fizyka007
Ruc mend}
Definicje prędkości i przyspieszenia. Wektory prędkości » i przyspieszenia a punktu materialnego poruszającego się w przestrzeni definiujemy następująco
dv
dt
(2.1)
gdzie r — wektor położenia punktu (zob. rys. 1-1), którego składowe w kartezjańskim układzie współrzędnych prostokątnych wynoszą x, y, z. Zatem składowe wektorów t> i a względem osi tego układu wyrażają się wzorami
|
dx |
dy |
dz |
(2.2a) |
|
: dt ’ |
°’ = 7T- |
D-" di | |
|
dvx |
do. |
dv. |
(2.2b) |
|
dt ’ |
a’ -• |
_ X a‘ = W |
a długości wektorów v i a, oznaczane przez v i a lub przez |r| i |a| są dane wzorami
v *> }/v\ + o, + v] , a = Val+a} + af (2.3)
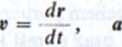
Wektory prędkości i przyspieszenia określone wzorami (2.1) są więc odpowiednio szybkością zmiany wektora położenia (jego wartości i kierunku) w czasie oraz szybkością zmiany wektora prędkości w czasie. Z definicji (2.1) wynika, że wektor prędkości jest w każdej chwili ruchu styczny do toru. Na rysunku 2-1 wektory vA i vB oznaczają prędkości w punktach A i B; są one styczne do toru. W ruchu krzywoliniowym wektor przyspieszenia nie jest styczny do toru.
Zapis kinematycznego równania ruchu, to znaczy postać funkcji r = — r (/) zależy od przyjętego układu współrzędnych. Dla ruchu na płaszczyźnie (rys. 2-1), składowe wektorów r, r, a w przyjętym układzie współrzędnych są funkcjami czasu i odpowiednio wynoszą: *(/) i y(t) dla wektora r (f), vx{t) i v,(t) dla wektora r (/) oraz ax(t) i ay(t) dla wektora a (/).
Kinematyczne równania ruchu prostoliniowego. W przypadku ruchu prostoliniowego, układ współrzędnych wybieramy tak, aby jedna z osi, na przykład oś Ox, pokrywała się z kierunkiem ruchu. Wówczas kinematyczne równanie ruchu przyjmuje postać tylko jednej funkcji czasu x = x (t). Znajomość tej funkcji pozwala określić bezpośrednio takie
o
y(t)
x(t)
X
Rys. 2-1
parametry ruchu, jak: położenie ciała w każdej chwili przez podanie współrzędnej x(t), odległość \x (t2)-x (/t)| między położeniami ciała w dowolnych dwu chwilach /, i f2, drogę przebytą przez ciało, prędkość średnią i inne, a za pomocą wzorów (2.2) także prędkość i przyspieszenie w dowolnym punkcie.
Jeżeli w chwili /, ciało zajmuje położenie x(/t), a w chwili t2 położenie x(t2), to jego prędkość średnia w przedziale czasu <flt f2> jest określona wzorem
x(/2)-x(r,)

(2.4)
Tak zdefiniowana prędkość średnia jest składową wektora prędkości średniej, przy czym znak tej składowej, a więc i zwrot wektora prędkości średniej na osi Ox zależy od znaku wyrażenia * (f2)-x (fj). Jeżeli w szczególności położenia początkowe i końcowe ciała pokrywają się (ciało powróciło do położenia wyjściowego), wówczas vif = 0. Prędkości średniej określonej wzorem (2.4) nic należy mylić ze średnią wartością (bezwzględną) prędkości
(2.5)
która w ogólności nie musi być równa prędkości średniej. We wzorze (2.5) oznacza całkowitą drogę przebytą w ciągu czasu \t2 — f2|.
i' 19
Wyszukiwarka
Podobne podstrony:
prędkość i przyspieszenie punktu materialnego (2) 1 Prędkość punktu materialnego 1 Prędkość punktu m
gdzie a - wektor przyspieszenia Przyśpieszenie a punktu materialnego jest wprost proporcjonalne do
Mechanika ogolna0005 10 Równanie wektorowe opisujące ruch punktu materialnego ma postać wynikającą z
Wektory: Zmianę położenia punktu materialnego nazywamy przemieszczeniem. Jeżeli punkt materialny por
Mechanika ogolna0005 10 Równanie wektorowe opisujące ruch punktu materialnego ma postać wynikającą z
Mechanika kolo gr A -■ ...... ■ 1. Wyznacz i narysuj wektory prędkości i przyspieszenia punktu D w d
Mechanika kolo gr B 1. Wyznacz i narysuj wektory prędkości i przyspieszenia punktu D w danym położen
Mechanika kolo gr A -■ ...... ■ 1. Wyznacz i narysuj wektory prędkości i przyspieszenia punktu D w d
s 180 180 prędkość kitowa tego koła a>2 ■ Przyspieszenie punktu A2 jest równe (ry».
Misiak9 Rys. 3.5. Do przykładu 3.5 Wektor prędkości bezwzględnej punktu Kvp = + Ł
gr B V,a i motocykl Zad. 1 Znaleźć dla zadanego położenia prędkość i przyspieszenie punktu B i C.0v
więcej podobnych podstron