
Instytut
Spawalnictwa
w Gliwicach
KURS MIĘDZYNARODOWEGO
INŻYNIERA / TECHNOLOGA / MISTRZA / INSTRUKTORA SPAWALNIKA
(IWE/IWT/IWS/IWP)
Podstawy teorii
układów konstrukcji
3.1
opracował:
dr inż. Piotr Sędek
Nowelizacja materiału: 01. 2012 r.

2
1. Siły jako oddziaływania mechaniczne
Z oddziaływaniem mechanicznym najpro
ś
ciej jest zwi
ą
za
ć
poj
ę
cie siły. Siła jest
miar
ą
oddziaływa
ń
(mechanicznych) działaj
ą
cych na ciało. Im wi
ę
ksze oddziaływanie
(czyli wi
ę
ksza siła) tym wi
ę
ksze wywołuje ono skutki – mocniej przyspiesza (lub
zwalnia ciało), silniej go odkształca. Trzecia zasada dynamiki Newtona mówi o wza-
jemno
ś
ci oddziaływa
ń
. Jest ona cz
ę
sto nazywana zasad
ą
akcji i reakcji. Sformuło-
wanie III zasady dynamiki:
Je
ż
eli ciało A działa na ciało B sił
ą
F
AB
, to ciało B działa na ciało A sił
ą
F
BA
, o taki,
samym kierunku i warto
ś
ci jak F
AB
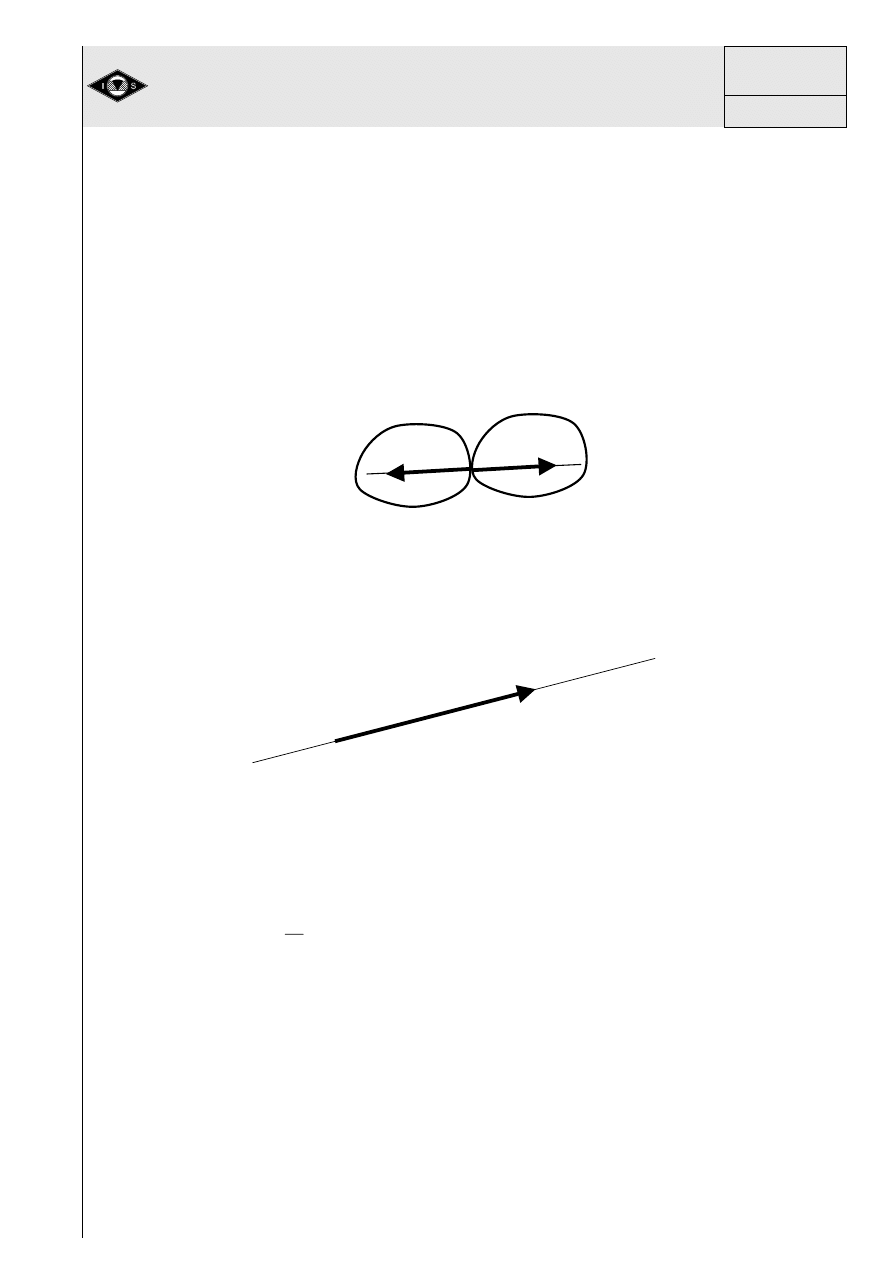
, ale przeciwnym zwrocie (rys. 1 ) .
Rys. 1 Siła jako oddziaływanie mechaniczne
Poj
ę
cie siły nierozerwalnie ł
ą
czy si
ę
z wektorem, który jest okre
ś
lony jako tzw. odci-
nek skierowany i jest graficznym odzwierciedleniem siły. Posiada on nast
ę
puj
ą
ce ce-
chy: kierunek, zwrot i warto
ść
. Na rys.2 pokazano wektor siły i okre
ś
lono jego cechy.
Rys.2 Wektor jako graficzne przedstawienie siły
Kierunek wektora okre
ś
la linia prosta, wzdłu
ż
której on działa, zwrot okre
ś
lony jest
poło
ż
eniem grota strzałki, a warto
ść
długo
ś
ci
ą
odcinka wyra
ż
on
ą
jednostkami siły
odniesionymi do jednostek długo
ś
ci np. 1 cm = 1kN.
Jednostkami siły s
ą
N (niuton), kN (kiloniuton), rzadziej MN (meganiuton). Wg defini-
cji , siła
2
1
1
1
s
m
kg
N
=
co oznacza,
ż
e siła jednego niutona wyst
ą
pi wtedy, kiedy masie
1 kg nada si
ę
przyspieszenie 1 m/s
2
.
1.1 Sumowanie i odejmowanie sił
Wektorowe przedstawianie sił umo
ż
liwia szereg działa
ń
takich jak: sumowanie
(składanie) i rozkład. W wyniku sumowania si
ę
sił otrzymujemy sił
ę
wypadkow
ą
, a
wyniku rozkładania otrzymuje si
ę
siły składowe. Na rys.3 pokazano podstawowe
działania na siłach jako wektorach. Z wielko
ś
ciami wektorowymi nierozerwalnie zwi
ą
-
zane jest poj
ę
cie układu współrz
ę
dnych. Prostok
ą
tny układ współrz
ę
dnych umo
ż
liwia
w sposób analityczny zorientowanie na płaszczy
ź
nie lub w przestrzeni odcinka wek-
tora. Ułatwia prowadzenie działa
ń
na wektorach. Na rys.3 pokazano przykłady dzia-
ła
ń
graficznych i analitycznych prowadzonych na wektorach.
A
B
AB
F
r
BA
F
r
l
F
r
Opracowanie Instytut Spawalnictwa - Gliwice.
Wszelkie prawa zastrze
żone. Powielanie lub rozpowszechnianie ca
ło
ści wzgl
ędnie
fragmentu w jakiejkolwiek formie i w jakikolwiek sposób jest zabronione.
KURS MIĘDZYNARODOWEGO
INŻYNIERA / TECHNOLOGA / MISTRZA / INSTRUKTORA SPAWALNIKA
(IWE/IWT/IWS/IWP)
Podstawy teorii układów konstrukcji
3.1
Instytut
Spawalnictwa
w Gliwicach
AW 1
3
Sumowanie sił
Układ zbie
ż
ny
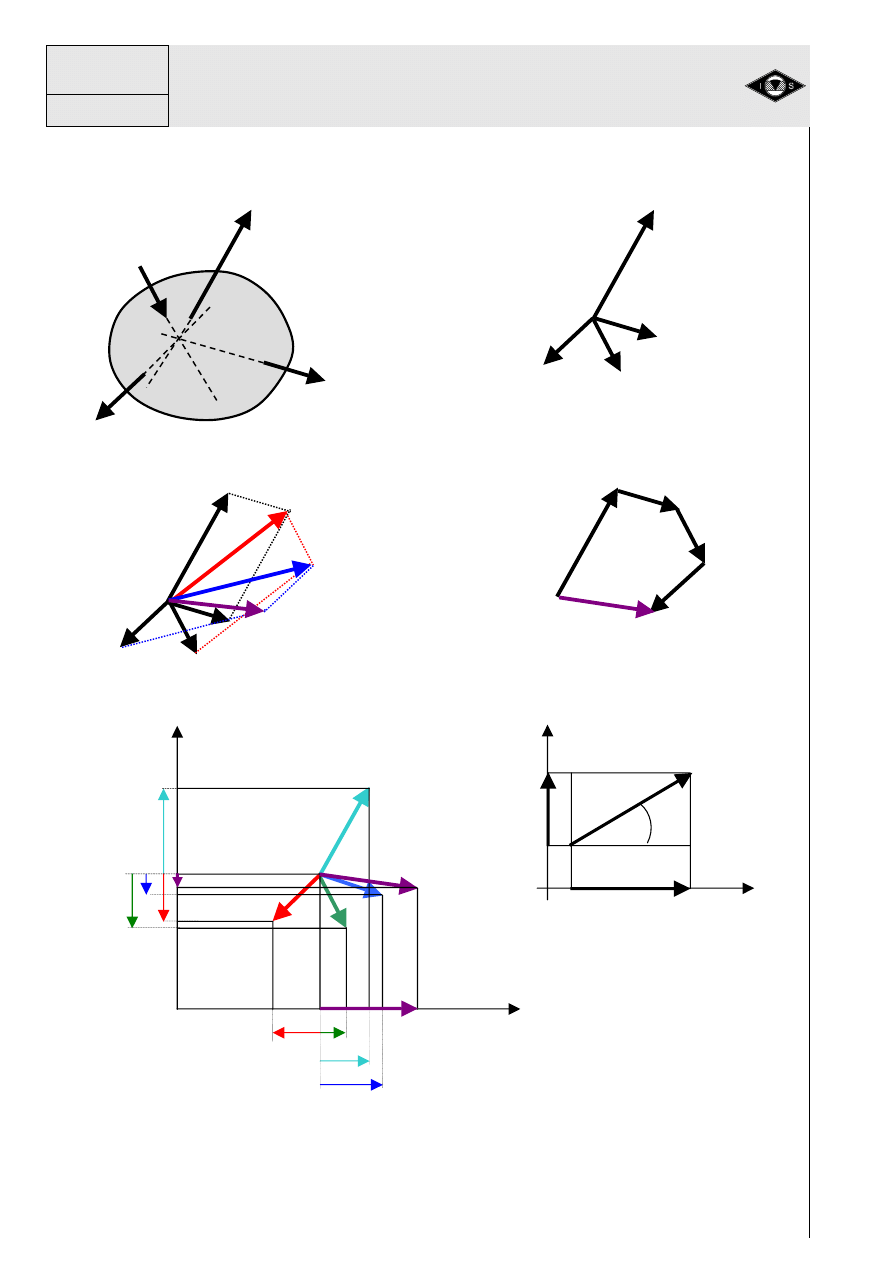
Rys.3. Sposoby składania sił (wektorów)
Na rys.3 na przykładzie układu zbie
ż
nego sił pokazano ró
ż
ne rodzaje działa
ń
na si-
łach a
ś
ci
ś
lej na wektorach. I tak na rys.3a układ sił zbie
ż
nych działa na ciało sztyw-
ne; ka
ż
da z sił działa wzdłu
ż
prostej (kierunku). Na rys.3b pokazano schemat sił w
Siły zbie
ż
ne działaj
ą
ce na
ciało sztywne
Schemat sił zbie
ż
nych
Składanie sił metod
ą
równoległoboku
Składanie sił metod
ą
wieloboku
P
1
P
2
P
3
O
P
4
P
123
P
1
P
2
P
12
O
R=P
1234
O
P
1
P
2
P
3
P
4
R
Składanie sił metod
ą
analityczn
ą
rzuto-
wania w układzie współrz
ę
dnych pro-
stok
ą
tnych
a)
P
1
P
2
P
3
P
4
O
b)
c)
d)
y
x
P
2x
P
3y
P
1
P
2
P
3
P
i
0
P
1y
P
2y
P
iy
P
1x
P
ix
P
3x
R
e)
R
y
R
x
y
x
α
P
r
x
P
r
y
P
r
f)
Opracowanie Instytut Spawalnictwa - Gliwice.
Wszelkie prawa zastrze
żone. Powielanie lub rozpowszechnianie ca
ło
ści wzgl
ędnie
fragmentu w jakiejkolwiek formie i w jakikolwiek sposób jest zabronione.
KURS MIĘDZYNARODOWEGO
INŻYNIERA / TECHNOLOGA / MISTRZA / INSTRUKTORA SPAWALNIKA
(IWE/IWT/IWS/IWP)
Podstawy teorii układów konstrukcji
Instytut
Spawalnictwa
w Gliwicach
3.1
AW 2
4
układzie zbie
ż
nym przecinaj
ą
cych si
ę
w jednym punkcie. Układ sił, w tym układ sił
zbie
ż
nych mo
ż
na zast
ą
pi
ć
jedn
ą
sił
ą
wypadkow
ą
R, która jest rezultatem sumowania
wektorowego. Jednym ze sposobów jest składanie sił metod
ą
równoległoboku, któ-
rego przykład podano na rys. 3c. Zasada polega na tym,
ż
e do danej pierwszej siły w
układzie dodaje si
ę
nast
ę
pn
ą
składaj
ą
c je w postaci równoległoboku np. P
1
+ P
2
.
Suma wektorowa P
12
jest wektorem – odcinkiem (przek
ą
tna równoległoboku) prze-
biegaj
ą
cym od punktu przeci
ę
cia si
ę
składanych sił do wierzchołka utworzonego
przez przeci
ę
cie si
ę
odcinków równoległych do składanych sił
(boków równoległo-
boku). Nale
ż
y przestrzega
ć
zasady,
ż
e długo
ś
ci odcinków musz
ą
by
ć
proporcjonalne
do warto
ś
ci sił i kierunki działania sił musz
ą
by
ć
niezmienne podczas konstruowania
równoległoboku. Najbardziej rozpowszechnion
ą
metod
ą
składania sił przedstawio-
nych w postaci wektorów jest metoda analityczna. Jest wygodna poniewa
ż
nie wy-
maga tworzenia precyzyjnych konstrukcji geometrycznych, które w rzeczywisto
ś
ci
obarczone s
ą
znacznym bł
ę
dem. Przedstawiona j
ą
na rys. 3e. Przykładowo dla
uproszczenia posłu
ż
ono si
ę
płaszczyzn
ą
, na której rozmieszczone s
ą
siły P
1
… P
i
.
Naszym zadaniem jest wyznaczenie siły wypadkowej R, która b
ę
dzie sum
ą
wektoro-
w
ą
sił podanych sił składowych.
i
P
P
P
P
R
r
L
r
r
r
r
3
2
1
+
+
=
(1)
Przestrze
ń
, a wła
ś
ciwie w naszym przypadku płaszczyzna zdefiniowana b
ę
dzie ukła-
dem współrz
ę
dnych prostok
ą
tnych, przy pomocy którego mo
ż
na posługiwa
ć
si
ę
po-
j
ę
ciem rzutu na osie tego układu. Wszystkie siły składowe jako kategorie geome-
tryczne mog
ą
w układzie współrz
ę
dnych podlega
ć
wszystkim zasadom geometrii i
trygonometrii. I tak ka
ż
da z sił (wektorów) b
ę
dzie tworzy
ć
na osiach rzuty (rys.3f),
które b
ę
d
ą
podlega
ć
zasadom sumowania wektorowego (rys. 3f).
y
x
P
P
P
r
r
r
++++
====
(2)
Wykorzystuj
ą
c zasady trygonometrii mo
ż
emy przedstawi
ć
rzuty w postaciach:
αααα
cos
P
P
x
====
r
i
αααα
sin
P
P
y
====
r
(3)
Z twierdzenia Pitagorasa mo
ż
na okre
ś
li
ć
zale
ż
no
ść
pomi
ę
dzy wymiarami rzutów:
2
2
y
x
P
P
P
r
r
++++
====
(4)
Sumowanie analityczne b
ę
dzie zatem polega
ć
na wyznaczeniu analitycznym warto-
ś
ci poszczególnych rzutów na obie osie współrz
ę
dnych. Po ich algebraicznym zsu-
mowaniu z uwzgl
ę
dnieniem znaków (zwrotów) otrzymamy warto
ś
ci rzutów siły wy-
padkowej na obie osie współrz
ę
dnych.
∑
∑
∑
∑
====
====
i
i
ix
x
P
R
1
∑
∑
∑
∑
====
====
i
i
iy
y
P
R
1
-
rzuty wypadkowej
(5)
2
2
y
x
R
R
R
++++
====
-
długo
ść
(warto
ść
wypadkowej)
(6)
αααα
====
x
y
R
R
tg
arc
- k
ą
t orientacji do osi x
(7)
Analityczna zasada sumowania sił (wektorów nie dotyczy tylko układu zbie
ż
nego sił.
Mo
ż
na j
ą
wykorzystywa
ć
równie
ż
w przypadku rozpatrywania układów dowolnych,
przy wyznaczaniu warunków równowagi sił. Zasada ta jest równie
ż
stosowana przy
rozpatrywaniu układów przestrzennych. W celu uproszczenia przedstawiono j
ą
dla
przypadku układu płaskiego (dwuwymiarowego). Siły mo
ż
na równie
ż
odejmowa
ć
.
Polega to na tym,
ż
e wektor odjemnika dodaje si
ę
do wektora z przeciwnym zwrotem
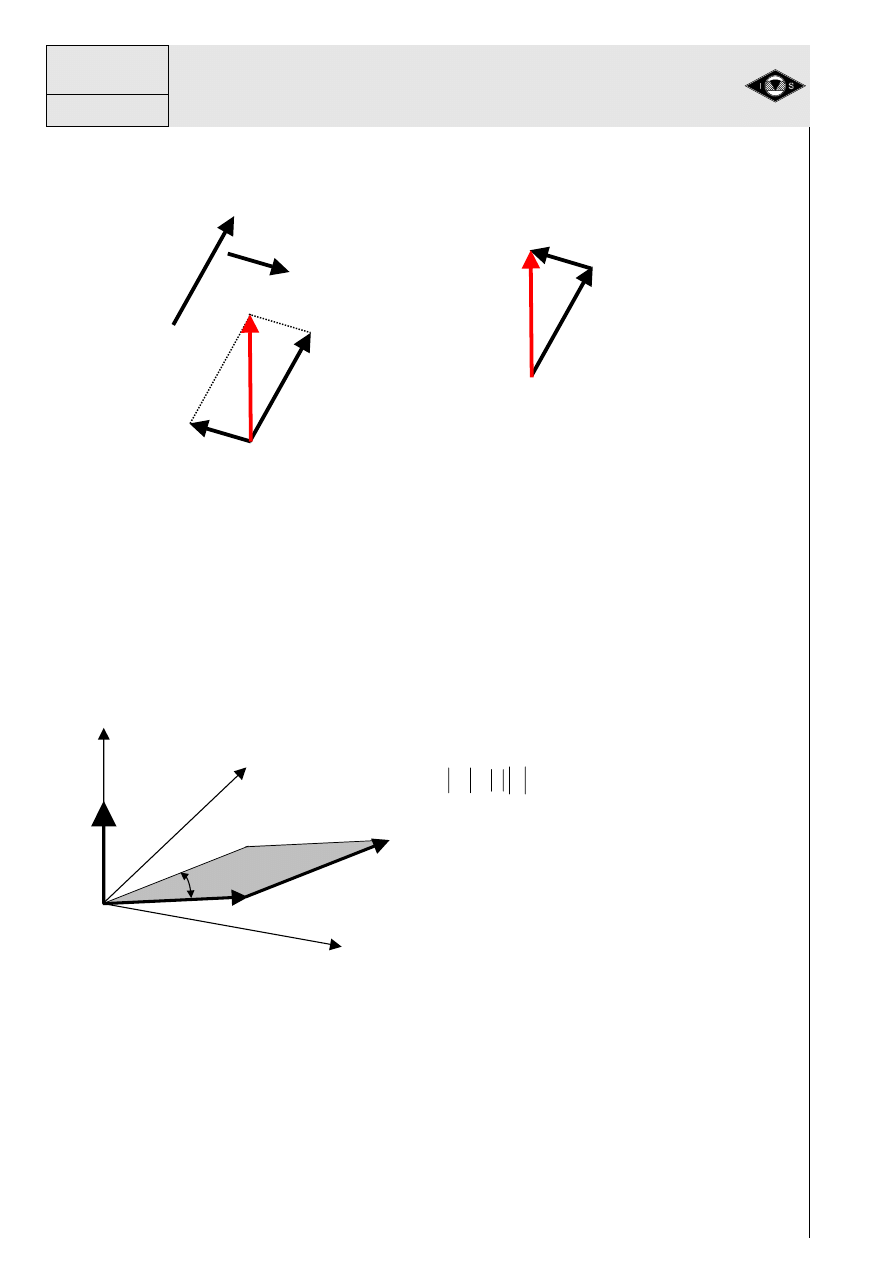
(rys. 4).
Opracowanie Instytut Spawalnictwa - Gliwice.
Wszelkie prawa zastrze
żone. Powielanie lub rozpowszechnianie ca
ło
ści wzgl
ędnie
fragmentu w jakiejkolwiek formie i w jakikolwiek sposób jest zabronione.
KURS MIĘDZYNARODOWEGO
INŻYNIERA / TECHNOLOGA / MISTRZA / INSTRUKTORA SPAWALNIKA
(IWE/IWT/IWS/IWP)
Podstawy teorii układów konstrukcji
3.1
Instytut
Spawalnictwa
w Gliwicach
AW 3
5
Rys.4 Odejmowanie sił
a) Metod
ą
równoległoboku
b) Metod
ą
wieloboku
1.2 Moment siły
W statyce oprócz sił wyst
ę
puje jeszcze poj
ę
cie momentu siły. Moment siły zdefi-
niowany jest wraz z ramieniem na jakim ta siła oddziaływuje oraz punktem O - biegu-
nem. Moment siły wzgl
ę
dem bieguna O na ramieniu r jest iloczynem wektorowym
wektora siły przez wektor ramienia.
P
r
M
r
r
r
××××
====
(8)
Graficznie iloczyn wektorowy przedstawiono na rys.5.
(9)
Rys. 5 Konstrukcja wektora momentu
Wektor moment skierowany jest prostopadle do płaszczyzny xy, na której le
ż
a wekto-
ry ramienia i siły. Warto
ść
– jego długo
ść
, jest równa powierzchni równoległoboku
okre
ś
lonego wektorami r i P (rys.5). Warto
ść
momentu mo
ż
na wyznaczy
ć
w sposób
analityczny. Przedstawiono to na rys.6
y
x
r
r
P
r
M
r
z
α
αααα
sin
P
r
M
r
r
v
====
Zwrot wektora momentu okre
ś
la reguła
ś
ruby o
gwincie prawoskr
ę
tnym. Je
ś
li na płaszczy
ź
nie
wyznaczonej przez r i P, siła P powoduje obrót
przeciwnie do kierunku wskazówek zegara to ob-
racaj
ą
c
ś
rub
ę
o osi prostopadłej do tej płaszczy-
zny powoduje jej „wykr
ę
canie”. Kierunek prze-
suwania si
ę
ś
ruby okre
ś
la zwrot wektora.
P
1
P
2
P
12
= P
1
– P
2
O
P
1
- P
2
O
P
1
P
2
P
12
= P
1
– P
2
a)
b)
Opracowanie Instytut Spawalnictwa - Gliwice.
Wszelkie prawa zastrze
żone. Powielanie lub rozpowszechnianie ca
ło
ści wzgl
ędnie
fragmentu w jakiejkolwiek formie i w jakikolwiek sposób jest zabronione.
KURS MIĘDZYNARODOWEGO
INŻYNIERA / TECHNOLOGA / MISTRZA / INSTRUKTORA SPAWALNIKA
(IWE/IWT/IWS/IWP)
Podstawy teorii układów konstrukcji
Instytut
Spawalnictwa
w Gliwicach
3.1
AW 4
6
(10)
Rys.6 Wyznaczenie warto
ś
ci momentu w układzie współrz
ę
dnych.
1.3 Równowaga sił i momentów
Podstawowym warunkiem rozpatrywania zagadnie
ń
statyki jest równowaga
wszystkich sił działaj
ą
cych na układ. Siły czynne P
k
(oddziaływania i ci
ęż
ar własny)
oraz bierne R
l
(reakcje) musz
ą
si
ę
wzajemnie równowa
ż
y
ć
. Ka
ż
dy układ sił rozpa-
trywa
ć
nale
ż
y w układzie współrz
ę
dnych. Na rys.7 przedstawiono przykładowy układ
sił umieszczony w układzie współrz
ę
dnych. Nale
ż
y podkre
ś
li
ć
,
ż
e przy rozwi
ą
zywaniu
danego zagadnienia nale
ż
y zało
ż
y
ć
układ, którego nie mo
ż
na zmienia
ć
. Zastosowa-
nie układu współrz
ę
dnych umo
ż
liwia przeprowadzenie rzutowania sił wzgl
ę
dem osi
oraz wyznaczenia równowagi momentów wzgl
ę
dem ustalonych w tym układzie punk-
tów. Prawidłowo zało
ż
ony układ statyczny musi zapewni
ć
równowag
ę
sił czynnych i
biernych.
Warunek równowagi rzutów sił na o
ś
x
0
1
1
====
++++
∑
∑
∑
∑
∑
∑
∑
∑
====
====
m
l
lx
n
k
kx
R
P
(11)
Warunek równowagi rzutów sił na o
ś
y
0
1
1
====
++++
∑
∑
∑
∑
∑
∑
∑
∑
====
====
m
l
ly
n
k
ky
P
P
(12)
Warunek równowagi momentów wzgl.
obranego punktu B
(((( ))))
(((( ))))
0
1
1
====
++++
∑
∑
∑
∑
∑
∑
∑
∑
====
====
l
m
l
B
k
n
k
B
R
M
P
M
(13)
Rys.7 Warunki równowagi sił w układzie współrz
ę
dnych
2. Podpory i wi
ę
zy
Podpory oraz wi
ę
zy słu
żą
do utrzymania układu sztywnego w bezruchu; s
ą
zatem
miejscami przyło
ż
enia sił biernych. Prawidłowe zało
ż
enie podpory jest jednym z
czynników tworzeniu modelu statycznego. Od tego zale
ż
y prawidłowe przedstawienie
rzeczywistego układu oddziaływa
ń
i reakcji. Najcz
ęś
ciej spotykane rodzaje podpór to
podpory kierunkowe i przegubowe. Podpory kierunkowe z definicji posiadaj
ą
znane
kierunki reakcji.
h
P
y
P
x
P
M
P
x
P
Y
o
====
−−−−
====
r
r
x
y
P
r
O
x
P
y
P
p
x
p
y
h
x
1
P
r
2
P
r
3
P
r
n
P
y
0
k
P
r
1
R
r
m
R
r
l
R
r
B
Opracowanie Instytut Spawalnictwa - Gliwice.
Wszelkie prawa zastrze
żone. Powielanie lub rozpowszechnianie ca
ło
ści wzgl
ędnie
fragmentu w jakiejkolwiek formie i w jakikolwiek sposób jest zabronione.
KURS MIĘDZYNARODOWEGO
INŻYNIERA / TECHNOLOGA / MISTRZA / INSTRUKTORA SPAWALNIKA
(IWE/IWT/IWS/IWP)
Podstawy teorii układów konstrukcji
3.1
Instytut
Spawalnictwa
w Gliwicach
AW 5
7
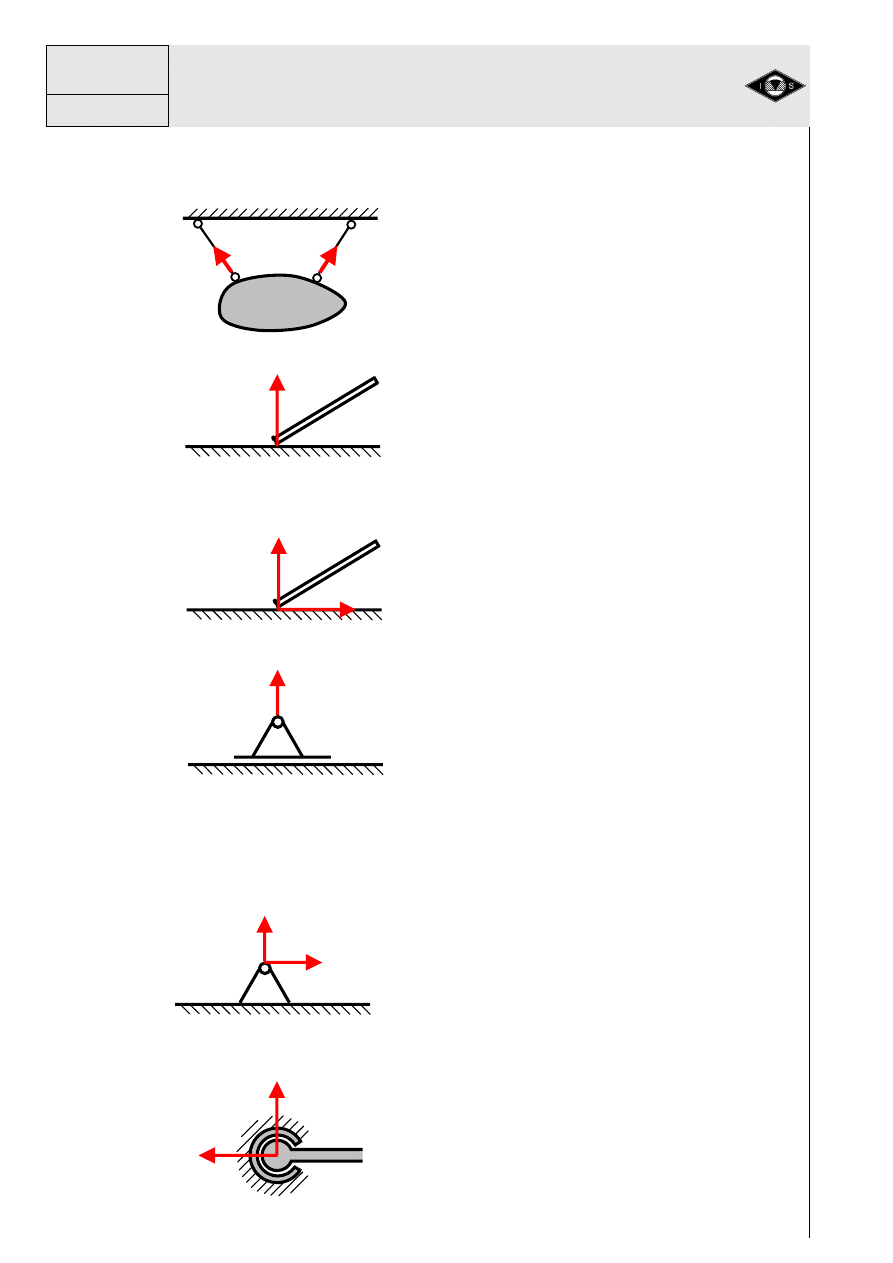
a)
Ci
ę
gna
b)
Podpory gładkie
c)
Podpora chropowata (z tarciem)
d)
Podpora przegubowa ruchoma
Rys. 8 Zbiór podpór kierunkowych
a)
Podpora przegubowa stała
b)
Przegub walcowy
1
S
r
2
S
r
Ci
ę
gnami s
ą
liny i ła
ń
cuchy. Kierunki działa-
nia reakcji s
ą
znane
R
Prosta działania reakcji jest prostopa-
dła do powierzchni
N
T
Wyst
ę
puj
ą
dwie reakcje o znanych kie-
runkach. Normalna do powierzchni N i
styczna siła tarcia T.
R
Wektor reakcji jest prostopadły do kie-
runku mo
ż
liwego ruchu.
y
R
x
R
Wektor reakcji a
ś
ci
ś
lej jego kierunek jest nie-
znany. Okre
ś
la si
ę
go po obliczeniu R
y
i R
x
x
R
y
R
Kierunek wektora reakcji jest nieznany .
Wynika z warto
ś
ci składowych R
x
i R
y
.
Opracowanie Instytut Spawalnictwa - Gliwice.
Wszelkie prawa zastrze
żone. Powielanie lub rozpowszechnianie ca
ło
ści wzgl
ędnie
fragmentu w jakiejkolwiek formie i w jakikolwiek sposób jest zabronione.
KURS MIĘDZYNARODOWEGO
INŻYNIERA / TECHNOLOGA / MISTRZA / INSTRUKTORA SPAWALNIKA
(IWE/IWT/IWS/IWP)
Podstawy teorii układów konstrukcji
Instytut
Spawalnictwa
w Gliwicach
3.1
AW 6
8
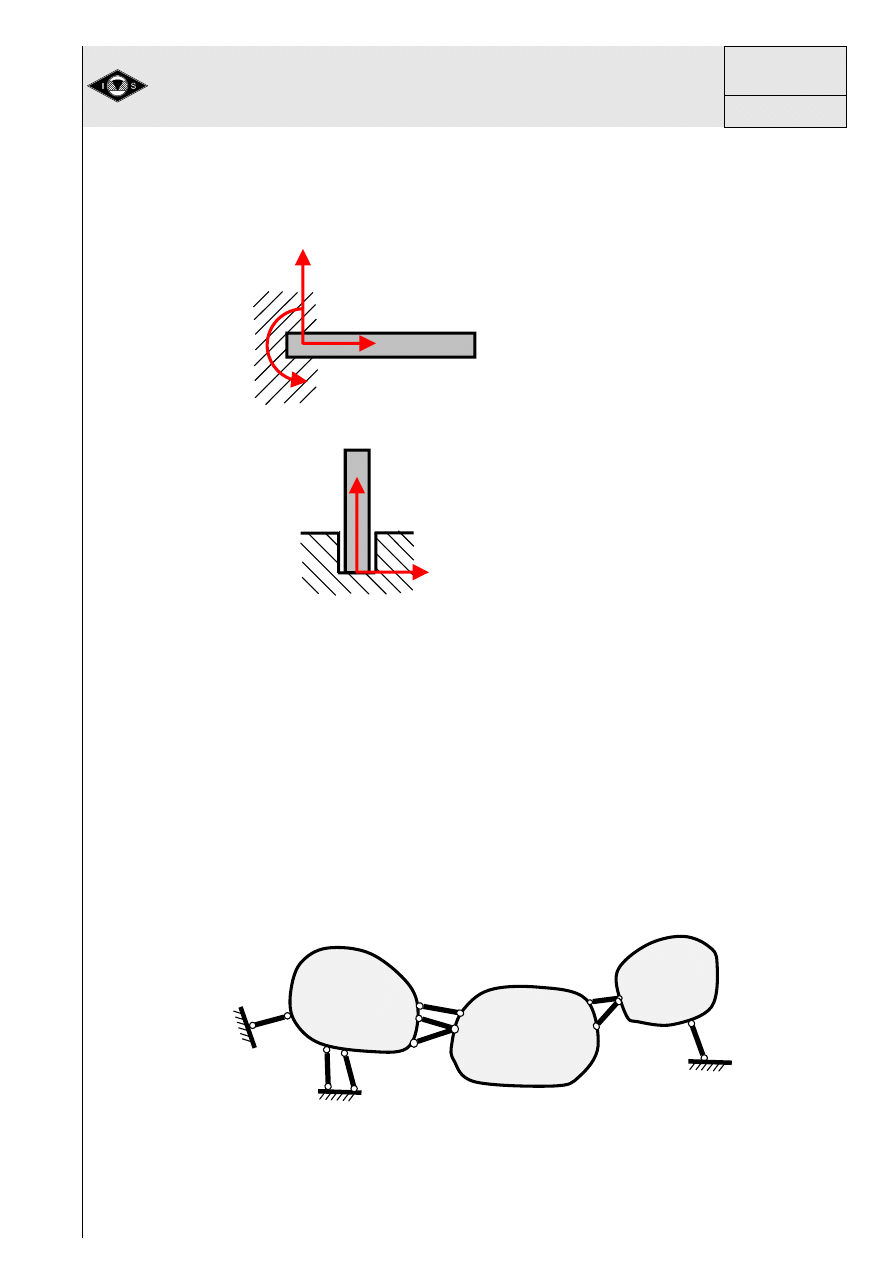
c)
Utwierdzenie
d)
Ło
ż
ysko stopowe
Rys. 9 Podpory przegubowe
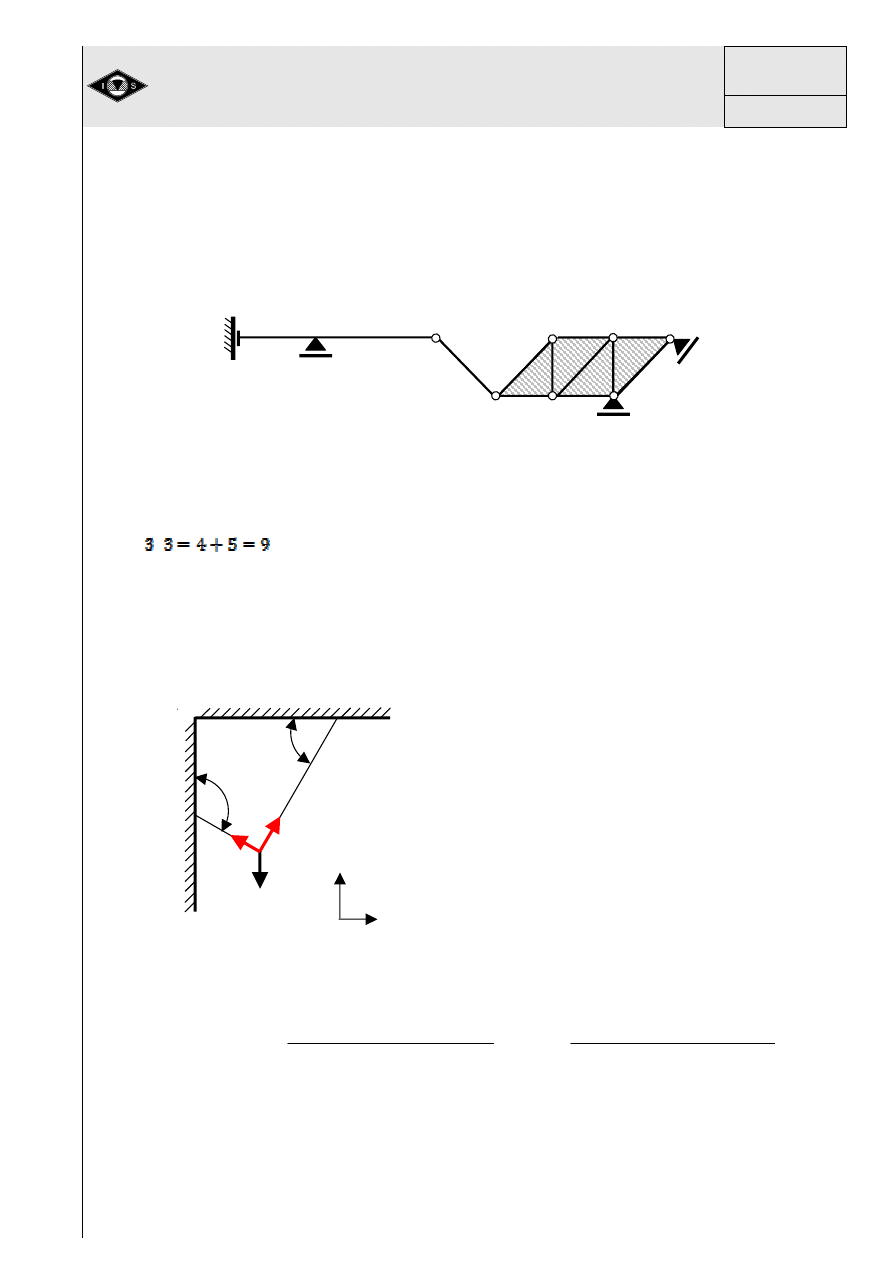
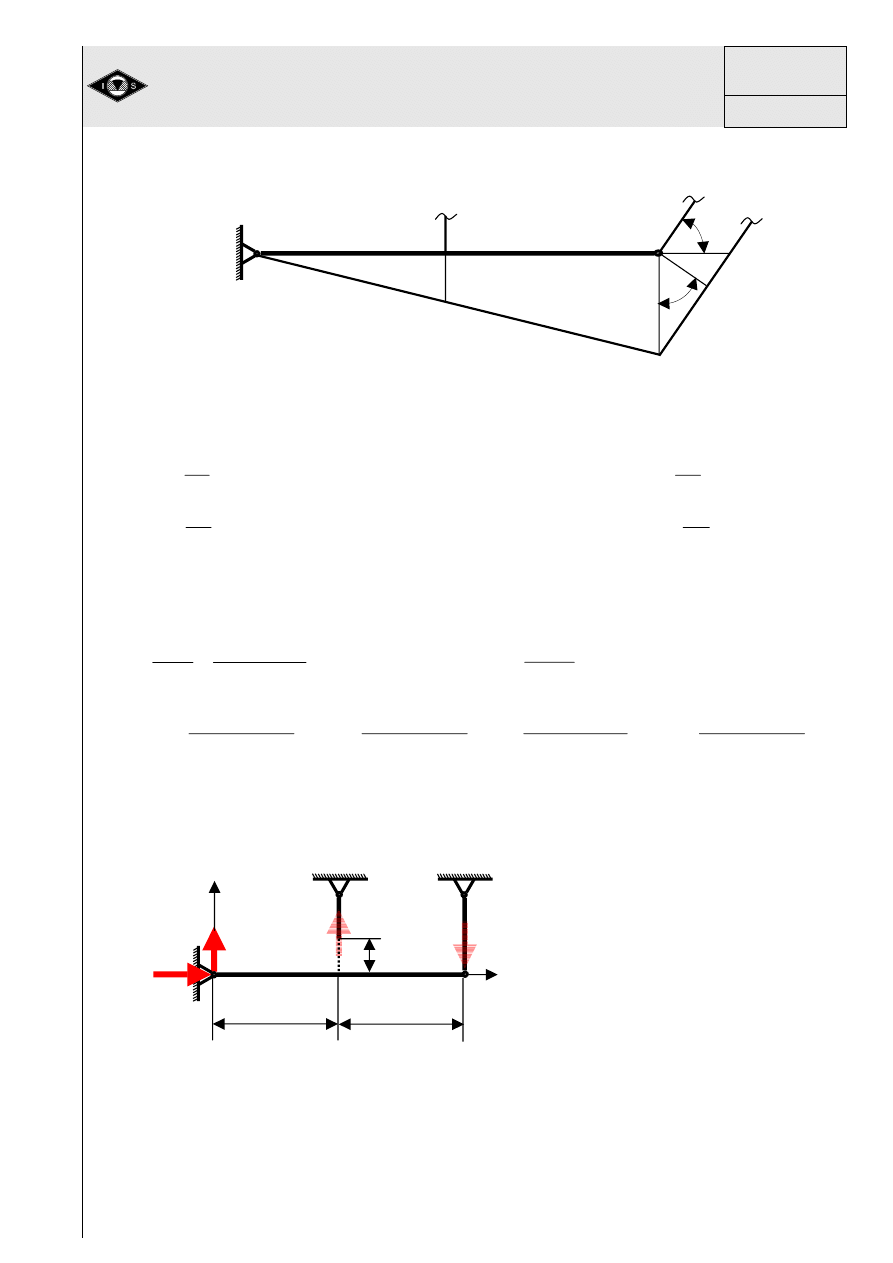
3. Geometryczna niezmienno
ść
układu
W układach statycznych cz
ę
sto wyst
ę
puj
ą
elementy materialne poł
ą
czone ze so-
b
ą
strukturami podatnymi posiadaj
ą
cymi mo
ż
liwo
ść
obrotu i przesuni
ę
cia. Cz
ę
sto s
ą
to przeguby. Aby spełni
ć
warunek równowagi statycznej musz
ą
by
ć
one nieruchome
wzgl
ę
dem ł
ą
czonych tych elementów. Aby unieruchomi
ć
elementy w układzie nale-
ż
y poł
ą
czy
ć
go z podło
ż
em trzema pr
ę
tami, nie przecinaj
ą
cymi si
ę
w jednym punkcie
i nierównoległymi. Je
ś
li do takiego systemu doł
ą
czymy nast
ę
pny element poł
ą
czony
równie
ż
trzema pr
ę
tami (tylko z poprzednim elementem albo z elementem i podło-
ż
em) nie przecinaj
ą
cymi si
ę
w jednym punkcie i nierównoległymi, to układ takich
elementów b
ę
dzie geometrycznie niezmienny (rys. 10). W ten sposób układ system
mo
ż
emy rozbudowa
ć
.
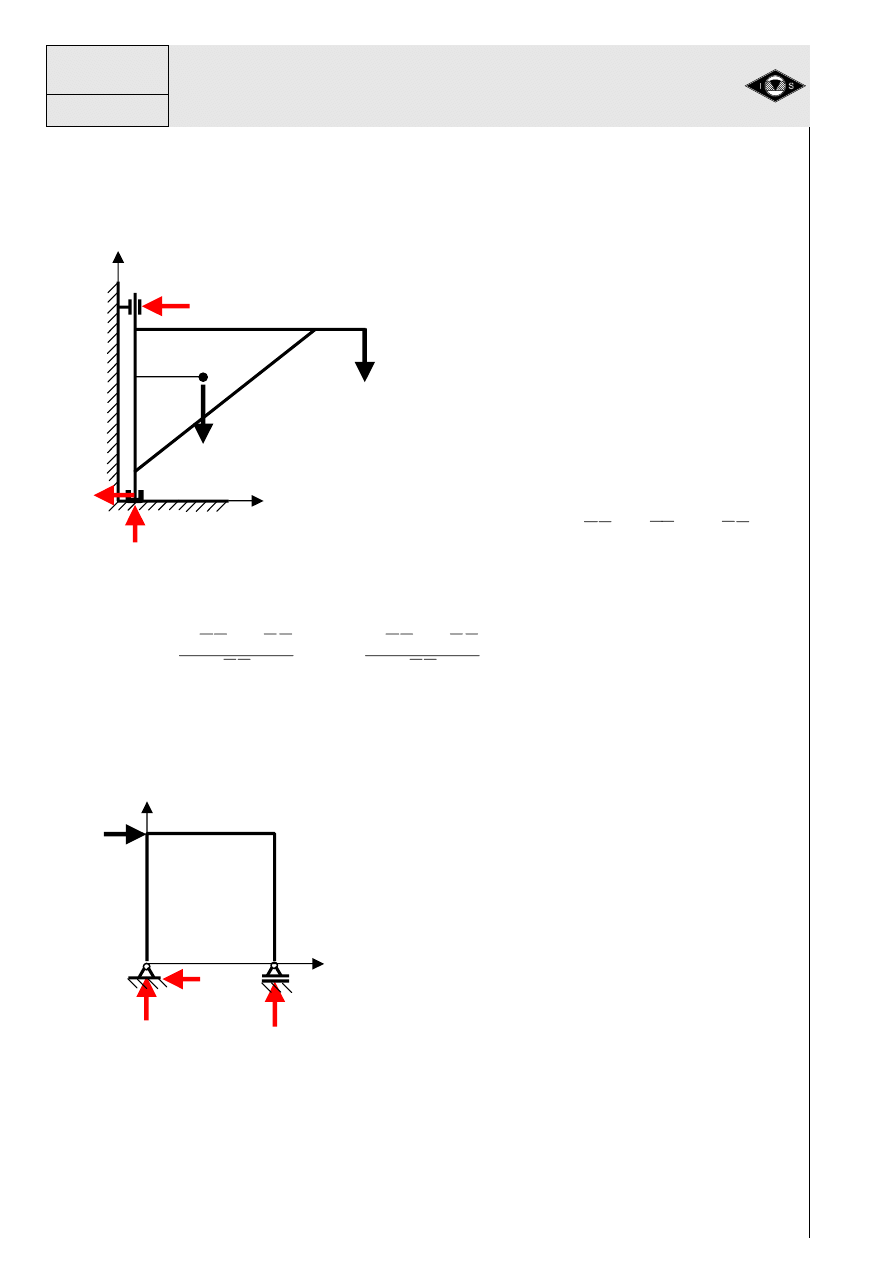
Rys. 10 Układ elementów niezmiennych geometrycznie
y
R
x
R
a
M
Kierunek wektora reakcji jest niezna-
ny. Wynika z warto
ś
ci składowych R
x
i
R
y.
. Dodatkowo wyst
ą
pi reakcja mo-
mentu M
a
.
x
R
y
R
Kierunek reakcji wyznaczaj
ą
warto
ś
ci
składowych R
y
i R
y
. Punkt zaczepienie
reakcji jest znany (styk słupa z podło
ż
em)
T-1
T-2
T-3
Opracowanie Instytut Spawalnictwa - Gliwice.
Wszelkie prawa zastrze
żone. Powielanie lub rozpowszechnianie ca
ło
ści wzgl
ędnie
fragmentu w jakiejkolwiek formie i w jakikolwiek sposób jest zabronione.
KURS MIĘDZYNARODOWEGO
INŻYNIERA / TECHNOLOGA / MISTRZA / INSTRUKTORA SPAWALNIKA
(IWE/IWT/IWS/IWP)
Podstawy teorii układów konstrukcji
3.1
Instytut
Spawalnictwa
w Gliwicach
AW 7
9
Poł
ą
czenie elementów T-2 i T-3 za pomoc
ą
dwóch pr
ę
tów nierównoległych mo
ż
na
traktowa
ć
jako przegub, natomiast poł
ą
czenie elementów T-1 i T-2 trzema pr
ę
tami
nierównoległymi i nie przecinaj
ą
cymi si
ę
w jednym punkcie jest poł
ą
czeniem sztyw-
nym. Bior
ą
c powy
ż
sze pod uwag
ę
, mo
ż
na wyprowadzi
ć
prosty wzór okre
ś
laj
ą
cy
geometryczn
ą
niezmienno
ść
układu konstrukcyjnego. Do unieruchomienia jednego
elementu potrzeba trzech pr
ę
tów ł
ą
cz
ą
cych go z podło
ż
em lub z podło
ż
em i z innym
elementem. Zatem w układzie geometrycznie niezmiennym liczba pr
ę
tów musi by
ć
równa trzykrotnej liczbie elementów. Je
ż
eli przez t oznaczymy liczb
ę
elementów, a
przez p liczb
ę
pr
ę
tów to mo
ż
emy napisa
ć
:
(14)
Spełnienie powy
ż
szego równania jest warunkiem koniecznym, ale nie wystarczaj
ą
-
cym geometrycznej niezmienno
ś
ci układu. Wystarczy bowiem w układzie na rysunku
powy
ż
ej usun
ąć
pr
ę
t ł
ą
cz
ą
cy element T-3 z podło
ż
em i przyło
ż
y
ć
go do elementu T-
2. Liczba pr
ę
tów i tarcz w układzie nie ulegnie zmianie, tak wi
ę
c równanie powy
ż
sze
b
ę
dzie spełnione, chocia
ż
układ b
ę
dzie geometrycznie zmienny (chwiejny). Tarcza T-
3 ma bowiem mo
ż
liwo
ść
obrotu w przegubie.
Buduj
ą
c pr
ę
towe układy konstrukcyjne np. kratownice, post
ę
powa
ć
b
ę
dziemy według
powy
ż
szych zasad, traktuj
ą
c ka
ż
dy pr
ę
t jak wspomniany element. Pami
ę
tamy rów-
nie
ż
o tym,
ż
e trzy pr
ę
ty nierównoległe i nie przecinaj
ą
ce si
ę
w jednym punkcie, pod-
pieraj
ą
ce belk
ę
na jej ko
ń
cu to utwierdzenie, podparcie belki dwoma przecinaj
ą
cymi
si
ę
pr
ę
tami to podpora przegubowa, a podparcie jednym pr
ę
tem - podpora przegu-
bowo przesuwna.
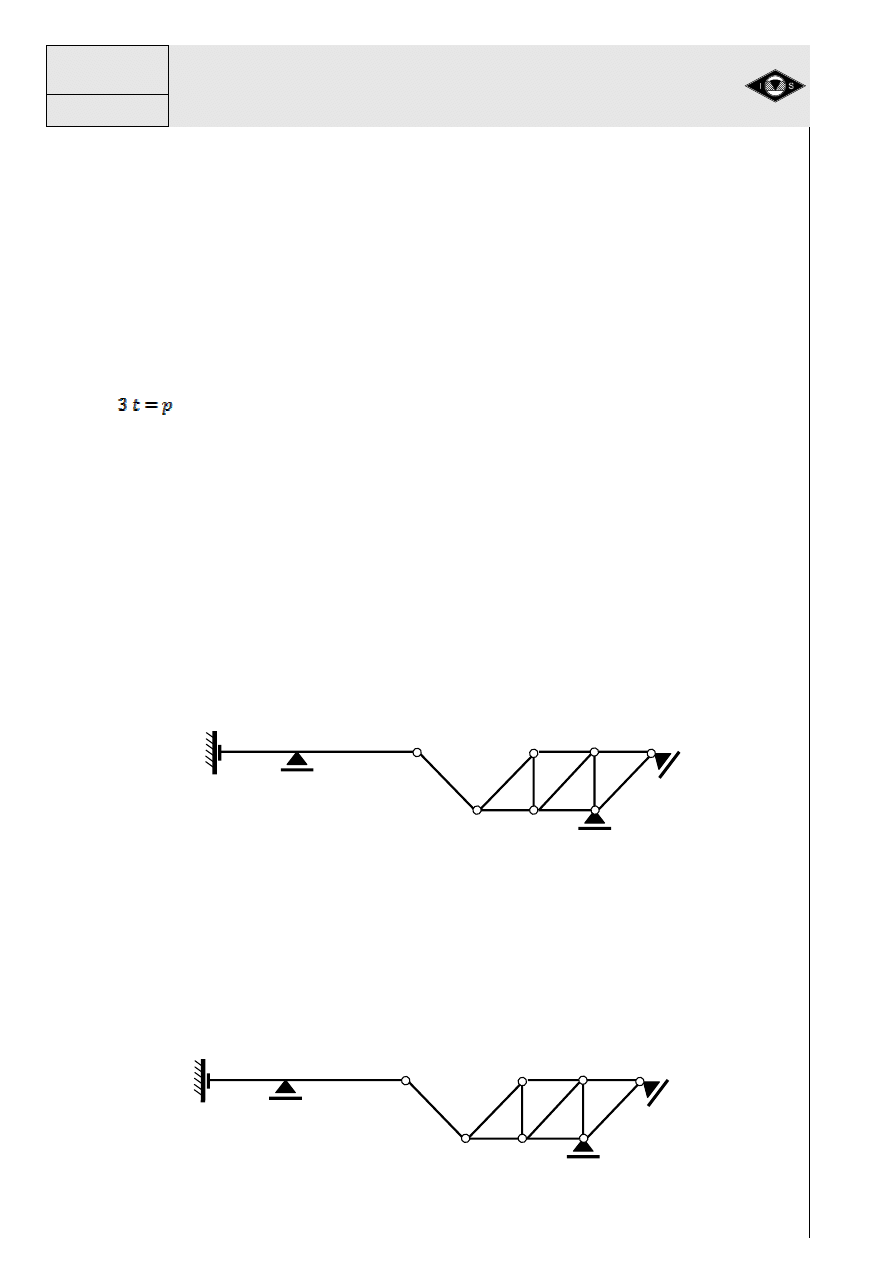
Przykład: Sprawdzi
ć
geometryczn
ą
niezmienno
ść
podanego układu pr
ę
towego (11).
Rys. 11 Układ pr
ę
towy
Ka
ż
d
ą
cz
ęść
układu oddzielon
ą
przegubami traktujemy jako tarcz
ę
(wspomniany ju
ż
element). Liczba tarcz wynosi zatem t = 11. Liczba pr
ę
tów, którymi mo
ż
emy zast
ą
pi
ć
podpory wynosi 2 + 3 = 5. Ka
ż
dy przegub w którym schodz
ą
si
ę
dwie tarcze zast
ę
pu-
jemy dwoma pr
ę
tami, je
ż
eli w przegubie schodzi si
ę
wi
ę
cej tarcz do dla ka
ż
dej tarczy
powy
ż
ej dwóch dodajemy dwa pr
ę
ty. Tak wi
ę
c w naszym układzie liczba pr
ę
tów, któ-
rymi zast
ę
pujemy przeguby jest nast
ę
puj
ą
ca: 2 + 4 + 6 + 4 + 2 + 6 + 4 = 28 (rys.12).
Mamy wi
ę
c: liczba pr
ę
tów 5 + 28 = 33 co jest równe liczbie tarcz pomno
ż
onej przez
trzy. Warunek konieczny geometrycznej niezmienno
ś
ci jest wi
ę
c spełniony.
Rys. 12 Analiza układu pr
ę
towego
2
1
1
1
2
2
4
4
4
6
6
Opracowanie Instytut Spawalnictwa - Gliwice.
Wszelkie prawa zastrze
żone. Powielanie lub rozpowszechnianie ca
ło
ści wzgl
ędnie
fragmentu w jakiejkolwiek formie i w jakikolwiek sposób jest zabronione.
KURS MIĘDZYNARODOWEGO
INŻYNIERA / TECHNOLOGA / MISTRZA / INSTRUKTORA SPAWALNIKA
(IWE/IWT/IWS/IWP)
Podstawy teorii układów konstrukcji
Instytut
Spawalnictwa
w Gliwicach
3.1
AW 8
10
Trzy pr
ę
ty nie przecinaj
ą
ce si
ę
w jednym punkcie i nierównoległe tworz
ą
układ geo-
metrycznie niezmienny. Je
ż
eli taki układ rozbudujemy, doł
ą
czaj
ą
c po dwa pr
ę
ty, tak
aby układ trójk
ą
tów był zachowany, to układ taki dalej b
ę
dzie geometrycznie nie-
zmienny. W ten sposób konstruuje si
ę
kratownice. Układ, b
ę
d
ą
cy kratownic
ą
, mo
ż
na
zatem traktowa
ć
jako jedn
ą
tarcz
ę
. Bior
ą
c to pod uwag
ę
do analizy naszego przykła-
du mo
ż
na by wzi
ąć
trzy tarcze, jak na rysunku poni
ż
ej.
Rys. 13 Układ pr
ę
towo tarczowy
Przy takim podziale równie
ż
spełniony jest warunek geometrycznej niezmienno
ś
ci wg
( 14 ):
4. Przykłady
Przykład 1
1)
Dane: Q,
α
,
β
Szukane: T
A
, T
C
Rozwi
ą
zanie:
Warunki równowagi:
Rzutów sił na o
ś
x:
Rzutów sił na o
ś
y:
Rys. 14 Układ ci
ę
gnowy
Wynik:
x
y
Q
T
A
T
C
A
C
β
α
B
∑
∑
∑
∑
====
====
i
i
ix
P
1
0
,
((((
))))
0
cos
90
cos
====
++++
−−−−
−−−−
αααα
ββββ
A
o
C
T
T
0
1
====
∑
∑
∑
∑
====
i
i
iy
P
,
((((
))))
0
sin
90
sin
====
−−−−
++++
−−−−
Q
T
T
A
o
C
αααα
ββββ
((((
))))
((((
))))
o
o
C
Q
T
90
cos
90
sin
cos
−−−−
++++
−−−−
====
ββββ
ββββ
αααα
,
((((
))))
((((
))))
((((
))))
o
o
o
A
Q
T
90
cos
90
sin
90
cos
−−−−
++++
−−−−
−−−−
====
ββββ
ββββ
ββββ
2
1
1
1
2
2
Opracowanie Instytut Spawalnictwa - Gliwice.
Wszelkie prawa zastrze
żone. Powielanie lub rozpowszechnianie ca
ło
ści wzgl
ędnie
fragmentu w jakiejkolwiek formie i w jakikolwiek sposób jest zabronione.
KURS MIĘDZYNARODOWEGO
INŻYNIERA / TECHNOLOGA / MISTRZA / INSTRUKTORA SPAWALNIKA
(IWE/IWT/IWS/IWP)
Podstawy teorii układów konstrukcji
3.1
Instytut
Spawalnictwa
w Gliwicach
AW 9
11
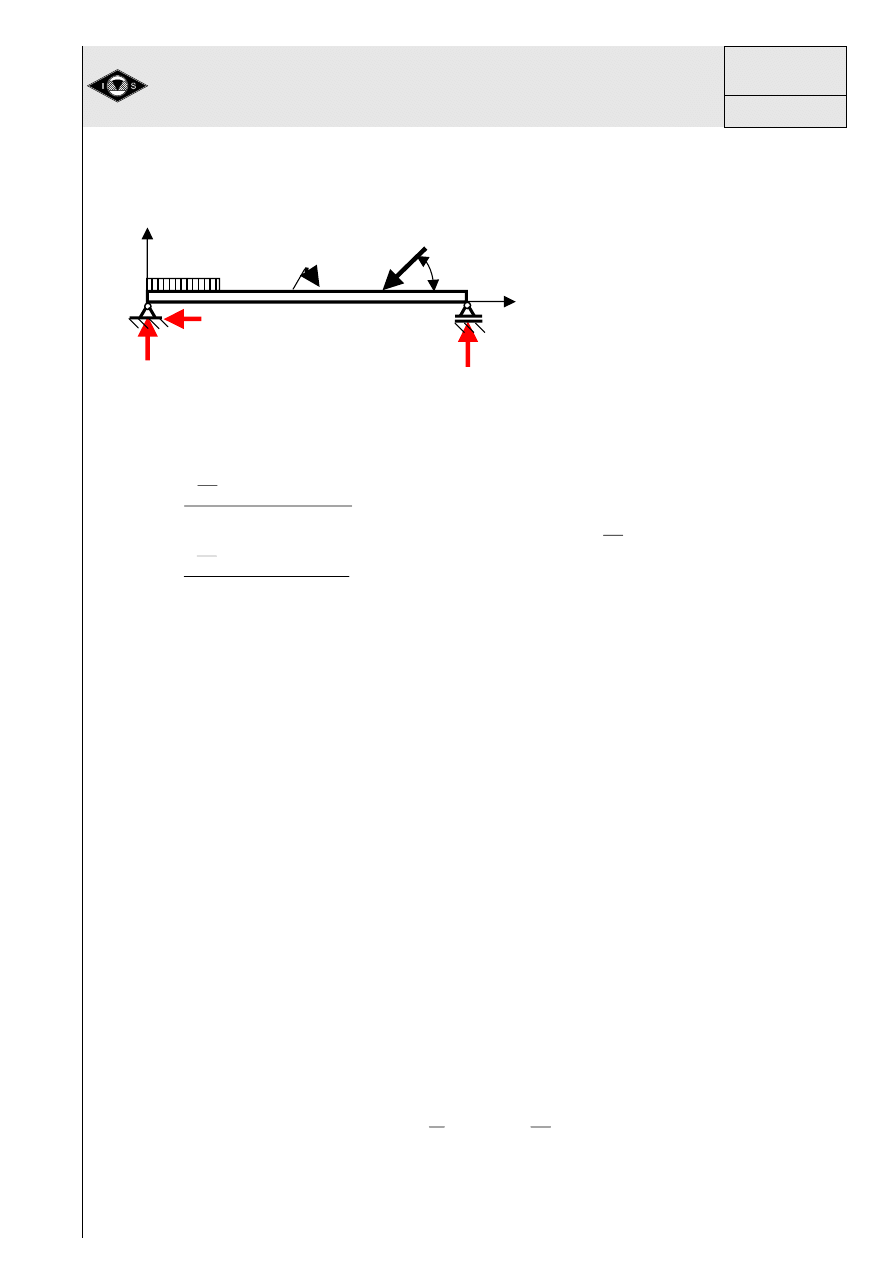
Przykład 2
Dane:
Q, P, wymiary
Szukane:
R
A
, R
B
Warunki równowagi
Rzutów na os x:
Rzutów na o
ś
y:
Momentów wzgl. punktu B:
Rys. 15 Wysi
ę
gnik
Wynik:
Przykład 3
Dane:
P, AB, BC, CD = a
Szukane:
R
Ay
, R
Ax
, R
Dy
Warunki równowagi
Rzutów na os x:
Rzutów na o
ś
y:
Momentów wzgl. punktu B:
Wynik: R
Ay
= R
Ax
= R
Dy
= P
A
R
A
y
B
R
Bx
R
By
D
Q
C
P
x
E
0
,
0
1
====
−−−−
====
∑
∑
∑
∑
====
i
i
Bx
A
ix
R
R
P
0
,
0
1
====
++++
−−−−
−−−−
====
∑
∑
∑
∑
====
By
i
i
iy
R
P
Q
P
∑
∑
∑
∑
====
====
++++
−−−−
−−−−
====
i
i
A
iB
B
A
R
A
C
P
E
D
Q
M
1
0
,
0
P
Q
R
B
A
C
A
P
E
D
Q
R
B
A
C
A
P
E
D
Q
R
By
Bx
A
++++
====
++++
====
++++
====
,
,
0
,
0
1
====
−−−−
====
∑
∑
∑
∑
====
i
i
Ax
ix
R
P
P
0
,
0
1
====
++++
====
∑
∑
∑
∑
====
Dy
Ay
i
i
iy
R
R
P
∑
∑
∑
∑
====
====
−−−−
====
i
i
Dy
iA
a
P
a
R
M
1
0
,
0
A
R
Ay
R
Ax
D
R
Dy
P
B
C
y
x
Rys. 16 Rama
Opracowanie Instytut Spawalnictwa - Gliwice.
Wszelkie prawa zastrze
żone. Powielanie lub rozpowszechnianie ca
ło
ści wzgl
ędnie
fragmentu w jakiejkolwiek formie i w jakikolwiek sposób jest zabronione.
KURS MIĘDZYNARODOWEGO
INŻYNIERA / TECHNOLOGA / MISTRZA / INSTRUKTORA SPAWALNIKA
(IWE/IWT/IWS/IWP)
Podstawy teorii układów konstrukcji
Instytut
Spawalnictwa
w Gliwicach
3.1
AW 10
12
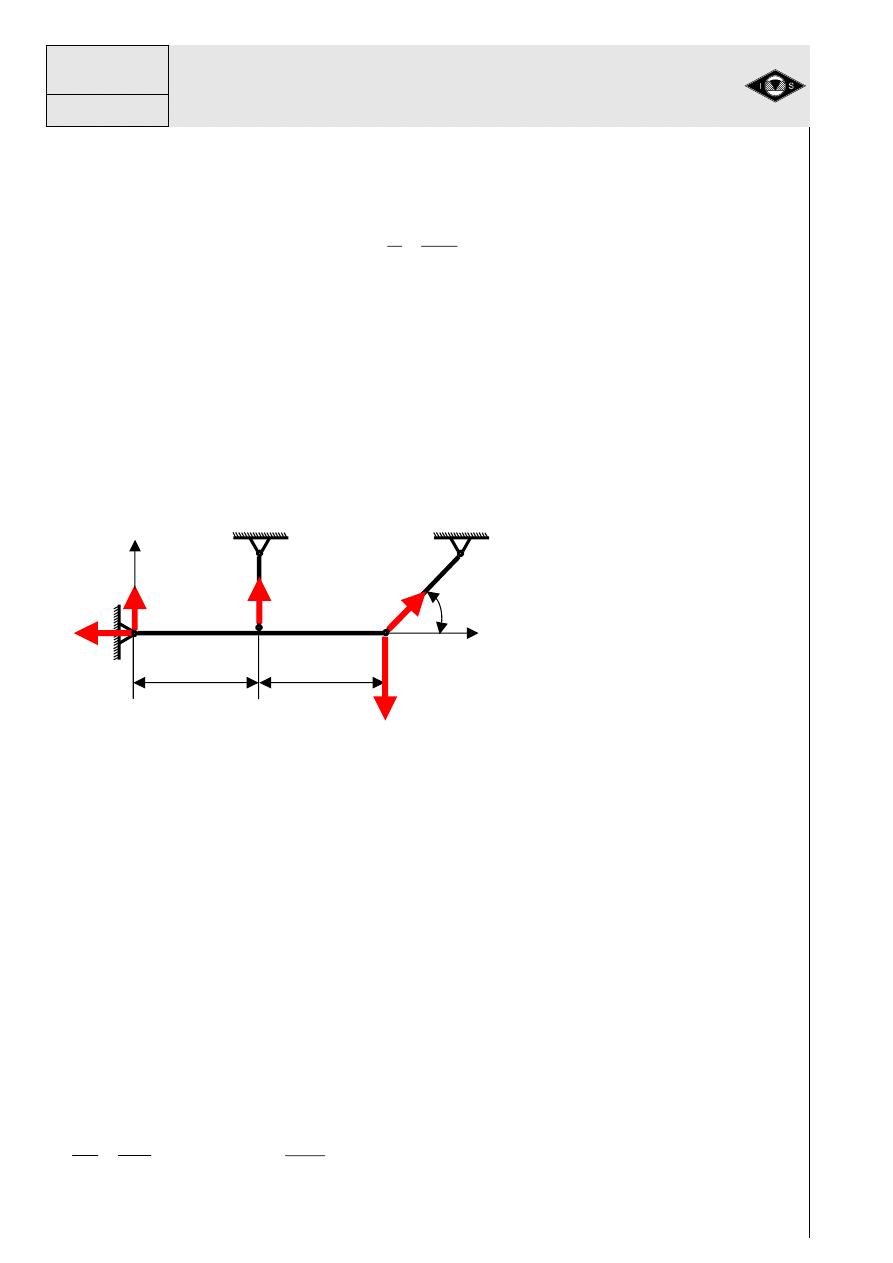
Przykład 4
Dane:
Q, M, P, AB=BC=CD=DE=a
Szukane:
R
Ay
, R
Ax
, R
Ey
Warunki równowagi
Rzutów na os x:
Rzutów na o
ś
y:
Momentów wzgl. punktu A:
5. Układy statycznie niewyznaczalne
W przypadku, kiedy liczba równa
ń
równowagi jest mniejsza od liczby sił we-
wn
ę
trznych, to konstrukcje takie s
ą
nierozwi
ą
zywalne przy zastosowaniu trzech rów-
na
ń
równowagi statyki ciał doskonale sztywnych i nosz
ą
nazw
ę
układów statycznie
niewyznaczalnych.
Do obliczenia niewiadomych sił nale
ż
y wtedy dodatkowo uwzgl
ę
dni
ć
odkształcenia i
przemieszczenia pr
ę
tów. Uzyskane w ten sposób dodatkowe równania współzale
ż
-
no
ś
ci odkształce
ń
stanowi
ą
zale
ż
no
ś
ci o charakterze geometrycznym i uzupełniaj
ą
liczb
ę
równa
ń
. W celu poł
ą
czenia równa
ń
równowagi z równaniami geometrycznymi
nale
ż
y posłu
ż
y
ć
si
ę
zwi
ą
zkami fizycznymi uzale
ż
niaj
ą
cymi wzajemnie siły wewn
ę
trz-
ne i przemieszczenia. W przypadku materiałów liniowo spr
ęż
ystych zwi
ą
zki te wyni-
kaj
ą
bezpo
ś
rednio z prawa Hooke'a.
Prawo Hooke’a jest podstaw
ą
zale
ż
no
ś
ci
ą
teorii spr
ęż
ysto
ś
ci, która wi
ąż
e zale
ż
no-
ś
ci
ą
proporcjonalno
ś
ci odkształcenie i siły. Podstawowa zale
ż
no
ść
przedstawia si
ę
nast
ę
puj
ą
co:
εεεε
σσσσ
E
====
(15)
gdzie:
σ
- napr
ęż
enie [MPa],
E – [MPa] wsp. proporcjonalno
ś
ci; moduł spr
ęż
ysto
ś
ci podłu
ż
nej
(moduł Younge’a)
ε
- wielko
ść
bezwymiarowa odkształcenie wzgl
ę
dne
Przedstawione wielko
ś
ci mo
ż
na przedstawia
ć
w ró
ż
ny sposób:
A
P
====
σσσσ
oraz
l
l
∆∆∆∆
====
εεεε
(16)
gdzie: P – siła [N]
A- pole powierzchni przekroju [mm
2
]
∆
l – wydłu
ż
enie elementu pod działaniem siły P [mm]
0
cos
,
0
1
====
−−−−
−−−−
====
∑
∑
∑
∑
====
αααα
P
R
P
i
i
Ax
ix
0
sin
,
0
1
====
++++
−−−−
−−−−
====
∑
∑
∑
∑
====
Ey
Ay
i
i
iy
R
P
a
q
R
P
αααα
∑
∑
∑
∑
====
====
++++
−−−−
−−−−
−−−−
====
i
i
Ey
iA
a
R
a
P
M
a
q
M
1
2
0
4
3
sin
2
,
0
αααα
Wynik:
αααα
cos
P
R
Ax
====
a
a
P
M
a
q
R
Ey
4
3
sin
2
2
αααα
++++
++++
====
αααα
αααα
sin
4
3
sin
2
2
P
qa
a
a
P
M
a
q
R
Ay
++++
++++
++++
++++
====
x
A
R
Ay
R
Ax
E
R
Ey
q
M
P
B
C
D
α
y
Rys. 17 Belka
Opracowanie Instytut Spawalnictwa - Gliwice.
Wszelkie prawa zastrze
żone. Powielanie lub rozpowszechnianie ca
ło
ści wzgl
ędnie
fragmentu w jakiejkolwiek formie i w jakikolwiek sposób jest zabronione.
KURS MIĘDZYNARODOWEGO
INŻYNIERA / TECHNOLOGA / MISTRZA / INSTRUKTORA SPAWALNIKA
(IWE/IWT/IWS/IWP)
Podstawy teorii układów konstrukcji
3.1
Instytut
Spawalnictwa
w Gliwicach
AW 11
13
l – długo
ść
pocz
ą
tkowa elementu [mm]
Prawo Hooke’a mo
ż
na przedstawi
ć
w rozwini
ę
tej formie:
l
l
E
A
P
∆
=
(17)
Układy statyczne, w których liczba niewiadomych (składowych reakcji) jest wi
ę
ksza
od liczby równa
ń
równowagi nazywamy statycznie niewyznaczalnymi. Przykładami
takich układów b
ę
d
ą
: belki wieloprz
ę
słowe (o trzech lub wi
ę
cej podporach), belki
dwustronnie utwierdzone, belki jednym ko
ń
cem utwierdzone, a na drugim podparte
etc. W tych belkach okre
ś
lenie reakcji b
ą
d
ź
sił wewn
ę
trznych tylko na podstawie
równa
ń
równowagi nie jest mo
ż
liwe. Do ich wyznaczenia nale
ż
y uwzgl
ę
dni
ć
od-
kształcenie tych konstrukcji wykorzystuj
ą
c zale
ż
no
ś
ci geometryczne pomi
ę
dzy tymi
odkształceniami. Najlepiej zilustrowa
ć
to na przykładzie.
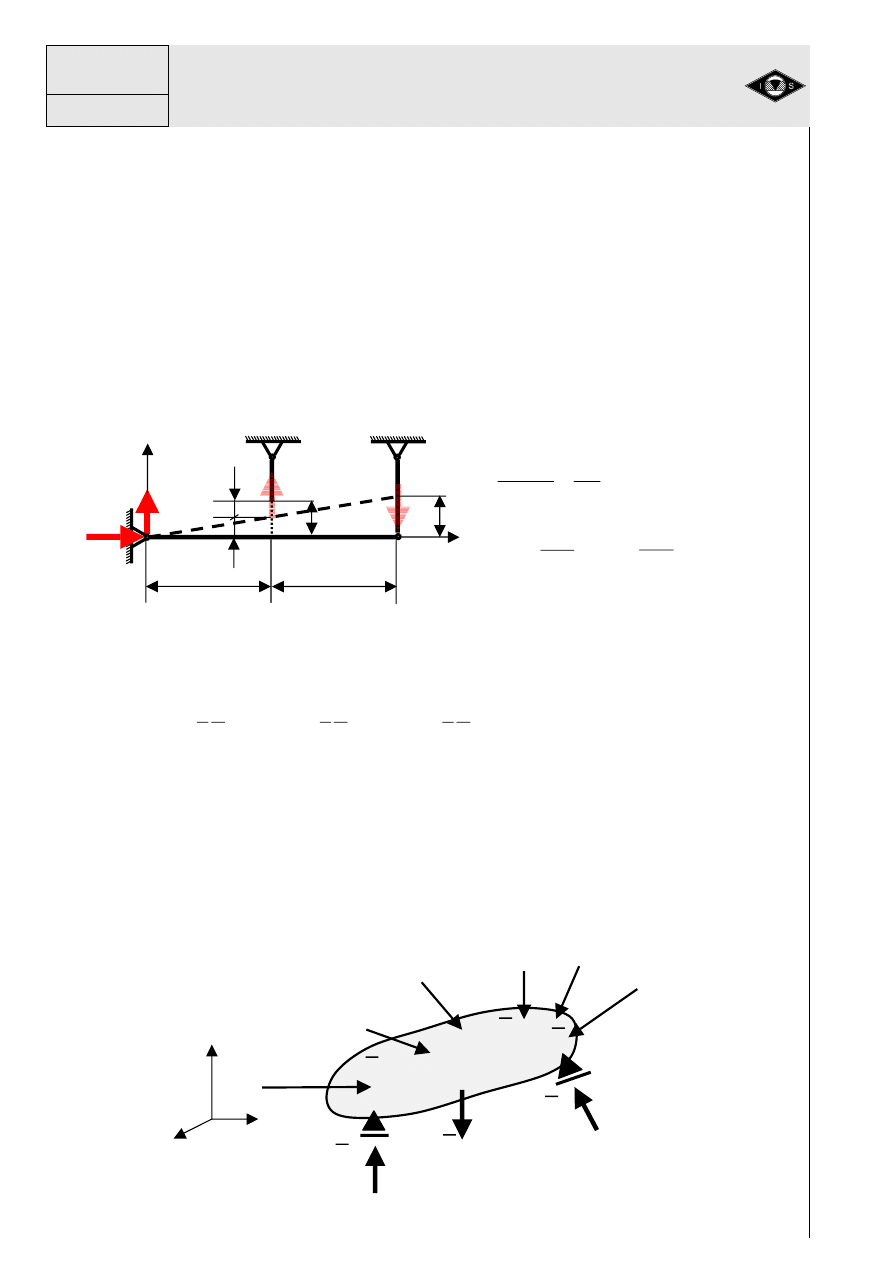
Przykład 5
Przykład stanowi pr
ę
t umocowany przegubowo w podporze stałej O, zawieszony na
dwóch sztywnych ci
ę
gnach 1 i 2 równie
ż
umocowanych przegubowo.
Warunki równowagi:
0
cos
,
0
2
1
====
++++
−−−−
====
∑
∑
∑
∑
====
αααα
N
R
P
i
i
x
ix
(a)
0
sin
,
0
2
1
1
====
−−−−
++++
++++
====
∑
∑
∑
∑
====
P
N
N
R
P
i
i
y
iy
αααα
(b)
∑
∑
∑
∑
====
====
−−−−
++++
====
i
i
iO
a
P
a
N
a
N
M
1
2
1
0
2
2
sin
,
0
αααα
(c)
Dla wyznaczenia czwartego równania wykorzysta
ć
nale
ż
y podstawowy zwi
ą
zek teorii
spr
ęż
ysto
ś
ci, mianowicie prawo Hooke’a. Wi
ąż
e ono w zale
ż
no
ść
proporcjonalno
ś
ci
napr
ęż
enia i odkształcenia. Nale
ż
y zatem przy pomocy zale
ż
no
ś
ci geometrycznych
wyznaczy
ć
przemieszczenia, które wyst
ą
piły w elemencie pod działaniem sił.
Pod działaniem siły P pr
ę
t OAB ulega przemieszczeniu do pozycji O A
1
B
1
. Przy za-
ło
ż
eniu pełnej sztywno
ś
ci i jego nieodkształcalno
ś
ci po odkształceniu jest on lini
ą
prost
ą
. Ci
ę
gna N
1
i N
2
wydłu
żą
si
ę
odpowiednio o
∆
l
1
i
∆
l
2
. Mamy wtedy zale
ż
no
ś
ci
geometryczne wynikaj
ą
ce z twierdzenia Talesa:
a
BB
a
l
2
1
1
====
∆∆∆∆
odcinek
ββββ
sin
2
1
l
BB
∆∆∆∆
====
Rys. 18 Układ pr
ę
towy sta-
tycznie niewyznaczalny
a
a
1
2
N
1
N
2
R
y
R
x
y
x
α
P
O
Istniej
ą
zatem trzy równania równowagi ale
cztery niewiadome: R
x
, R
y
, N
1
, i N
2
. Dla
wyznaczenia
wszystkich
niewiadomych
konieczne jest jeszcze znalezienie jednego
czwartego równania.
Opracowanie Instytut Spawalnictwa - Gliwice.
Wszelkie prawa zastrze
żone. Powielanie lub rozpowszechnianie ca
ło
ści wzgl
ędnie
fragmentu w jakiejkolwiek formie i w jakikolwiek sposób jest zabronione.
KURS MIĘDZYNARODOWEGO
INŻYNIERA / TECHNOLOGA / MISTRZA / INSTRUKTORA SPAWALNIKA
(IWE/IWT/IWS/IWP)
Podstawy teorii układów konstrukcji
Instytut
Spawalnictwa
w Gliwicach
3.1
AW 12
14
Rys.19 Zale
ż
no
ś
ci geometryczne przemieszcze
ń
Napr
ęż
enia w pr
ę
tach wynios
ą
odpowiednio:
1
1
1
A
N
====
σσσσ
a wykorzystuj
ą
c prawo Hooke’a,
1
1
εεεε
σσσσ
E
====
i dalej,
1
1
1
l
l
E
∆∆∆∆
====
σσσσ
1
2
2
A
N
====
σσσσ
a wykorzystuj
ą
c prawo Hooke’a,
2
2
εεεε
σσσσ
E
====
i dalej,
2
2
2
l
l
E
∆∆∆∆
====
σσσσ
Zakładaj
ą
c,
ż
e materiał pr
ę
tów 1 i 2 ma taki sam moduł spr
ęż
ysto
ś
ci podłu
ż
nej i ten
sam przekrój A, po przekształceniu otrzymamy zwi
ą
zek fizyczny pomi
ę
dzy siłami N
1
a N
2
, który b
ę
dzie czwartym równaniem uzupełniaj
ą
cym układ utworzony z warun-
ków równowagi sił:
EA
a
l
N
EA
a
l
N
αααα
sin
2
2
2
1
1
====
a po uproszczeniu
αααα
sin
2
2
2
1
1
l
N
l
N
====
(d)
Rozwi
ą
zuj
ą
c układ równa
ń
(a, b, c, d) o czterech niewiadomych otrzymamy wyniki:
αααα
2
1
2
2
1
sin
4
2
l
l
l
P
N
++++
====
,
αααα
2
1
2
1
1
sin
4
4
l
l
l
P
N
++++
====
,
αααα
αααα
2
1
2
1
sin
4
2
sin
4
l
l
l
P
R
x
++++
====
,
αααα
2
1
2
2
sin
4
l
l
l
P
R
y
++++
−−−−
====
Kolejny przykład dotyczy napr
ęż
e
ń
monta
ż
owych wynikaj
ą
cych z niedokładno
ś
ci
elementów składowych. Na rys. 20 pokazano schemat układu pr
ę
towego z pokaza-
nymi niedokładno
ś
ciami poszczególnych elementów.
Rys.20 Schemat układu monta
ż
owego
0
,
0
1
====
====
∑
∑
∑
∑
====
i
i
x
ix
R
P
(a’)
0
,
0
2
1
1
====
−−−−
++++
====
∑
∑
∑
∑
====
N
N
R
P
i
i
y
iy
(b’)
∑
∑
∑
∑
====
====
−−−−
====
i
i
iO
a
N
a
N
M
1
2
1
0
2
,
0
(c’)
α
O
α
A
1
A
B
1
B
C
∆
l
1
∆
l
2
1
2
a
a
1
2
N
1
N
2
R
y
R
x
y
O
δ
A
B
Opracowanie Instytut Spawalnictwa - Gliwice.
Wszelkie prawa zastrze
żone. Powielanie lub rozpowszechnianie ca
ło
ści wzgl
ędnie
fragmentu w jakiejkolwiek formie i w jakikolwiek sposób jest zabronione.
KURS MIĘDZYNARODOWEGO
INŻYNIERA / TECHNOLOGA / MISTRZA / INSTRUKTORA SPAWALNIKA
(IWE/IWT/IWS/IWP)
Podstawy teorii układów konstrukcji
3.1
Instytut
Spawalnictwa
w Gliwicach
AW 13
15
Jak wida
ć
na rys. 20 niedokładno
ść
monta
ż
owa
δ
wynika z zastosowania zbyt krót-
kiego pr
ę
ta 1. Naci
ą
gni
ę
cie tego pr
ę
ta do utworzenia poł
ą
czenia z belk
ą
OAB spo-
woduje napi
ę
cia N
1
i N
2
w pr
ę
tach 1 i 2 oraz przemieszczenie belki. Wyst
ą
pi
ą
nie-
wiadome reakcje w podporze O i wspomniane ju
ż
napi
ę
cia. I w tym przypadku ujaw-
nia si
ę
układ statycznie niewyznaczalny. Mamy trzy równania równowagi i cztery nie-
wiadome: R
x
, R
y
, N
1
i N
2
. Konieczna jest zatem dodatkowa zale
ż
no
ść
wi
ążą
ca wa-
runki geometryczne i siłowe. Zakładamy,
ż
e belka OAB jest nieodkształcalna i nie-
wa
ż
ka, natomiast pr
ę
ty 1 i 2 o tej samej długo
ś
ci, przekroju i z tego samego materia-
łu s
ą
niewa
ż
kie ale odkształcalne w zale
ż
no
ś
ci liniowej Hooke’a. Po naci
ą
gni
ę
ciu
pr
ę
ta 1 układ przedstawiony na rys.20 przyjmie posta
ć
(rys.21).
Zale
ż
no
ś
ci geometryczne:
1
l
∆∆∆∆
−−−−
====
∆∆∆∆
δδδδ
a
l
a
l
2
2
1
∆∆∆∆
====
∆∆∆∆
−−−−
δδδδ
(d’)
Zale
ż
no
ś
ci fizyczne:
EA
l
N
l
1
1
====
∆∆∆∆
,
EA
l
N
l
2
2
====
∆∆∆∆
Rys.12 Układ statycznie niewyznaczalny po zaczepieniu ci
ę
gien 1 i 2 do belki.
Do równania (d’) tworz
ą
cego zale
ż
no
ść
geometryczn
ą
nale
ż
y podstawi
ć
zale
ż
no
ś
ci
fizyczne i nast
ę
pnie rozwi
ą
za
ć
układ równa
ń
a’, b’, c’ i d’. Wynik przyjmie posta
ć
:
0
====
x
R
,
EA
l
R
y
δδδδ
5
2
−−−−
====
,
EA
l
N
δδδδ
5
4
1
====
,
EA
l
N
δδδδ
5
2
2
====
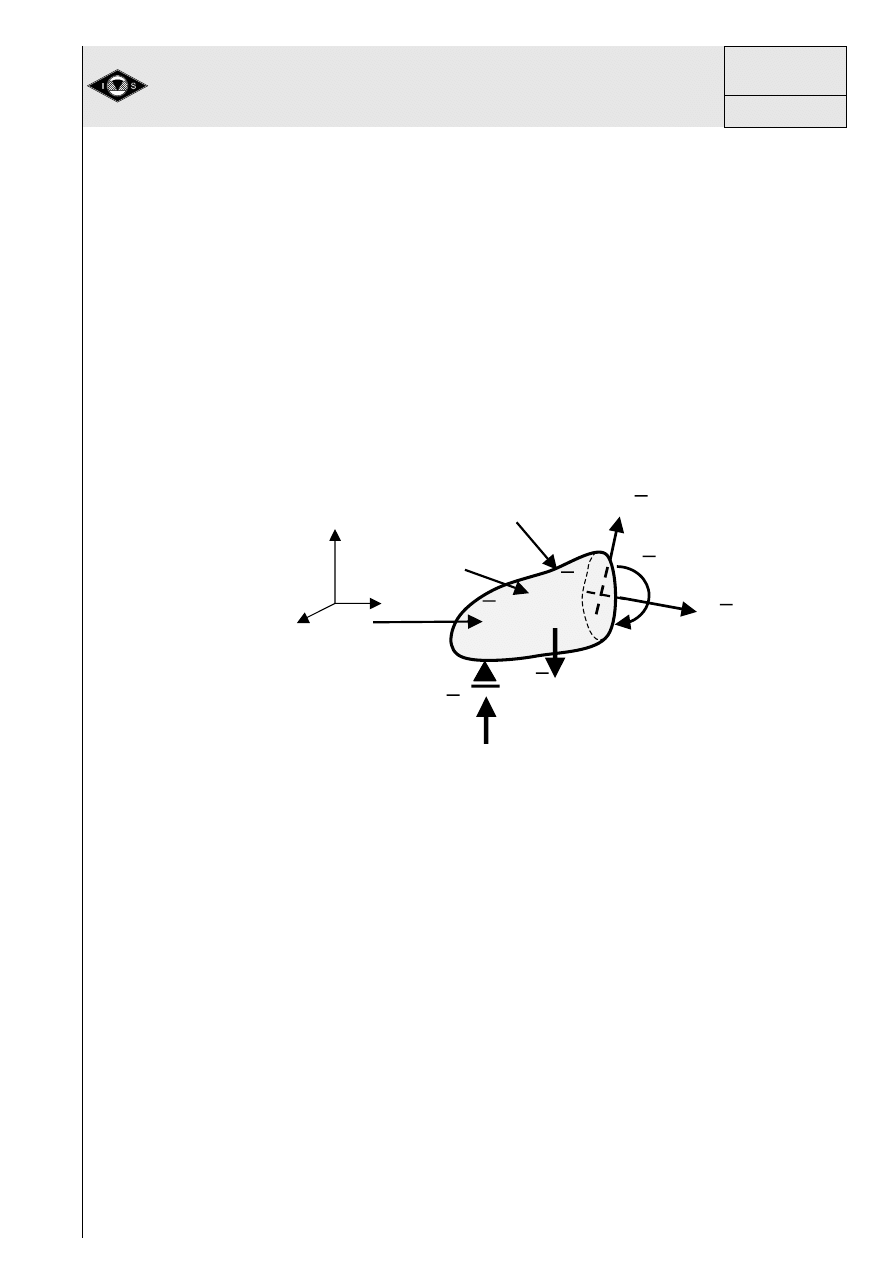
6. Napr
ęż
enia jako efekt obci
ąż
e
ń
zewn
ę
trznych
Siłami zewn
ę
trznymi nazywamy siły, które zast
ę
puj
ą
działanie sił oddziałuj
ą
-
cych na rozpatrywane ciało, przy izolowaniu tego ciała od innych, pierwotnie z nim
poł
ą
czonych. Wyst
ę
puj
ą
one jako tzw. siły czynne obci
ąż
aj
ą
ce ciało i jako reakcje
wi
ę
zów, tzw. siły bierne. Siłami czynnymi b
ę
d
ą
: ci
ęż
ar całkowity ciała stałego lub ci
ę
-
ż
ary cz
ą
stkowe w zło
ż
onych układach mechanicznych, siły dynamiczne działaj
ą
ce
przez okre
ś
lony czas i wynikaj
ą
ce z ruchu mas. Siłami biernymi s
ą
reakcje w wi
ę
zach
i podporach. Na rys. 22 pokazano uogólniony układ mechaniczny b
ę
d
ą
cy w równo-
wadze statycznej.
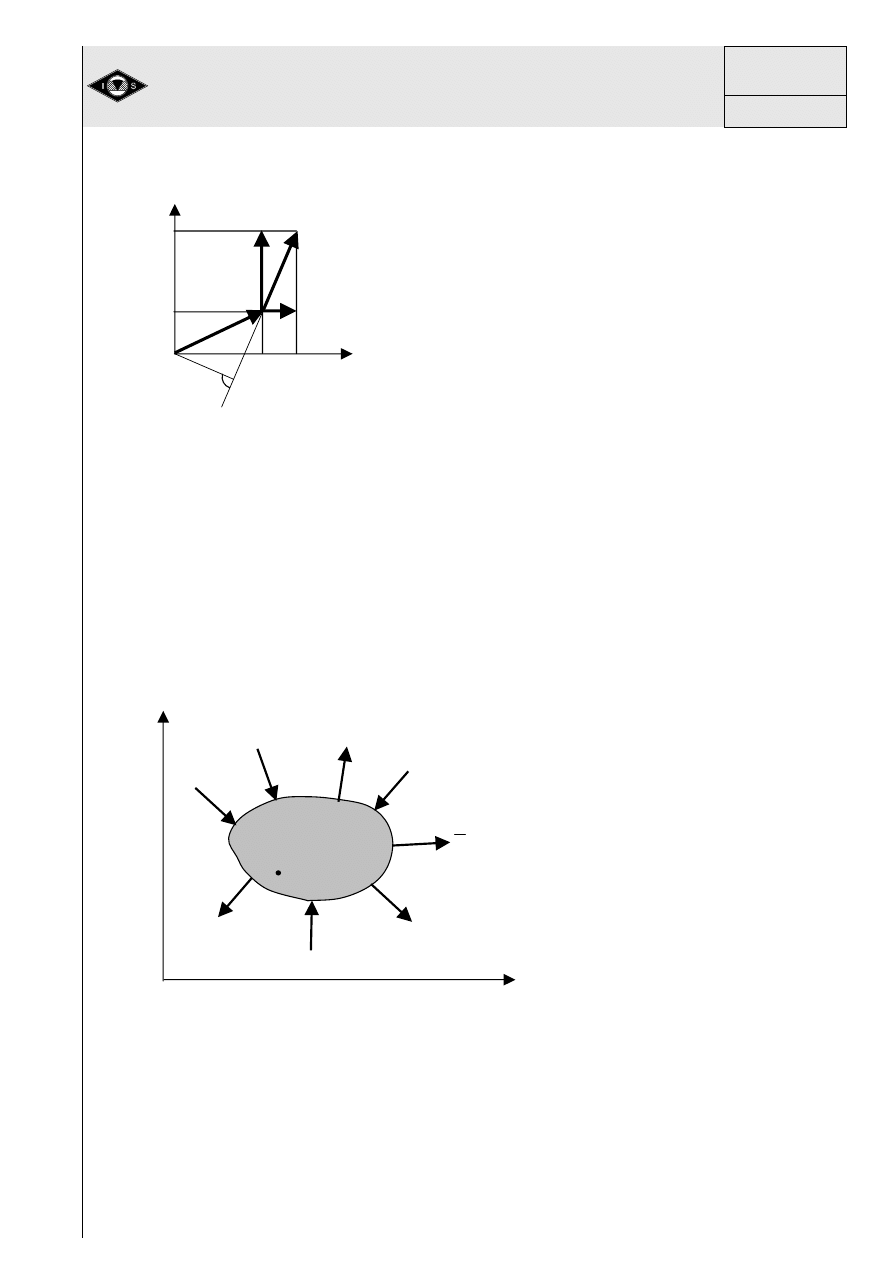
Rys.22 Uogólniony układ mechaniczny w równowadze statycznej
a
a
1
2
N
1
N
2
R
y
R
x
y
O
δ
A
B
∆
l
1
∆
∆
l
2
B’
A’
P
1
P
n
P
i
x
y
x
R
A
Q
R
B
A
B
O
G
Opracowanie Instytut Spawalnictwa - Gliwice.
Wszelkie prawa zastrze
żone. Powielanie lub rozpowszechnianie ca
ło
ści wzgl
ędnie
fragmentu w jakiejkolwiek formie i w jakikolwiek sposób jest zabronione.
KURS MIĘDZYNARODOWEGO
INŻYNIERA / TECHNOLOGA / MISTRZA / INSTRUKTORA SPAWALNIKA
(IWE/IWT/IWS/IWP)
Podstawy teorii układów konstrukcji
Instytut
Spawalnictwa
w Gliwicach
3.1
AW 14
16
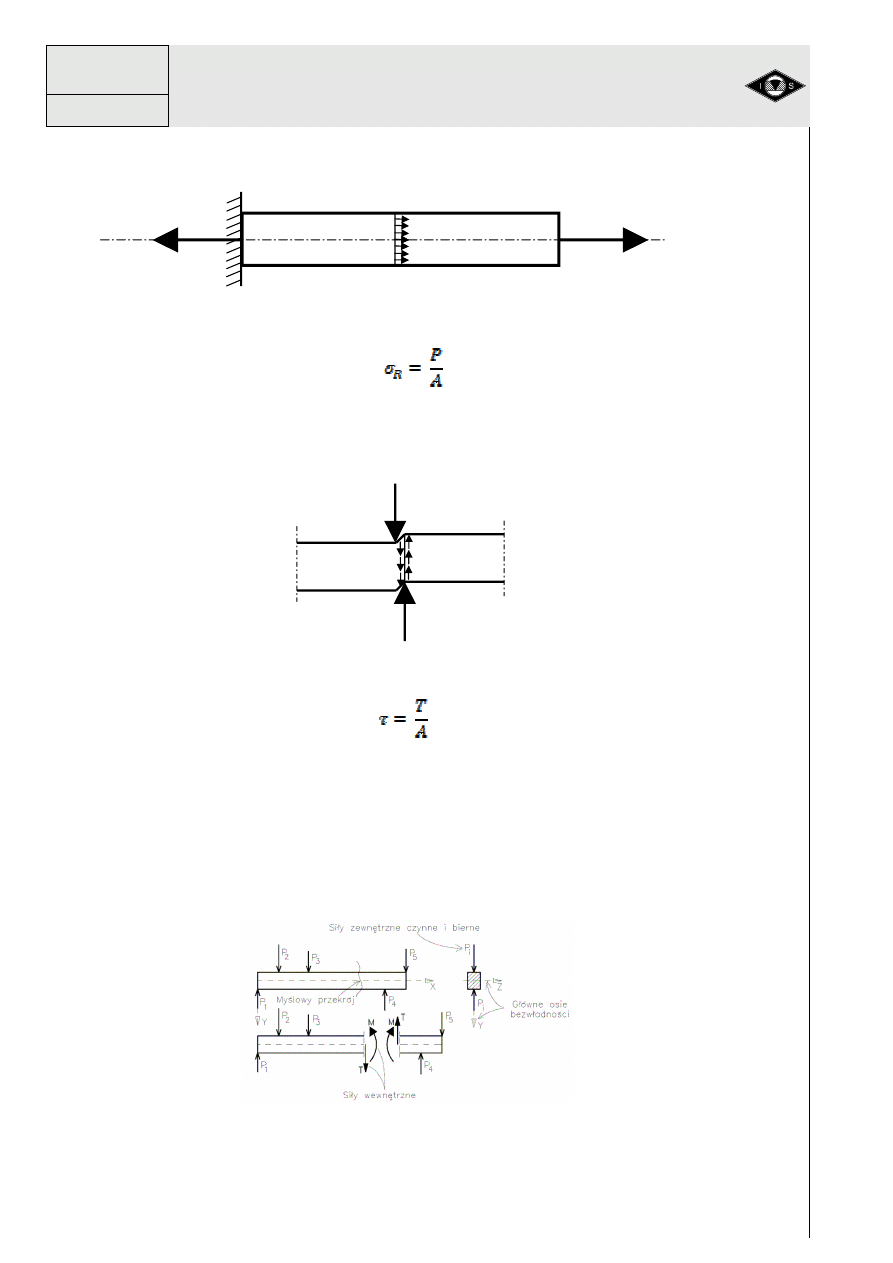
W przestrzeni opisanej układem współrz
ę
dnych prostok
ą
tnych O,x,y,x istnieje ciało
stałe Q, na które oddziaływaj
ą
siły zewn
ę
trzne P
1
… P
n
, ci
ęż
ar własny G i reakcje R
A
i R
B
, b
ę
d
ą
ce w równowadze statycznej. Ciało stałe Q jako pewna ci
ą
gło
ść
materialna
jest elementem ł
ą
cz
ą
cym obszar oddziaływania wszystkich sił. W rezultacie w jego
obj
ę
to
ś
ci wyst
ą
pi
ą
jakie
ś
siły, które b
ę
d
ą
ł
ą
czy
ć
układ w pewn
ą
zrównowa
ż
on
ą
ca-
ło
ść
. Siły te nazywa si
ę
siłami wewn
ę
trznymi lub napi
ę
ciami. Aby je wyznaczy
ć
nale-
ż
y je „uzewn
ę
trzni
ć
” poprzez przeci
ę
cie ciała Q, odrzucenie odci
ę
tej cz
ęś
ci i zało
ż
e-
nie w przekroju sił wewn
ę
trznych (rys.23). Po odrzuceniu, w naszym przypadku cz
ę
-
ś
ci lewej, nale
ż
y w utworzonym przekroju zało
ż
y
ć
siły wewn
ę
trzne: normaln
ą
N,
styczn
ą
T i moment M. Nowy układ musi równie
ż
spełnia
ć
warunki równowagi sta-
tycznej. Mo
ż
na z tego wywnioskowa
ć
,
ż
e w ró
ż
nych przekrojach i ich poło
ż
eniach siły
wewn
ę
trzne mog
ą
si
ę
ró
ż
ni
ć
. Wykonuj
ą
cy obliczenia sprawdzaj
ą
ce musi zatem wy-
bra
ć
przekrój, w którym te siły mog
ą
by
ć
najwi
ę
ksze – b
ę
dzie to przekrój niebez-
pieczny. Jest najwa
ż
niejszy element pracy projektanta i decyduj
ą
cy o bezpiecze
ń
-
stwie eksploatacji konstrukcji.
Rys.23 Ujawnienie sił wewn
ę
trznych
Dla wygody i zwi
ę
kszenia wydajno
ś
ci oblicze
ń
siły wewn
ę
trzne odnosi si
ę
do rozpa-
trywanego przekroju. Tak przekształcone siły wewn
ę
trzne nazywamy napr
ęż
eniami.
Jednostkami napr
ęż
e
ń
s
ą
: MPa, N/mm
2
. W napr
ęż
eniach i ich jednostkach wyra
ż
ane
s
ą
parametry materiałowe takie jak: granica plastyczno
ś
ci lub wytrzymało
ść
na roz-
ci
ą
ganie. Mo
ż
na wtedy łatwo porówna
ć
wyniki oblicze
ń
wytrzymało
ś
ciowych z warto-
ś
ciami granicznymi dla danych materiałów rzeczywistych.
W odniesieniu do przekroju wyst
ę
puj
ą
dwa rodzaje napr
ęż
e
ń
: napr
ęż
enia normalne
(
σ)
i styczne (
τ).
Okre
ś
lenie warto
ś
ci napr
ęż
e
ń
normalnych
σσσσ
i stycznych
ττττ
w po-
szczególnych punktach przekroju jest podstawowym zadaniem wytrzymało
ś
ci mate-
riałów. Cz
ę
sto rozkład tych napr
ęż
e
ń
nie jest równomierny na przekroju i wtedy nale-
ż
y wyznaczy
ć
funkcje, które okre
ś
laj
ą
warto
ś
ci tych napr
ęż
e
ń
w ró
ż
nych punktach
przekroju.
Siły wewn
ę
trzne b
ę
d
ą
zale
ż
e
ć
od rozkładu i warto
ść
i oddziaływa
ń
zewn
ę
trznych.
Jednym z zada
ń
statyki jest wyznaczenie rozkładów i warto
ś
ci sił wewn
ę
trznych, któ-
re jest kolejnym krokiem w wyznaczaniu stanów napr
ęż
e
ń
w poszczególnych prze-
krojach.
Jednym z najprostszych stanów napr
ęż
e
ń
jest stan napr
ęż
e
ń
rozci
ą
gaj
ą
cych. Jest
wynikiem oddziaływania sił rozci
ą
gaj
ą
cych na element ci
ę
gnowy sztywny lub wiotki.
Warunkiem jednoosiowego stanu napr
ęż
e
ń
jest poło
ż
enie siły czynnej i biernej w
jednej osi prostopadle do przekroju niebezpiecznego (rys.24).
P
i
T
M
x
y
x
O
R
A
A
P
1
N
G
Opracowanie Instytut Spawalnictwa - Gliwice.
Wszelkie prawa zastrze
żone. Powielanie lub rozpowszechnianie ca
ło
ści wzgl
ędnie
fragmentu w jakiejkolwiek formie i w jakikolwiek sposób jest zabronione.
KURS MIĘDZYNARODOWEGO
INŻYNIERA / TECHNOLOGA / MISTRZA / INSTRUKTORA SPAWALNIKA
(IWE/IWT/IWS/IWP)
Podstawy teorii układów konstrukcji
3.1
Instytut
Spawalnictwa
w Gliwicach
AW 15
17
Rys.24 Stan napr
ęż
e
ń
rozci
ą
gaj
ą
cych
Zjawisko
ś
ciskania zachodzi w taki sam sposób jak rozci
ą
ganie z t
ą
ró
ż
nic
ą
,
ż
e siły
czynne oddziaływaj
ą
z przeciwnym zwrotem.
Zjawisko
ś
cinania zwi
ą
zane jest z napr
ęż
eniami
ś
cinaj
ą
cymi - stycznymi. Siły we-
wn
ę
trzne tworz
ą
ce ten stan s
ą
ukierunkowane stycznie do rozpatrywanego przekro-
ju.
Rys. 25 Stan napr
ęż
e
ń
stycznych przy
ś
cinaniu
7. Zginanie
Zjawisko zginania jest efektem oddziaływania sił wewn
ę
trznych w postaci mo-
mentów gn
ą
cych oraz cech geometrycznych przekroju poprzecznego elementu zgi-
nanego. Dla uproszczenia element zginany zostanie nazwany belk
ą
. Do wyznacza-
nia sił wewn
ę
trznych wykorzystuje si
ę
metod
ę
my
ś
lowych przekrojów. Przy stałym
przekroju belki granicami odcinków, w których nale
ż
y dokona
ć
my
ś
lowych przekro-
jów, s
ą
punkty przyło
ż
enia sił zewn
ę
trznych – czynnych i biernych (reakcji podporo-
wych).
Rys. 26 Momenty gn
ą
ce jako ujawnione siły wewn
ę
trzne
Na rys.26 pokazano zastosowanie metody my
ś
lowych przekrojów, układ współrz
ę
d-
nych (o
ś
Y skierowana jest w dół, o
ś
X wzdłu
ż
osi belki) oraz siły wewn
ę
trzne w bel-
ce.
P
R
σ
R
A – pole powierzchni
T
T
τ
A
(18)
(19)
Opracowanie Instytut Spawalnictwa - Gliwice.
Wszelkie prawa zastrze
żone. Powielanie lub rozpowszechnianie ca
ło
ści wzgl
ędnie
fragmentu w jakiejkolwiek formie i w jakikolwiek sposób jest zabronione.
KURS MIĘDZYNARODOWEGO
INŻYNIERA / TECHNOLOGA / MISTRZA / INSTRUKTORA SPAWALNIKA
(IWE/IWT/IWS/IWP)
Podstawy teorii układów konstrukcji
Instytut
Spawalnictwa
w Gliwicach
3.1
AW 16
18
7.1 Siły wewn
ę
trzne
W zginaniu wyst
ę
puj
ą
dwie siły wewn
ę
trzne – siła poprzeczna T w płaszczy
ź
-
nie obci
ąż
enia XY oraz moment zginaj
ą
cy M, którego wektor jest prostopadły do
płaszczyzny XY. W obliczeniach wytrzymało
ś
ciowych belek rzecz
ą
podstawow
ą
jest
wyznaczenie rozkładów T i M. Maksymalne warto
ś
ci tych sił wskazuj
ą
na przekroje
najbardziej obci
ąż
one, na przekroje niebezpieczne. Umowne okre
ś
lenie znaków sił
wewn
ę
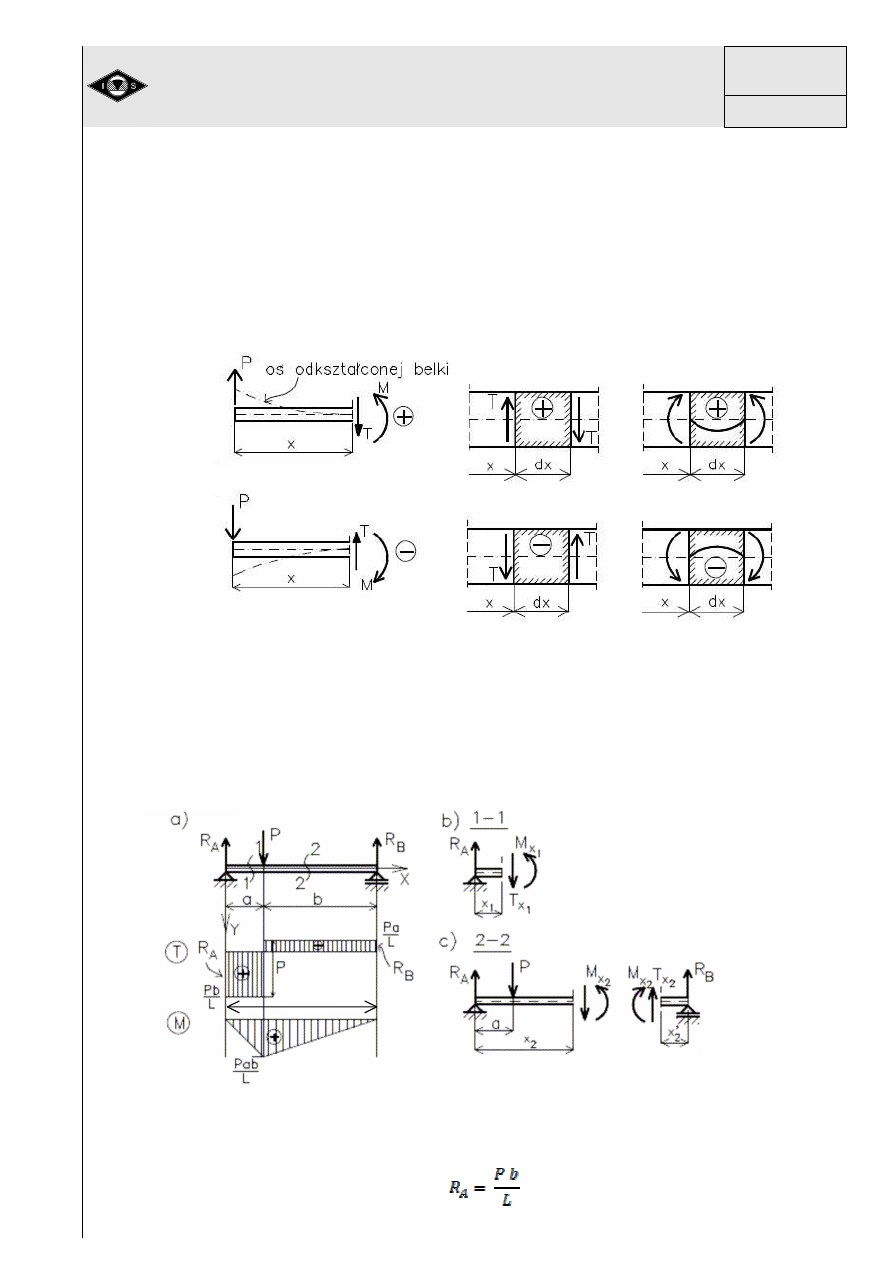
trznych pokazano na rys 27.
Rys.27 Okre
ś
lenie znaków sił wewn
ę
trznych przy zginaniu
Przykład 7
Dla belki przedstawionej na rys.28 wykona
ć
wykresy sił poprzecznych i momentów zgi-
naj
ą
cych. Zadanie jest statycznie wyznaczalne.
Rys.28 Wykresy momentów gn
ą
cych i sił poprzecznych (tn
ą
cych)
w belce obci
ąż
onej siła skupion
ą
Reakcje podporowe (siły bierne) wynosz
ą
odpowiednio:
L
Opracowanie Instytut Spawalnictwa - Gliwice.
Wszelkie prawa zastrze
żone. Powielanie lub rozpowszechnianie ca
ło
ści wzgl
ędnie
fragmentu w jakiejkolwiek formie i w jakikolwiek sposób jest zabronione.
KURS MIĘDZYNARODOWEGO
INŻYNIERA / TECHNOLOGA / MISTRZA / INSTRUKTORA SPAWALNIKA
(IWE/IWT/IWS/IWP)
Podstawy teorii układów konstrukcji
3.1
Instytut
Spawalnictwa
w Gliwicach
AW 17
19
Poniewa
ż
belka ma stały przekrój poprzeczny, my
ś
lowe przekroje wyznacza si
ę
w prze-
działach ograniczonych punktami przyło
ż
enia obci
ąż
e
ń
(rys. 28 b,c):
Dla przedziału 1-1
Siła poprzeczna
Moment gn
ą
cy
dla
Dla przedziału 2-2
Siła poprzeczna
Moment gn
ą
cy
dla
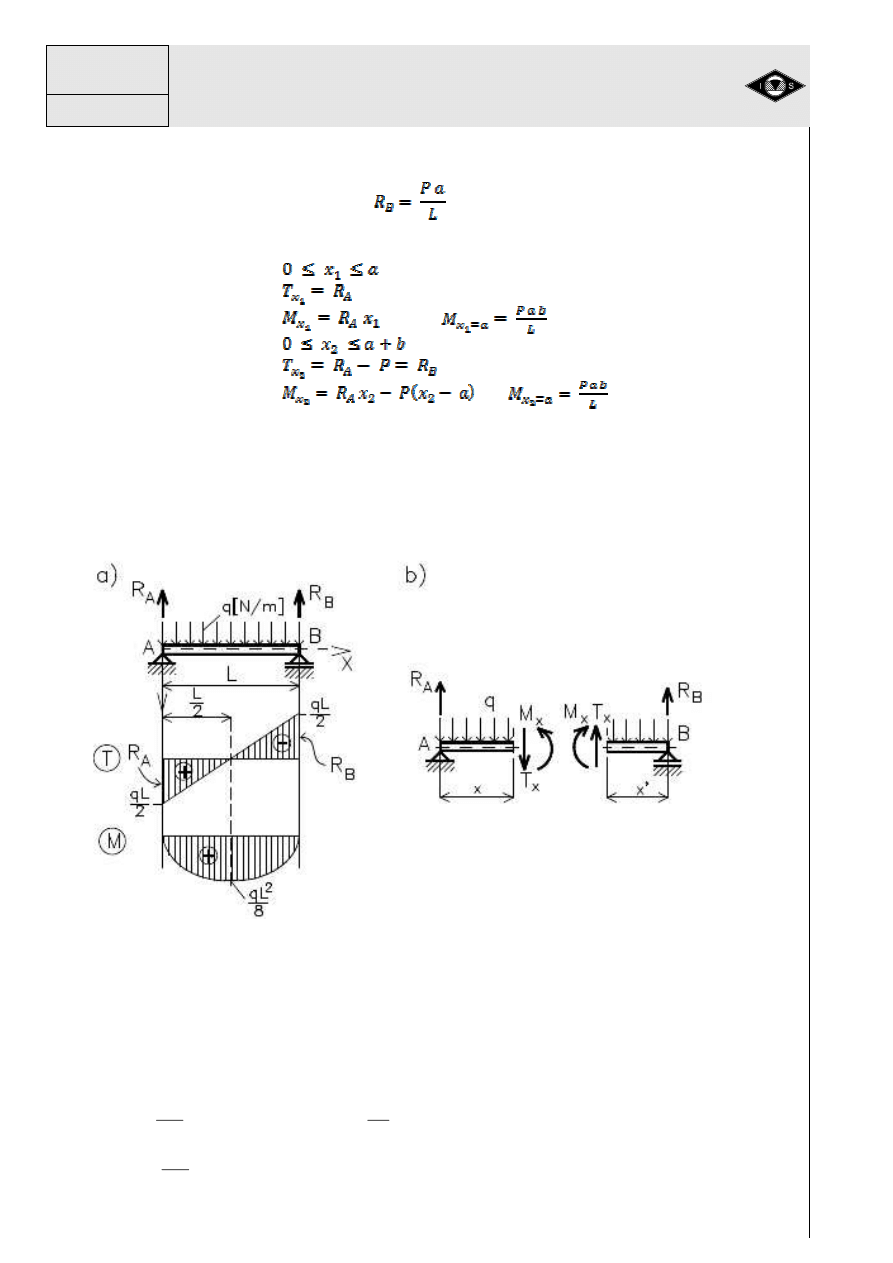
Przykład 8
Dla belki obci
ąż
onej w sposób ci
ą
gły obci
ąż
eniem o stałej intensywno
ś
ci q wykona
ć
wykresy sił poprzecznych i momentów zginaj
ą
cych (rys.29).
Rys. 29 Zginanie belki obci
ąż
onej sił
ą
równomiernie rozło
ż
on
ą
Obci
ąż
enie ci
ą
głe q = const działaj
ą
ce na odcinku L mo
ż
na zast
ą
pi
ć
sił
ą
wypadkow
ą
q L,
przyło
ż
on
ą
w połowie długo
ś
ci odcinka (wypadkowa układu sił równoległych). Z sumy
momentów wzgl
ę
dem podpór A i B otrzymuje si
ę
R
A
= R
B
= qL/2 (rys. 20 a). W belce wy-
starczy rozpatrzy
ć
tylko jeden przedział 0
≤
x
≤
L, w którym
qx
R
T
A
x
−
=
2
0
L
q
R
T
A
x
=
=
=
,
2
qL
qL
R
T
A
L
x
−
=
−
=
=
2
2
qx
x
R
M
A
x
−
=
Opracowanie Instytut Spawalnictwa - Gliwice.
Wszelkie prawa zastrze
żone. Powielanie lub rozpowszechnianie ca
ło
ści wzgl
ędnie
fragmentu w jakiejkolwiek formie i w jakikolwiek sposób jest zabronione.
KURS MIĘDZYNARODOWEGO
INŻYNIERA / TECHNOLOGA / MISTRZA / INSTRUKTORA SPAWALNIKA
(IWE/IWT/IWS/IWP)
Podstawy teorii układów konstrukcji
Instytut
Spawalnictwa
w Gliwicach
3.1
AW 18
20
Wykres momentów gn
ą
cych jest parabol
ą
i ma warto
ś
ci zerowa w podporach belki.
Dla wyznaczenia ekstremum funkcji - w rozpatrywanym przypadku jej maksimum na-
le
ż
y zró
ż
niczkowa
ć
równanie momentów gn
ą
cych.
L
q
R
x
T
qx
R
dx
dM
A
m
x
A
2
1
0
=
=
→
=
=
−
=
8
2
2
1
2
2
2
max
qL
L
q
L
R
M
M
A
x
x
m
=
−
=
=
=
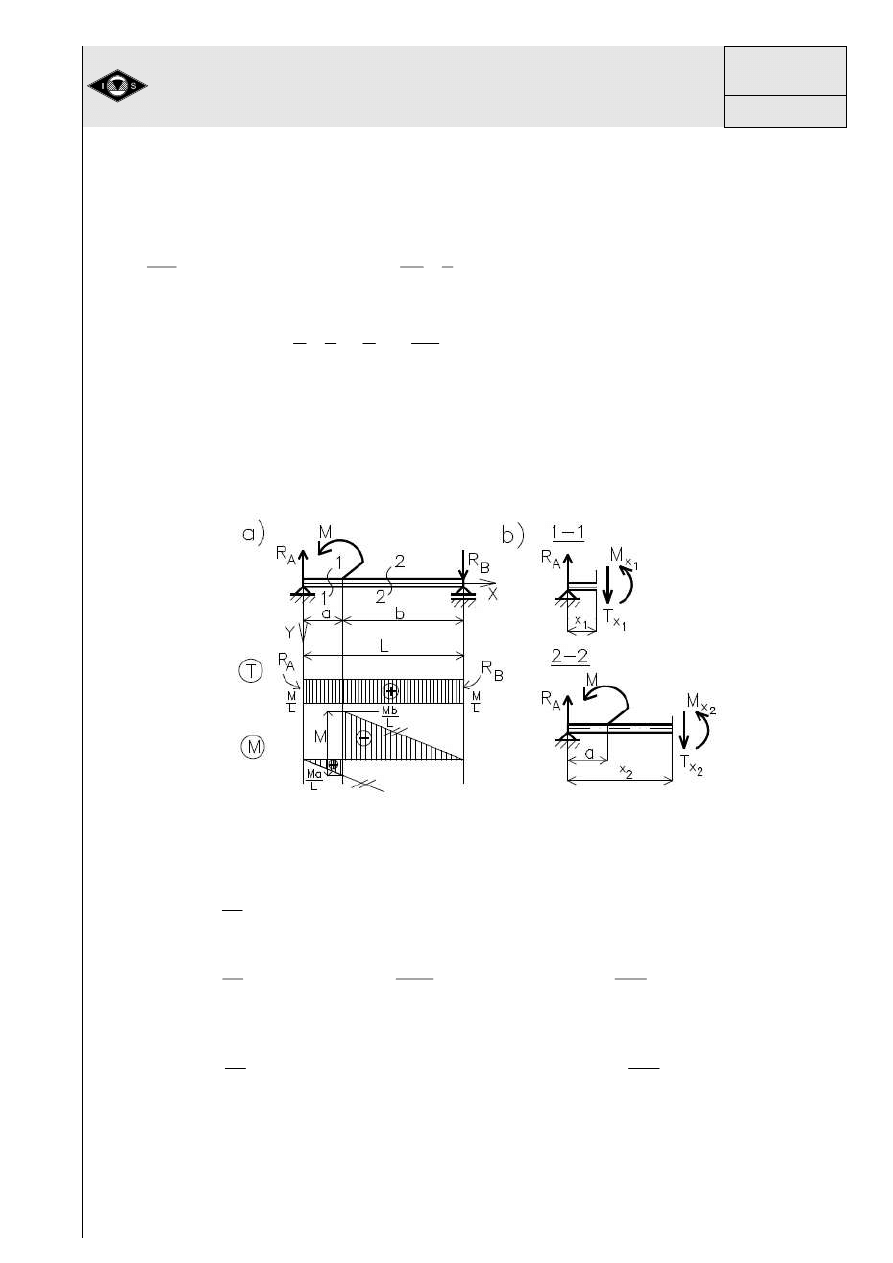
Przykład 9
Dla belki obci
ąż
onej momentem skupionym M wykona
ć
wykresy sił poprzecznych i
momentów zginaj
ą
cych (rys.30).
Rys.30 Zginanie belki obci
ąż
onej momentem skupionym
Z równa
ń
równowagi statycznej mo
ż
na wyliczy
ć
reakcje podporowe:
L
M
R
R
B
A
=
=
W przedziale 1-1 (0
≤
x
1
≤
a) siły wewn
ę
trzne
L
M
R
T
A
x
=
=
1
,
L
x
M
x
R
M
A
X
1
1
1
=
=
,
0
0
1
=
=
x
M
,
L
a
M
M
a
x
=
=
1
W przedziale 2-2 ( 0
≤
x
2
≤
L)
L
M
R
T
A
x
=
=
2
,
M
x
R
M
A
X
−
=
2
2
,
0
2
=
=
L
x
M
,
L
b
M
M
a
x
−
=
=
2
Na rys. 30 pokazano wykresy sił wewn
ę
trznych.
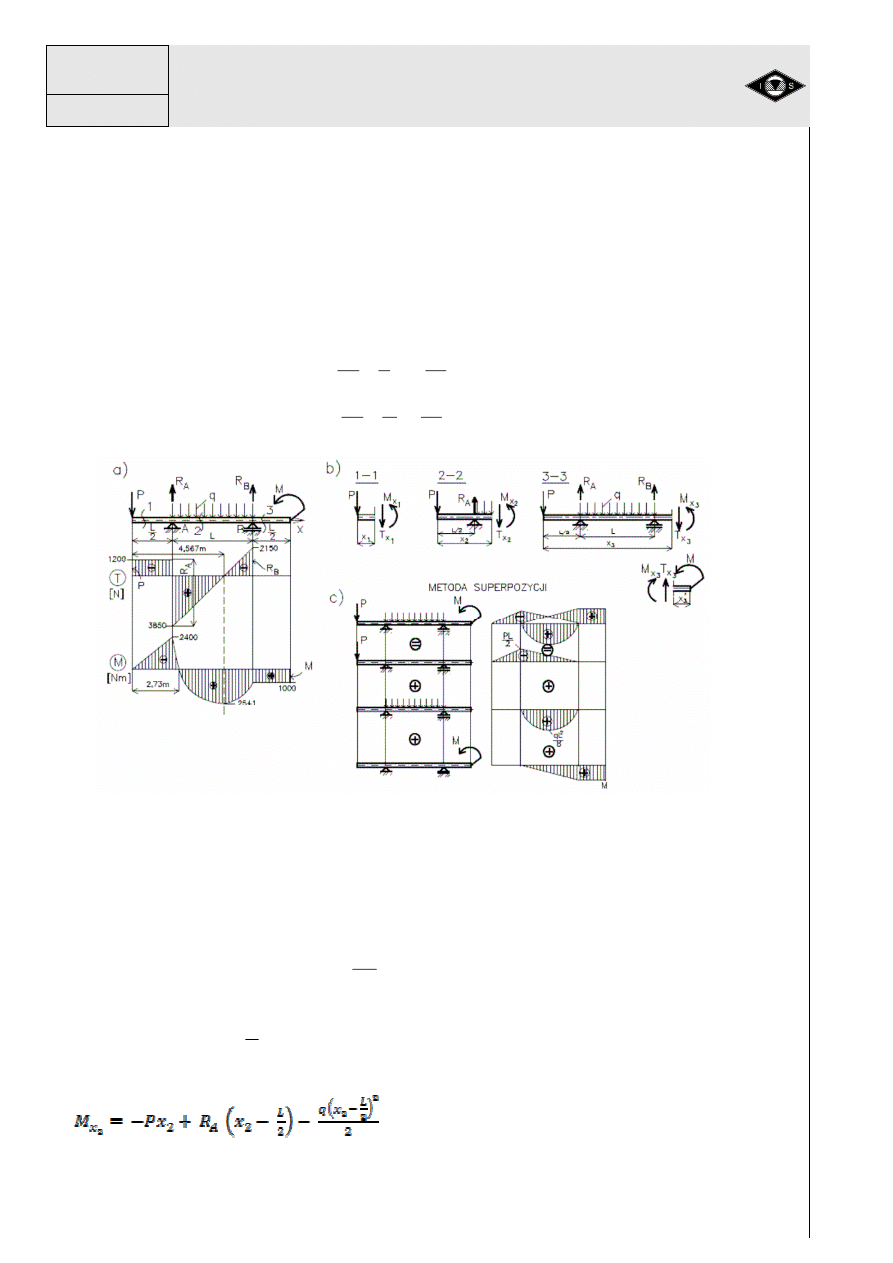
Przykład 10
Opracowanie Instytut Spawalnictwa - Gliwice.
Wszelkie prawa zastrze
żone. Powielanie lub rozpowszechnianie ca
ło
ści wzgl
ędnie
fragmentu w jakiejkolwiek formie i w jakikolwiek sposób jest zabronione.
KURS MIĘDZYNARODOWEGO
INŻYNIERA / TECHNOLOGA / MISTRZA / INSTRUKTORA SPAWALNIKA
(IWE/IWT/IWS/IWP)
Podstawy teorii układów konstrukcji
3.1
Instytut
Spawalnictwa
w Gliwicach
AW 19
21
Dla belki przedstawionej na rys.31 wykona
ć
wykresy sił wewn
ę
trznych (sił poprzecz-
nych oraz momentów zginaj
ą
cych). Przyj
ąć
dane: P = 1200 N, q = 1500 N/m, M =
1000 Nm, L = 4 m. Wykona
ć
dodatkowo wykres momentów, korzystaj
ą
c z zasady
superpozycji. Na rys. 31 pokazano schemat belki obci
ąż
onej sił
ą
skupion
ą
, siła rów-
nomiernie rozło
ż
on
ą
i momentem skupionym Jak wida
ć
jest to zadanie zbiorcze, w
zakresie którego s
ą
poprzednie sposoby obci
ąż
ania belek.
Reakcje podporowe
N
L
M
P
qL
R
A
5050
2
3
2
=
+
+
=
N
L
M
P
qL
R
B
2150
2
2
=
−
+
=
Rys. 31 Siły wewn
ę
trzne w belce obci
ąż
onej sił
ą
skupion
ą
,
równomiernie rozło
ż
on
ą
i momentem skupionym
Siły wewn
ę
trzne w trzech zało
ż
onych przekrojach (rys. 31 b).
W przedziale 0
≤
x
1
≤
L/2
N
P
T
x
1200
1
−
=
−
=
Nm
PL
M
M
Px
M
L
x
x
x
2100
2
;
0
;
2
/
0
1
2
1
1
−
=
−
=
=
−
=
=
=
W przedziale L/2
≤
x
2
≤
3/2 L
−
−
+
−
=
2
2
2
L
x
q
R
P
T
A
x
N
T
N
T
L
x
L
x
2150
;
3850
2
/
3
2
/
2
2
−
=
=
=
=
Jak wida
ć
z wykresu na rys.31 siła poprzeczna zmieniła swój znak co oznacza,
ż
e
w tym miejscu zerowym (dla równania siły poprzecznej) wyst
ę
puje ekstremum funk-
cji.
Opracowanie Instytut Spawalnictwa - Gliwice.
Wszelkie prawa zastrze
żone. Powielanie lub rozpowszechnianie ca
ło
ści wzgl
ędnie
fragmentu w jakiejkolwiek formie i w jakikolwiek sposób jest zabronione.
KURS MIĘDZYNARODOWEGO
INŻYNIERA / TECHNOLOGA / MISTRZA / INSTRUKTORA SPAWALNIKA
(IWE/IWT/IWS/IWP)
Podstawy teorii układów konstrukcji
Instytut
Spawalnictwa
w Gliwicach
3.1
AW 20
22
i dalej
po rozwi
ą
zaniu równania kwadratowego równania momentów gn
ą
cych w drugim
przedziale i wyznaczeniu jego pierwiastka dodatniego znajduj
ą
cego si
ę
w tym prze-
dziale przekrój wyst
ę
powania maksymalnej warto
ś
ci momentu gn
ą
cego. Przekrój ten
znajduje si
ę
w odległo
ś
ci 2,73 m od pocz
ą
tku układu współrz
ę
dnych.
W przedziale 3/2 L
≤
x
3
≤
2 L
W tym przedziale moment gn
ą
cy przyjmie stał
ą
warto
ść
1000 Nm.
7.2 Napr
ęż
enia przy zginaniu
Przy obci
ąż
enia poprzecznych i momentach skupionych w przekrojach belek
wyst
ą
pi
ą
siły wewn
ę
trzne normalne (momenty gn
ą
ce) styczne (
ś
cinaj
ą
ce). I tutaj siły
wewn
ę
trzne odniesione do przekroju okre
ś
l
ą
stany napr
ęż
e
ń
. Przy zało
ż
eniu płaskich
przekrojów tzn. takich, które pod działaniem sił nie b
ę
d
ą
odkształca
ć
si
ę
w kierunku
prostopadłym. W konsekwencji w przekrojach prostopadłych do osi wzdłu
ż
nej belki
wyst
ą
pi
ą
zró
ż
nicowane napr
ęż
enia. Zjawisko zginania zilustrowano na rys. 23.
Rys. 32 Zginanie belki
Na rys. 32 przedstawiono belk
ę
, na której naniesiono siatk
ę
. Po jej obci
ąż
eniu na
ko
ń
cach momentami M
g
. Odkształcenie pr
ę
ta ujawni si
ę
w postaci zakrzywienia
uprzednio naznaczonych linii podłu
ż
nych i jego osi. Linie prostopadłe do osi b-b i c-c
po odkształceniu zajm
ą
pozycj
ę
b’-b’ i c’-c’ i pozostan
ą
dalej proste , a kontury prze-
krojów nadal płaskie co potwierdzi zasad
ę
płaskich przekrojów. Odkształcenie belki
przedstawione na rys. 32 ujawnia jeszcze jedn
ą
cech
ę
: Istnieje warstwa, która nie
została odkształcona pod wpływem obci
ąż
enia. Jest to warstwa oboj
ę
tna. Je
ś
li w
my
ś
li podzielimy belk
ę
na podłu
ż
ne elementy , które nazwiemy włóknami, to zauwa-
ż
ymy,
ż
e po stronie wkl
ę
słej uległy one skróceniu, a po stronie wypukłej wydłu
ż
eniu.
Przy takich obserwacjach mo
ż
na zało
ż
y
ć
warunki geometryczne (rys.33).
Opracowanie Instytut Spawalnictwa - Gliwice.
Wszelkie prawa zastrze
żone. Powielanie lub rozpowszechnianie ca
ło
ści wzgl
ędnie
fragmentu w jakiejkolwiek formie i w jakikolwiek sposób jest zabronione.
KURS MIĘDZYNARODOWEGO
INŻYNIERA / TECHNOLOGA / MISTRZA / INSTRUKTORA SPAWALNIKA
(IWE/IWT/IWS/IWP)
Podstawy teorii układów konstrukcji
3.1
Instytut
Spawalnictwa
w Gliwicach
AW 21
23
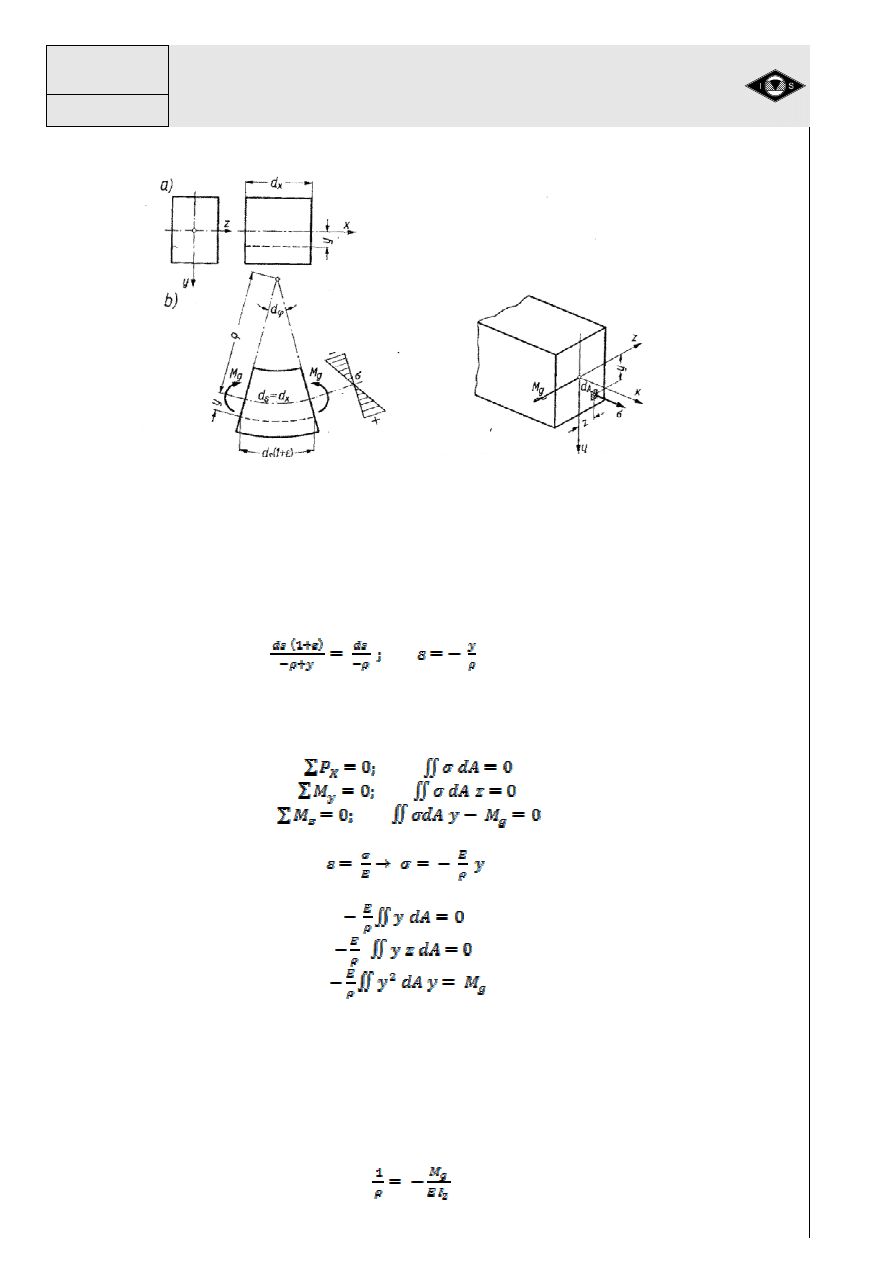
Rys. 33 Warunki geometryczne zginania
Element belki przed odkształceniem o długo
ś
ci dx ma przekrój poprzeczny jak na
rys.33. Po przyło
ż
eniu momentu gn
ą
cego nast
ą
pi jego ugi
ę
cie. We
ź
my pod uwag
ę
włókno odległe od warstwy oboj
ę
tnej o y, długo
ść
którego wynosiła dx = ds, by po
odkształceniu osi
ą
gn
ąć
długo
ść
ds(1+
ε
), gdzie
ε
jest wydłu
ż
eniem wzgl
ę
dnym (rys.
33 b).
(20)
Siły zewn
ę
trzne działaj
ą
ce na cz
ęść
belki po jednej stronie przekroju redukuj
ą
si
ę
do
momentu –M
g
. Uwzgl
ę
dniaj
ą
c wewn
ę
trzne siły elementarne
σ
Da tworz
ą
ce prze-
strzenny układ sił równoległych mo
ż
emy dla odci
ę
tej cz
ęś
ci belki napisa
ć
nast
ę
puj
ą
-
ce warunki równowagi (rys. 33c).
(21)
(22)
(23)
Zakładaj
ą
c ugi
ę
cie spr
ęż
yste jako warunek fizyczny przyjmujemy prawo Hooke’a
(24)
Podstawiaj
ą
c do poprzednich trzech równa
ń
otrzymamy:
(25)
(26)
(27)
Z równania (25) wynika,
ż
e moment statyczny wzgl
ę
dem osin oboj
ę
tnej z jest równy
zeru tzn.,
ż
e o
ś
oboj
ę
tna przekroju przechodzi przez
ś
rodek ci
ęż
ko
ś
ci przekroju. Z
równania (26) wynika,
ż
e moment dewiacji wzgl
ę
dem osi z jest równy zero, co ozna-
cza,
ż
e je
ś
li kierunek wektora M
g
(rys.33) b
ę
dzie pokrywał si
ę
z kierunkiem jednej z
osi centralnych przekroju to wyst
ą
pi zginanie proste. Z kolei równanie (27) pozwala
ustali
ć
podstawow
ą
zale
ż
no
ść
pomi
ę
dzy krzywizn
ą
, momentem gn
ą
cym i napr
ęż
e-
niami. Przyjmuj
ą
c,
ż
e podcałkowe wyra
ż
enie w tym równaniu jest momentem bez-
władno
ś
ci przekroju otrzymamy t
ą
zale
ż
no
ść
w postaci:
(28)
Wykorzystuj
ą
c zale
ż
no
ść
(24) otrzymamy:
c)
Opracowanie Instytut Spawalnictwa - Gliwice.
Wszelkie prawa zastrze
żone. Powielanie lub rozpowszechnianie ca
ło
ści wzgl
ędnie
fragmentu w jakiejkolwiek formie i w jakikolwiek sposób jest zabronione.
KURS MIĘDZYNARODOWEGO
INŻYNIERA / TECHNOLOGA / MISTRZA / INSTRUKTORA SPAWALNIKA
(IWE/IWT/IWS/IWP)
Podstawy teorii układów konstrukcji
Instytut
Spawalnictwa
w Gliwicach
3.1
AW 22
24
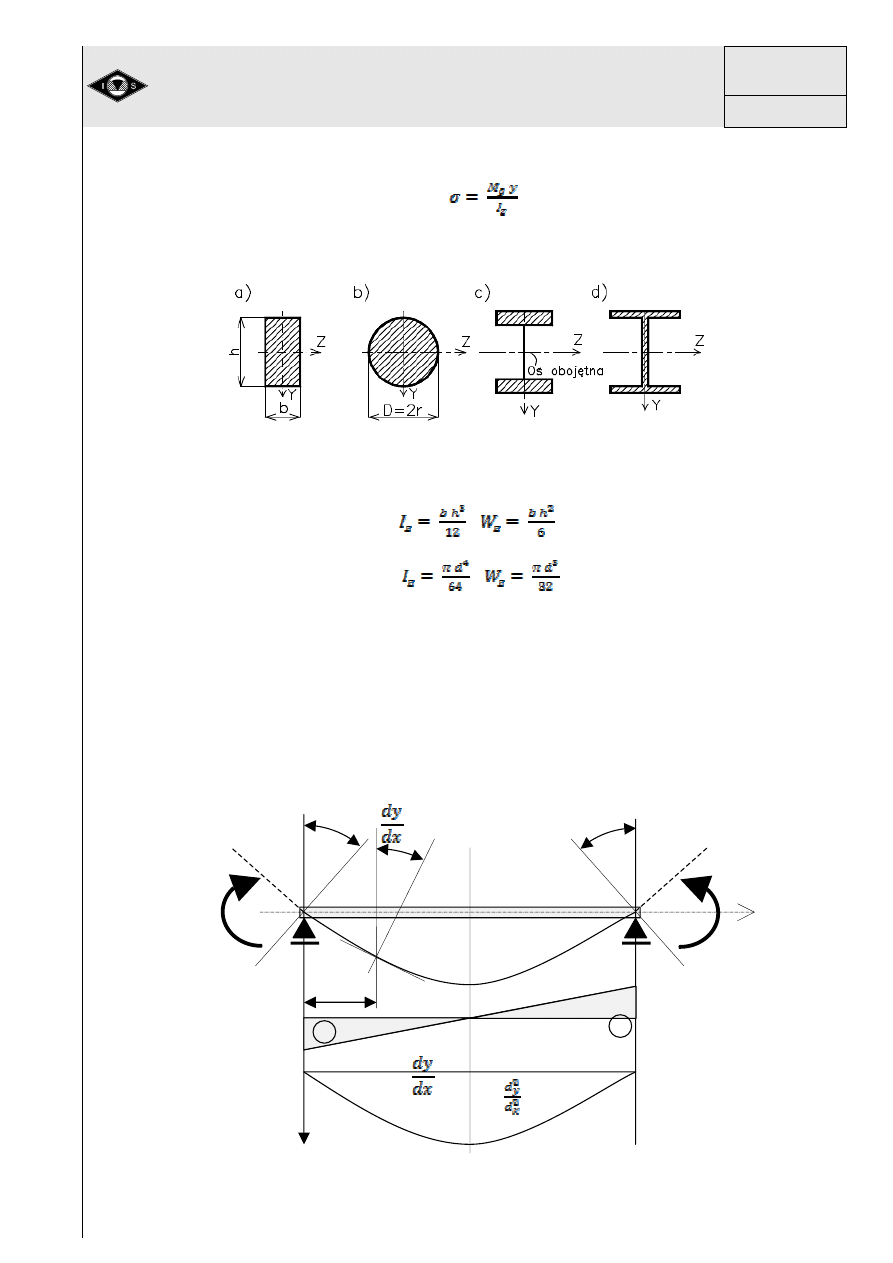
(29)
Wielko
ść
I
z
/y nazywa si
ę
wska
ź
nikiem wytrzymało
ś
ci na zginanie W
z
.
Rys. 34 Podstawowe przekroje figur płaskich
Dla prostok
ą
ta
;
(30)
Dla koła
;
(31)
7.3 Odkształcenia belek
Odkształceniami belki s
ą
:
– ugi
ę
cie belki y, zdefiniowane jako pionowe przemieszczenie
ś
rodka ci
ęż
ko
ś
ci prze-
kroju poprzecznego belki,
– k
ą
t obrotu przekroju dx/dy = tg
Θ
≈
Θ
zdefiniowany jako k
ą
t obrotu normalnej do
przekroju poprzecznego belki lub ze wzgl
ę
dów praktycznych – prostopadłej do nor-
malnej.
Rys.35 Schemat ugi
ę
cia belki
A
B
+
-
M
M
Θ
Θ
y
x
x
y
Θ
< 0
Θ
> 0
linia ugi
ę
cia
K
ą
t obrotu przekroju
poprzecznego belki
Opracowanie Instytut Spawalnictwa - Gliwice.
Wszelkie prawa zastrze
żone. Powielanie lub rozpowszechnianie ca
ło
ści wzgl
ędnie
fragmentu w jakiejkolwiek formie i w jakikolwiek sposób jest zabronione.
KURS MIĘDZYNARODOWEGO
INŻYNIERA / TECHNOLOGA / MISTRZA / INSTRUKTORA SPAWALNIKA
(IWE/IWT/IWS/IWP)
Podstawy teorii układów konstrukcji
3.1
Instytut
Spawalnictwa
w Gliwicach
AW 23
25
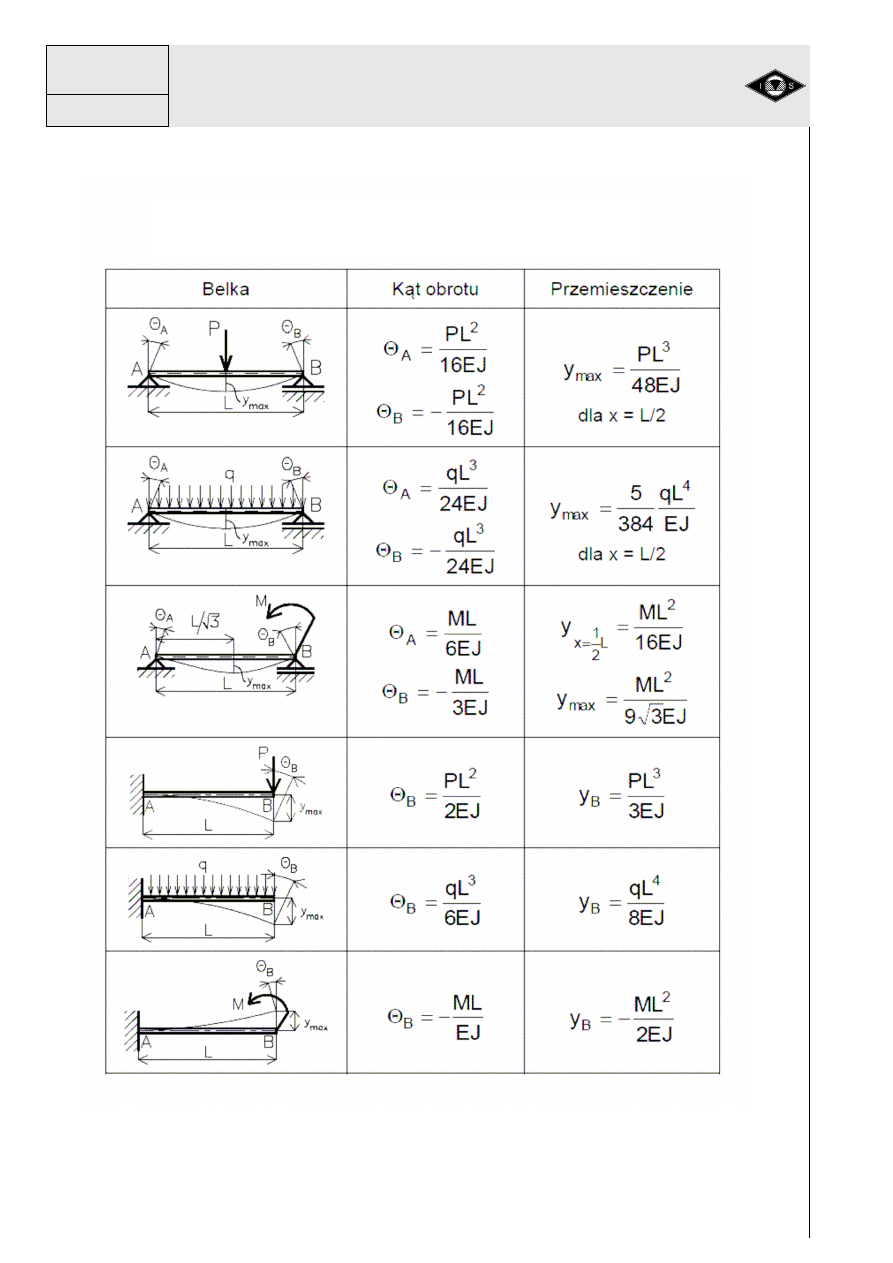
Tablica 1 Przemieszczenia prostych belek
Opracowanie Instytut Spawalnictwa - Gliwice.
Wszelkie prawa zastrze
żone. Powielanie lub rozpowszechnianie ca
ło
ści wzgl
ędnie
fragmentu w jakiejkolwiek formie i w jakikolwiek sposób jest zabronione.
KURS MIĘDZYNARODOWEGO
INŻYNIERA / TECHNOLOGA / MISTRZA / INSTRUKTORA SPAWALNIKA
(IWE/IWT/IWS/IWP)
Podstawy teorii układów konstrukcji
Instytut
Spawalnictwa
w Gliwicach
3.1
AW 24
26
Obliczanie odkształce
ń
belek mo
ż
liwe jest za pomoc
ą
metody całkowania tzw. rów-
nania ró
ż
niczkowego linii ugi
ę
cia belki. Metoda ta pozwala na wyznaczanie ugi
ę
cia
oraz kata obrotu w dowolnym przekroju x. W praktyce in
ż
ynierskiej stosowane s
ą
równie
ż
uproszczone metody wyznaczania odkształce
ń
belek. Jedn
ą
z metod jest
metoda superpozycji
.
Metoda superpozycji pozwala wyznacza
ć
odkształcenia tylko w
wybranych punktach (np. poparcia, ko
ń
ce belki). Dla szybkiego stosowania metody
nale
ż
y korzysta
ć
z gotowych rozwi
ą
za
ń
dla podstawowych typów prostych belek
(patrz tabela).
Przykład 11
Dla belki przedstawionej na rys. 36 obliczy
ć
ugi
ę
cie i k
ą
t obrotu punktu C.
Przyj
ąć
: P = 40 kN, q = 2,5 kN/m, EJ = 50 MNm2.
Aby zastosowa
ć
metod
ę
superpozycji, nale
ż
y rozdzieli
ć
obci
ąż
enia na sił
ę
skupion
ą
P oraz obci
ąż
enia ci
ą
głe q. Poniewa
ż
q działa na cz
ęś
ci cz
ęść
belki znajduj
ą
cej si
ę
poza podporami, nale
ż
y uwzgl
ę
dni
ć
moment M oddziałuj
ą
cy na AB.
Rys. 36 Przykład belki zło
ż
onej
1. Belka obci
ąż
ona sił
ą
P:
2. Belka obci
ąż
ona sił
ą
równomiernie rozło
ż
on
ą
q
2a. Odkształcenie prz
ę
sła AB:
2b. Odkształcenie wspornika BC:
Całkowite ugi
ę
cie ko
ń
ca C:
Opracowanie Instytut Spawalnictwa - Gliwice.
Wszelkie prawa zastrze
żone. Powielanie lub rozpowszechnianie ca
ło
ści wzgl
ędnie
fragmentu w jakiejkolwiek formie i w jakikolwiek sposób jest zabronione.
KURS MIĘDZYNARODOWEGO
INŻYNIERA / TECHNOLOGA / MISTRZA / INSTRUKTORA SPAWALNIKA
(IWE/IWT/IWS/IWP)
Podstawy teorii układów konstrukcji
3.1
Instytut
Spawalnictwa
w Gliwicach
AW 25
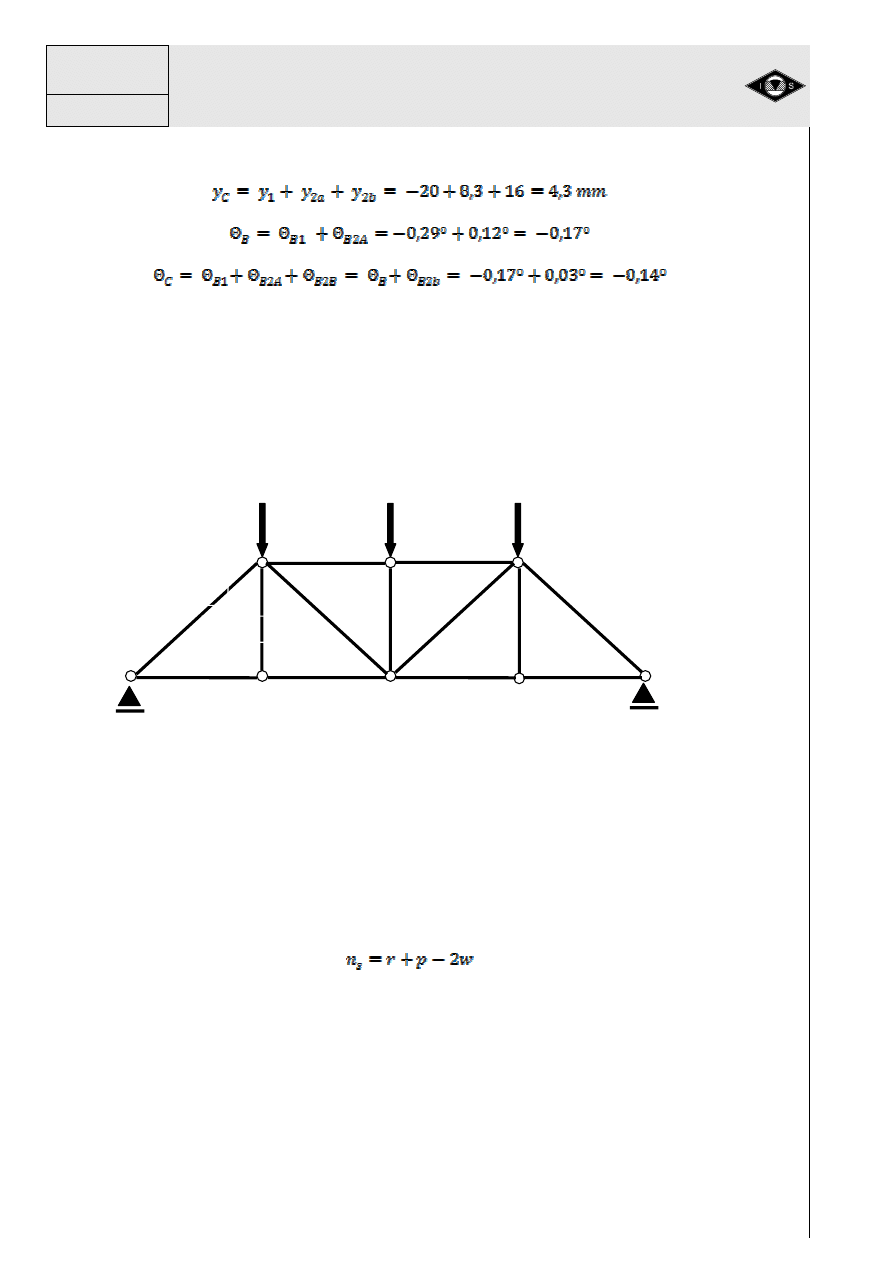
27
K
ą
t obrotu belki na podporze B:
K
ą
t obrotu przekroju belki na ko
ń
cu C:
8. Kratownice
Kratownic
ą
nazywamy układ zło
ż
ony z pr
ę
tów prostych, poł
ą
czonych mi
ę
dzy sob
ą
w w
ę
złach przegubowo (przegubami bez tarcia), obci
ąż
ony siłami skupionymi w
przegubach;
siły przekrojowe w pr
ę
tach kratownicy redukuj
ą
si
ę
do stałej siły podłu
ż
nej.
Rys. 37 Kratownica
Obci
ąż
enia zewn
ę
trzne przekazuje si
ę
na kratownice w postaci sił skupionych
przyło
ż
onych w jej w
ę
złach i działaj
ą
cych w płaszczy
ź
nie kratownicy (w przypadku
kratownic płaskich). Równie
ż
ci
ęż
ar własny kratownicy zast
ę
puje si
ę
siłami skupio-
nymi, zredukowanych i przyło
ż
onych w jej w
ę
złach.
Sprawdzenie stopnia statycznej niewyznaczalno
ś
ci kratownicy
Sprawdzenie stopnia statycznej wyznaczalno
ś
ci kratownicy dokonujemy wzorem
gdzie: n
s
– stopie
ń
statycznej niewyznaczalno
ś
ci,
r – liczba pr
ę
tów reakcyjnych (reakcji podporowych),
p – liczba pr
ę
tów prostych kratownicy,
w – liczba w
ę
złów kratownicy.
Dla kratownicy przedstawionej na rys. 37 stopie
ń
ten wynosi
n
s
= 3 + 13 + - 2 * 8 = 0
gdzie
r = 3, p = 13 (4 pr
ę
ty pasa górnego, 4 pr
ę
ty pasa dolnego, 3 słupki, 2 krzy
ż
ul-
ce), w = 8.
Pr
ę
ty zerowe
W kratownicy mog
ą
wyst
ę
powa
ć
pr
ę
ty, w których pod danym obci
ąż
eniem siły
Pas górny
Pas dolny
Krzy
ż
ulec
Słupek
A
B
(32)
Opracowanie Instytut Spawalnictwa - Gliwice.
Wszelkie prawa zastrze
żone. Powielanie lub rozpowszechnianie ca
ło
ści wzgl
ędnie
fragmentu w jakiejkolwiek formie i w jakikolwiek sposób jest zabronione.
KURS MIĘDZYNARODOWEGO
INŻYNIERA / TECHNOLOGA / MISTRZA / INSTRUKTORA SPAWALNIKA
(IWE/IWT/IWS/IWP)
Podstawy teorii układów konstrukcji
Instytut
Spawalnictwa
w Gliwicach
3.1
AW 26
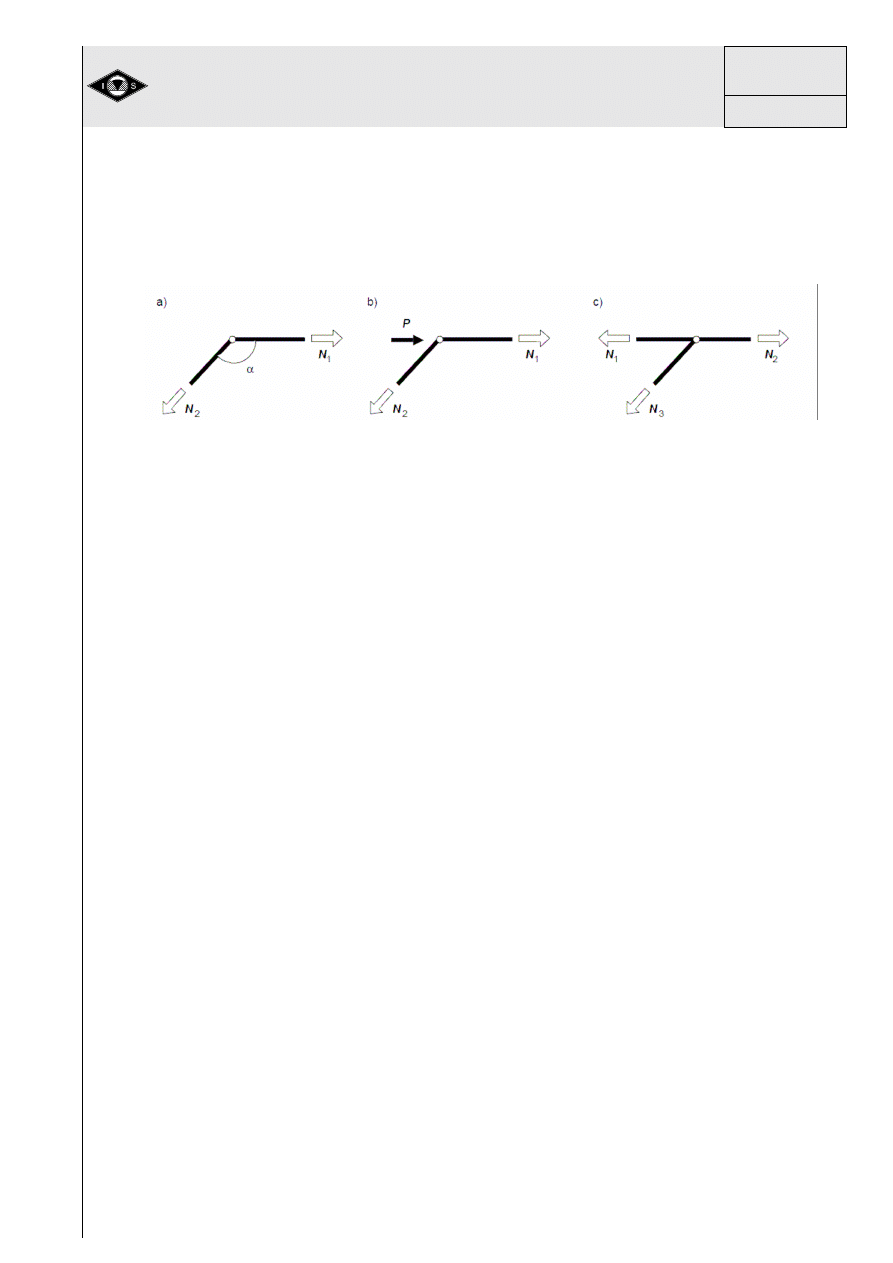
28
podłu
ż
ne s
ą
równe zero, pr
ę
ty te nazywamy pr
ę
tami zerowymi.
Zasady okre
ś
lania tych pr
ę
tów s
ą
nast
ę
puj
ą
ce:
a) je
ś
li w w
ęź
le schodz
ą
si
ę
dwa pr
ę
ty pod pewnym k
ą
tem a i w
ę
zeł jest nieob-
ci
ąż
ony sił
ą
zewn
ę
trzn
ą
, to siły przekrojowe w obu pr
ę
tach s
ą
równe zeru (rys.
38 a),
Rys. 38 Pr
ę
ty zerowe
b) je
ś
li w w
ęź
le schodz
ą
si
ę
dwa pr
ę
ty i w
ę
zeł jest obci
ąż
ony sił
ą
zewn
ę
trzn
ą
,
równoległa do jednego z nich, to w drugim pr
ę
cie siła przekrojowa jest równa
zero (rys. 38 b),
c) je
ś
li w w
ęź
le schodz
ą
si
ę
trzy pr
ę
ty, z których dwa s
ą
równoległe i w
ę
zeł jest
nieobci
ąż
ony sił
ą
zewn
ę
trzn
ą
, to siła przekrojowa w pr
ę
cie trzecim jest równa ze-
ro (rys. 38 c).
8.1 Metody rozwi
ą
zywania kratownic
Metody rozwi
ą
zywania kratownic
- analityczne
- metoda równowa
ż
enia w
ę
złów
- plan sił Cremony
- metoda Rittera
- metoda Culmanna
8.1.1. Metoda równowa
ż
enia w
ę
złów
Metoda ta polega na wypisywaniu równa
ń
równowagi dla ka
ż
dego my
ś
lowo
wyci
ę
tego w
ę
zła kratownicy.
Post
ę
powanie:
1) Z równa
ń
równowagi wyznaczenie składowych reakcji podporowych,
2) W poszczególnych my
ś
lowo wyci
ę
tych w
ę
złach kratownicy zapisuje si
ę
dwa rów-
nania
równowagi:
Σ
P
ix
= 0,
Σ
P
iy
= 0. W tym celu w w
ęź
le zakłada si
ę
odpowiednie zwroty sił
w poszczególnych pr
ę
tach,
3) Z zapisanych równa
ń
równowagi wyznacza si
ę
siły we wszystkich pr
ę
tach kratow-
nicy. Rozwi
ą
zywanie najlepiej zacz
ąć
od w
ę
zła, w którym zbiegaj
ą
si
ę
tylko dwa pr
ę
-
ty o nieznanych siłach, a nast
ę
pnie rozpatrywa
ć
kolejne w
ę
zły spełniaj
ą
ce ten waru-
nek.
8.1.2 Metoda Rittera (metoda przekrojów)
Metoda Rittera, podobnie jak metoda równowa
ż
enia w
ę
złów jest sposobem anali-
tycznym, polega ona na wykorzystaniu twierdzenia o równowadze układu sił ze-
wn
ę
trznych i wewn
ę
trznych przyło
ż
onych do jednej cz
ęś
ci kratownicy. Analitycznych
Opracowanie Instytut Spawalnictwa - Gliwice.
Wszelkie prawa zastrze
żone. Powielanie lub rozpowszechnianie ca
ło
ści wzgl
ędnie
fragmentu w jakiejkolwiek formie i w jakikolwiek sposób jest zabronione.
KURS MIĘDZYNARODOWEGO
INŻYNIERA / TECHNOLOGA / MISTRZA / INSTRUKTORA SPAWALNIKA
(IWE/IWT/IWS/IWP)
Podstawy teorii układów konstrukcji
3.1
Instytut
Spawalnictwa
w Gliwicach
AW 27
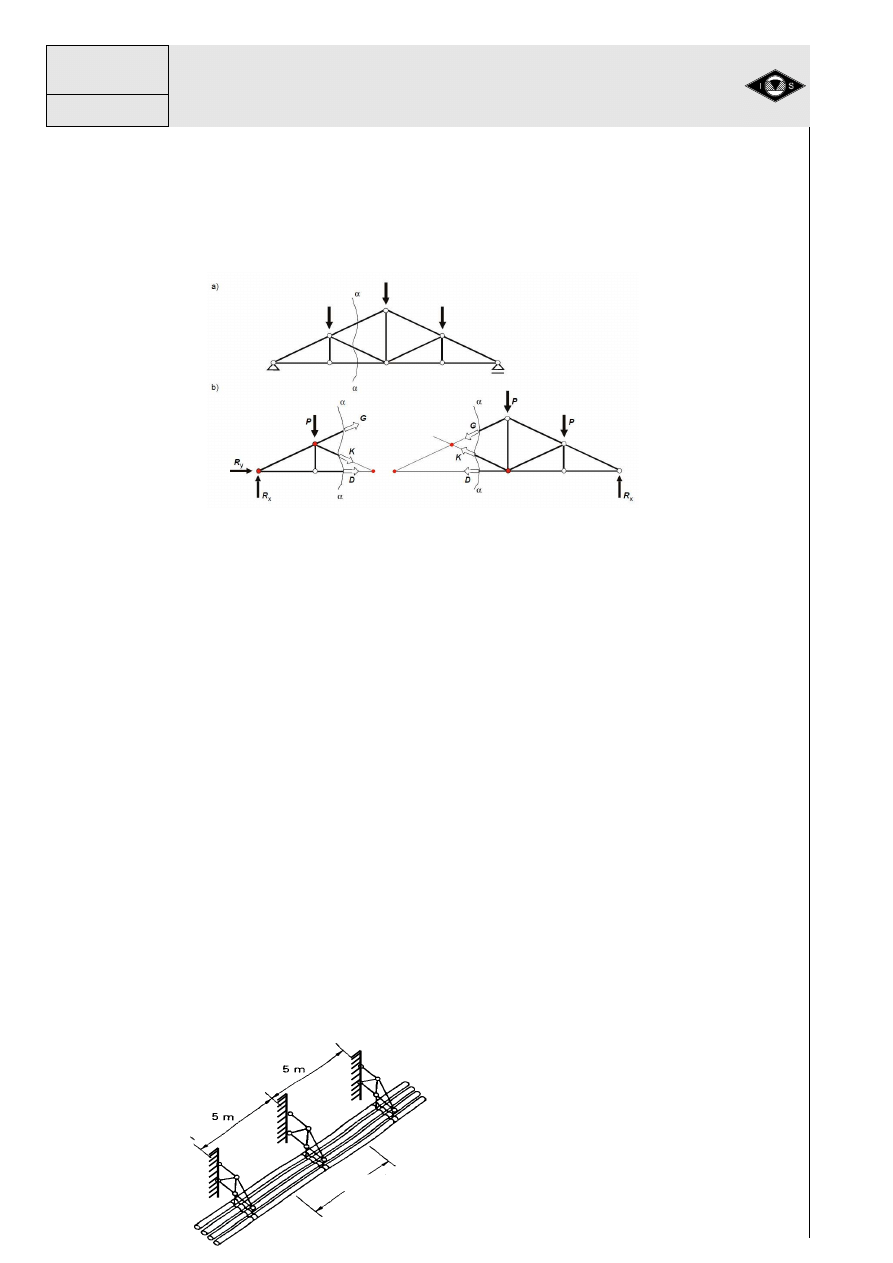
29
równa
ń
równowagi mamy trzy, je
ś
li wi
ę
c kratownice przetniemy przez nie wi
ę
cej ni
ż
trzy pr
ę
ty, to z równa
ń
równowagi mo
ż
emy wyliczy
ć
szukane siły przekrojowe. Meto-
da ta jest wygodniejsza w przypadku, je
ś
li poszukiwane s
ą
siły w konkretnych pr
ę
-
tach kratownicy (rys. 39).
Rys. 39 Metoda Rittera wyznaczania sił w pr
ę
tach
Post
ę
powanie:
1) Z równa
ń
równowagi wyznaczenie składowych reakcji podporowych,
2) Przeprowadza si
ę
przekrój a-a przez trzy pr
ę
ty kratownicy nie zbiegaj
ą
ce si
ę
w
jednym punkcie, w tym przez pr
ę
t (lub pr
ę
ty), w których sił
ę
chcemy wyznaczy
ć
.
Cz
ęść
kratownicy oddzielona przekrojem a-a znajduje si
ę
w równowadze pod działa-
niem sił zewn
ę
trznych, składowych reakcji podpór oraz sił w pr
ę
tach, przez które po-
prowadzono przekrój (rys. 39 b),
3) W odniesieniu do wydzielonej cz
ęś
ci kratownicy zapisuje si
ę
równania sumy mo-
mentów wszystkich sił wzgl
ę
dem trzech punktów, w których przecinaj
ą
si
ę
parami
kierunki poszukiwanych sił w pr
ę
tach. Punkty te s
ą
nazywane punktami Rittera. Je
ś
li
dwa z pr
ę
tów, przez które poprowadzono przekrój, s
ą
do siebie równoległe, to zapi-
suje si
ę
dwa równania sumy momentów wszystkich sił działaj
ą
cych na dan
ą
cz
ęść
kratownicy wzgl
ę
dem punktów, w których trzeci pr
ę
t przecina si
ę
z pr
ę
tami równole-
głymi, oraz trzecie równanie sumy rzutów wszystkich sił na o
ś
prostopadł
ą
do pr
ę
tów
równoległych.
Przykład 12
1. Okre
ś
li
ć
, które pr
ę
ty kratownicy słu
żą
cej do podwieszenia rur instalacji chemicz-
nej s
ą
rozci
ą
gane, a które
ś
ciskane.
2. Okre
ś
li
ć
siły wyst
ę
puj
ą
ce w pr
ę
tach kratownicy, je
ś
li całkowity ci
ęż
ar rur wynosi
3.8 [kN/m].
Rys. 40 Konstrukcja kratowa
podwieszenia zespołu rur
5 m
Opracowanie Instytut Spawalnictwa - Gliwice.
Wszelkie prawa zastrze
żone. Powielanie lub rozpowszechnianie ca
ło
ści wzgl
ędnie
fragmentu w jakiejkolwiek formie i w jakikolwiek sposób jest zabronione.
KURS MIĘDZYNARODOWEGO
INŻYNIERA / TECHNOLOGA / MISTRZA / INSTRUKTORA SPAWALNIKA
(IWE/IWT/IWS/IWP)
Podstawy teorii układów konstrukcji
Instytut
Spawalnictwa
w Gliwicach
3.1
AW 28
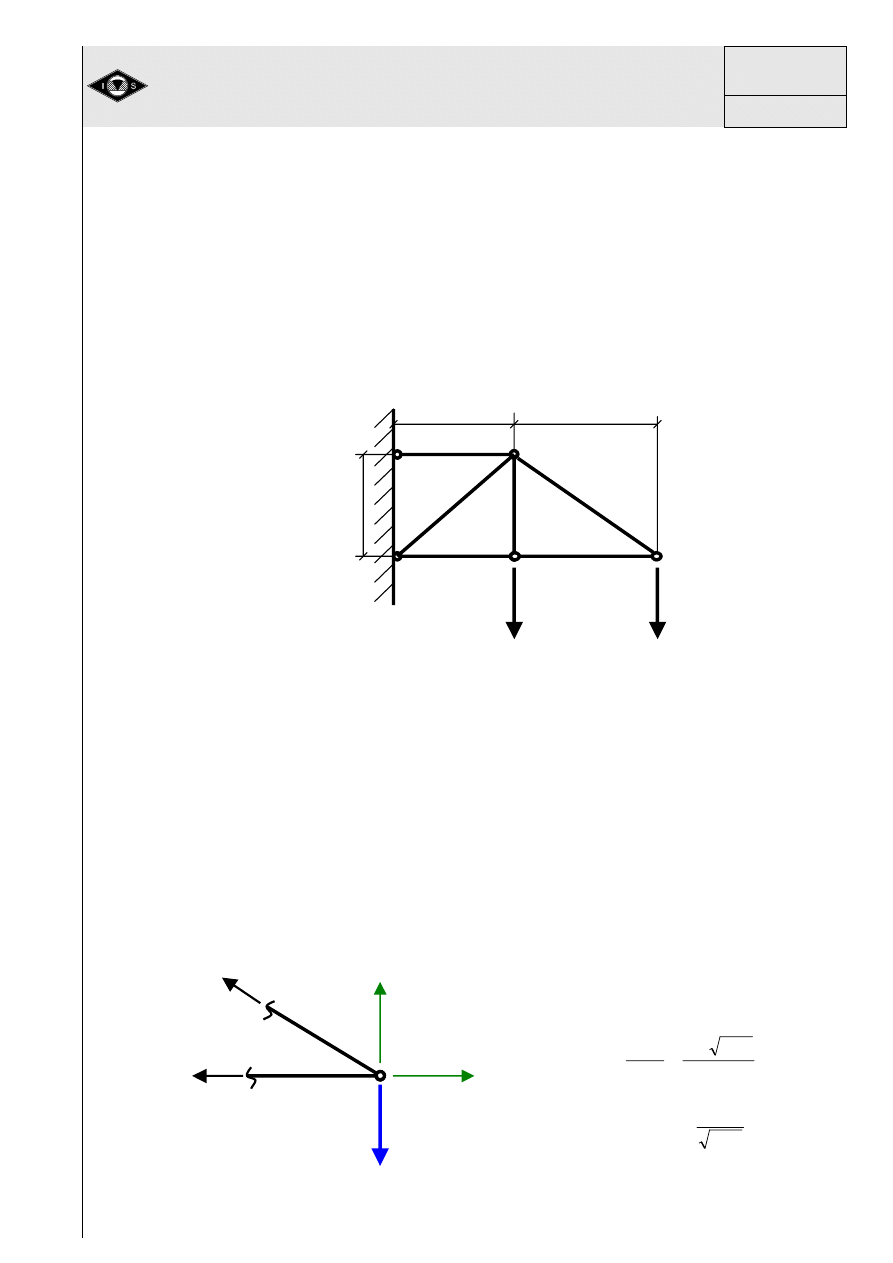
30
Rozwi
ą
zanie
−
Całkowite obci
ąż
enie na jedn
ą
kratownic
ę
:
]
[
19
]
/
[
8
.
3
]
[
5
kN
m
kN
m
P
r
=
⋅
=
−
Obci
ąż
enie jednego w
ę
zła
]
[
5
.
9
2
/
19
2
/
kN
P
P
r
w
=
=
=
−
Uwzgl
ę
dniaj
ą
c ci
ęż
ar kratownicy przyjmiemy ostatecznie obci
ąż
enie w w
ęź
le
]
[
10 kN
P
=
−
Schemat statyczny kratownicy
Rys. 41 Schemat statyczny kratownicy
Warunek statycznej (wewn
ę
trznej) wyznaczalno
ś
ci:
3
2
−
=
w
p
P
L
p
w
=
−
⋅
=
=
+
=
=
3
5
2
7
7
1
6
5
Metoda równowa
ż
enia w
ę
zła
Warunek równowagi w
ę
zła E
]
kN
[
18
1
25
.
3
10
sin
0
sin
0
0
cos
0
=
⋅
=
=
=
+
−
=
=
−
−
=
∑
∑
α
α
α
P
F
F
P
P
F
F
P
EC
EC
iy
EC
ED
ix
- pr
ę
t rozci
ą
gany
[kN]
15
25
.
3
5
.
1
18
cos
−
=
⋅
−
=
−
=
α
EC
ED
F
F
- pr
ę
t
ś
ciskany
Rys. 42 Rozkład sił w w
ęź
le E
A
B
C
D
E
P
P
1.2[m]
1.5[m]
1.0[m]
F
ED
F
EC
E
P=10[kN]
α
y
x
Opracowanie Instytut Spawalnictwa - Gliwice.
Wszelkie prawa zastrze
żone. Powielanie lub rozpowszechnianie ca
ło
ści wzgl
ędnie
fragmentu w jakiejkolwiek formie i w jakikolwiek sposób jest zabronione.
KURS MIĘDZYNARODOWEGO
INŻYNIERA / TECHNOLOGA / MISTRZA / INSTRUKTORA SPAWALNIKA
(IWE/IWT/IWS/IWP)
Podstawy teorii układów konstrukcji
3.1
Instytut
Spawalnictwa
w Gliwicach
AW 29
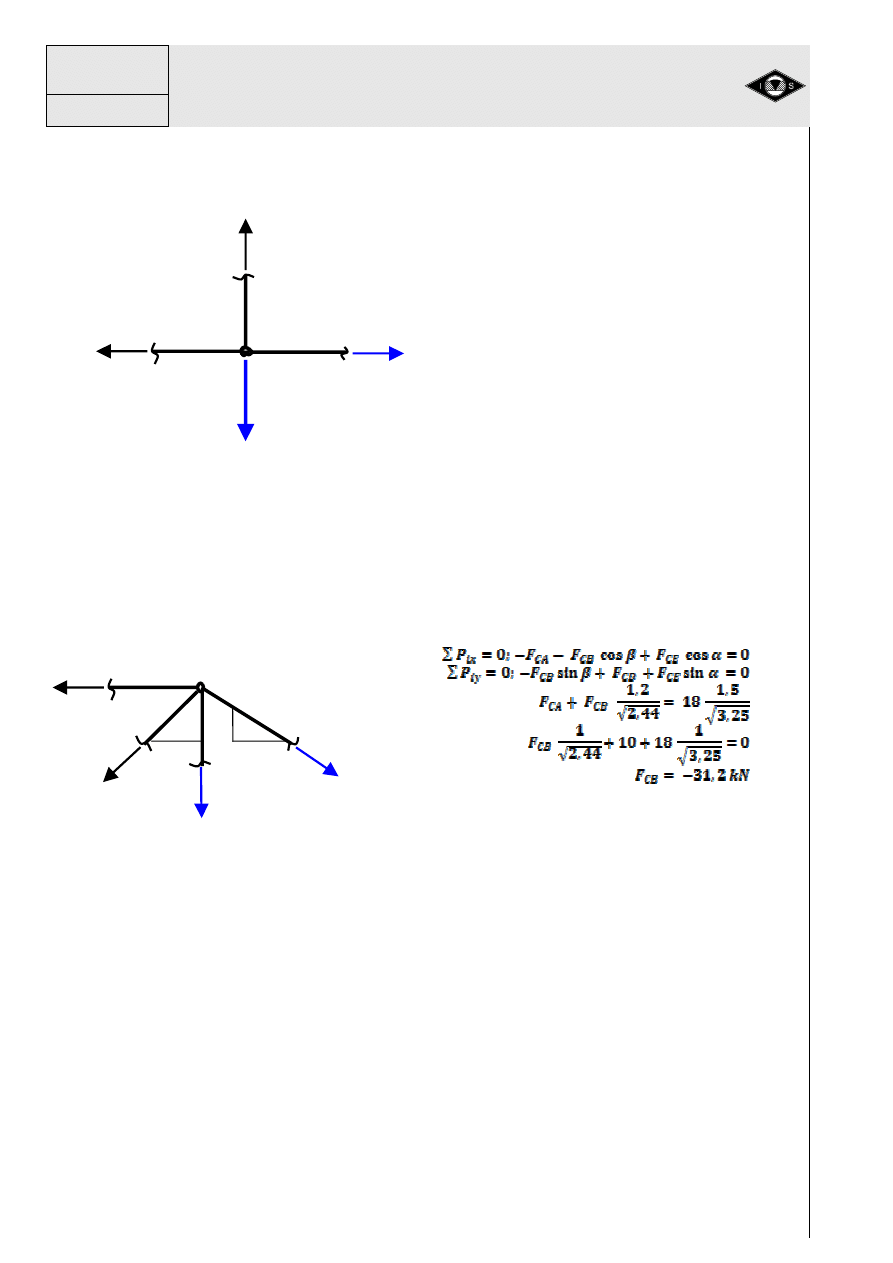
31
Warunek równowagi w
ę
zła D
- pr
ę
t
ś
ciskany
[kN]
10
=
=
P
F
CD
- pr
ę
t rozci
ą
gany
Rys. 43 Rozkład sił w
ęź
le D
Warunek równowagi w
ę
zła C
- pr
ę
t
ś
ciskany
[kN]
9
.
38
=
CA
F
- pr
ę
t rozci
ą
gany
Rozkład sił w w
ęź
le C
[kN]
15
0
0
0
0
−
=
=
=
+
−
=
=
−
=
∑
∑
DB
DB
DC
iy
DB
DE
ix
F
F
F
P
P
F
F
P
P=10[kN]
F
DB
D
F
DC
F
DE
= -15[kN]
F
CA
C
F
CB
F
CE
= 18 [kN]
F
CD
= 10[kN]
α
β
Opracowanie Instytut Spawalnictwa - Gliwice.
Wszelkie prawa zastrze
żone. Powielanie lub rozpowszechnianie ca
ło
ści wzgl
ędnie
fragmentu w jakiejkolwiek formie i w jakikolwiek sposób jest zabronione.
KURS MIĘDZYNARODOWEGO
INŻYNIERA / TECHNOLOGA / MISTRZA / INSTRUKTORA SPAWALNIKA
(IWE/IWT/IWS/IWP)
Podstawy teorii układów konstrukcji
Instytut
Spawalnictwa
w Gliwicach
3.1
AW 30
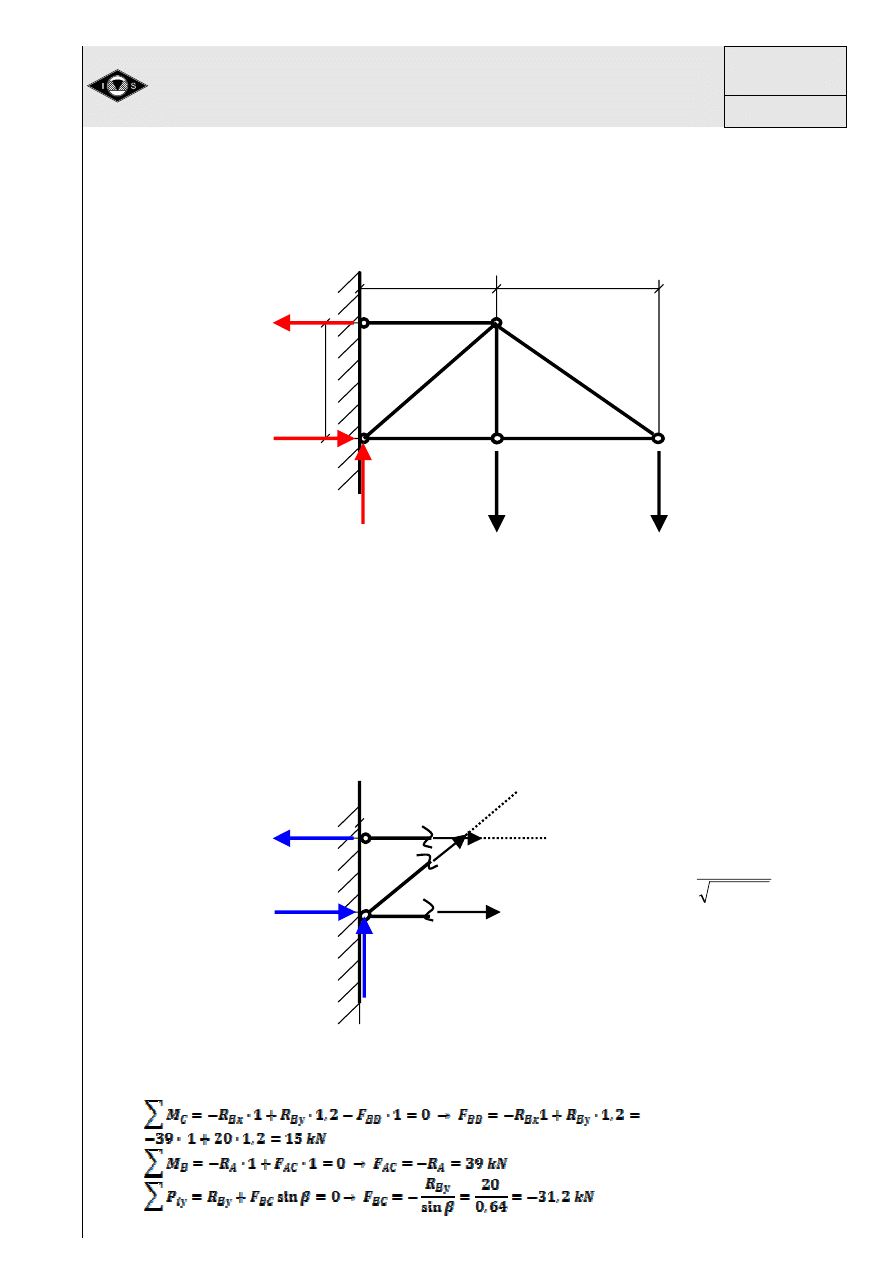
32
Metoda Rittera
1. Równania równowagi
Rys. 45 Reakcje w podporach kratownicy
]
[
39
0
]
[
20
0
]
[
39
0
kN
R
R
M
kN
R
P
kN
R
P
A
Bx
B
By
iy
A
ix
≈
=
=
=
=
≈
=
∑
∑
∑
2. Przeci
ę
cie przez trzy pr
ę
ty nie przechodz
ą
ce przez jeden punkt
64
.
0
1
2
.
1
1
sin
2
2
=
+
=
β
Rys. 46. Przeci
ę
cie pr
ę
tów dla celów metody Rittera
A
R
A
R
Bx
F
AC
F
BC
C
B
R
By
F
BD
B
β
A
B
C
D
E
P
P
1.2[m]
1.5[m]
1.0[m]
R
A
R
Bx
R
By
Opracowanie Instytut Spawalnictwa - Gliwice.
Wszelkie prawa zastrze
żone. Powielanie lub rozpowszechnianie ca
ło
ści wzgl
ędnie
fragmentu w jakiejkolwiek formie i w jakikolwiek sposób jest zabronione.
KURS MIĘDZYNARODOWEGO
INŻYNIERA / TECHNOLOGA / MISTRZA / INSTRUKTORA SPAWALNIKA
(IWE/IWT/IWS/IWP)
Podstawy teorii układów konstrukcji
3.1
Instytut
Spawalnictwa
w Gliwicach
AW 31
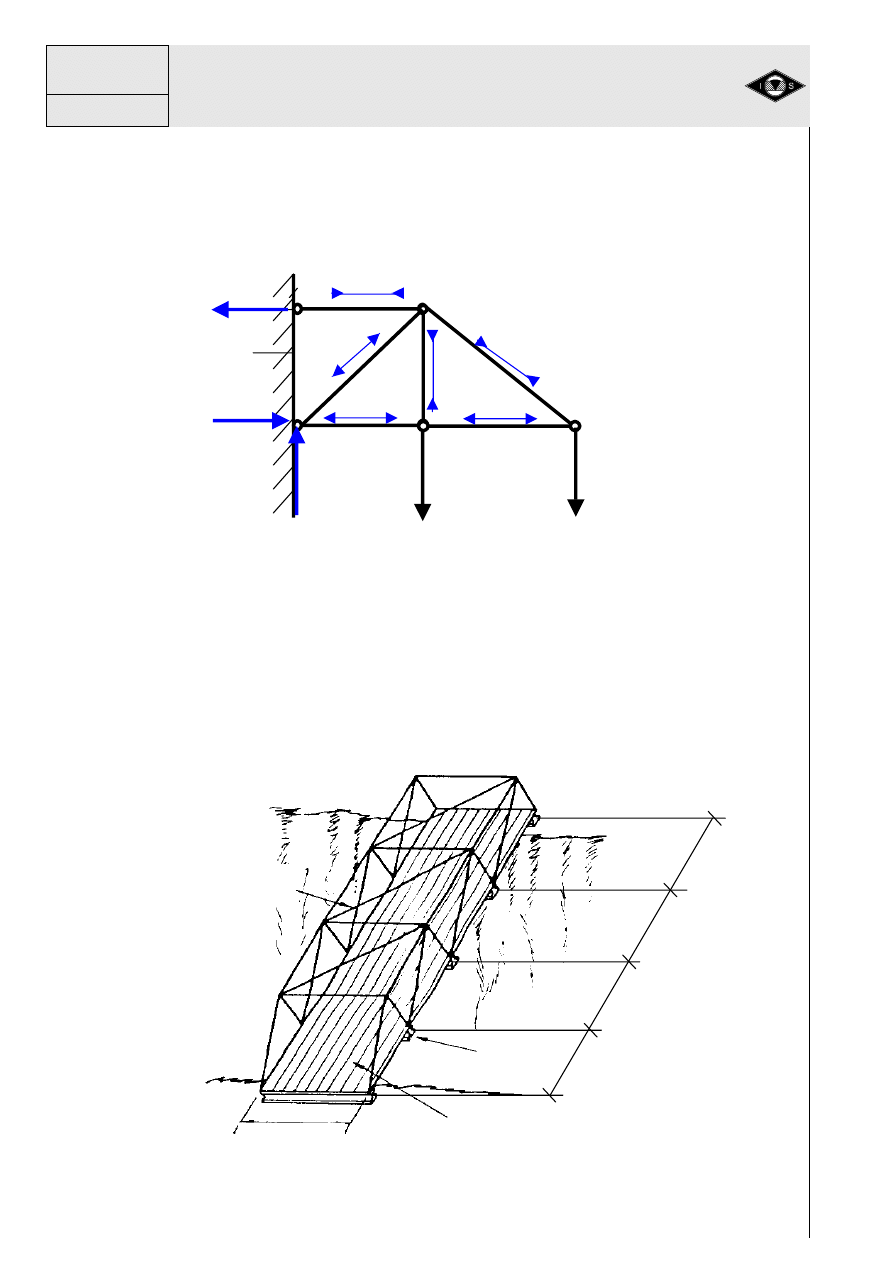
33
Rozwi
ą
zanie
(siły w kN)
Rys. 47 Wyniki oblicze
ń
sił w pr
ę
tach
Przykład 13
Wyznaczy
ć
siły w pr
ę
tach kratownicy przenosz
ą
cej obci
ąż
enie kładk
ą
o rozpi
ę
to
ś
ci
L=12[m]. Ka
ż
dy pr
ę
t – oprócz poprzecznych wzmocnie
ń
– ma długo
ść
l=3[m]. Kładka
ma szeroko
ść
b=2[m], a jej ci
ęż
ar wynosi G=35[kN]. Warto
ść
charakterystyczna ob-
ci
ąż
enia zmiennego Q=4 [kN/m
2
]. Cz
ęś
ciowy współczynnik bezpiecze
ń
stwa obci
ąż
e-
nia statycznego
4
.
1
)
(
=
s
f
γ
, a obci
ąż
enia dynamicznego
6
.
1
)
(
=
d
f
γ
Rys. 48 Widok kładki kratowej
Deski
Poprzeczna belka
4 x l = 3 m
Usztywnienie
poprzeczne
b = 2 m
A
B
E
P=10
P=10
R
A
=39
R
Bx
=39
R
By
=20
39.0
15.0
31.2
10.0
18.0
15.0
C
D
Opracowanie Instytut Spawalnictwa - Gliwice.
Wszelkie prawa zastrze
żone. Powielanie lub rozpowszechnianie ca
ło
ści wzgl
ędnie
fragmentu w jakiejkolwiek formie i w jakikolwiek sposób jest zabronione.
KURS MIĘDZYNARODOWEGO
INŻYNIERA / TECHNOLOGA / MISTRZA / INSTRUKTORA SPAWALNIKA
(IWE/IWT/IWS/IWP)
Podstawy teorii układów konstrukcji
Instytut
Spawalnictwa
w Gliwicach
3.1
AW 32
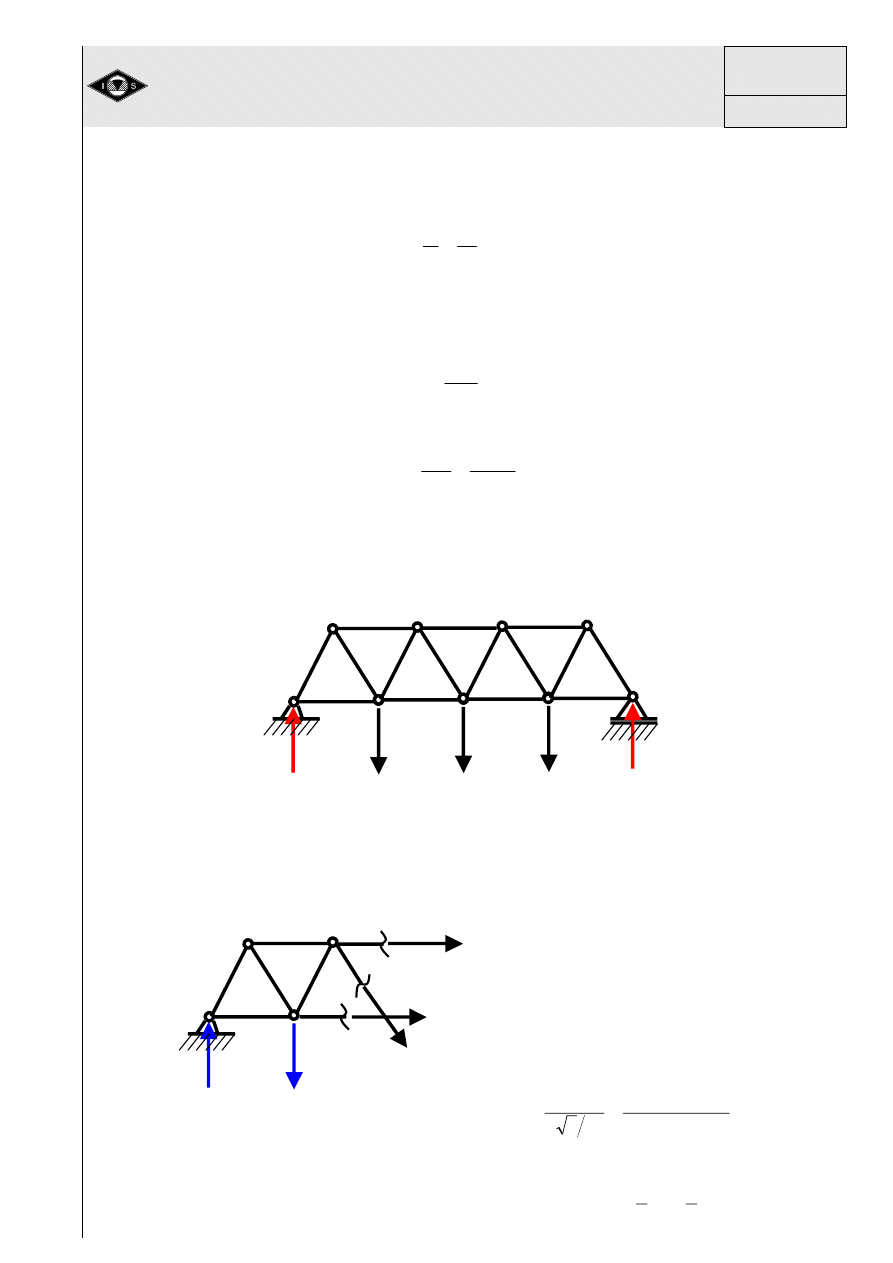
34
Rozwi
ą
zanie
1. Obci
ąż
enie stałe przypadaj
ą
ce na 1 metr mostu
[kN/m]
92
.
2
12
35
1
=
=
=
L
G
q
2. Ka
ż
dy w
ę
zeł dolnego pasa dwóch kratownic (lewej i prawej) obci
ąż
ony jest 3
metrami kładki
]
[
76
.
8
3
92
.
2
2
1
kN
l
q
P
g
=
⋅
=
⋅
=
3. Na jedn
ą
kratownice przypada
]
[
38
.
4
2
76
.
8
kN
P
g
=
=
4. Obci
ąż
enie zmienne pochodzi z cz
ęś
ci kładki o szeroko
ś
ci b=2[m] i długo
ś
ci
l=3[m]. Na jeden w
ę
zeł przypada wi
ę
c
]
[
14
2
3
2
4
2
kN
Qbl
P
d
=
⋅
⋅
=
=
Ostatecznie obci
ąż
enie w
ę
zła wynosi
]
[
3
.
25
6
.
1
12
4
.
1
38
.
4
)
(
)
(
kN
P
P
P
d
f
d
s
f
g
=
⋅
+
⋅
=
+
=
γ
γ
5. Schemat statyczny kratownicy (rys. 49)
Rys. 49 Schemat statyczny kratownicy
Metoda Rittera (rozwi
ą
zanie dla pr
ę
tów DF, DE i CE)
∑
∑
∑
=
=
=
0
)
3
0
)
2
0
)
1
ix
iD
iE
P
M
M
ad. 1)
0
60
sin
2
=
°
+
−
⋅
l
F
Pl
l
R
DF
A
]
[
5
.
58
2
/
73
.
1
95
.
37
2
3
.
25
2
3
2
kN
R
P
F
A
DF
−
=
⋅
−
=
−
=
-
pr
ę
t
ś
ciskany
ad. 2)
0
60
sin
2
2
3
=
°
−
−
⋅
l
F
l
P
l
R
CE
A
P
P
R
J
=37.95[kN]
R
A
=37.95[kN]
G
E
F
H
P
A
B
C
D
P
A
B
C
D
E
F
DE
F
CE
F
DF
R
A
Rys. 50 Przykład przeci
ę
cia kratownicy
Opracowanie Instytut Spawalnictwa - Gliwice.
Wszelkie prawa zastrze
żone. Powielanie lub rozpowszechnianie ca
ło
ści wzgl
ędnie
fragmentu w jakiejkolwiek formie i w jakikolwiek sposób jest zabronione.
KURS MIĘDZYNARODOWEGO
INŻYNIERA / TECHNOLOGA / MISTRZA / INSTRUKTORA SPAWALNIKA
(IWE/IWT/IWS/IWP)
Podstawy teorii układów konstrukcji
3.1
Instytut
Spawalnictwa
w Gliwicach
AW 33
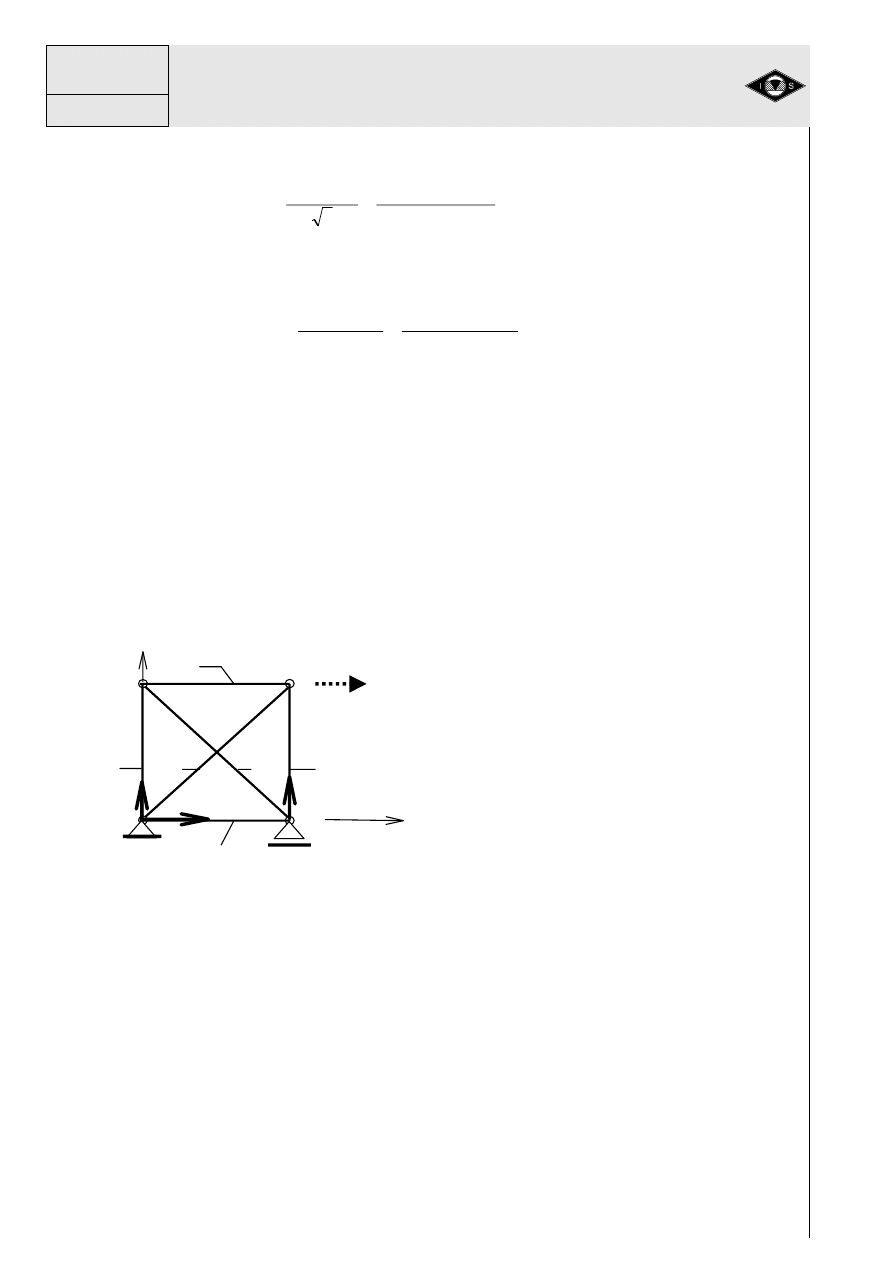
35
]
[
2
.
51
73
.
1
95
.
37
3
3
.
25
3
3
kN
R
P
F
A
CE
=
⋅
+
−
=
+
−
=
-
pr
ę
t rozci
ą
gany
ad. 3)
0
60
cos
=
°
+
+
DE
CE
DF
F
F
F
(
)
6
.
14
5
.
0
2
.
51
5
.
58
5
.
0
=
−
−
−
=
−
−
=
CE
DF
DE
F
F
F
-
pr
ę
t rozci
ą
gany
Przykład 14
Kratownica statycznie niewyznaczalna
Obliczy
ć
warto
ś
ci sił w pr
ę
tach kratownicy przedstawionej na rys.51 .
Kratownica zbudowana jest z 6 pr
ę
tów o identycznym przekroju
2
( )
1cm
F i
=
, oraz z
materiału, którego moduł Younga
5
2 10 MPa
E
= ⋅
. Pr
ę
ty 1, 3, 5, 6 maj
ą
identyczn
ą
długo
ść
( )
100cm
l i
=
.Oraz l(2)=l(4). Kratownica obci
ąż
ona jest sił
ą
poziom
ą
4
10 N
P
=
i podpart
ą
na dwóch podporach w w
ę
złach 1 i 2. Pr
ę
t 3 jest w poziomie. Podpora
przegubowa przesuwna daje reakcj
ę
o kierunku pionowym.
Rozwi
ą
zanie. Z warunku równowagi całej konstrukcji
4
4
4
1
1
2
10 N,
10 N,
10 N
x
y
R
R
R
= −
= −
=
1. Sprawdzenie czy konstrukcja jest statycznie wewn
ę
trznie wyznaczalna
Ilo
ść
w
ę
złów
4
w
=
, ilo
ść
pr
ę
tów
6
p
=
, wzór na sprawdzenie statycznej wyznaczal-
no
ś
ci
2
3,
p
w
=
−
sprawdzenie
1
2 4 3
5
p
= ⋅ − =
. Ró
ż
nica mi
ę
dzy rzeczywist
ą
ilo
ś
ci
ą
pr
ę
tów p a ilo
ś
ci
ą
pr
ę
tów p
1
, przy której kratownica była by statycznie wyznaczalna,
wynosi
1
1
p
p
−
=
. Wniosek kratownica jest jednokrotnie wewn
ę
trznie statycznie nie-
wyznaczalna.
2. Nale
ż
y kratownic
ę
uczyni
ć
statycznie wyznaczaln
ą
np. odcinaj
ą
c my
ś
lowo pr
ę
t 4
od w
ę
zła 3. W miejscu my
ś
lowego przeci
ę
cia w rzeczywistej konstrukcji działa siła X,
która zapewnia,
ż
e w miejscu tym b
ę
dzie ci
ą
gło
ść
konstrukcji czyli
0
δ
=
.
Równanie ci
ą
gło
ś
ci konstrukcji w miejscu przeci
ę
cia
10
11
0
X
δ δ
δ
=
+
=
.(a)
Gdzie
10
δ
jest luk
ą
mi
ę
dzy w
ę
złem 3 a ko
ń
cem pr
ę
ta 4 wywołan
ą
działaniem siły rze-
czywistej P (rys.52).
1
2
3
4
5
6
1
2
3
4
R
1y
R
1x
R
2
y
x
P
Rys.51 Schemat obci
ąż
e
ń
kratownicy
statycznie niewyznaczalnej
Opracowanie Instytut Spawalnictwa - Gliwice.
Wszelkie prawa zastrze
żone. Powielanie lub rozpowszechnianie ca
ło
ści wzgl
ędnie
fragmentu w jakiejkolwiek formie i w jakikolwiek sposób jest zabronione.
KURS MIĘDZYNARODOWEGO
INŻYNIERA / TECHNOLOGA / MISTRZA / INSTRUKTORA SPAWALNIKA
(IWE/IWT/IWS/IWP)
Podstawy teorii układów konstrukcji
Instytut
Spawalnictwa
w Gliwicach
3.1
AW 34
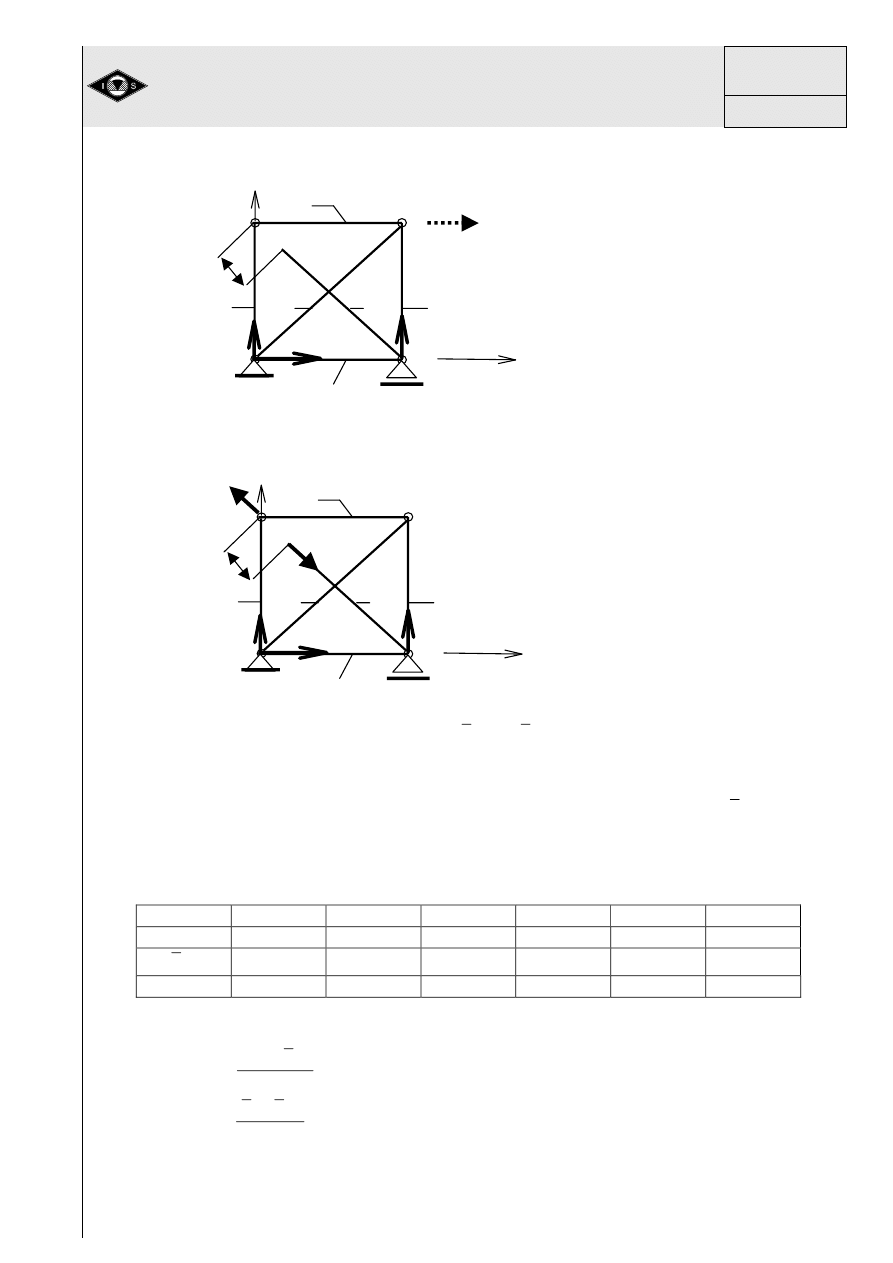
36
Natomiast
δ
11
jest luk
ą
mi
ę
dzy w
ę
złem 3 a ko
ń
cem pr
ę
ta 4 wywołan
ą
wirtualnym ob-
ci
ąż
eniem o warto
ś
ci
1N
X
=
(rys.53).
Z warunku równowagi całej konstrukcji
1
1
2
0,
0,
0
x
y
R
R
R
=
=
=
3. Z warunków równowagi poszczególnych w
ę
złów kratownic zamieszczonych
na rysunkach 2 i 3 obliczamy warto
ś
ci sił działaj
ą
cych w pr
ę
tach. I tak
( )
N i
s
ą
siłami wywołanymi obci
ąż
eniem rzeczywistym (rys.52), natomiast
( )
N i
s
ą
si-
łami powstałymi w wyniku działania obci
ąż
enia wirtualnego (rys.3). Warto
ś
ci
tych sił oraz długo
ś
ci pr
ę
tów zamieszczono w tablicy 2.
Tablica 2
i
1
2
3
4
5
6
N(i)/10
4
0
1,414
0
0
-1
0
( )
N i
0,707
-1
0,707
-1
0,707
0,707
l(i)cm
100
141,4
100
141,4
100
100
4. Warto
ś
ci współczynników
10
δ
i
11
δ
obliczamy ze wzorów:
6
10
1
( )
( )
( )
( ) ( )
i
i
N i
N i
l i
F i E i
δ
=
=
⋅
=
∑
(b)
6
11
1
( ) ( )
( )
( ) ( )
i
i
N i N i
l i
F i E i
δ
=
=
=
∑
(c)
Poniewa
ż
2
( )
1cm
F i
F
= =
oraz
5
( )
2 10 MPa
E i
E
= = ⋅
to wzory (b) i (c) przybior
ą
posta
ć
1
2
3
4
5
6
1
2
3
4
R
1y
R
1x
R
2
y
x
P
δ
10
3
1N
1N
1
2
4
5
6
1
2
3
4
R
1y
R
1x
R
2
y
x
δ
11
Rys. 52 Układ kratownicy
z rozci
ę
tym pr
ę
tem
Rys. 53 Układ kratownicy z zało
ż
onymi
obci
ąż
eniami wirtualnymi
Opracowanie Instytut Spawalnictwa - Gliwice.
Wszelkie prawa zastrze
żone. Powielanie lub rozpowszechnianie ca
ło
ści wzgl
ędnie
fragmentu w jakiejkolwiek formie i w jakikolwiek sposób jest zabronione.
KURS MIĘDZYNARODOWEGO
INŻYNIERA / TECHNOLOGA / MISTRZA / INSTRUKTORA SPAWALNIKA
(IWE/IWT/IWS/IWP)
Podstawy teorii układów konstrukcji
3.1
Instytut
Spawalnictwa
w Gliwicach
AW 35
37
6
10
6
1
10
10
1
( )
1
( ) ( ) ( )
i
i
i
i
k
i
k
N i N i l i
F E
FE
FE
δ
=
=
=
=
=
=
=
⋅
∑
∑
(d)
6
11
6
1
11
11
1
( )
1
( ) ( ) ( )
i
i
i
i
k
i
k
N i N i l i
F E
FE
FE
δ
=
=
=
=
=
=
=
⋅
∑
∑
(e)
W tablicy 3 zamieszczono warto
ś
ci
10
( )
k
i
oraz
11
( )
k
i
Tablica 3
i
1
2
3
4
5
6
k
10
(i)[N cm]
0
6
2 10
− ⋅
0
0
6
0.707 10
−
⋅
0
k
11
(i)[N cm]
50,0
141,4
50,0
141,4
50,0
50,0
10
k
obliczamy przez podstawienie danych z tabeli 2 do (d) st
ą
d
6
10
2, 707 10 Ncm
k
= −
⋅
11
k
obliczamy przez podstawienie danych z tabeli 2 do (e) st
ą
d
11
482,8Ncm
k
=
Z równania (a) mamy
10
6
10
10
11
11
11
2, 707 10
5607
482,8
k
k
FE
X
k
k
FE
δ
δ
−
⋅
= −
= −
= −
= −
=
Plus oznacza,
ż
e w rzeczywisto
ś
ci zwrot sił
( )
N i
jest zgodny ze znakiem w tabeli 1.
Warto
ś
ci rzeczywistych sił działaj
ą
cych w konstrukcji przedstawionej na rys.1
maj
ą
posta
ć
( )
( )
( )
rz
N
i
N i
N i
X
=
+
⋅
Warto
ś
ci tych sił przedstawiono w tablicy 4
Tablica 4
i
1
2
3
4
5
6
N(i)[N]
0
4
1, 414 10
⋅
0
0
4
10
−
0
[ ]
( )
N i
X N
⋅
3964
4
0, 561 10
−
⋅
3964
5607
−
3964
3964
[ ]
( )
rz
N
i N
3964
8533
3964
5607
−
6036
−
3964
Literatura
1. W. Siuta Mechanika Techniczna PWSZ Warszawa
2. A. Jakubowicz, Z. Orło
ś
, Wytrzymało
ś
c materiałów WNT Warszawa
Opracowanie Instytut Spawalnictwa - Gliwice.
Wszelkie prawa zastrze
żone. Powielanie lub rozpowszechnianie ca
ło
ści wzgl
ędnie
fragmentu w jakiejkolwiek formie i w jakikolwiek sposób jest zabronione.
KURS MIĘDZYNARODOWEGO
INŻYNIERA / TECHNOLOGA / MISTRZA / INSTRUKTORA SPAWALNIKA
(IWE/IWT/IWS/IWP)
Podstawy teorii układów konstrukcji
Instytut
Spawalnictwa
w Gliwicach
3.1
AW 36
Wyszukiwarka
Podobne podstrony:
IWE IWP 2 5 2012
IWE IWP 4 6 2012
IWE IWP 1 7 2012
IWE IWP 4 4 2012
IWE IWP 1 2 2012
IWE IWP 3 2 2012
IWE IWP 2 8 2012
IWE IWP 1 8 2 2012
IWE IWP 1 5 2012
IWE IWP 1 6 2012
IWE IWP 2 5 2012
IWE IWP 4 6 2012
IWE IWP 1 7 2012
IWE IWP 1 7 2012
IWE IWP 2 18 2012
IWE IWP 2 19 2012
IWE IWP 2 11 2012
IWE IWP 1 16 2012
IWE IWP 2 22 2012
więcej podobnych podstron