8851686519
Naziemny skaning laserowy obiektów inżynieryjno-drogowych 291
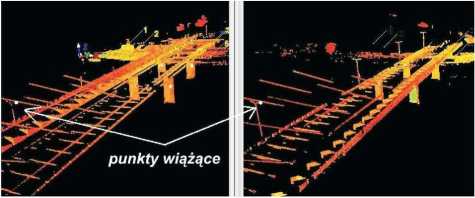
Rys. 8. Lokalizacja punktów wiążących (białe kropki) przy rejestracji ScanWorldl i ScanWorld2
Tabela i
Liczba punktów wiążących dla połączeń poszczególnych środowisk skanowania
|
Łączone środowiska skanowania |
Liczba punktów wiążących | |
|
ScanWorldl |
ScanWorld2 |
5 |
|
ScanWorld3 |
Scan World4 |
5 |
|
ScanWorld4 |
ScanWorldl |
4 |
|
ScanWorld4 |
ScanWorld5 |
5 |
Tabela 2
Wyniki wyrównania środowisk skanowania ScanWorldl, ScanWorld2, ScanWorld3, ScanWorld4 i ScanWorld5
|
Łączone środowiska skanowania |
Błąd średni [m] |
Średni błąd prawdziwy [m] |
Błąd minimalny [m] |
Błąd maksymalny [m] |
Liczba wykorzy stanych punktów | |
|
ScanWorldl |
ScanWorld2 |
0,015 |
0,008 |
0,000 |
0,095 |
179 233 |
|
ScanWorld3 |
ScanWorld4 |
0,016 |
0,009 |
0,000 |
0,099 |
540 300 |
|
ScanWorld4 |
ScanWorldl |
0,025 |
0,016 |
0,000 |
0,096 |
76 433 |
|
ScanWorld4 |
ScanWorld5 |
0,029 |
0,022 |
0,000 |
0,093 |
73 000 |
Następnie utworzone zostało nowe środowisko skanowania ScanWorldl SW1_ SW2_SW3_SW4_SW5, w którym zapisane zostały zarejestrowane, połączone w jeden układ współrzędnych chmury punktów. Finalny efekt dopasowania wszystkich środowisk skanowania, biorących udział w wyrównaniu, przedstawiono na rysunku 9.
Wyszukiwarka
Podobne podstrony:
Naziemny skaning laserowy obiektów inżynieryjno-drogowych 297 Rys. 12. Wiadukt Tryon, Stany
Naziemny skaning laserowy obiektów inżynieryjno-drogowych 289 Rys. 5. Pomiar tarcz celowniczych ze s
Naziemny skaning laserowy obiektów inżynieryjno-drogowych 295 Tabela 7 Wyniki wyrównania środowisk
299 Naziemny skaning laserowy obiektów inżynieryjno-drogowych WARIANT 1 rejestracja z wykorzystaniem
Naziemny skaning laserowy obiektów inżynieryjno-drogowych 301 Kolejnym etapem było przeprowadzenie
Naziemny skaning laserowy obiektów inżynieryjno-drogowych 303 Tabela 12 Wartości błędów otrzymane
Naziemny skaning laserowy obiektów inżynieryjno-drogowych 287 zawierały obszar wspólnego pokrycia
293 Naziemny skaning laserowy obiektów inżynieryjno-drogowych WARIANT 2® (a)u©© © rejestracja z
Biuletyn WAT Vol. LIX, Nr 2,2010Naziemny skaning laserowy obiektów inżynieryjno-drogowych MICHAŁ
Możliwości zastosowania naziemnego skaningu laserowego w leśnictwie Agata Wencel1 2, Piotr Wężyk3,
Możliwości zastosowania naziemnego skaningu laserowego w leśnictwie Agata Wencel1 2, Piotr Wężyk3,
więcej podobnych podstron