355 (8)
355
18 Wybór drogi oceanicznej z uwzględnieniem warunków pogodowych
18.11. Matematyczne modele optymalizacji
Metoda heurystyczna jest najbardziej praktyczną metodą planowania nawigacji statku na trasie minimalnoczasowej. Metodę tę można stosować we wszystkich aspektach związanych z planowaniem nawigacji. Zwykle algorytm jest zbieżny. Ponieważ metoda ta była opracowana do zastosowania graficznego (ręcznego), dlatego źle napisany program może spowodować powstawanie pętli na izochronach. Metoda heurystyczna nie posiada dowodu matematycznego - można obliczyć tylko minimalny czas przejścia od A do H.
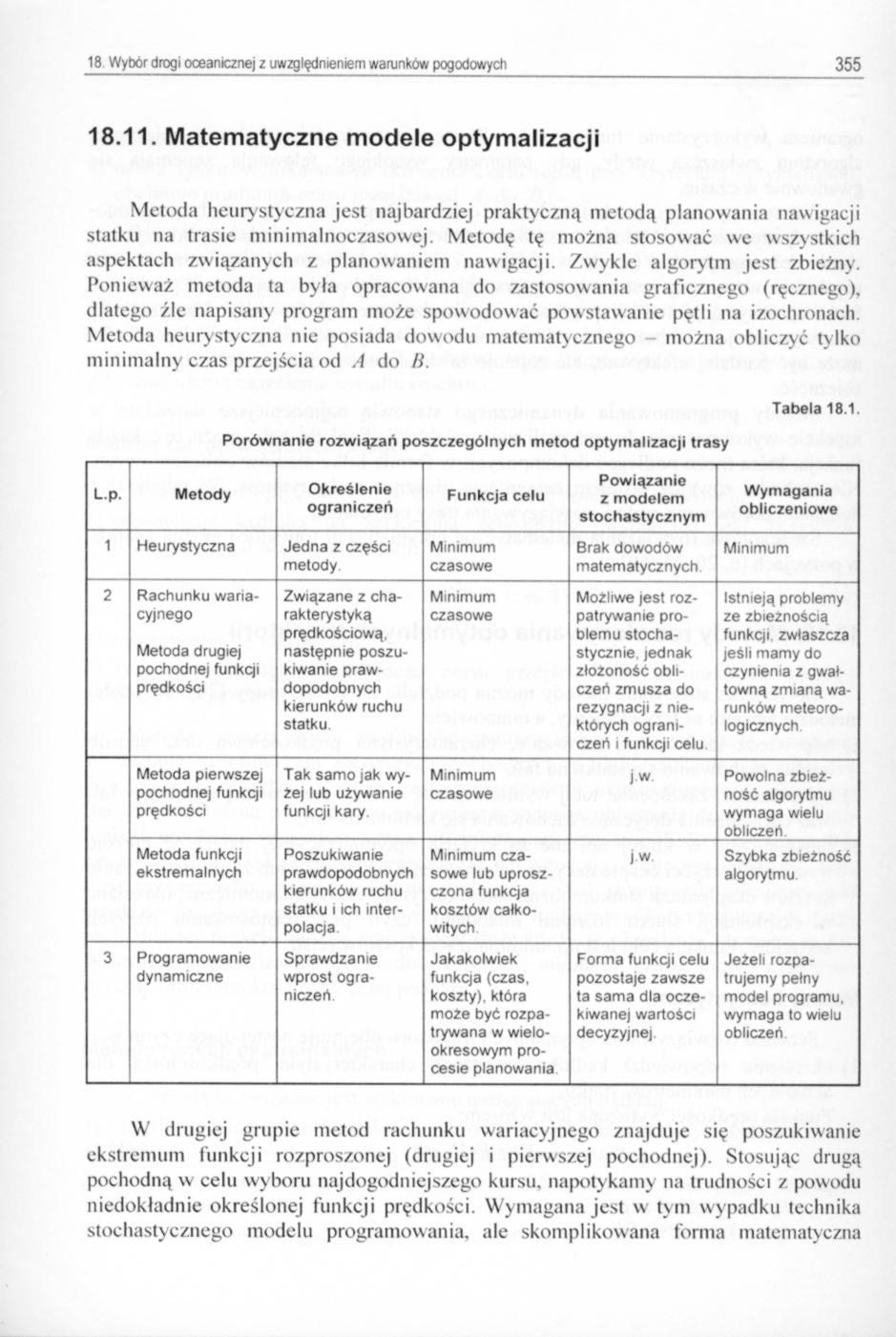
Tabela 18.1.
Porównanie rozwiązań poszczególnych metod optymalizacji trasy
|
L.p. |
Metody |
Określenie ograniczeń |
Funkcja celu |
Powiązanie z modelem stochastycznym |
Wymagania obliczeniowe |
|
1 |
Heurystyczna |
Jedna z części metody |
Minimum czasowe |
Brak dowodów matematycznych |
Minimum |
|
2 |
Rachunku wariacyjnego Metoda drugiej pochodnej funkcji prędkości |
Związane z charakterystyką prędkościową. następnie poszukiwanie prawdopodobnych kierunków ruchu statku |
Minimum czasowe |
Możliwe jest rozpatrywanie problemu stochastycznie. jednak złożoność obliczeń zmusza do rezygnacji z niektórych ograniczeń i funkcji celu |
Istnieją problemy ze zbieżnością funkcji zwłaszcza jeśli mamy do czynienia z gwałtowną zmianą warunków meteorologicznych |
|
Metoda pierwszej pochodnej funkcji prędkości |
Tak samo jak wyżej lub używanie funkcji kary |
Minimum czasowe |
j w |
Powolna zbieżność algorytmu wymaga wielu obliczeń | |
|
Metoda funkcji ekstremalnych |
Poszukiwanie prawdopodobnych kierunków ruchu statku i ich interpolacja |
Minimum czasowe lub uproszczona funkcja kosztów całkowitych |
jw |
Szybka zbieżność algorytmu | |
|
3 |
Programowanie dynamiczne |
Sprawdzanie wprost ograniczeń |
Jakakolwiek funkqa (czas. koszty), która może być rozpatrywana w wielo-okresowym procesie planowania |
Forma funkcji celu pozostaje zawsze ta sama dla oczekiwanej wartości decyzyjnej |
Jeżeli rozpatrujemy pełny model programu, wymaga to wielu obliczeń |
W drugiej grupie metod rachunku wariacyjnego znajduje się poszukiwanie ekstremum funkcji rozproszonej (drugiej i pierwszej pochodnej). Stosując drugą pochodną w celu wyboru najdogodniejszego kursu, napotykamy na trudności z powodu niedokładnie określonej funkcji prędkości. Wymagana jest w tym wypadku technika stochastycznego modelu programowania, ale skomplikowana forma matematyczna
Wyszukiwarka
Podobne podstrony:
334 (13) 18. WYBÓR DROGI OCEANICZNEJ Z UWZGLĘDNIENIEM WARUNKÓW POGODOWYCH18.1. Wiadomości ogóln
335 (10) 18 Wybór drogi oceanicznej z uwzględnieniem warunków pogodowych 335 na wybrane kryterium, s
339 (12) 18. Wybór drogi oceanicznej z uwzględnieniem warunków pogodowych 339 Informacje o falowaniu
341 (11) 18. Wybór drogi oceanicznej z uwzględnieniem warunków pogodowych 341 jednostki nawodnej (pa
343 (9) 18 Wybór drogi oceanicznej z uwzględnieniem warunków pogodowych 34318.6. Zachowanie się stat
345 (10) 18 Wybór drogi oceanicznej z uwzględnieniem warunków pogodowych 34518.7. Realizacja podróży
347 (9) 18 Wybór drogi oceanicznej z uwzględnieniem warunków pogodowych 34718.8. Rodzaje trajektorii
351 (9) 18 Wybór drogi oceanicznej z uwzględnieniem warunków pogodowych 35118.10.1. Prowadzenie stat
353 (10) 18 Wybór drogi oceanicznej z uwzględnieniem warunków pogodowych 353 a następnie miejscem pr
357 (8) 18 Wybór drogi oceanicznej z uwzględnieniem warunków pogodowych 357 2) okr
359 (7) 18 Wybór drogi oceaniczne) z uwzględnieniem warunków pogodowych 359 • ruch
361 (9) 18 Wybór drogi oceanicznej z uwzględnieniem warunków pogodowych 361 posiada tę właściwość, ż
363 (7) 18 Wybór drogi oceanicznej z uwzględnieniem warunków pogodowych 363 Rys. 18.15. Schemat algo
365 (10) 18 Wybór drogi oceanicznej z uwzględnieniem warunków pogodowych 365 Zachodzą przy tym nastę
367 (7) 18. Wybór drogi oceaniczne) z uwzględnieniem warunków pogodowych 367 Rys. 18.16. Organizacja
369 (7) 18 Wybór drogi oceanicznej z uwzględnieniem warunków pogodowych 369 Najważniejszym elementem
373 (7) 18 Wybór drogi oceanicznej z uwzględnieniem warunków pogodowych 373 kąt kursowy natarcia tab
337 (10) 18. Wybóf drogi oceanicznej z uwzględnieniem warunków pogodowych 337 Na rozwój metod optyma
349 (9) 18. Wybóf drogi oceanicznej z uwzględnieniem warunków pogodowych 349 Wydłużanie drogi AD obl
więcej podobnych podstron