7090997021
przy założeniu, że więzy „m” nie pokrywają się z więzami „k”. Ponieważ mechanizm przedstawia sobą łańcuch kinematyczny, to do określenia jego ruchliwości stosujemy te same wzory strukturalne.
3.1.2. Klasyfikacja płaskich mechanizmów
Ogólnie przyjęto klasyfikację opracowaną przez Assura-Artobolewskiego, która opiera się na pojęciu grupy i 4 założeniach.
Grupą Assura nazywamy otwarty łańcuch kinematyczny, który dołączony do ostoi posiada ruchliwość zerową.
Przyjęte założenia:
1. Liczba członów napędzających równa jest ruchliwości mechanizmu.
2. Człony napędzające wchodzą w pary kinematyczne z ostoją.
3. Wszystkie pary kinematyczne rozpatrywanego mechanizmu są V klasy.
4. Człon napędzający wraz z ostoją tworzy grupę I klasy.
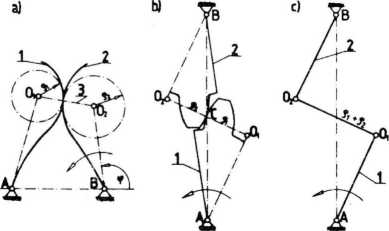
Jeśli w mechanizmie jest para IV klasy, np. krzywkowa (rys. 3.la), lub para zazębienia (rys. 2.Ib), to zastępujemy ją łańcuchem kinematycznym przez dołączenie 1 członu i 2 par Ol, 02 V klasy (rys. 3.1a,c).
Rys. 3.1. Sposób zastąpienia pary kinematycznej czwartej klasy, łańcuchem kinematycznym z parami V klasy.
Zgodnie z tą klasyfikacją złożone mechanizmy otrzymujemy w wyniku dołączenia do członu napędzającego grup Assura. Grupy Assura dzielą się na klasy, a wewnątrz każdej klasy na rzędy, zaś wewnątrz rzędów na postacie, odmiany i modyfikacje.
Klasę grupy Assura definiujemy powiększonym o jeden najwyższym wymiarem sympleksu euklidesowego, który w niej można wyodrębnić.
Sympleks posiada wymiar r, jeśli jest utworzony z r+1 wierzchołków, które w grupach Assura odpowiadają parom kinematycznym. Jeśli przyjąć umownie liczbę wierzchołków sympleksu za wymiar konturu, to klasę grupy można również zdefiniować wymiarem konturu. W tabl. 3.3 pokazano sympleksy: jednowymiarowy - człon, dwuwymiarowy - trójkąt złożony z 3 członów, trójwymiarowy - czworobok złożony z 4 członów, czterowymiarowy - pięciobok złożony z 5 członów.
20
Wyszukiwarka
Podobne podstrony:
Przy założeniu że gęstość cieczy nie zmieni się w przekroju C - C prędkość będzie taka sama jak w A
007 6 Zadanie 3 — rozwiązać zadanie o treści jak w zadaniu 2, lecz przy założeniu, że szukany okrąg
CCF20111010�023 45 Rozwiązanie Przy założeniu, że w badanej wodzie nie ma innych związków oprócz wym
DSC02097 Przy założeniu, że koszt urabiania nie zależy od rodzaju transportu, koszt ładowania wynosi
CCF20090212�051 których inni dokonują - czyli tego, że ich uwaga nie pokrywa się dokładnie ze spostr
P1000023 Belki oblicza się przy założeniu, że ścianka z sklejki z uwagi na swój kształt nie przejmuj
larsen0267 12. Gazy krwi 267 pojemności minutowej serca i odwrotnie - przy założeniu, że nie zmienił
DSC01856 (2) przy założeniu, że oś biegunowa pokrywa się z nieujemną półosią Ox (rys. 2.2) ZADANIA 1
skanuj0395 Z porównania wzorów 15.5 i 15.6 wynika, że hamulec ten nie nadaje się do pracy przy zmian
skanuj0395 Z porównania wzorów 15.5 i 15.6 wynika, że hamulec ten nie nadaje się do pracy przy zmian
IMGB11 (4) - wyznaczyć objętość materiału wsadowego (wzory 8 2, 8.3), przy założen
[ R2vlz-<i tona Sec™ V1
Podsumowanie: warto zauważyć, że granice skorupy ziemskiej i litosfery nie pokrywają się. Bowiem lit
5 (343) Ostatnia zależność opisuje widmo emisji F3 przy założeniu, że indeks modulacji Jest mały. Wi
przy założeniu, że wyrażenie-— = const. w zależności (7.8), tzn. że Ms, G oraz Io nie G • /„ zależą
str0060 unerwienie korzeniowe nie pokrywa się ze schematem pól zaopatrywanych przez poszczególne ner
76238 skanuj0001 (112) 7. OBLICZANIE OSIADAŃ FUNDAMENTÓW Osiadania fundamentów oblicza się przy zało
więcej podobnych podstron