439 (5)
20 Podstawy planowania nawigacji morskiej 439
Wydłużanie czasu przejścia może być spowodowane różnymi zakłóceniami, jak: lody, mgły, pola wysokiego falowania, konieczności kotwiczenia (schronienia) w miejscach osłoniętych, w oczekiwaniu na bezpieczne warunki pływania lub korzystne warunki poziomu wody. Inne przyczyny zmiany planu mogą być związane z nie przewidzianymi awariami systemów napędowych, sterowych, urządzeń nawigacyjnych. Dotyczy to również wypadków zdrowotnych członków załogi (pasażerów), kolizji itp., gdy zachodzi potrzeba interwencji lekarza z lądu.
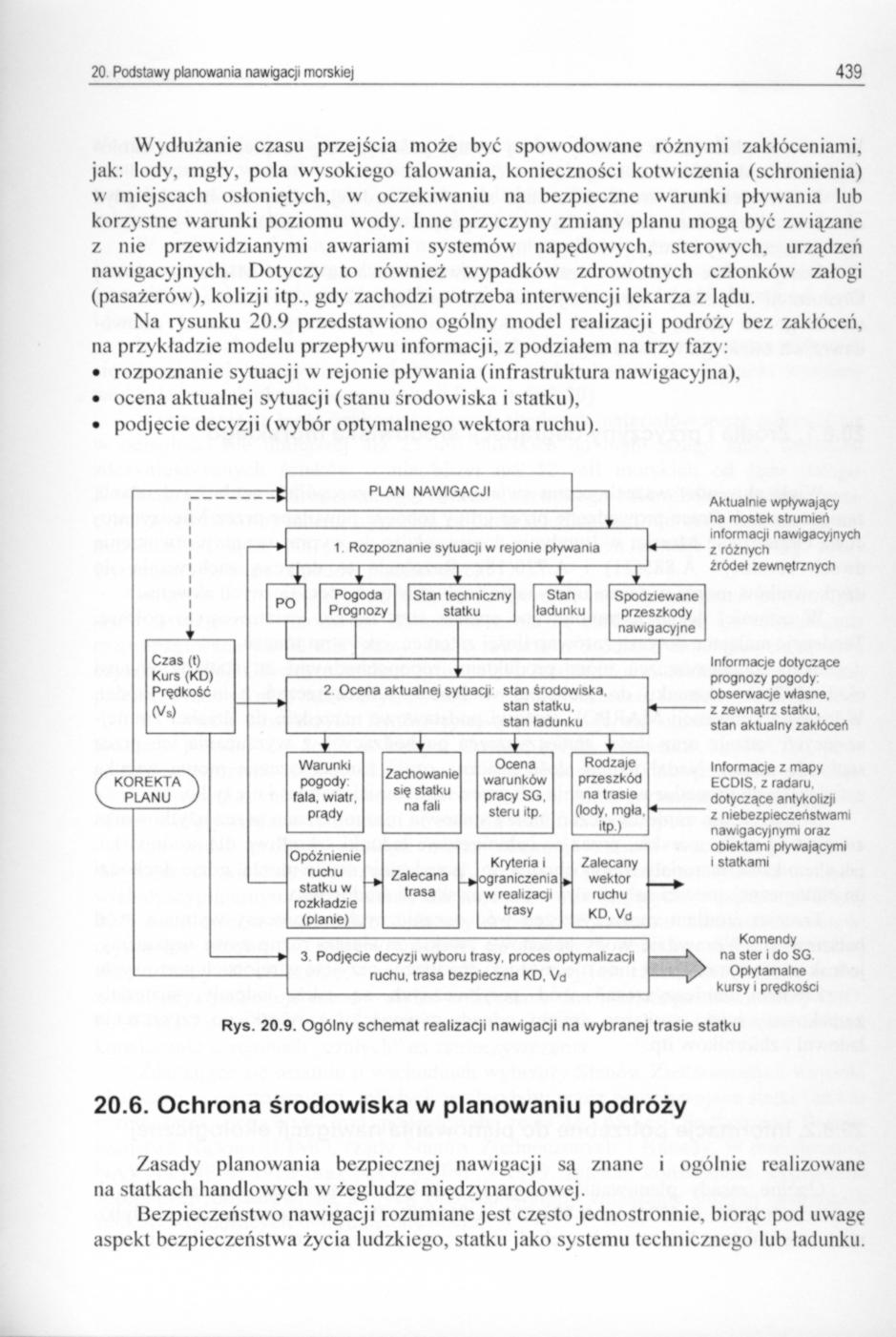
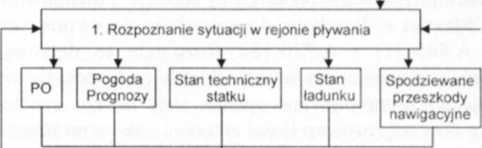
Na rysunku 20.9 przedstawiono ogólny model realizacji podróży bez zakłóceń, na przykładzie modelu przepływu informacji, z podziałem na trzy fazy:
• rozpoznanie sytuacji w rejonie pływania (infrastruktura nawigacyjna),
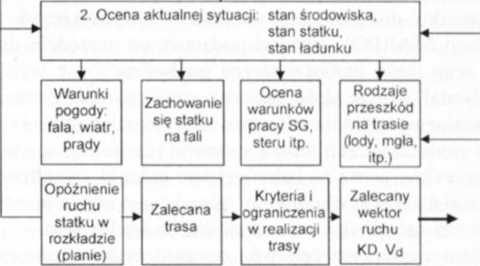
• ocena aktualnej sytuacji (stanu środowiska i statku),
• podjęcie decyzji (wybór optymalnego wektora ruchu).
( KOREKTA N ^ PLANU J
PLAN NAWIGACJI
Aktualnie wpływający na mostek strumień informacji nawigacyjnych z różnych
źródeł zewnętrznych
Informacje z mapy ECDIS, z radaru, dotyczące antykolizji z niebezpieczeństwami nawigacyjnymi oraz obiektami pływającymi i statkami
3 Podjęcie decyzji wyboru trasy, proces optymalizacji ruchu, trasa bezpieczna KO. Va
Informacje dotyczące prognozy pogody obserwacje własne, z zewnątrz statku, stan aktualny zakłóceń

Komendy na ster i do SG Opłytamalne kursy i prędkości
Rys. 20.9. Ogólny schemat realizacji nawigacji na wybranej trasie statku
20.6. Ochrona środowiska w planowaniu podróży
Zasady planowania bezpiecznej nawigacji są znane i ogólnie realizowane na statkach handlowych w żegludze międzynarodowej.
Bezpieczeństwo nawigacji rozumiane jest często jednostronnie, biorąc pod uwagę aspekt bezpieczeństwa życia ludzkiego, statku jako systemu technicznego lub ładunku.
Wyszukiwarka
Podobne podstrony:
426 (7) 20. PODSTAWY PLANOWANIA NAWIGACJI MORSKIEJ20.1. Struktura budowy planu podróży Zgodnie z kon
427 (5) 427 20 Podstawy planowania nawigacji morskiej20.2. Proces planowania podróży W każdej sytuac
431 (5) 20. Podstawy planowania nawigacji morskiej 431 ZBIÓR INFORMACJI (źródła dotyczące planowania
433 (5) 20 Podstawy planowania nawigacji morskiej 433 ograniczenia, jakie mogą pojawić się przy real
435 (6) 20 Podstawy planowania nawigacji morskiej 435 Szczegółowy plan sporządza się po uzgodnieniu
437 (5) 20 Podstawy planowania nawigacji morskiej 437 Rys. 20.7. Fragment szkicu w brulionie nawigac
441 (5) 20 Podstawy planowania nawigac
443 (5) 20. Podstawy planowania nawigacji morskiej 443 Rys. 20.10. Schemat uzupełniający do procesu
447 (5) 20 Podstawy planowania nawigacji morskie) 447 • obszary kotwicowisk, •
445 (7) 20 Podstawy planowania nawigacji morekiej 445 zawierają głównie informacje dotyczące wyboru
CCF20091012�040 46 Biojurysprudencja. Podstawy prawa dla XXI wieku z trzech możliwości: istnieje i m
Kwota ograniczenia (art. 19) Podstawa wymiaru składek na ubezpieczenie emerytalne i rentowe nie może
DSC00281 (20) Odległości pomiędzy budynkami z wyjątkiem bud. jednorodzinnych i zagrodowych • Nie moż
Wprowadzenie do podstaw automatyki Sygnał zakłócający jest to sygnał, który może być generowany
DSCN1618 /. Podstawy procesów odlewniczych 26 Szybkość wypełniania formy nie może być zbyt duża, gdy
33650 skanuj0127 (20) jakiś gest ręką, a n.i kontu ilni-Ęnjtyfr ósobę. Ćwiczenie może być wykonywane
więcej podobnych podstron