8851686520
292 M. Kędzierski, A. Fryśkowska, M. Wilińska
Zawiera ono wszystkie zeskanowane punkty, nawet te, które usunięto przed procesem rejestracji. Na powyższym obrazie, układ współrzędnych znajduje się w miejscu stanowiska skanowania 4, które wybrane zostało jako bazowe i do którego dopasowano pozostałe chmury punktów.
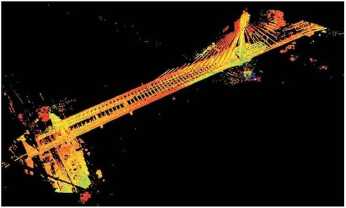
Rys. 9. Wynikowe środowisko skanowania ScanWorld SW1_SW2_SW3_SW4_SW5
2.1.2. Rejestracja chmur punktów przedstawiających most Świętokrzyski — wariant 2
Ze względu na to, że podczas skanowania dokonano szczegółowego pomiaru celów HDS, możemy wykorzystać kolejną metodę połączenia pozyskanych środowisk skanowania.
Proces rejestracji, oparty na metodzie wykorzystującej tarcze celownicze, polega na automatycznym dopasowaniu przez oprogramowanie odpowiadających sobie celów HDS z różnych środowisk skanowania. Schemat jej przebiegu przedstawiono na rysunku 10.
Środowiska skanowania ScanWorld 1 (I) i ScanWorld2 (2) oraz odpowiednio ScanWorld3 (3) i ScanWorld4 (4) zostały zarejestrowane metodą z wykorzystaniem tarcz celowniczych, a następnie połączone ze sobą oraz środowiskiem skanowania Scan World5 (5) metodą z użyciem manualnie wskazywanych punktów wiążących.
Wynik rejestracji środowisk skanowania ScanWorldl i ScanWorld2 przedstawiono w tabeli 3. Największy błąd, równy 0,027 metra, wystąpił przy wyrównaniu pomiarów celu o numerze 2. Spowodowane było to zbyt dużym kątem nachylenia tarczy względem skanera. Dlatego też tarcza 2 została wyeliminowana z dalszych obliczeń, a wyrównanie przeprowadzono raz jeszcze. Końcowe wartości błędów rejestracji zamieszczono w tabeli 4.
Wyszukiwarka
Podobne podstrony:
DSCF5612 1. Ziemniak 323 Zawiera ono wszystkie aminokwasy egzogenne i jako jedno z nielicznych białe
294 M. Kędzierski, A. Fryśkowska, M. Wilińska Wynikiem właściwej rejestracji jest środowisko skanowa
296 M. Kędzierski, A. Fryśkowska, M. Wilińska Rys. 11. Środowisko skanowania SW1_SW2_SW3_SW4_SW5 wis
298 M. Kędzierski, A. Fryśkowska, M. Wilińska Kolejnym etapem było szczegółowe pomierzenie tarcz
300 M. Kędzierski, A. Fryśkowska, M. Wilińska cd. tabeli
302 M. Kędzierski, A. Fryśkowska, M. Wilińska WARIANT 2 rejestracja z wykorzystaniem punktów
286 M. Kędzierski, A. Fryśkowska, M. Wilińska stanowisk skanera, umiejscowienia tarcz celowniczych o
304 M. Kędzierski, A. Fryśkowska, M. Wilińska Rys. 17. Środowisko skanowania ScanWorld SW2_SW3_SW5_S
288 M. Kędzierski, A. Fryśkowska, M. Wilińska Zdjęcia pozyskane przed skanowaniem będą przydatne w
290 M. Kędzierski, A. Fryśkowska, M. Wilińska 2.1.1. Rejestracja chmur punktów przedstawiających mos
img146 65. Sposrod wszystkich związków azotu wybierz te które mogą byc tylko
AZOFOAKA�6 tisnwunUprawa na słomie Do uprawy na słomie nadają się wszystkie gatunki boczniaka, nawet
b. Spis treści Powinien zawierać wykaz wszystkich części pracy z podaniem strony, na której rozpoczy
skanuj0004 (91) Gdyby roztwór zawierający kationy wszystkich grup poddać działaniu (NHjhCOj (w warun
skanuj0004 (91) Gdyby roztwór zawierający kationy wszystkich grup poddać działaniu (NHjhCOj (w warun
Slajd152 ZASADY PRAWIDŁOWEGO MONTAŻU WIERTNIC Zawiercanie otworu wszystkimi rodzajami narzędzi wiert
więcej podobnych podstron