300 (24)

300_L Obliczanie obwodu magnetycznego mąszw^radi^jaog^
W praktycznych obliczeniach indukcji Bt można przyjąć k„ = /c^»06 oraz założyć, że m, = 0,2.
Kolejność obliczeń jest następująca. Wstępnie na podstawie oszaco-wanych wartości parametrów m0 oraz m, odczytuje się z wykresu — np, na rys. 9.10 — współczynnik kB. Po obliczeniu indukcji wg zależności (9.17a) oraz napięć magnetycznych — punkty 9.3 h-9.5, sprawdza się po. prawność założonych parametrów wg zależności (9.18). W przypadku niezgodności większej niż np. 3% dla parametru m0 oraz 10% dla parametru m,, obliczenia się ponawia, zakładając odpowiednio skorygowane ich wartości.
Przedstawiona metoda oraz wykresy podane na rys. 9.8 + 9.10 mogą być zastosowane do obliczania obwodu magnetycznego niezależnie od tego, jaką charakterystykę magnesowania ma ferromagnetyk — np. blacha magnetyczna rdzenia. Do projektowania wspomaganego komputerem podane na rys. 9.8 -r 9.10 wykresy można aproksymować wielomianami, np. drugiego lub czwartego stopnia. W pamięci maszyny przechowuje się wówczas tylko wartości dwóch lub czterech współczynników wielomianu, zamiast stabelaryzo-wanych zależności, np. kt = f (m0, m,).
Stosowane są także metody obliczania indukcji maksymalnej wykorzystujące aproksymację charakterystyki magnesowania blachy magnetyczne), a nie charakterystyki magnesowania obwodu magnetycznego maszyny. W pracy [9.7; 9.9] przedstawiono metodę, w której charakterystykę H = f[B) ferro-magnetyka aproksymuje się wielomianem
t
(9.19)
przy czym liczbę fc, określającą najwyższą potęgę wielomianu, dobiera się odpowiednio do wymaganego zakresu i dokładności aproksymacji. Bezhis-terezowa charakterystyka magnesowania ferromagnetyka spełnia warunek symetrii funkcji nieparzystej dlatego w wielomianie (9.19) powinny występować tylko nieparzyste potęgi indukcji, zatem: i = 1; 3; 5; _. W stosowanych aproksymacjach, jeżeli nawet k = 9, to tylko dwa lub trzy współczynniki a, / 0.
Zakładając, że rozkład pola magnetycznego w szczelinie
i - ln-1
(9210)
i przyjmując liczbę n członków nieparzystego rzędu », oblicza się wartości
301
9.2. Obliczanie indukcji maksymalnej w szczelinie
przepływu w tak dobranym zbiorze punktów x, żeby na ich podstawie można było łatwo obliczyć amplitudy fl, kolejnych n nieparzystych harmonicznych.
9.2.3. Pole magnetyczne w szczelinie maszyny synchronicznej
Szczelina robocza w maszynie synchroniczną jest kilka razy większa niż w maszynie indukcyjnej o porównywalnych parametrach znamionowych. Udział szczelinowego napięcia magnetycznego w przepływie jest więc duży w porównaniu z udziałem napięć w ferromagnetycznych częściach obwodu magnetycznego. Indukcja maksymalna zależy więc przede wszystkim od rozkładu przepływu 0(x) oraz szczeliny <5(x).
W maszynie o wirniku walcowym i Q„ żłobkach rozmieszczonych na całym obwodzie rozkład pola podczas biegu jałowego jest praktycznie podobny do rozkładu przepływu 0{x). Rozkład ten zależy od stosunku y0 = QJQm tj. liczby żłobków uzwojonych do wszystkich żłobków na obwodzie — p. 7.5.2.
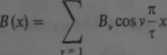
Rozkład przepływu pojedynczej cewki średnicową uzwojenia wzbudzającego wyraża się funkcją [9] — rys. 9.11

Rys. 9.11. Rozkład przepływu uzwojenia wzbudzającego maszyny synchronicznej o wirniku walcowym:
a) fragment rdzenia wirnika oraz rozkład liniowej gęstości prądu.
b) rozkład przepływu 0,(x) pojedynczą cewki oraz przepływu 0(r)
wszystkich cewek uzwojenia
Wyszukiwarka
Podobne podstrony:
314 (24) 274 _Obliczanie obwodu magnetycznego maszyn prąduano^^ v Rys. 9.21. Strefa jarzmowa slojana
316 (24) 9. Obliczanie obwodu magnetycznego maszyn prądu przemień 9. Obliczanie obwodu magnetycznego
322 (24) 322 9. Obliczanie obwodu magnetycznego maszyn prądu przemień™,**9.6. Napi
324 (24) 324 9. Obliczanie obwodu magnetycznego maszyn prądu przemh fazowych. Projektując maszynę ob
272 (25) 272 & Obliczanie wymiarów uzwojeń i obwodu magnetycznego Pole powierz
274 (28) 274 A Obliczanie wymiarów uzwojeń i obwodu magnetycznego lf _ "i. V ,
276 (25) 276 _fl Obliczanie wymiarów uzwojeń i obwodu magnetycznego maszyn 4 4-- Ir krąglonymi naroż
278 (25) 278 8. Obliczanie wymiarów uzwojeń i obwodu magnetycznego masm czy prawidłowo oszacowano ws
280 (30) 2QQ & Obliczanie wymiarów uzwojeń i obwodu magnetyt Rys 8.4. Żłobek prostokątny wirni
282 (25) 282 8 Obliczanie wymiarów uzwojeń i obwodu magnetycznego maszyn klatkowyc
286 (23) 286 9. Obliczanie obwodu magnetycznego maszyn prądu nrr~ Rys. 9.1. Oznaczenia do zależności
288 (23) 288 & Obliczanie obwodu magnetycznego maszyn prądu przemkną we — są n
290 (23) 290 9. Obliczanie obwodu magnetycznego maszyn prądu przemienne Tablica 9.1. Wielkości oblic
292 (25) 292 9. Obliczanie obwodu magnetycznego maszyn prądu pnemi — kształtu szcz
294 (26) 294_£_ Obliczanie obwodu magnetycznego maszyn prądu przemian, z uzwojeniem o ułamkowej licz
302 (27) 302 9. Obliczanie obwodu magnetycznego maszyn prądu przemian* przy czym kb, — współczynnik
304 (25) 304 9. Obliczanie obwodu magnetycznego maszyn prądu przemienne^ Jeśli natomiast nabiegunni
306 (23) (9.32,) 306_ 9. Obliczanie obwodu magnetycznego maszyn prąch — przy wzbudzaniu pola od stro
310 (22) I9 Obliczanie obwodu magnetycznego maszyn prądu Rys. 9.17. Żłobek: a) stojana, b) wirnika—z
więcej podobnych podstron