31142
(h) Określić równanie układu zatnkiięlep/.).
(b) W celu zbadania stabilności układu ranuu-ięiego II ir.ciod^ Lapunowa zdefiniowano fo-inę kwadrrtowo

.wizie Tl £ 3t . • katać warunki, które musi spełniać macierz Tl, aby .imkcja V mogła >ye jawtrzegana jzke propozycja,
ńinkcji Lagunowa.
(n) Wykazać, że pochodny po czasie fuaaeji opisanej równaniem (6) można przedstawić w postne: \' — —x~Qx, gdzie Q ^ R' n- Określi*' poste* ć macierzy Q biorąc pod uwagę definicję . :ikoj; V oraz rówi aule zar/.kniętegu iik'adu regulacji. Podać, jakie właściwości musi spełniać macń rz Q, aby na podstawie V i l ’ wnioskować o asymptotycznej stabilności piu:kt.:i 0.
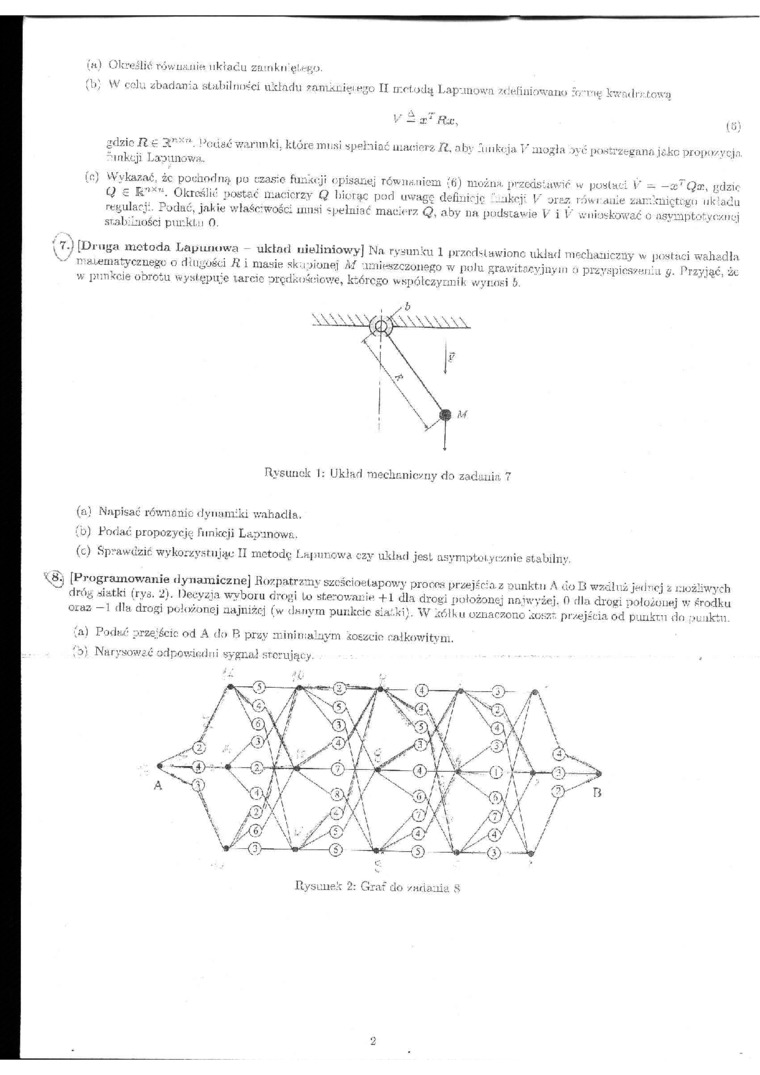
1 J [Oruga metoda Łapanowa układ nieliniowy] Nn rysnn:<u 1 przedstawione układ nii-chaniczny w postaci wahadła mateniatycziiego o długości R i masie skupionej A/ umieszczonego w polu grawitacyjnym n przyspieszeniu y. Przyi<jć, żc w punkcie obrotu występuje tarcic prędkowstowe, którego współczynnik wynosi b.
b
Rysunek I: Układ niechr.nic/uy do zacluuia 7
(a) Napisać równanie dynamiki wahadła.
(b) Podać propozycję funkcji La? inowa.
(c) Sprawdzić wykorzystując II metodę Łapanowa czy układ jest asymptoiyr/.nie stabilny.
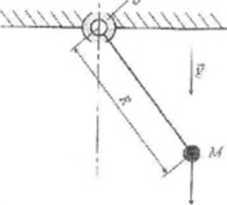
^ [Programowanie dynamiczne] Rozpatrzmy szcscioelapowy proces przeraz ounktu A uo B wzdłuż jednej z możliwych dn'»g datki (rys. 1). Decyzja wyboru drogi u> sterowanie +1 dla drogi położonej najwyżej. 0 dla drogi położonej w środku oraz -1 fila drogi położonej najniżej (w <buiym punkcie siar.ki;. W uólku oznaczono koszt przejścia od punktu dn .omletu.
{a) Podać przejście od A do B przy minimalnym koszcie całkowitym, r?) Narysować odpowiadai sygnał srcrująey.
; .•

c.
Rysunek 2: Graf do zwiania S
2
Wyszukiwarka
Podobne podstrony:
/• Zad. I Dla układu Rl.C przedstawionego na schemacie określić: -równania stanu (jako zmienne stanu
Dla układu RLC przedstawionego na schemacie określić: -równania stanu (jako zmienne stanu przyjąć pr
img283 Dlatego należałoby raczej określić równanie regresji wyższego stopnia, a następnie, po zbadan
Egzamin Podstawy automatyki 5 Politechnika Poznańska PP Rys. 1. Schemat do zadania 1. Polecenia: • &
BIOMECHANIKA POSTAWY STOJĄCEJ - PODSTAWOWE POJĘCIA Równowaga posturalna - to pewien określony stan u
str178 (3) 178 3. PRZEKSZTAŁCENIE LAPLACE’A 1 JEGO PEWNE ZASTOSOWANIA Stosując do każdego równania u
Meteory mają znaczenie przy określaniu wieku Układu Słonecznego (wszystkie meteory mają ten sam wiek
1 Postulaty mechaniki kwantowej 1.1 Postulat 1 (o stanie układu kwantowego) Jak określić stan układu
CCF20120509�071 Ł. M» V /pv 11. IYU£.WI<l#.<lllia I UU
Mechanika ogolna0070 140 Przykład 21 Określić reakcje układu płaskiego w punkcie C. W punkcie C ukła
69333 str178 (3) 178 3. PRZEKSZTAŁCENIE LAPLACE’A 1 JEGO PEWNE ZASTOSOWANIA Stosując do każdego równ
15169 Obraz (2419) 31. Donośność w rzucie ukośnym. Określamy donośność „a” , w tym celu do równania
Zadanie. (przykład zastosowania zmiennych fazowych jako zmiennych stanu, wyznaczenie równań układu i
więcej podobnych podstron