
Maria Kotełko
Mechanika
i Wytrzymało
ść
Materiałów
————————————————————————————————————————
Zadanie nr 32 - Dostosowanie kierunku Automatyka i Robotyka
do prowadzenia studiów niestacjonarnych
2
Mechanika i …
Cz
ęść
I - Mechanika
Wykład 3.
1. Płaski układ sił zbie
ż
nych
2. Twierdzenie o trzech siłach
3. Moment siły wzgl
ę
dem punktu
4. Wypadkowa sił równoległych i anty-równoległych. Para sił.
5. Dowolny płaski układ sił
6. Redukcja dowolnego płaskiego układu sił
7. Warunki równowagi dowolnego płaskiego
układu sił
3
Mechanika i …
Warunek równowagi płaskiego układu sił
zbie
ż
nych
P
P
P
P
n
i
i
n
1
2
1
0
+ + + =
=
=
∑
...
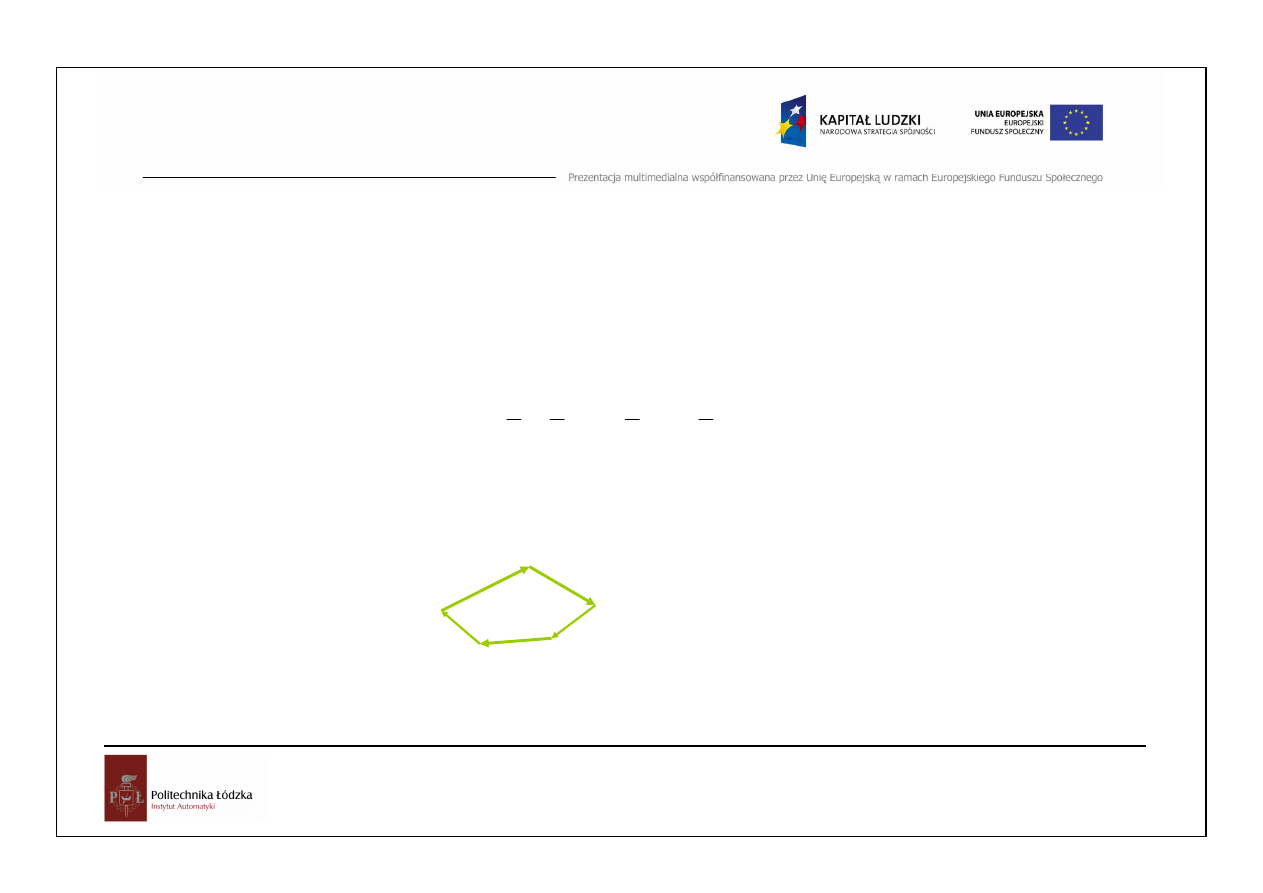
Warunkiem równowagi płaskiego układu sił zbie
ż
nych jest, aby ich
wypadkowa była równa zeru.
Ab y siły zbie
ż
ne P
1
, P
2
, ... działaj
ą
ce w jednej płaszczy
ż
nie, był y
w równowadze, wielobok z nich zbudowany (wielobok sił) musi by
ć
wielobokiem zamkni
ę
tym
.
4
Mechanika i …
Płaski układ sił zbie
ż
nych
Płaskim
układem
sił
zbie
ż
nych
nazywamy układ sił na płaszczy
ź
nie,
których linie działania przecinaj
ą
si
ę
w jednym punkcie.
P
1
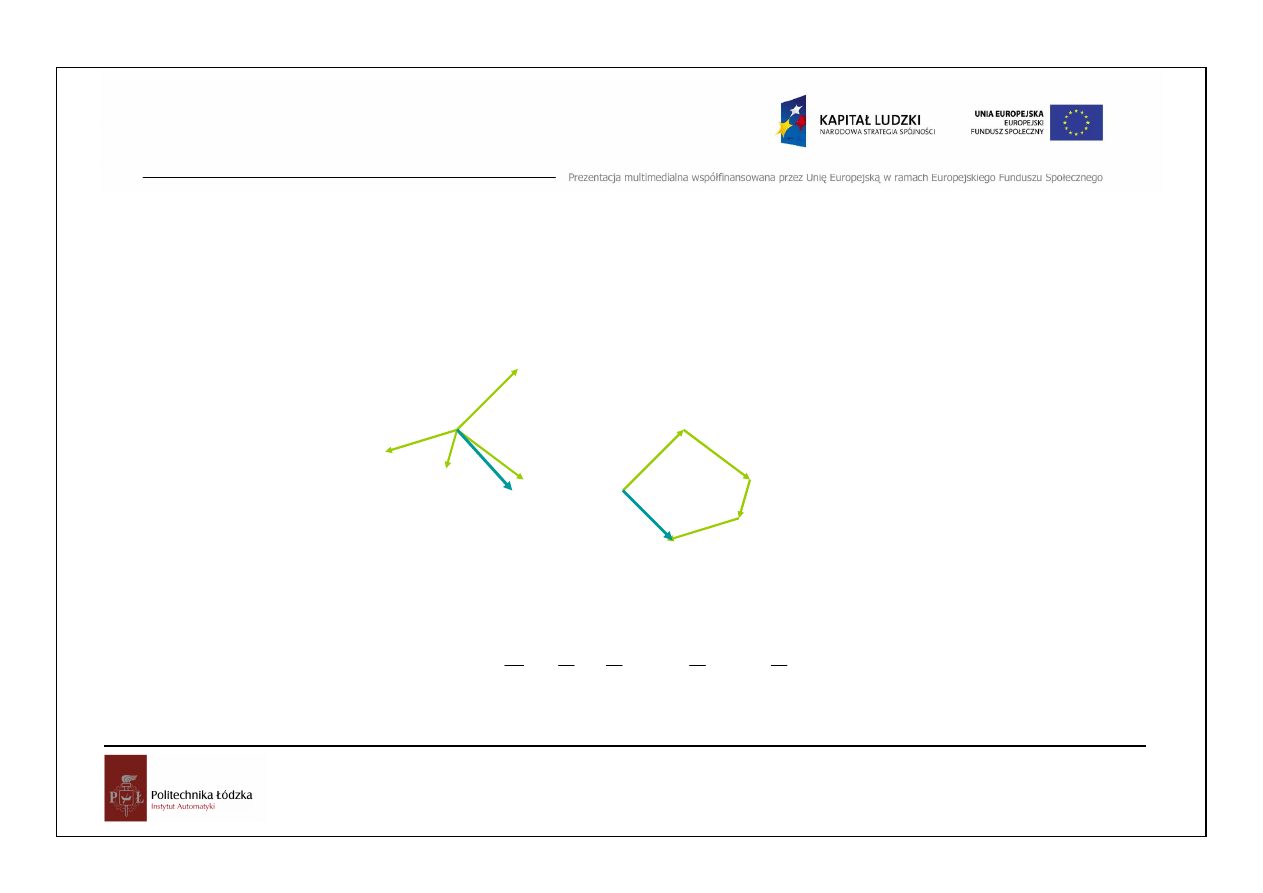
Dowolny płaski układ sił zbie
ż
nych przyło
ż
onych w punkcie
O mo
ż
emy zast
ą
pi
ć
sił
ą
wypadkow
ą
R równ
ą
sumie
geometrycznej ( wektorowej ) tych sił i przyło
ż
on
ą
równie
ż
w punkcie O.
Wypadkowa R „zamyka” wielobok sił.
P
2
P
n
R
O
R
P
P
P
P
n
i
i
n
= + + + =
=
∑
1
2
1
...
5
Mechanika i …
Twierdzenie o trzech siłach
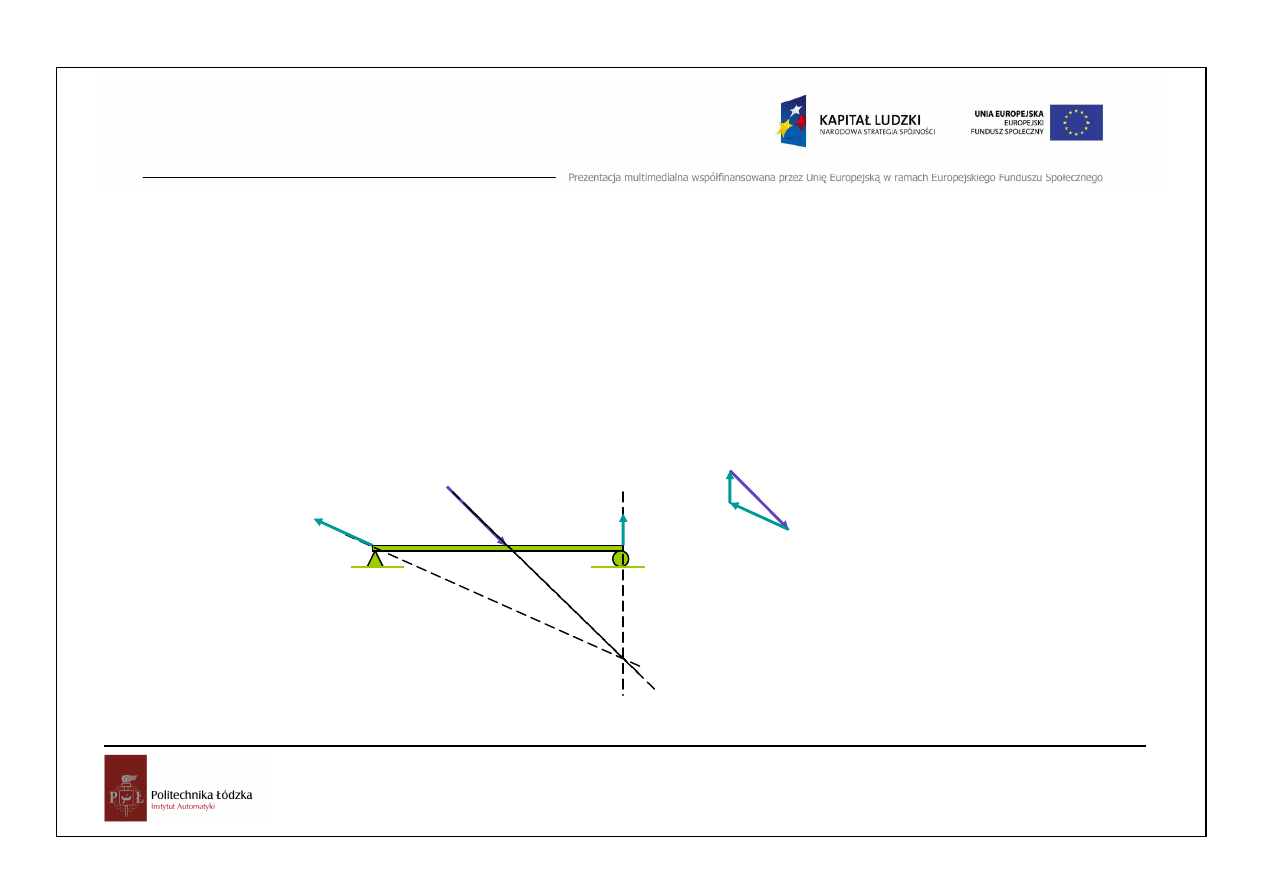
Ab y trzy siły nierównoległe
działaj
ą
ce
na
ciało
sztywne
był y w
równowadze, linie działania tych sił musz
ą
przecina
ć
si
ę
w jednym
punkcie, a same siły musz
ą
tworzy
ć
trójk
ą
t zamkni
ę
ty.
P
R
1
R
2
6
Mechanika i …
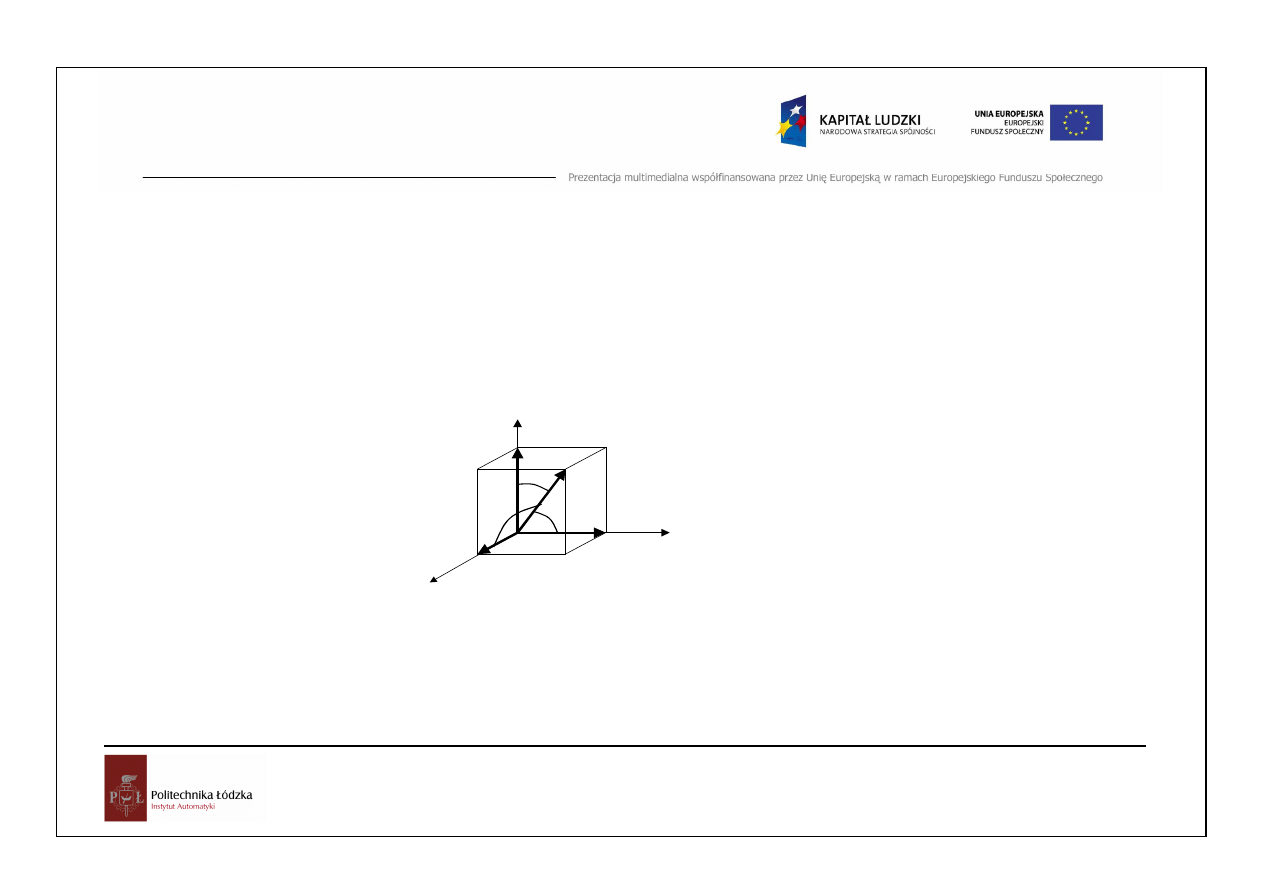
Zasady rzutowania w przestrzeni
P
i
P
ix
P
iz
P
iy
z
x
y
α
αα
α
i
ββββ
i
γγγγ
i
i
i
ix
P
P
α
cos
⋅
=
,
i
i
iy
P
P
β
cos
⋅
=
,
i
i
iz
P
P
γ
cos
⋅
=
7
Mechanika i …
Równania równowagi płaskiego układu sił zbie
ż
nych
wyra
ż
one w ich składowych:
Aby siły zbie
ż
ne le
żą
ce w jednej płaszczy
ż
nie były w równowadze, sumy rzutów tych sił na osie
układu współrz
ę
dnych musz
ą
by
ć
równe zeru.
0
0
1
1
=
=
∑
∑
=
=
n
i
iy
n
i
ix
P
P
8
Mechanika i …
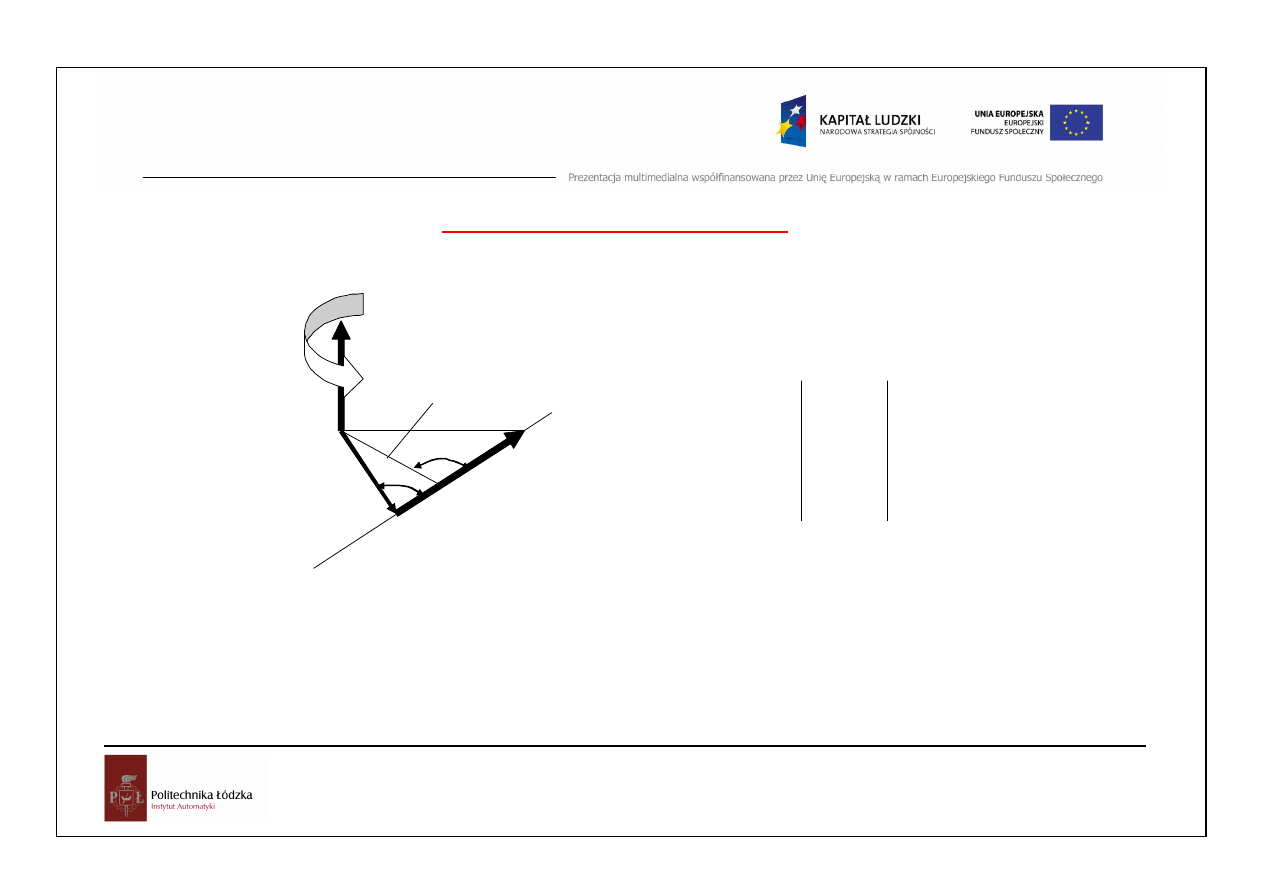
Moment siły wzgl
ę
dem punktu
Moment siły P wzgl
ę
dem punktu O jest iloczynem wektorowym promienia wektora r oraz siły
P.
.
O
P
M=
P
r sin
α
h=r
⋅
sin
α
α
M=
r
××××
P
r
A
B
z
y
x
z
y
x
P
P
P
r
r
r
k
j
i
P
r
M
r
r
r
r
r
r
=
×
=
9
Mechanika i …
Wypadkowa sił równoległych
P
1
P
2
R
r
1
r
2
2
2
1
1
2
1
r
P
r
P
P
P
R
=
+
=
P
1
P
2
r
1
r
2
2
2
1
1
r
P
r
P
=
Praw o d
ź
wigni:
10
Mechanika i …
Wypadkowa sił anty-równoległych
P
1
P
2
R
r
1
r
2
2
2
1
1
2
1
r
P
r
P
P
P
R
=
−
=

11
Mechanika i …
Para sił – szczególny przypadek sił anty-
równoległych
1
1
2
2
1
;
;
0
a
r
r
r
P
r
P
P
P
R
+
=
=
=
−
=
P
P
R=0
r
1
r
2
a
→∝
1
r
Wypadkowa pary sił nie istnieje!
Moment pary sił M=Pa
Moment pary sił nie zale
ż
y od punktu, wzgl
ę
dem którego
obliczamy momenty obu sił.
12
Mechanika i …
Dowolny płaski układ sił
x
y
P
1
P
2
P
3
P
i
P
n
O
∑
=
i
i
P
R
r
r
13
Mechanika i …
Redukcja siły P
i
do dowolnego punktu O
h
i
O
P
i
P
ix
= P
i
cos
α
i
P
iy
=P
i
sin
α
i
α
i
h
i
O
P
i
P
i
P
ix
= P
i
cos
α
i
P
iy
=P
i
sin
α
i
α
i
i
i
P
h
M
×
=
-P
i
Prze suwaj
ą
c równolegle wektor P
i
do punktu O przykładamy do tego punktu
zerowy u kład sił (
±
Pi), wówcza s siły oznaczone liniami przerywanymi tworz
ą
moment pary sił
M
i
=P
i
⋅
h
i
wzgl
ę
dem punktu O. Działanie to mo
ż
emy powtórzy
ć
dla ka
ż
dej siły Pi działaj
ą
cej na ciało sztywne
.
14
Mechanika i …
Redukcja układu sił do wektora głównego
i momentu głównego
∑
=
=
n
i
iA
M
M
1
v
r
h
R
O
R
R
R
x
= Rcos
α
R
y
=Rsin
α
α
R
h
M
R
×
=
R
A
h
R
O
R
R
h
M
R
×
=
A
15
Mechanika i …
Warunki równowagi dowolnego płaskiego układu
sił
x
y
P
1
P
2
P
3
P
i
P
n
O
0
=
=
∑
i
i
P
R
r
r
0
1
=
=
∑
=
n
i
iA
M
M
v
r
∑
=
=
n
i
ix
P
1
0
∑
=
=
n
i
iy
P
1
0
0
1
=
∑
=
n
i
iA
M
Warun ki równowagi w postaci skalarnej:
Aby dowolny płaski układ sił
znajdował si
ę
w równowadze
zarówno wektor główny R jak i
moment główny M musz
ą
by
ć
równe zeru.
Wyszukiwarka
Podobne podstrony:
kotelko 5 6 M5 6 id 248910 Nieznany
kotelko 1 2 M1 2 id 248905 Nieznany
M3 2 4 id 275168 Nieznany
protokol m3 id 402746 Nieznany
M3 id 275133 Nieznany
m3 3 id 275136 Nieznany
kotelko 4 M4 id 248909 Nieznany
kotelko 5 6 M5 6 id 248910 Nieznany
kotelko 10 WM 5 id 248906 Nieznany
M3 T1 probny Pytania 1 id 76238 Nieznany
Abolicja podatkowa id 50334 Nieznany (2)
4 LIDER MENEDZER id 37733 Nieznany (2)
katechezy MB id 233498 Nieznany
metro sciaga id 296943 Nieznany
perf id 354744 Nieznany
interbase id 92028 Nieznany
Mbaku id 289860 Nieznany
Probiotyki antybiotyki id 66316 Nieznany
miedziowanie cz 2 id 113259 Nieznany
więcej podobnych podstron