3218343845
1. Wstęp 12
Przeanalizujmy teraz etap klasyfikacji. Spośród opisywanych publikacji część dotyczy rozwiązań wykrywających tylko układ dłoni [MB99, WHOO], w szczególności litery alfabetów palcowych [LK95, HMM97, WG02, Mar08]. Pozostałe rozwiązania rozpoznają również gesty. Wyraźnie zarysowana jest wśród nich tendencja dzielenia systemów klasyfikacji gestów na dwa etapy: etap rozpoznawania układu i trajektorii ruchu dłoni, oraz następujący po nim etap rozpoznawania gestów. Podejście to przedstawia Rysunek 1.1.
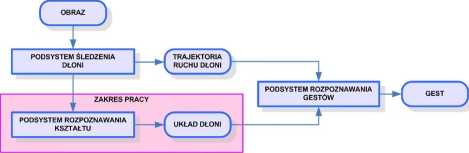
Rysunek 1.1. Schemat działania systemu wizyjnego rozpoznającego gesty dłoni.
Formalizację koncepcji podziału klasyfikacji na podetapy znaleźć można w [Wiir08] pod nazwą Organie Computing. Polega ona na dzieleniu domeny problemu na zadania, które są wykonywane przez autonomiczne podsystemy. Wszystkie podsystemy działają on-line i mogą dostarczać sobie nawzajem informacji wspomagających swoje działanie.
W [NROO] dowiedziono, że rozdzielenie rozpoznawania gestów języków migowych na etapy: klasyfikacji układu dłoni i trajektorii jej ruchu, może przynieść znaczny wzrost wydajności i dokładności systemu. Jest to możliwe dzięki zastosowaniu mechanizmów dostosowanych do każdego spośród wymienionych rozwiązań, zamiast konieczności szukania całościowego mechanizmu klasyfikacji.
W systemach rozpoznających gesty, etap klasyfikacji układu dłoni został wydzielony w [HH98, CWOO, IMiT+00, OB04, KvdMW07, PR07],
Istnieje szereg mechanizmów wykorzystywanych na etapie klasyfikacji. Są to najczęściej sieci neuronowe [MT91, HH98, MB99, NR99, SuOO, AJH01, WG02, YAT02], Ukryte Modele Markowa [AG98, SWP98, FGC+01, VM01, BK02, TSS02, OB04, KW05, KvdMW07], lub różne odmiany dopasowania wzorca (ang. pattern-matching) [Kad96, CWOO, STOO, SWOO, WHOO, SJM+06], w szczególności dopasowania grafu (ang. graph--matching) [KH95, LK95, TvdM98, BL99, HOOl, TvdM02, KvdMW07, Mar08] i analizy podprzestrzeni własnej (ang. eigenspace) [HMM97, IMiT+00, PR07].
Należy podkreślić, że sieci neuronowe i dopasowanie wzorca to metody używane najczęściej do klasyfikacji układu dłoni. Ukryte Modele Markowa stosowane są natomiast do rozpoznawania gestów.
Wyszukiwarka
Podobne podstrony:
I 137pisania. Rozprawka, cz. 1 12. Przeanalizuj, które części rozprawki stanowią wstęp, rozwinięcie
Wstęp stawiono w nim ich wielokryterialną klasyfikaqę, zasady funkcjonowania poszczególnych grup pod
img115 (12) Państwo też i ktoś inny spośród nas — nie tylko ja jeden. Więc przeko-b naj nas, panie ś
kem6 Wstęp 12 Wstęp 12 Die Wikinger, Otto Sched. Stuttgart. Ze zbiorów biblioteki Muzeum Art he
skanuj0007 (417) Wstęp 12 polskiemu. Rozumiemy jeszcze Prusa, gdy pisze o metalowym głosie pani Wito
Spis treści Przedmowa 9 Wstęp 12 1. Cyfrowe formy informacji 21 1.1. Bit i
skanuj0007 (417) Wstęp 12 polskiemu. Rozumiemy jeszcze Prusa, gdy pisze o metalowym głosie pani Wito
Slajd20 8 Przegląd technologii odlewniczychStopy aluminium - klasyfikacja Spośród metali nieżelaznyc
ksi ¬ki studia 4 292 Rozdział 18 Możemy teraz obliczyć, ile spośród czarnych krów jest homozygotami,
§12- 1. Dziekan, w porozumieniu z Rektorem, powołuje spośród nauczycieli akademick
instalacje064 1. WSTĘP 12 czesne rozwiązania z wykorzystaniem impulsów sinusoidalnych) oraz układ ro
78 P. T. SZYMAŃSKI [12] dopodobniej poprzez etap, w którym receptor wykazuje niskie powinowactw
70516 skanuj0005 (366) Ćwiczenie 5Badanie drgań układu dwóch sprzężonych wahadeł 5.1. Wstęp teoretyc
Str 133 Studnia w przypadku poziomej warstwy nieprzepuszczalnej Przeanalizujmy teraz dopływ wody do
Wstęp 12 Zasadniczym celem pracy jest rozpoznanie i sprecyzowanie naukowych podstaw uwzględnienia
więcej podobnych podstron