36 (425)

-wektorowe silnika asynchronicznego przedstawiono na rys. 21.2. Jeżeli kąt 9<n/2 (rys. 21.2.b), wprowadzenie SEM E'd do obwodu wirnika powoduje wzrost SEM wypadkowej E'v. Zakładając stałą wartość impedancji wirnika (Z2 = const) ze wzrostem E[v wzrośnie
b)
R S T
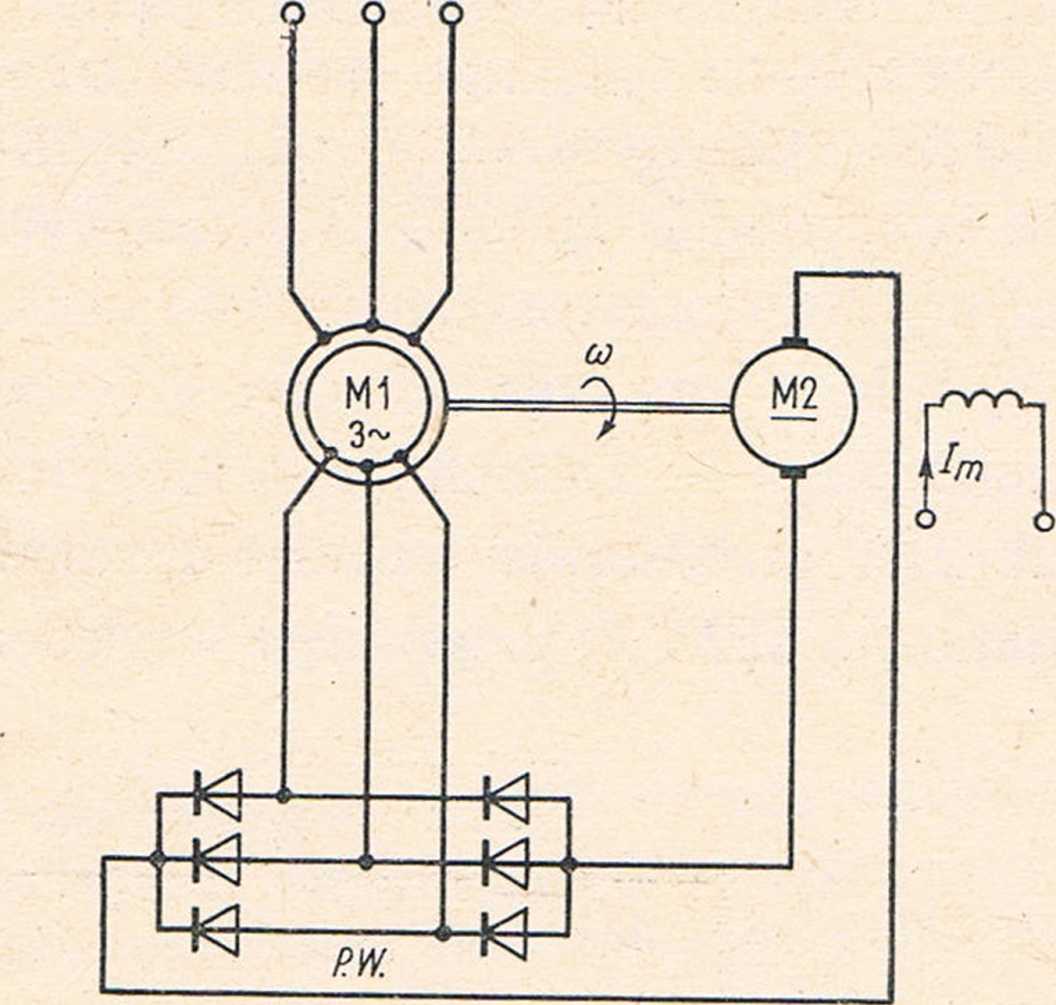
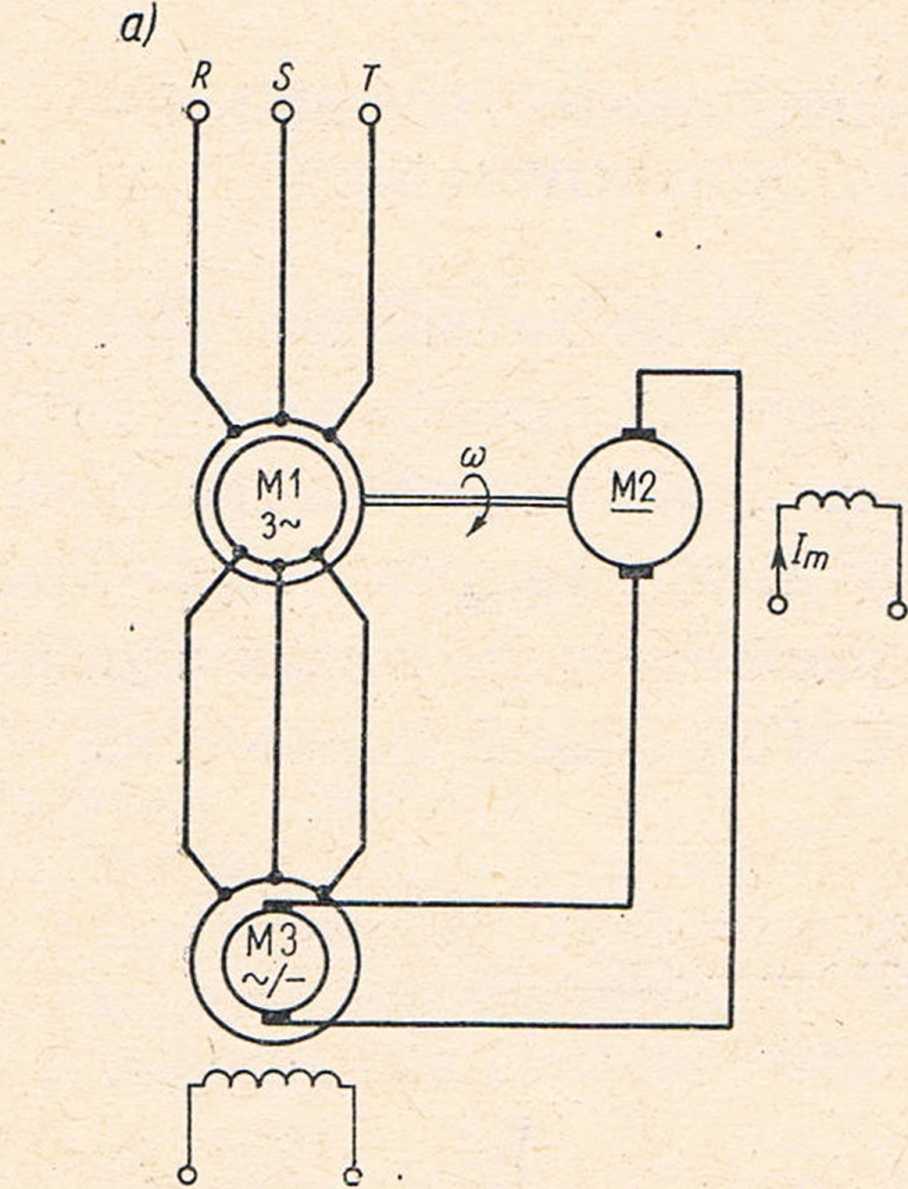
Rys. 21.3. Kaskada asynchroniczna na stałą moc: a) układ maszynowy Kramera, b) układ zaworowy
• i
z niesterowanym prostownikiem wirnikowym PW
prąd l2, a tym samym moment rozwijany przez silnik asynchroniczny, co doprowadzi do wzrostu prędkości kątowej układu. Przymałych kątach 9iE'd>E'2s równowaga momentu elektromagnetycznego i oporowego nastąpi przy ujemnym poślizgu, tj. przy prędkościach nadsynchronicznych.
Jeżeli kąt 9>n/2, (rys. 21.2c) wypadkowa siła elektromotoryczna^zmniejszy się, prąd V2 i moment zmaleje, co doprowadzi do zmniejszenia prędkości kątowej układu. Przy odpowiednio dobranej wielkości SEM E'd i kąta 6 można układ unieruchomić i przeprowadzić jego nawrót.
Maszynowe układy kaskadowe wymagały instalowania kilku maszyn wirujących. Najprostszym układem kaskadowym na stałą moc jest układ Kramera, w którym oprócz pierścieniowego silnika asynchronicznego instalowano przetwornicę częstotliwości i dodatkową maszynę prądu stałego (rys. 21.3.a). Regulacja prędkości kątowej w kaskadzie Kramera odbywa się drogą zmiany prądu wzbudzenia Im maszyny M2.
21.1.3. REGULACJA PRĘDKOŚCI KĄTOWEJ SILNIKA ASYNCHRONICZNEGO PIERŚCIENIOWEGO W UKŁADZIE KASKADY ZAWOROWEJ
Przemysłowa produkcja diod i tyrystorów pozwoliła na znaczne uproszczenia układów kaskad asynchronicznych. Przetwornicę częstotliwości zastąpiono prostownikiem sterowanym lub niesterowanym, co znacznie obniżyło koszt układu i pozwoliło na rozszerzenie zakresu stosowania kaskad asynchronicznych. Zaworową kaskadę asynchroniczną typu
i
P=const z niesterowanym prostownikiem w obwodzie wirnika przedstawiono na rys. 21.3b.
298
Wyszukiwarka
Podobne podstrony:
60370 instalacje117 4. TEORIA SILNIKA SKOKOWEGO 116 gdzie moment odniesienia (4.59) Krzywe przedstaw
Obraz0086 86 Graficznym obrazem zależności (436) jest wykres przedstawiony na rys. 436. Rys. 4.36. Z
instalacje067 1. WSTĘP 18 przedstawiono dwubiegunową wersję silnika hybrydowego. W sytuacji przedsta
153 3 Silnik NS03M - Mitsubishi Electrical Co., Ltd. Zgodnie ze schematem przedstawionym na rys. 6.6
Image049 Funkcję I (AND) dwóch zmiennych boolowskich przedstawiono na rys. 3.1. Każda liczba zmienny
Image050 operację sumy logicznej Y, jest przedstawiony na rys. 3.4. Napięcie baterii roz-świeci żaró
Image073 Układ służący do realizacji tej funkcji, zbudowany z bramek I (AND), LUB (OR), NIE (NOT) pr
Image075 Karnaugha. Sklejając tak, jak w tablicy przedstawionej na rys. 3.34a, otrzymuje się następu
Image078 Tablica wartości tej funkcji jest przedstawiona na rys. 3.36a. Ponieważ rozważana funkcja j
Image079 Tablica wartości tej funkcji przedstawiona na rys. 3.38a, a rozwiązanie zadania na rys.
Image098 r Bramka LUB-NIE (NOR) oraz LUB (OR) Schemat elektryczny bramki LUB-NIE — 02 przedstawiono
Image114 Przerzutnik JK-MS — 72 przedstawiono na rys. 4.53. Bramki 1 i 2 realizują funkcje K = KX*K2
Image119 czasu propagacji sygnału do stanu 0 na wyjściu od temperatury dla przerzutni-ka D przedstaw
Image161 Symbol graficzny rozpatrywanej pamięci z zaznaczeniem wszystkich linii sygnałów przedstawio
więcej podobnych podstron