6830719718
Układy nieliniowe
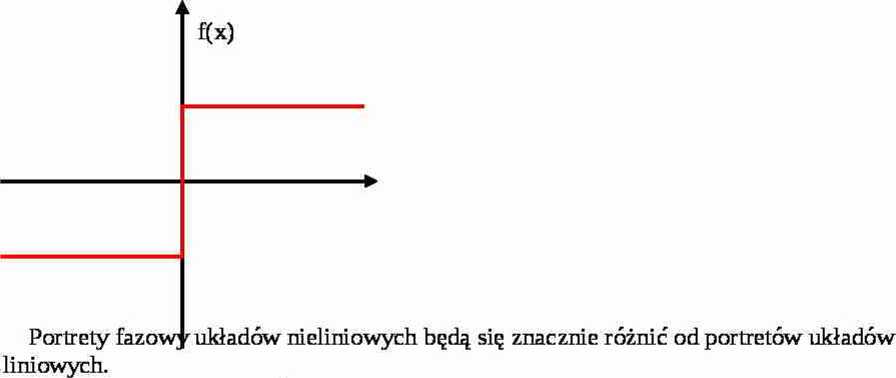
Wykonano portrety fazowe układu zwierającego człon nieliniowy w naszym przypadku był to węzeł stabilny z przekaźnikiem bez pętli histerezy (wykres poniżej). Ustawiono wartości ao=-l, ai=-2, a=7. Wykonano a f(xi), a f(x2) i a f(xi+X2). Trajektoria funkcji f(xi) ma swój punkt początkowy w pierwszej ćwiartce układu współrzędnych. Początkowo kształt trajektorii jest podobny do kształtu węzła stabilnego, ale im bliżej początku układu współrzędnych zaczyna zachowywać się podobnie do ogniska stabilnego (obiega ruchem okrężnym początek układu dążąc do zera). Kolejna trajektoria f(x2) zaczyna się w trzeciej ćwiartce układu współrzędnych i również zachowuje się na początku podobnie do trajektorii węzła stabilnego. Jednak nie przechodzi ona do czwartej ćwiartki układu i po osi xi dąży do zera. Trajektoria f(xi+xa) zachowuje się jak węzeł stabilny. Kierunek rysowania wszystkich trajektorii jest w kierunku środka układu współrzędnych tak jak dla węzła stabilnego.
W przypadku gdy równania układu są nieliniowe, istota postępowania przy konstruowaniu portretów fazowych jest nadal taka sarna. Bardzo często nieliniowość można przedstawić jako złożenie kilku obszarów we współrzędnych xi i X2, w których właściwości układu dają się opisać równaniami liniowymi. W wielu przypadkach mamy do czynienia z tzw. nieliniowością statyki. W takiej sytuacji struktura układu daje się rozbić na elementy dynamiczne liniowe i elementy nieliniowe, bezinercyjne (a więc opisane przez podanie charakterystyk statycznych).
W przypadku nieliniowości rzadziej mamy do czynienia z symetrią, ponadto układy takie mogą mięć kilka punktów osobliwych nie znajdujących się w początku układu współrzędnych.
Wniosku
Rozpatrzyliśmy wszystkie istniejące typy punktów osobliwych możliwych do uzyskania w układach liniowych.
We wszystkich przypadkach w układach liniowych był tylko jeden punkt osobliwy, który znajdował się w środku układu współrzędnych. W przypadku węzła i ogniska stabilnego trajektoria z upływem czasu zbliża się do punktu osobliwego, a więc do początku układu współrzędnych osiągając w końcu zarówno prędkość jak i przesunięcie równe zeru. Jest to cechą charakterystyczną układów stabilnych (dążenie do stanu równowagi).
Wyszukiwarka
Podobne podstrony:
Slajd2 (97) Cechy układy kierowniczego Niezależnie od rodzaju układu kierowniczego i typu pojazdu, w
instalacje099 80 3. STEROWANIE SILNIKÓW SKOKOWYCH silnika skokowego wykonany na Działanie układu jes
124 Rys.7.7. Interpretacja 3-fazowego układu mostkowego w połowie sterowanego (3T - 3D); a) schemat,
IManMMctMtonw układy nieliniowe - ENERGIA MAGNETYCZNA 4 podstawowe rodzaje energii
HPIM0857 7. Układy stfosoiyc/ne Schemat blokowy układu wizyjnego robotów Rysunek 7.23 Ąmji) Rysunek
5WW12 Sposób wykonania płytki drukowanej układu VOX przedstawiono na rys. 18. Układ BK (rys.T9) umoż
283 (17) 282 Rozdział 5. Układy regulacji impulsowej Transmitancję „z" układu otwartego można z
WMS II Vlf zestaw zadań z równań różniczkowych (lj, Narysc rysować portret fazowy układu równań — Ax
Po połączeniu, pełen portret fazowy układu: Zagadka: jak wygląda portret fazowy dla układu:
IManMMctMtonw układy nieliniowe - ENERGIA MAGNETYCZNA 4 podstawowe rodzaje energii
DSC07342 102 Układy równań liniowych Rozwiązaniem tego układu równań są liczby x = 0, y = I, z — 0,
11591 Str013 (7) 13 2.1. PRZYKŁAD OBLICZEŃDobrać silnik elektryczny oraz wykonać kinematyczne oblicz
124 Rys.7.7. Interpretacja 3-fazowego układu mostkowego w połowie sterowanego (3T - 3D); a) schemat,
Przestrzeń fazowa, ewolucja w czasie. Orbity, zbiory graniczne i portrety fazowe. Położenia równowag
więcej podobnych podstron