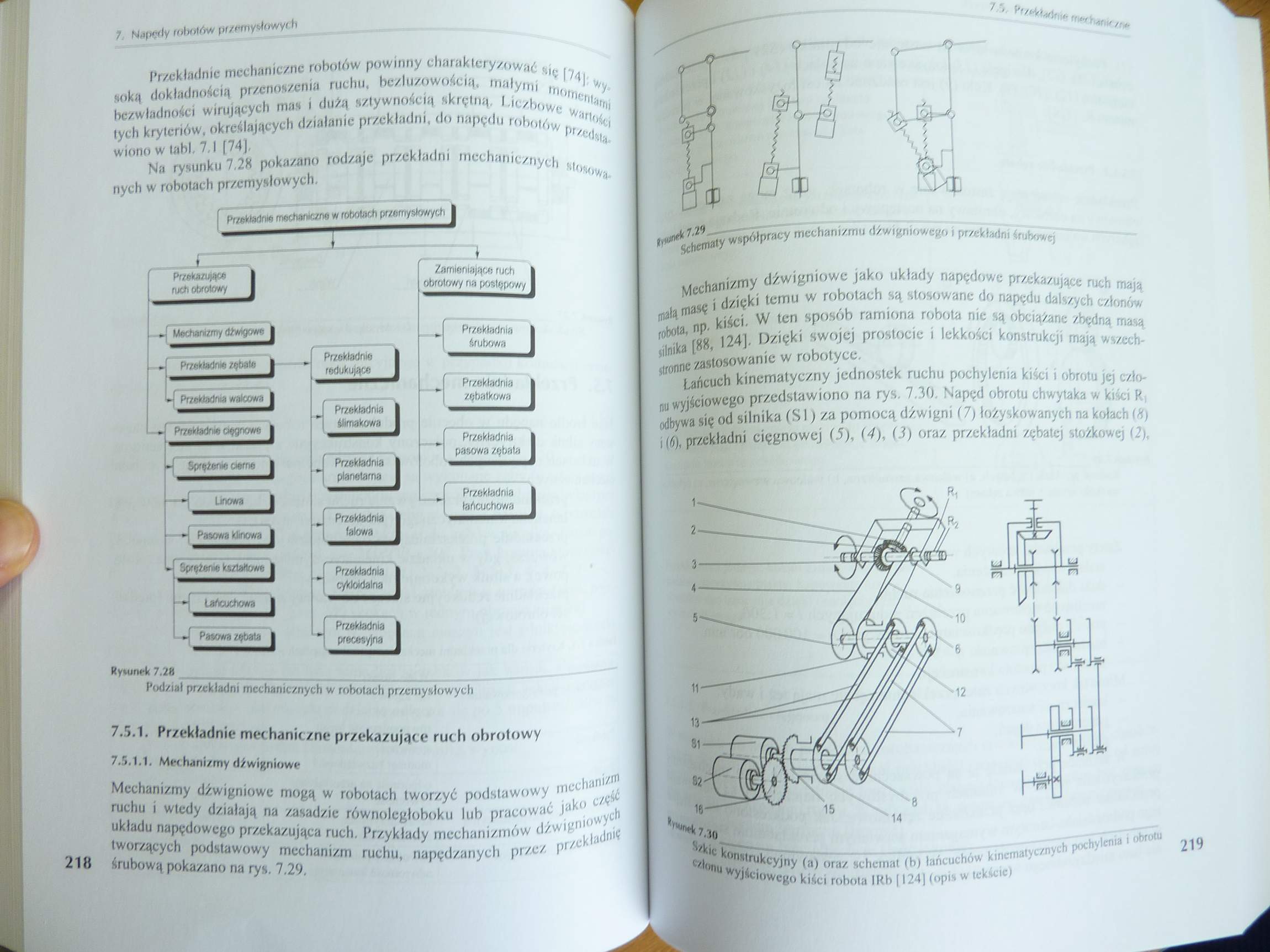
Na rysunku 7,28 pokazano rodzaje przekładni mechanicznych stosowa* nych w robotach przemysłowych.
Przekładnie mechaniczne w robolach przemysłowych
I
Piwtomjm ruch obrotowy
Mechanizmy dź»0pcw
Przekładnie zębete
dfu»#alMwa|
*^8pr^wWern*|
Uoows
Przekładnie
redukujące
•fiPaeowa Winowa
J
Sprężenie kształtowe
■^jtafcuchowj^J
J Przekładnia I j ślimakowa \
J Przekładnia |
| planetarna I
Przekładnia | tatowa J
[ Przekładnia | ~*[ cyktołdalna I
J Przekładnia I *’] procesyjna I
|
Zamieniające ruch 1 obrotowy na postępowy | | |
|
H |
Przekładnia I śrubowa |
|
- |
Przekładnia | zębatkowa |
|
H |
Przekładnia 1 pasowa zębato 1 |
|
H |
Przekładnia | łańcuchowa ] |
Rysunek 7.28______________
Podział przekładni mechanicznych w robotach przemysłowych
7.5.1. Przekładnie mechaniczne przekazujące ruch obrotowy
7.5.1.1. Mechanizmy dźwigniowe
Mechanizmy dźwigniowe mogą w robotach tworzyć podstawowy mechanizm ruchu i wtedy działają na zasadzie równolcgłoboku lub pracować jako część układu napędowego przekazująca ruch. Przykłady mechanizmów dźwigniowych tworzących podstawowy mechanizm ruchu, napędzanych przez przekładnię 218 śrubową pokazano na rys. 7.29,
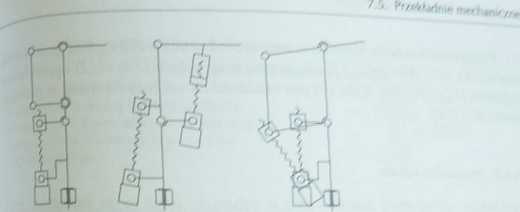
Schematy współpracy mechanizmu dżwignlewego i przekładni Inihcwej
Mechanizmy dźwigniowe jako układy napędowe przekazujące ruch mają małą masę i dzięki temu w robotach są stosowane do napędu dalszych członów robota, np, kiści. W ten sposób ramiona robota nie są obciągane zbędna masą silnika [88, 124]. Dzięki swojej prostocie i lekkości konstrukcji mają wszech-stronne zastosowanie w robotyce.
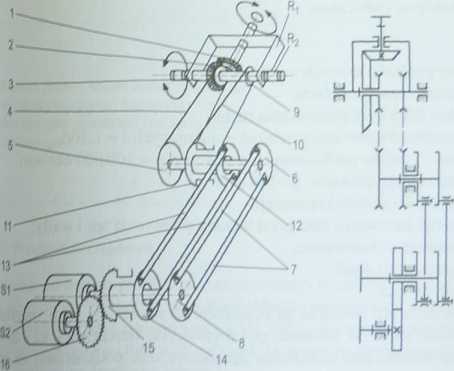
Łańcuch kinematyczny jednostek ruchu pochylenia kiści i obrotu jej członu wyjściowego przedstawiono na rys. 7.30. Napęd obrotu chwytaka w kiści R, odbywa się od silnika (S1) za pomocą dźwigni (7) łożyskowanych na kołach (H) i (ó), przekładni cięgnowej (5), (4), (i) oraz przekładni zębatej stożkowej (2),
*h**fyj0_I
Szkic konstrukcyjny (a) oraz schemat (b) łańcuchów kinematycznych pochylenia i obrotu członu teściowego kiści robota (Rb [124] (opis w tekście) 219
Wyszukiwarka
Podobne podstrony:
81406 P1080290 7. Napędy robotów przemysłowych 7.5.3.I. Przekładnie planetarne Przekładnia planetarn
P1080288 7. Napędy robotów przemysłowych Przekładnie linowe są stosowane w robotach jako układy w za
P1080292 7. Napędy robotów przemysłowych Wskaźnik materiałochłonności typowej przekładni falowej ogó
P1080281 7. Napędy robotów przemysłowych - wirniki silników prądu przemiennego maj
P1080285 7. Napędy robotów przemysłowych 7. Napędy robotów przemysłowych VII III V Rysunek
22097 P1080289 7. Napędy robotów przemysłowych — pasowe z pasem zębatym, —
83218 P1080279 7. Napędy robotów przemysłowych Rysunek 7.14 _ Schemat blokowy serwonapędu tyrystorow
45696 P1080272 7. Napędy robotów przemysłowych go są obecnie powszechnie stosowane w robotyce. Jedna
73038 P1080282 7. Napędy robotów przemysłowych o stałej amplitudzie i zwykle stałym okresie oraz mod
więcej podobnych podstron