DSCF9322
pppftąjj rrwtody określenia krzyw*) dewiacji
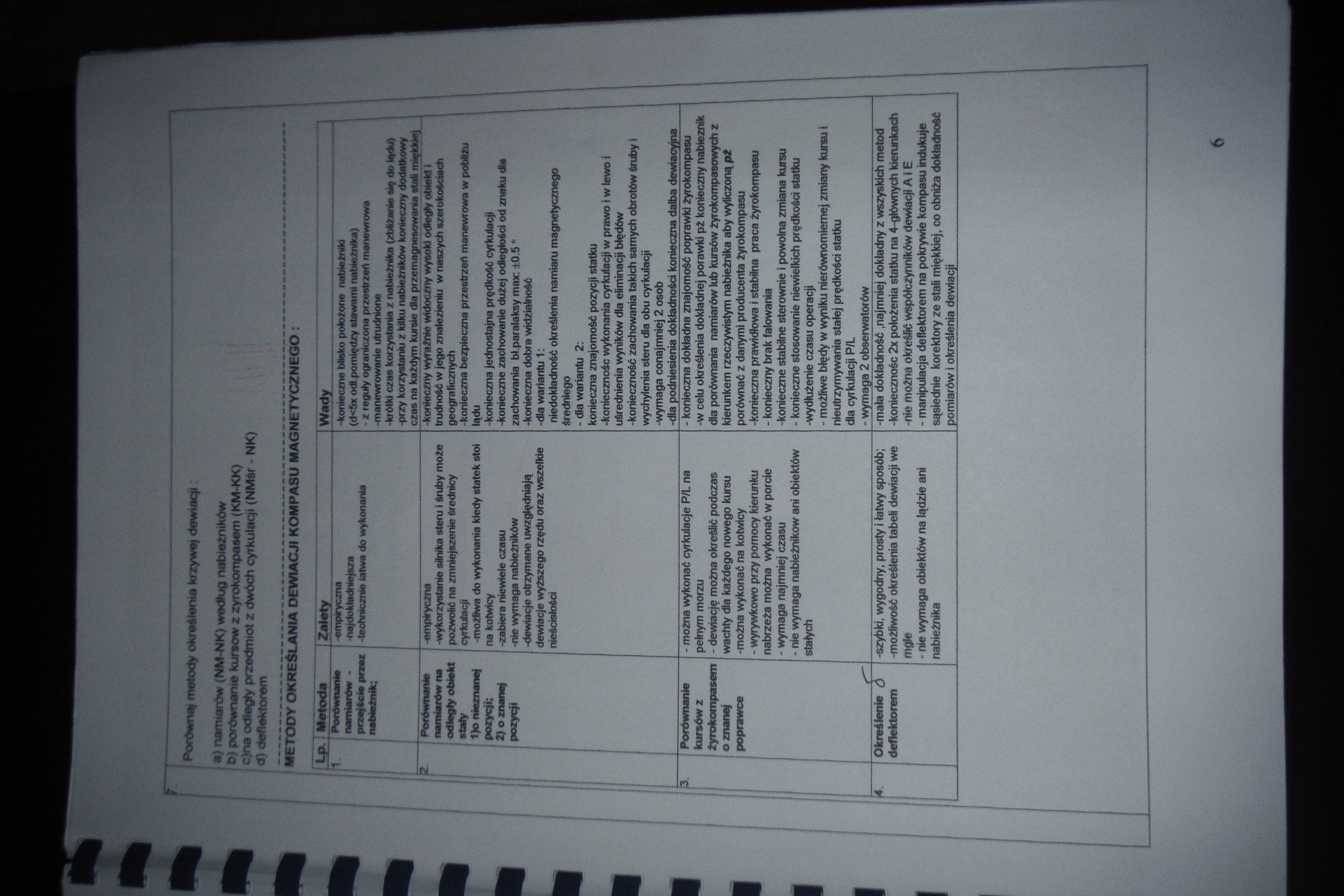
a) namiarów (NM-NK) według nabieżników
b) porównanie kursów z zyrokompasern (KM-KK)
c) na odtegly przedmiot z dwóch cyrkulacji (NMśr - NK)
d) detektorem
METODY OKREŚLANIA DEWIACJI KOMPASU MAGNETYCZNEGO :
|
Metoda |
Zalety |
Wady | |
|
1. |
iWMrtw • przejście przez nabteżnik; |
-empiryczna -najdokładniejsza -technicznie łatwa do wykonania |
-konieczne blisko położone nabieżhiki (d<6x od. po między stawami nabieżnika) • z reguły ograniczona przestrzeń manewrowa -manewrowanie utrudnione -krótki czas korzystania z nabieżnika (zbkżanie się do lądu) -przy korzystaniu z kilku nabieżników konieczny dodatkowy czas na każdym kursie dla przemagnetowania stal miękkiej |
|
2- |
Porównanie namiarów na odległy obiekt steły 1) o nieznani po*y«i'; 2) oznenei pozyck |
-empiryczna •wykorzystanie silnika eteru i śruby może pozwolić na zmniejszenie średnicy cyrkulacji -możfiwa do wykonania kiedy statek stoi na kotwicy -zabiera niewiele czasu -nie wymaga nabieżników -dewiacje otrzymane uwzględniają dewiacje wyższego rzędu oraz wszelkie nieścisłości |
-konieczny wyraźnie włdóćżrty wysoki odległy obiekt i trudność w jego znalezieniu w naszych szerokościach geograficznych -konieczna bezpieczna przestrzeń manewrowa w pobtżu lądu -konieczna jednostajna prędkość cyrkulacji -konieczne zachowanie dużej odległości od znaku da zachowania bł.paralaksy max: ±0.5 0 -konieczna dobra widzialność -dla wariantu 1: niedokładność określenia namiaru magnetycznego średniego - dla wariantu 2; konieczna znajomość pozycji statku •konieczność wykonania cyrkulacji w prawo i w lewo i uśrednienia wyników da eliminacji błędów -konieczność zachowania takich samych obrotów śruby i wychylenia steru da obu cyrkulacji -wymaga conajmniej 2 osób -da podniesienia dokładności konieczna dalba dewiacyjna |
|
3. |
Porównanie kursów z tyrofcompasein o znanej poprawce _ |
- można wykonać cyrkulacje P/L na pełnym morzu - dewiację można określić podczas wachty dla każdego nowego kursu -można wykonać na kotwicy - wyrywkowo przy pomocy kierunku nabrzeża można wykonać w porcie - wymaga najmniej czasu - nie wymaga nabieżników ani obiektów stałych |
- konieczna dokładna znajomość poprawki żyrokompasu -w celu określenia dokładnej porawki pż konieczny rtabieznik da porównania namiarów lub kursów żyrokompasowych z kierunkem rzeczywistym nabieżnika aby wyficzoną pi porównać z danymi producenta żyrokompasu -konieczna prawidłowa i stabflna praca żyrokompasu - konieczny brak falowania -konieczne stabilne sterownie i powolna zmiana kursu - konieczne stosowanie niewielkich prędkości statku -wydłużenie czasu operacji - możliwe błędy w wyniku nierównomiernej zmiany kursu i nieutrzymywania stałej prędkości statku da cyrkulacji P/L - wymaga 2 obserwatorów |
|
* |
Określenie ó deflektorem |
-szybki, wygodny, prosty i łatwy sposób; -możliwość określenia tabeli dewiacji we mgte - nie wymaga obiektów na lądzie ani nabieżnika |
-mała dokładność .najmniej dokładny z wszysłóch metod -konieczność 2x położenia statku na 4-głównych kierunkach -nie można określić współczynników dewiacji A i E - manipulacja deflektorem na pokrywie kompasu indukuje sąsiednie korektory ze stafi miękkiej, co obniża dokładność pomiarów i określenia dewiacji |

Wyszukiwarka
Podobne podstrony:
DSCF9302 Określić: a - tabelkę dewiacji (zał.) b - obliczyć współczynniki A,B,C,D,E j(
DSCF9363 Na statku „A" po kompensacji dewiacji kompasu określono pozostają dewiację metodą poró
Rozwiązanie ^yT]h O a = 25° Rys.42 Z przykładu 18 mamy, że /* = /,=(48) Określenie momentu dewiacji
273 (13) 14. Żegluga w warunkach zakłóceń zewnętrznych 273 3. Namiary
DSCF9327 nf j Dane są współczynniki dewiacji na statku nieprzechylonym: [ A= +1° B
IMG$80 *iąxYK i MKTOliA IM Ks* •» u. i« Ideo określają się bliżej (sc modifient) w zdaniu wedłu
Zdjęcie0074 I POMIAR DYDAKTYCZNY W . — # JEST TO: ■ Określenie poziomu osi^flni^ uczniów/studentow w
062 3 Moment siły określany jest w N • m, kN • m lub MN • m, względnie T • m według starych jednoste
Zdjęcie0074 I POMIAR DYDAKTYCZNY W . — # JEST TO: ■ Określenie poziomu osi^flni^ uczniów/studentow w
DSCF9316 1200 1^0 1240 (260 280 3C0 . 320 134Q* -NK, ~ 1068 i069 i 069 i 070 070 } 071 !072
DSCF9320 £ Na^ftfcu a po Kompensacji kompasu określono dewiacje metodą porównania namiarów na 8 kurs
DSCF9303 KM= ooa ; ^ 4<P (-O) Na statku gdzie dewiacja jest nieekompensowana określono5N*-10°a ME
DSCF9304 7. ! Opisz zaloty i wady metod określania (77?daw»acji) j kompensacji dewiacji kompasu magn
DSCF9312 Na statku gdzie dewiacja jest nieskompensowana określono S N = -10* a 5E = ♦I 2°. Określić
DSCF9336 i Na statku gdzie dewiacja fest nieskompensowana
DSCF9337 127. I Opisz zalety i wady metod określania (?77d«wiaqi) kompensacji dewiacji kompasu magne
DSCF9356 23 1 * ^ °^®^one na 8 kursach : 1 Dane wartość* KM OKREŚLANIE DEWIACJI KOMPASU MAOMETYCZMWÓ
DSCF9357 ‘ 25. } N* statku gdzie dewiacja jest nłeskompensowana jokreślono SN = -10° a SE * ♦I2°.
więcej podobnych podstron