310 (22)
I
9 Obliczanie obwodu magnetycznego maszyn prądu
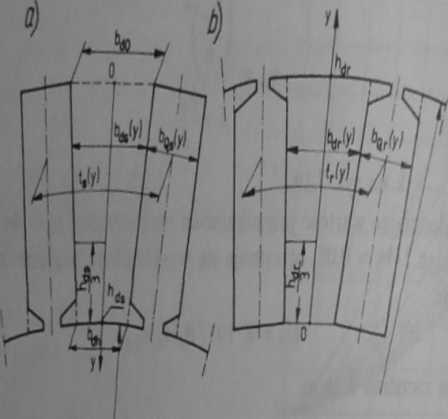
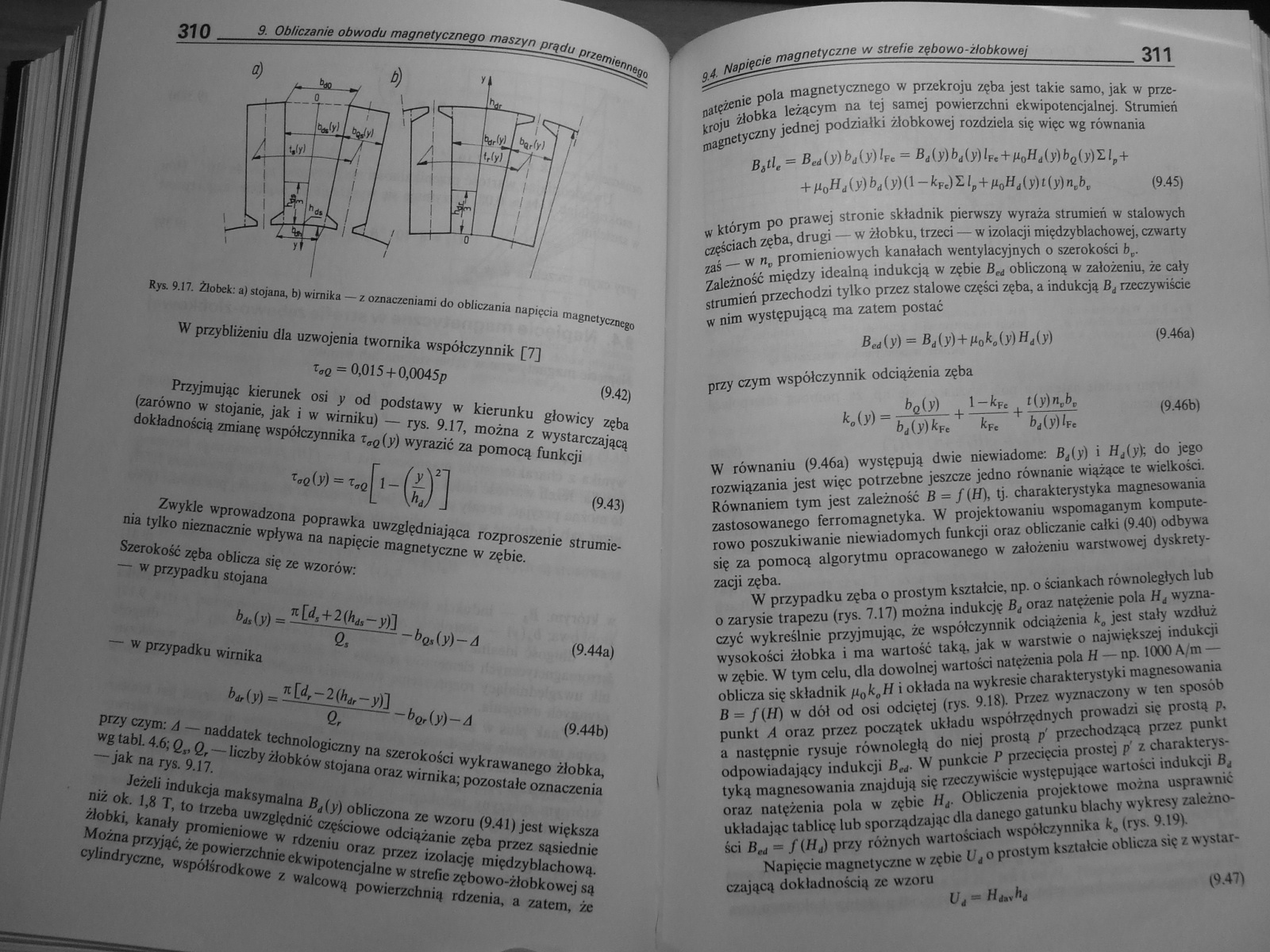
Rys. 9.17. Żłobek: a) stojana, b) wirnika—z oznaczeniami do obliczania napięcia magnetycznego
(9.42)
W przybliżeniu dla uzwojenia twomika współczynnik [7] T«rc = 0,015 + 0,0045/7
Przyjmując kierunek osi y od podstawy w kierunku głowicy zęba (zarówno w stojanic, jak i w wirniku) — rys. 9.17, można z wystarczającą dokładnością zmianę współczynnika t,c(y) wyrazić za pomocą funkcji
Zwykle wprowadzona poprawka uwzględniająca rozproszenie strumienia tylko nieznacznie wpływa na napięcie magnetyczne w zębie.
Szerokość zęba oblicza się ze wzorów:
— w przypadku stojana
(9.44a)
— w przypadku wirnika
przy czym: A — naddatek technologiczny na szerokości wykrawanego żłobka, wg tabl. 4.6; Q„ Q,—liczby żłobków stojana oraz wirnika; pozostałe oznaczenia —jak na rys. 9.17.
Jeżeli indukcja maksymalna Bd(y) obliczona ze wzoru (9.41) jest większa niż ok. 1,8 T, to trzeba uwzględnić częściowe odciążanie zęba przez sąsiednie żłobki, kanały promieniowe w rdzeniu oraz przez izolację międzybłachową. Można przyjąć, że powierzchnie ekwipotencjalne w strefie zębowo-żłobkowej są cylindryczne, współśrodkowe z walcową powierzchnią rdzenia, a zatem, że
(9.44b)
01 tniecie magnetyczne w strefie zębowo-żlobkowej
311
natężenie pola magnetycznego w przekroju zęba jest takie samo, jak w przekroju żłobka leżącym na tej samej powierzchni ekwipotencjalnej. Strumień magnetyczny jednej podziałki żłobkowej rozdziela się więc wg równania
Bttl. = BMbt(y)lr. = B,(y)My)/F«+/Wy)My)I/,+
+HoHi{y)bi{y){ 1 -kfe)lłp+n0Hi(y)t{y)n„bl, (9.45)
w którym po prawej stronie składnik pierwszy wyraża strumień w stalowych częściach zęba, drugi — w żłobku, trzeci — w izolacji międzyblachowęj, czwarty zaś — w nB promieniowych kanałach wentylacyjnych o szerokości b. Zależność między idealną indukcją w zębie obliczoną w założeniu, że cały strumień przechodzi tylko przez stalowe części zęba, a indukcją Bd rzeczywiście w nim występującą ma zatem postać
firf(y) = (9.46a)
przy czym współczynnik odciążenia zęba
(9.46b)
k (v)= W | l-^r« t(y)nvb, m MlFe *f« b4(y)lF.
W równaniu (9.46a) występują dwie niewiadome: Bd(y) i ffjfy); do jego rozwiązania jest więc potrzebne jeszcze jedno równanie wiążące te wielkości. Równaniem tym jest zależność B = f{H\ tj. charakterystyka magnesowania zastosowanego ferromagnetyka. W projektowaniu wspomaganym komputerowo poszukiwanie niewiadomych funkcji oraz obliczanie całki (9.40) odbywa się za pomocą algorytmu opracowanego w założeniu warstwowej dyskrety-zacji zęba.
W przypadku zęba o prostym kształcie, np. o ściankach równoległych lub o zarysie trapezu (rys. 7.17) można indukcję Bd oraz natężenie pola Hd wyznaczyć wykreślnie przyjmując, że współczynnik odciążenia k0 jest stały wzdłuż wysokości żłobka i ma wartość taką, jak w warstwie o największej indukcji w zębie. W tym celu, dla dowolnej wartości natężenia pola H — np. 1000 A/m — oblicza się składnik ft0k9H i okłada na wykresie charakterystyki magnesowania B = f(H) w dół od osi odciętej (rys. 9.18). Przez wyznaczony w ten sposób punkt A oraz przez początek układu współrzędnych prowadzi się prostą p, a następnie rysuje równoległą do niej prostą p' przechodzącą przez punkt odpowiadający indukcji B,d. W punkcie P przecięcia prostej p' z charakterystyką magnesowania znajdują się rzeczywiście występujące wartości indukcji Bd oraz natężenia pola w zębie Hd. Obliczenia projektowe można usprawnić układając tablicę lub sporządzając dla danego gatunku blachy wykresy zależności B* - przy różnych wartościach współczynnika k, (rys. 9.19).
Napięcie magnetyczne w zębie Ud o prostym kształcie oblicza się z wystarczającą dokładnością ze wzoru
U* - (9.47)
Wyszukiwarka
Podobne podstrony:
334 (22) 334 9. Obliczania obwodu magnetycznego maszyn prądu przemienne.^ szyra lub większym stopniu
336 (23) 336 g obliczanie obwodu magnetycznego maszyn prądu Rys. 9.35. Rozkład przepływu oraz pola m
286 (23) 286 9. Obliczanie obwodu magnetycznego maszyn prądu nrr~ Rys. 9.1. Oznaczenia do zależności
288 (23) 288 & Obliczanie obwodu magnetycznego maszyn prądu przemkną we — są n
290 (23) 290 9. Obliczanie obwodu magnetycznego maszyn prądu przemienne Tablica 9.1. Wielkości oblic
292 (25) 292 9. Obliczanie obwodu magnetycznego maszyn prądu pnemi — kształtu szcz
294 (26) 294_£_ Obliczanie obwodu magnetycznego maszyn prądu przemian, z uzwojeniem o ułamkowej licz
302 (27) 302 9. Obliczanie obwodu magnetycznego maszyn prądu przemian* przy czym kb, — współczynnik
304 (25) 304 9. Obliczanie obwodu magnetycznego maszyn prądu przemienne^ Jeśli natomiast nabiegunni
312 (26) 2^2 & Obliczanie obwodu magnetycznego maszyn prądu prze^j Blin PU 9.
316 (24) 9. Obliczanie obwodu magnetycznego maszyn prądu przemień 9. Obliczanie obwodu magnetycznego
318 (26) 318 9. Obliczanie obwodu magnetycznego maszyn prądu pr. lemtennto^ Zatem długość linii
322 (24) 322 9. Obliczanie obwodu magnetycznego maszyn prądu przemień™,**9.6. Napi
324 (24) 324 9. Obliczanie obwodu magnetycznego maszyn prądu przemh fazowych. Projektując maszynę ob
326 (21) 326 9. Obliczanie obwodu magnetycznego maszyn prądu przemienny — obciążen
328 (26) 328_L Obliczanie obwodu magnetycznego maszyn prądu przemienneonl 9.8.2. Rozproszenie strumi
330 (21) 330
332 (20) 332 9. Obliczanie obwodu magnetycznego maszyn prądu przemię hp2&CP21 = iP2
DSCF1270 296 m Obliczanie obwodu magnetycznego maszyn prądu przemiennenn rys. 9.6.
więcej podobnych podstron