2740390566
1. Wstęp
Powstaje wiele robotów manipulacyjnych, które osiągają zadane pozycje oraz odtwarzają zadane trajektorie. Większość takich robotów robi to z dużą prędkością, dokładnością i powtarzalnością, wykorzystując sterowanie silnikami odpowiedzialnymi za poszczególne przeguby takiego robota. Jest to stosunkowo proste podejście do problemu sterowania takim robotem, gdyż realizowany jest bezpośredni ruch każdego przegubu. Powstała myśl stworzenia manipulatora redundantnego o trzech stopniach swobody, który rozwiązywałby problem wyznaczania powtarzalnego algorytmu kinematyki odwrotnej aproksymującego w sposób optymalny, algorytm typu jakobianu pseudoodwrotnego [1].
1.1 Idea pracy
Aby móc wykonać robota realizującego przedstawiony problem, powstała potrzeba zaprojektowania konstrukcji mechanicznej oraz wykonania przekładni spełniającej założenia pracy. Schemat ideowy robota manipulacyjnego został przedstawiony na rysunku 1. Mechanizm działania jest następujący: na prowadnicy PI porusza się wózek W1 napędzany silnikiem Ml. Napęd z silnika jest przenoszony przez koło zębate zl, które współpracuje z listwą zębatą znajdującą się na prowadnicy P2, dzięki czemu wózek realizuje współrzędną zadaniową yl przez współrzędną xl. Na wózku W1 jest na stałe przymocowana obejma Wl' ruchomej prowadnicy P2. Za pomocą koła zębatego z2 oraz zębatki listwy P2, przesuwa się ona w kierunku prostopadłym do kierunku listwy PI. Kąt obrotu koła z2 jest sprzężony z kątem obrotu koła zl przez nieliniową przekładnię. Ruchy obu kół są sprzężone ciernie przez koło pośredniczące pomiędzy dwoma odpowiednio umieszczonymi względem siebie stożkami. Ruch koła pośredniczącego jest regulowany przez współrzędną x2. Na prowadnicy P2 zamocowany jest wózek, W2, który realizuje współrzędną x3 przez obrót koła zębatego z3 napędzanego za pomocą silnika M3. Położenie wózka jest opisane za pomocą współrzędnych yl i y2 [1].
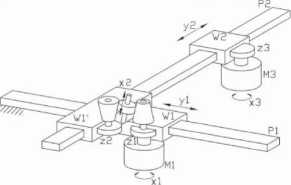
Rysunek 1 Schemat ideowy robota manipulacyjnego [1]
Wyszukiwarka
Podobne podstrony:
37049 skrypt078 80 Obecnie można spotkać wiele wykonań musików, które osiągają równow gę w sposób au
skrypt013 f Rozdział 1Wstęp W otaczającym nas środowisku powstaje wiele sygnałów, które do nas docie
22274 skanuj0022 (262) 64 II. OD POCZĄTKÓW — DO UPADKU POWSTANIA Stąd wiele piosenek Marota1, które
wykłady z polskiej składni�1 6 Wstęp Niniejsza książka powstała jako zapis wykładów, które od ponad
CCF20120401�042 Gdybyśmy uczynili komparatystykę religii częścią edukacji, powstałoby wiele trudnośc
skanuj0015 (224) cześnie doświadczenia te postawiły w zupełnie nowym świetle wiele poglądów i twierd
skanuj0037 (34) Roślinność siedlisk leśnych 72 w Polsce występuje bowiem wiele drzew i krzewów, któr
skrypt030 (2) lawiną elektronową. Elektrony tc zapoczątkowują powstawanie nowych lawin elektronowych
WAGA na fałszywe strony W Internecie jest wiele stron www, które piszą, ze gwaratują stypendium, jeż
page0093 85Repsoid — Resorbcyja Frauenhofer a i Reichenbach’a. Zbudował później wiele innych narzędz
page0109 POWSTANIR ORGANIZMÓW. 103 w wodach, które z razu pokrywały ziemię, zaczyna się pierwsze życ
więcej podobnych podstron