
1
Informacje ogólne
Podstawy Automatyki
Instytut Automatyki i Robotyki
Autorzy programu:
prof. dr hab. in
ż
. Jan Maciej Ko
ś
cielny,
dr in
ż
. Wie
ń
czysław Jacek Ko
ś
cielny
Semestr IV
Semestr IV
Liczba godzin zaj
ęć
według planu studiów:
Wykład 45
E
Ć
wiczenia 15
Laboratorium 30 (semestr V)
Liczba punktów kredytowych: 6
Ustalenia dotycz
ą
ce zaliczenia przedmiotu
2
1. Do zaliczenia przedmiotu Podstawy Automatyki wymagane jest
zaliczenie
ć
wicze
ń
tablicowych i zdanie egzaminu. W ko
ń
cowej ocenie
przedmiotu uwzgl
ę
dniana jest ocena z
ć
wicze
ń
i ocena z egzaminu.
2. Terminem zaliczania
ć
wicze
ń
tablicowych jest ostatni dzie
ń
semestru
letniego.
3. Egzamin składa si
ę
z cz
ęś
ci pisemnej i ustnej; cz
ęść
ustna nie jest
obowi
ą
zkowa.
4. Egzamin pisemny z Podstaw automatyki trwa 2 godziny zegarowe.
5. Do egzaminu ustnego mog
ą
przyst
ą
pi
ć
tylko te osoby, które uzyskały
5. Do egzaminu ustnego mog
ą
przyst
ą
pi
ć
tylko te osoby, które uzyskały
pozytywn
ą
ocen
ę
z egzaminu pisemnego i które chc
ą
zaprezentowa
ć
swoj
ą
wiedz
ę
uzasadniaj
ą
c
ą
podwy
ż
szenie oceny uzyskanej z cz
ęś
ci
pisemnej egzaminu.
6. Ocen
ę
z egzaminu mo
ż
na tak
ż
e poprawi
ć
przyst
ę
puj
ą
c ponownie do
egzaminu pisemnego.
7. Ostatnie zaj
ę
cia w semestrze przeznaczone s
ą
na dodatkowy termin
egzaminu (termin 0).
Ustalenia dotycz
ą
ce zaliczenia przedmiotu
3
8.
Do egzaminu w terminie 0 mog
ą
przyst
ą
pi
ć
tylko te osoby, które
zaliczyły
ć
wiczenia tablicowe z ocen
ą
co najmniej 4.
9.
Do egzaminu w dalszych terminach mog
ą
przyst
ą
pi
ć
tylko osoby,
które zaliczyły
ć
wiczenia tablicowe.
10. Oceny do indeksu wpisuje prof. dr hab. in
ż
. Jan Maciej Ko
ś
cielny.
11. Wzór wpisu do indeksu: Prof. Jan M. Ko
ś
cielny, Podstawy
automatyki I, liczba godz. wykł. – 3, liczba godz.
ć
wicz. 1.
12. Studenci, którzy uzyskali przed terminem rejestracyjnym tylko
zaliczenie
ć
wicze
ń
, zgłaszaj
ą
si
ę
po wpis zaliczenia
ć
wicze
ń
.

Przyj
ę
te ustalenia
4
Ustalenia dotycz
ą
ce wykładu:
• 8 wykładów trzygodzinnych – cz
ęść
dotycz
ą
ca procesów ci
ą
głych,
• 6 wykładów trzygodzinnych – cz
ęść
dotycz
ą
ca procesów
dyskretnych,
• ostatni wykład w semestrze – egzamin, termin 0.
Ustalenia dotycz
ą
ce
ć
wicze
ń
tablicowych:
• 10
ć
wicze
ń
dotyczy procesów ci
ą
głych (w tym 2 kolokwia),
• 10
ć
wicze
ń
dotyczy procesów ci
ą
głych (w tym 2 kolokwia),
• 5
ć
wicze
ń
dotyczy procesów dyskretnych (w tym 1 kolokwium).
Ustalenia dotycz
ą
ce
ć
wicze
ń
laboratoryjnych (wymiar tygodniowy
2 godz.; 30 godz. w semestrze):
• 10 terminów po 3 godz.
• 1 termin organizacyjny,
• 5
ć
wicze
ń
dotyczy procesów ci
ą
głych,
• 4
ć
wiczenia dotyczy procesów dyskretnych.
Prowadz
ą
cy
5
Prowadz
ą
cy wykłady:
Prof. dr hab. in
ż
. Jan M. Ko
ś
cielny – cz
ęść
dotycz
ą
ca procesów ci
ą
głych,
Dr in
ż
. Wie
ń
czysław J. Ko
ś
cielny – cz
ęść
dotycz
ą
ca procesów dyskretnych.
Prowadz
ą
cy
ć
wiczenia tablicowe w roku akad. 2011/12
Gr. 21
Pn 13.15
s.366
mgr in
ż
. Anna Sztyber
Gr. 22
Pn 15.15
s.336
mgr in
ż
. Alicja Siewnicka
Gr. 22
Pn 15.15
s.336
mgr in
ż
. Alicja Siewnicka
Gr. 23
Ś
r 11.15
s.16
mgr Zofia Łab
ę
da-Grudziak
Gr. 24
Wt 15.15
s.422
mgr in
ż
. Alicja Siewnicka
Gr. 25
Cz 15.15
s.519
dr in
ż
. Jakub Mo
ż
aryn
Gr. 26
Pt
12.15
s.519
mgr Zofia Łab
ę
da-Grudziak
Gr. 27
Pt
13.15
s.519
dr in
ż
. Jakub Mo
ż
aryn
Gr. 28
Pt
13.15
s.336
mgr in
ż
. Anna Sztyber
6
Program wykładu (cz
ęść
1)
Poj
ę
cia podstawowe: sygnał, informacja, element automatyki, układ automatyki, obiekt,
regulator. Struktury przyrz
ą
dowe i klasyfikacje układów automatyki.
Układy liniowe: opis matematyczny (równania ró
ż
niczkowe, transmitancja operatorowa,
równania stanu i wyj
ść
, podstawy opisu układów dyskretnych), linearyzacja,
przedstawianie wła
ś
ciwo
ś
ci statycznych i dynamicznych. Podstawowe człony
dynamiczne, charakterystyki cz
ę
stotliwo
ś
ciowe. Schematy blokowe.
Obiekty regulacji i regulatory przemysłowe: obiekty statyczne i astatyczne, metody
identyfikacji. Regulatory PID - realizacja mikroprocesorowa, wła
ś
ciwo
ś
ci funkcjonalne.
Wymagania stawiane układom automatyki: stabilno
ść
(podstawowe kryteria),
dokładno
ść
statyczna, jako
ść
dynamiczna i jej wska
ź
niki. Dobór nastaw regulatorów.
dokładno
ść
statyczna, jako
ść
dynamiczna i jej wska
ź
niki. Dobór nastaw regulatorów.
Struktury układów automatyki i przykładowe zastosowania: regulacja
jednoobwodowa, kaskadowa, z korekcj
ą
dynamiczn
ą
, regulacja stosunku prosta i
kaskadowa, układy zamkni
ę
to-otwarte. Zastosowania w energetyce, przemy
ś
le
chemicznym, przemy
ś
le spo
ż
ywczym.
Układy nieliniowe: typowe nieliniowo
ś
ci, układy regulacji dwu- i trój-stanowej.
Technika automatyzacji: Realizowane zadania. Struktury funkcjonalne układów
automatyki. Struktury sprz
ę
towe: systemy zintegrowane - klasy DCS, sterowniki
programowalne, systemy monitorowania - SCADA, sieci w układach automatyki,
układy blokad i zabezpiecze
ń
. Konfigurowanie układów automatyki.

7
Program
ć
wicze
ń
audytoryjnych
Ć
wiczenia audytoryjne s
ą ś
ci
ś
le skorelowane z materiałem wykładowym
i obejmuj
ą
:
- formułowanie opisu matematycznego wybranych elementów automatyki
- wyznaczanie odpowiedzi na typowe wymuszenia przy u
ż
yciu rachunku
operatorowego (przekształcenie Laplacea)
- układanie i przekształcanie schematów blokowych
- analityczne i wykre
ś
lne metody wyznaczania charakterystyk
cz
ę
stotliwo
ś
ciowych
cz
ę
stotliwo
ś
ciowych
- badanie stabilno
ś
ci układów automatyki (metody Hurwitza i Nyquista)
- badanie dokładno
ś
ci statycznej układów automatyki
- identyfikacja obiektów regulacji na podstawie zarejestrowanych
odpowiedzi skokowych obiektu lub charakterystyk cz
ę
stotliwo
ś
ciowych
- dobór nastaw regulatora do przykładowych obiektów regulacji
8
Literatura do wykładu (cz
ęść
1)
•
Ż
elazny M.: Materiały pomocnicze do wykładu: Podstawy Automatyki
•
Ż
elazny M.: Podstawy Automatyki. WNT, Warszawa 1976
• Ko
ś
cielny W.: Materiały pomocnicze do nauczania podstaw automatyki. Oficyna
Wydawnicza PW, Warszawa 2001, wyd. III
• Malinowski K, Tatjewski P.: Podstawy Automatyki. Preskrypt, PW.
• Kaczorek T.: Teoria układów regulacji automatycznej/ WNT, Warszawa, 1974
• W
ę
grzyn S.: Podstawy automatyki. PWN, Warszawa, 1980
• Gessing R.: Podstawy automatyki. Wydawnictwo Politechniki
Ś
l
ą
skiej, 2001
• Mazurek J., Vogt H.,
Ż
ydanowicz W.: Podstawy automatyki. Oficyna Wydawnicza
PW, Warszawa 2002
• D
ę
bowski A.: Automatyka. Podstawy teorii. WNT, Warszawa 2008.
• Rumatowski K. Podstawy regulacji automatycznej. Wyd. Politechniki Pozna
ń
skiej,
Pozna
ń
2008
• Holejko D., Ko
ś
cielny W., Niewczas W.: Zbiór zada
ń
z podstaw automatyki.
Wydawnictwa Politechniki Warszawskiej, 1985, wyd. VIII
Literatura do wykładu (cz
ęść
2)
9
• Zieli
ń
ski C.: Podstawy projektowania układów cyfrowych. PWN, Warszawa, 2003
• Traczyk W.: Układy cyfrowe automatyki. WNT, Warszawa 1974
• Misiurewicz P.: Podstawy techniki cyfrowej. WNT, Warszawa 1982
• Majewski W.: Układy logiczne. WNT, Warszawa 1999
• Ko
ś
cielny W.: Podstawy automatyki, cz. 2. WPW, Warszawa 1984
• Barczyk J.: Automatyzacja procesów dyskretnych. Oficyna Wydawnicza PW,
Warszawa 2003
• Kowalowski H. i inni: Automatyzacja dyskretnych procesów przemysłowych. WNT,
• Kowalowski H. i inni: Automatyzacja dyskretnych procesów przemysłowych. WNT,
Warszawa 1984
• Mikulczy
ń
ski T.: Automatyzacja procesów produkcyjnych. WNT, Warszawa 2006
Politechnika Warszawska
Instytut Automatyki i Robotyki
Prof. dr hab. in
ż
. Jan Maciej Ko
ś
cielny
PODSTAWY AUTOMATYKI
PODSTAWY AUTOMATYKI
1. Wprowadzenie, poj
ę
cia podstawowe
11
Plan wykładu
11
• Definicja automatyki jako dziedziny nauki i techniki
• Krótki rys historyczny
• Poj
ę
cia podstawowe: sygnał, informacja, element
automatyki, układ automatyki, obiekt, regulator
• Procesy ci
ą
głe i dyskretne
• Sterowanie i regulacja
• Sterowanie i regulacja
• Klasyfikacje układów automatyki
12
Definicja automatyki
Mechanizacja – uwolnienie człowieka od roli
ź
ródła energii niezb
ę
dne do
Automatyka – dziedzina nauki i techniki zajmuj
ą
ca si
ę
zagadnieniami
samoczynnego (automatycznego) sterowania i automatycznej kontroli
Sterowaniem nazywa si
ę
celowe oddziaływanie na dany proces, w
sposób zamierzony, maj
ą
cy doprowadzi
ć
do spełnienia okre
ś
lonego celu.
Proces, na który wywiera si
ę
oddziaływanie steruj
ą
ce, nazywa si
ę
obiektem sterowania
Mechanizacja – uwolnienie człowieka od roli
ź
ródła energii niezb
ę
dne do
realizacji procesu, a pozostawienie mu jedynie funkcji kontroli
i sterowania
Automatyzacja – wyeliminowanie pracy człowieka (umysłowej
i fizycznej) przez zast
ą
pienie go automatem
Automat – urz
ą
dzenie działaj
ą
ce samoczynnie
13
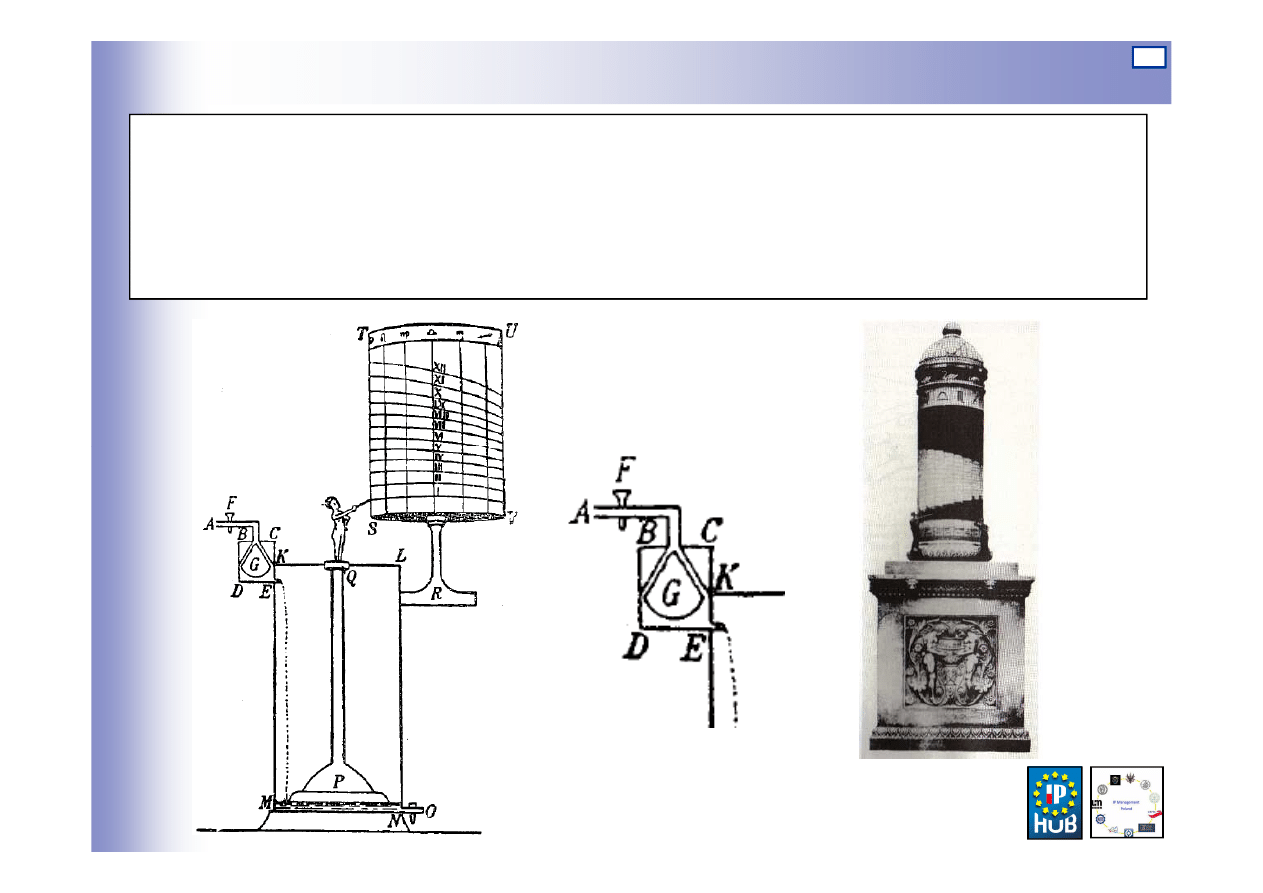
Historia - staro
ż
ytno
ść
Zegar wodny – Ktesibios (285-222 przed Chr.)
• wykorzystuje układ regulacji nat
ęż
enia przepływu wody
• pływak G utrzymuje stały poziom wody w zbiorniku BCDE, dzi
ę
ki
czemu strumie
ń
wypływaj
ą
cy z tego zbiornika jest stały.
http://free.of.pl/z/zst/pomoce/publikacje/automatyka.pdf
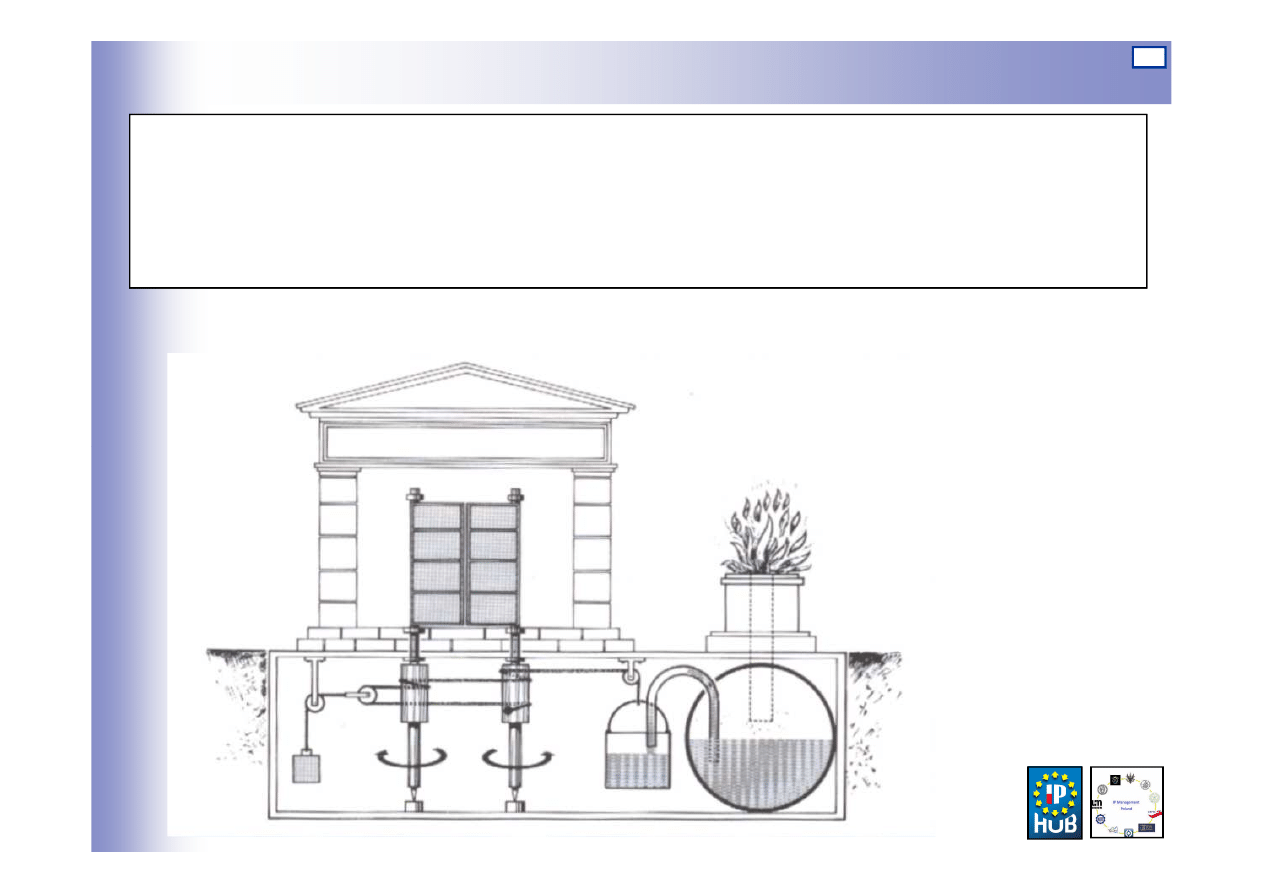
Historia - staro
ż
ytno
ść
14
Automat do otwierania drzwi teatrzyku marionetek – Heron (I/II w.)
Woda przelewa si
ę
z okr
ą
głego zbiornika do naczynia poprzez rurk
ę
zakrzywion
ą
w kształcie litery „U”. Naczynie staje si
ę
ci
ęż
sze i poci
ą
ga
za sob
ą
link
ę
, której mechanizm działania nie wymaga ju
ż
komentarzy.
http://free.of.pl/z/zst/pomoce/publikacje/automatyka.pdf
http://free.of.pl/z/zst/pomoce/publikacje/automatyka.pdf
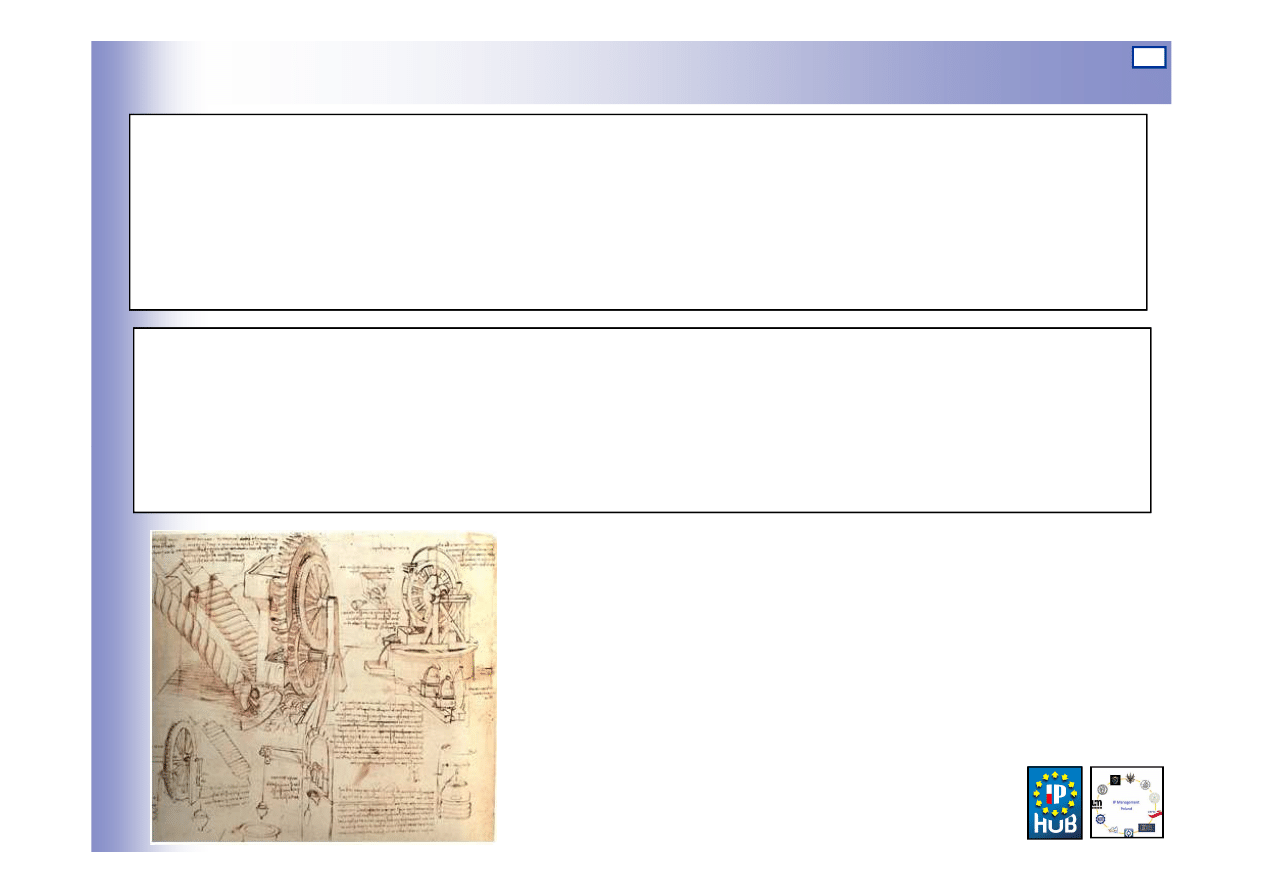
Historia –
Ś
redniowiecze, Odrodzenie
15
Ś
redniowiecze:
Androidy (np. gadaj
ą
ca głowa)
- Roger Bacon (1214-1292),
-
Ś
w. Albert Wielki (ok. 1200-1280)
Odrodzenie:
Automatyczne krosno tkackie, łód
ź
podwodna, samopowtarzalna
katapulta, lataj
ą
cy
ż
elazny orzeł, sztuczna mucha
katapulta, lataj
ą
cy
ż
elazny orzeł, sztuczna mucha
- Leonardo da Vinci (1492 -1519), Johannes Muller (1436 – 1476)
Rysunek przyrz
ą
dów do d
ź
wigania wody, 1480-82
http://free.of.pl/z/zst/pomoce/publikacje/automatyka.pdf
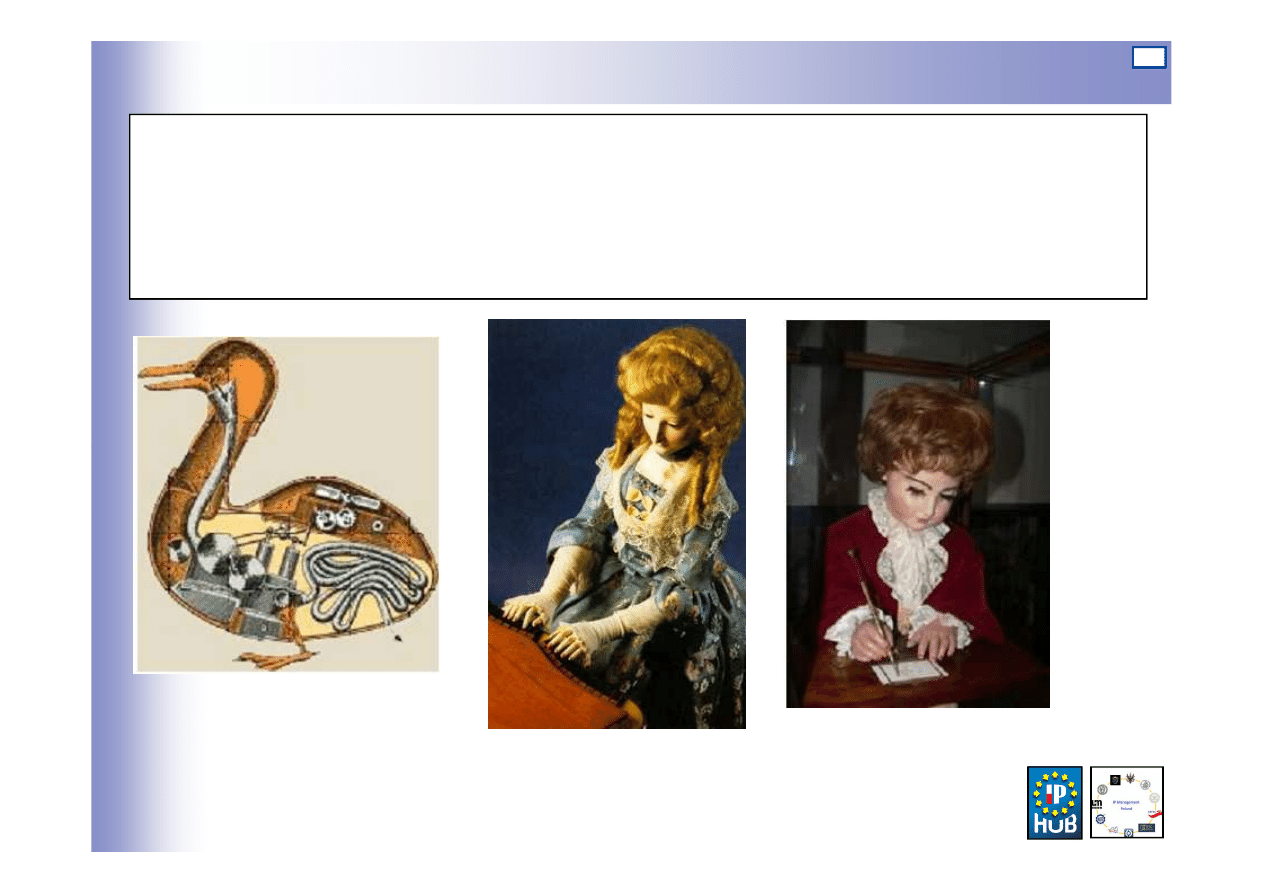
Historia - XVIII wiek
16
Magiczne automaty - androidy graj
ą
ce, pisz
ą
ce itp.,
ś
piewaj
ą
ce ptaki
teatry magiczne, zegary z ruchomymi figurkami:
- Jacgues de Vaucanson (1709 -1782),
- Pierre Jaguet – Droz (ok. 1721-1790)
http://free.of.pl/z/zst/pomoce/publikacje/automatyka.pdf
Klawikordzistka
Rysownik
Kaczka
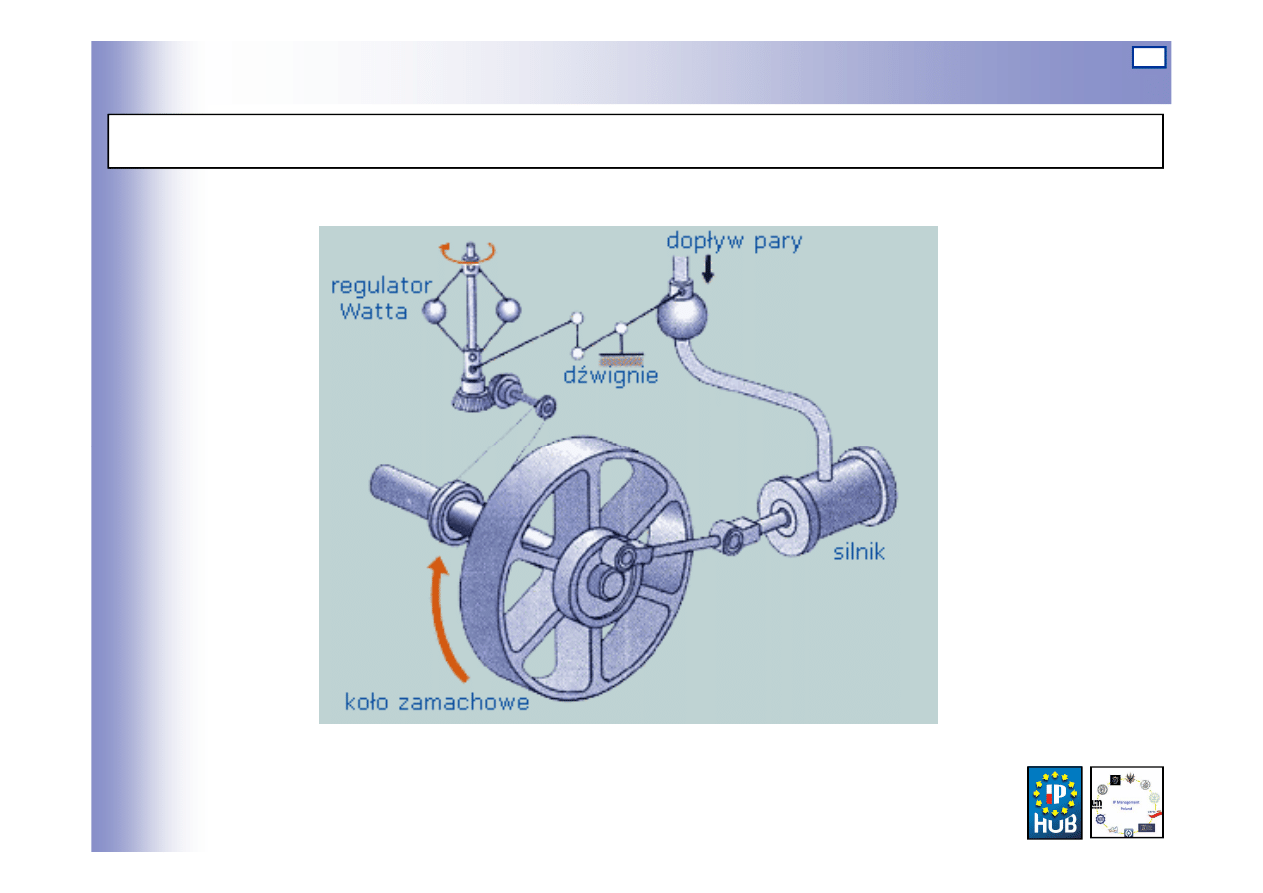
Historia - XVIII wiek
17
Regulator pr
ę
dko
ś
ci obrotowej maszyny parowej – J. Watt, 1736 -1819)
http://free.of.pl/z/zst/pomoce/publikacje/automatyka.pdf
Historia - XX wiek
18
Automatyka jako nauka teoretyczna
1892 – Lapunow – stabilno
ść
punktu równowagi
1895 – Routh i Hurwitz – kryterium stabilno
ś
ci
1922 – Minorsky – regulator PID (pierwsza publikacja)
1932 – Nyquist – kryterium stabilno
ś
ci
1936 – Ziegler i Nichols – regulator PID
1942 – Ziegler i Nichols – reguły doboru nastaw regulatora PID
1956 – Pontriagin – zasada maksimum
1956 – Bellman – programowanie dynamiczne
19
• W 1923 roku w USA rozpocz
ę
ła prac
ę
pierwsza automatyczna linia
produkcyjna
• W 1947 roku pierwszy bezzałogowy lot samolotu typu Douglas 054
• W latach pi
ęć
dziesi
ą
tych: obrabiarki sterowane numerycznie
• 1969 – mikroprocesor
• 1969 - Pierwszy sterownik programowalny Modicon 084 opracowany
przez Dicka Morleya
Historia - XX wiek
przez Dicka Morleya
• 1974 – pierwszy system DCS
• W latach siedemdziesi
ą
tych roboty przemysłowe i zautomatyzowane
magazyny,
• W latach osiemdziesi
ą
tych buduje si
ę
całkowicie zautomatyzowane linie
produkcyjne.
• Komputery – gwałtowny rozwój automatyzacji
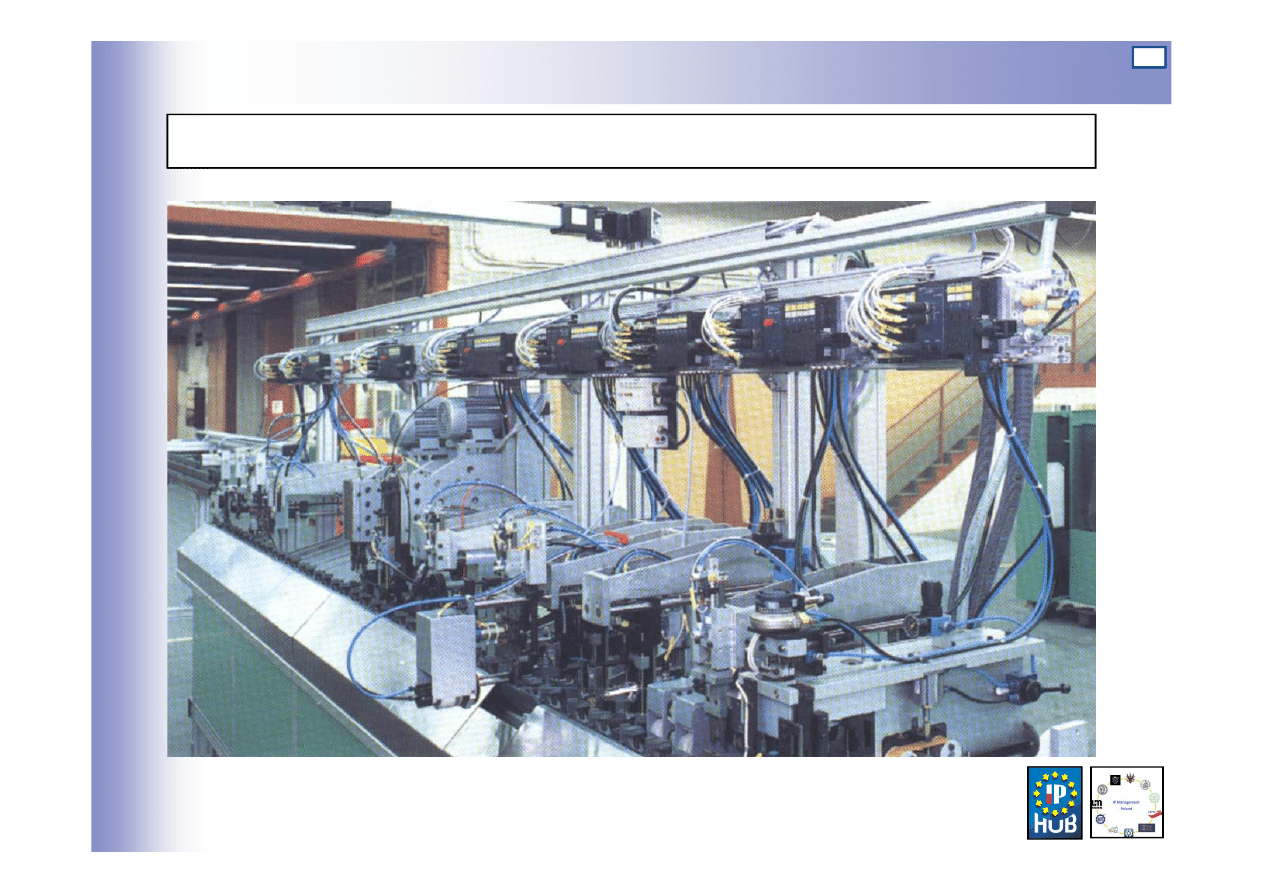
Stan aktualny
20
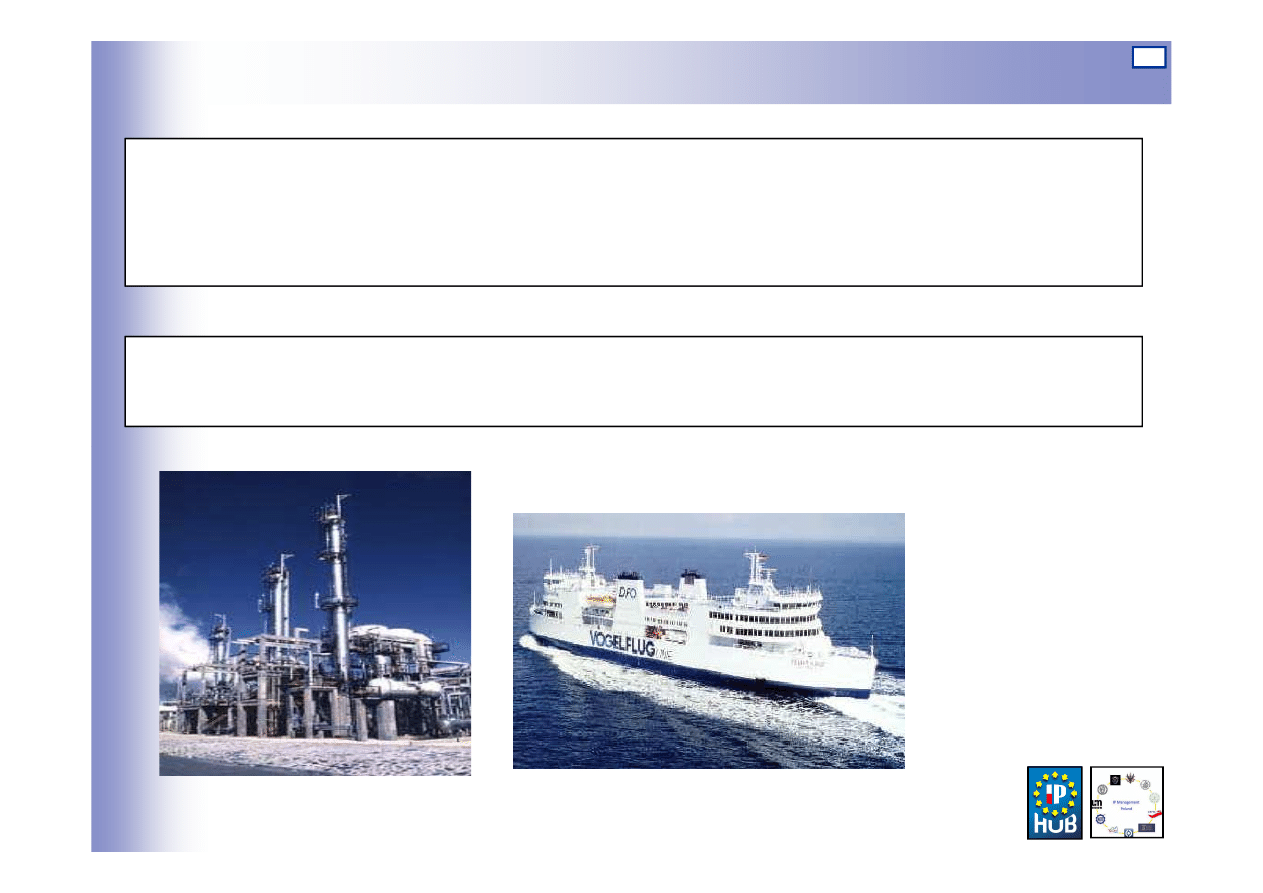
Przykład zautomatyzowanej linii produkcyjnej
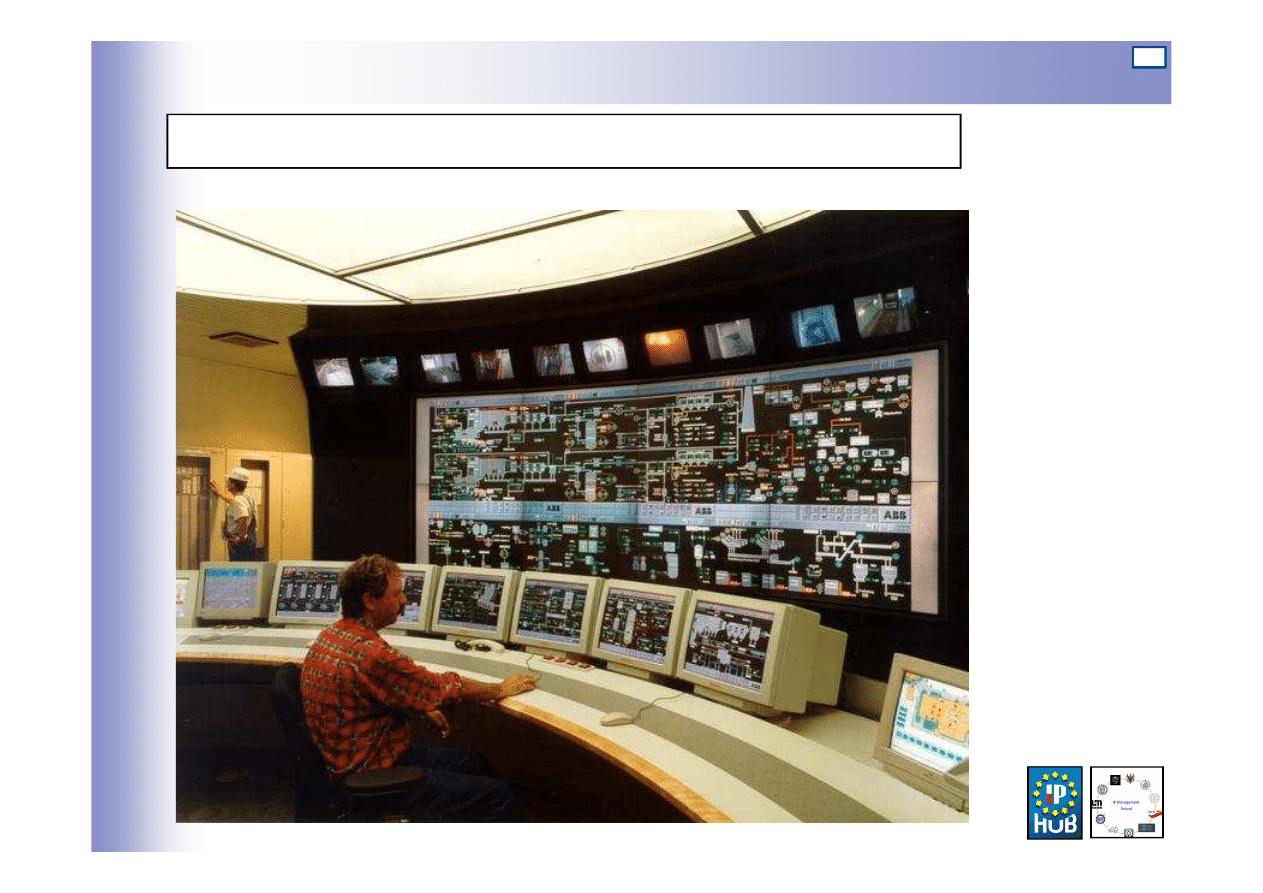
Stan aktualny
21
Sterownia w zakładach chemicznych
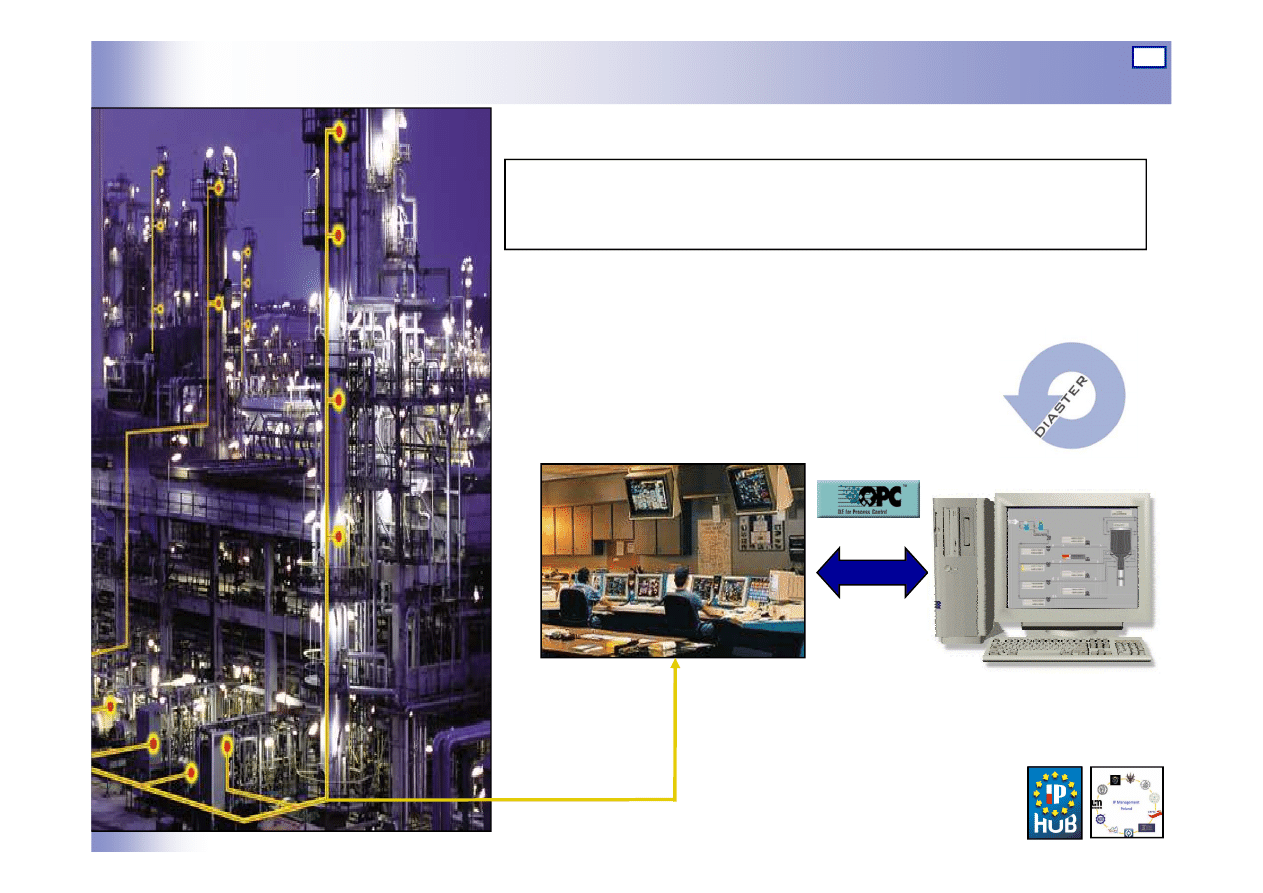
Stan aktualny
22
Distributed
Control
System
(DCS)
Struktura systemu automatyzacji
przedsi
ę
biorstwa
23
Poj
ę
cia podstawowe
Sygnał - przebieg zmian w czasie okre
ś
lonej wielko
ś
ci fizycznej,
wyra
ż
aj
ą
cy w umowny sposób informacj
ę
.
24
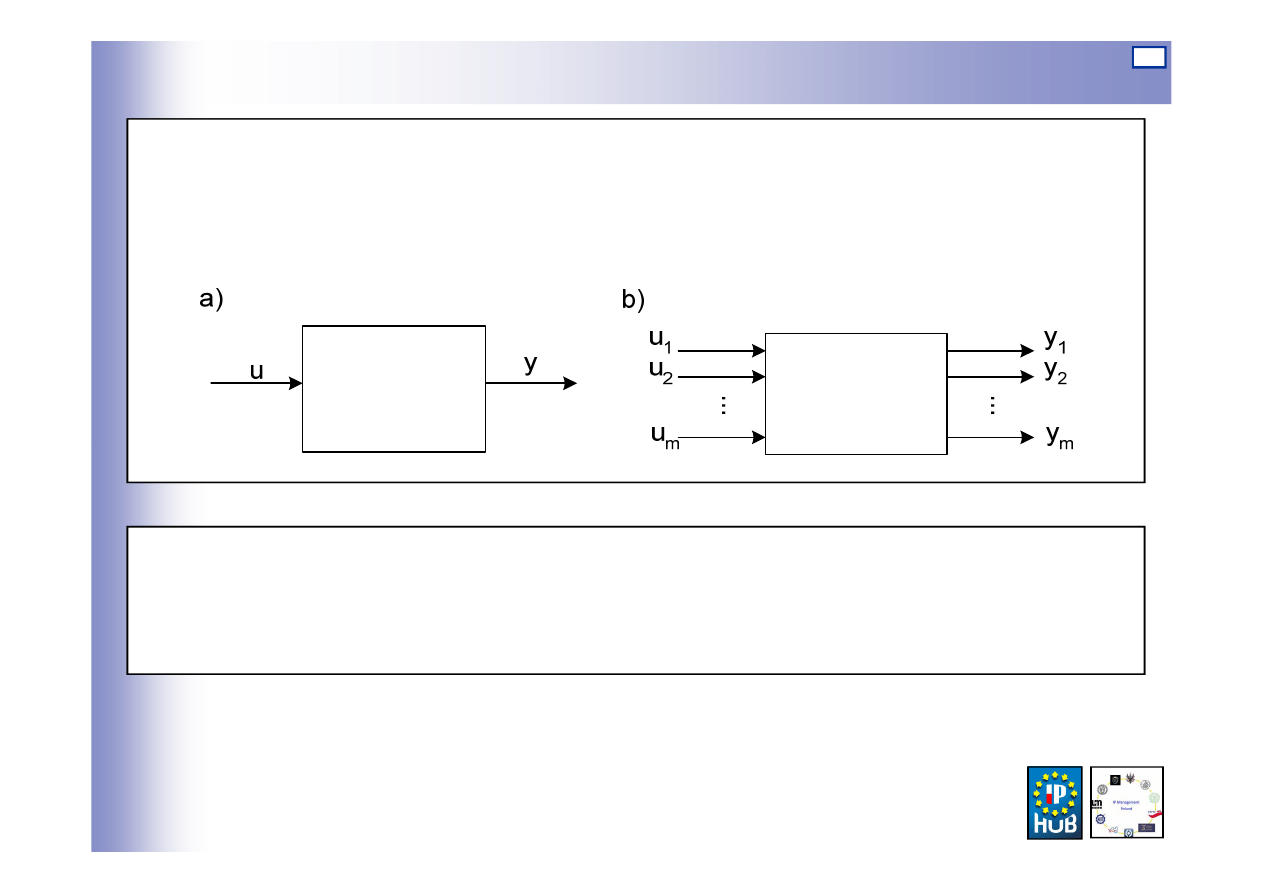
Poj
ę
cia podstawowe
Element automatyki (człon) - podzespół, zespół, przyrz
ą
d lub urz
ą
dzenie,
w którym mo
ż
na wyró
ż
ni
ć
sygnał wej
ś
ciowy i sygnał wyj
ś
ciowy -
rys. a, lub sygnały wej
ś
ciowe i wyj
ś
ciowe - rys. b.
Układ automatyki - zespół wzajemnie powi
ą
zanych elementów bior
ą
cych
udział w sterowaniu automatycznym danego procesu
(uporz
ą
dkowany zgodnie z kierunkiem przekazywania sygnałów)
Poj
ę
cia podstawowe
25
Proces, na który wywiera si
ę
oddziaływanie steruj
ą
ce, nazywa si
ę
obiektem sterowania
Sterowanie automatyczne - oddziaływanie na proces, którego
zamierzony przebieg chcemy uzyska
ć
,
bez udziału człowieka, za
pomoc
ą
urz
ą
dze
ń
nazywanych ogólnie aparatur
ą
automatyki.
Sygnały w układach automatyki
26
Sygnałem jest przebieg zmian w czasie okre
ś
lonej wielko
ś
ci fizycznej, wyra
ż
aj
ą
cy
w umowny sposób informacj
ę
. Sygnał charakteryzuj
ą
tre
ś
ci fizyczne oraz parametr
informacji:
Tre
ść
fizyczna sygnału okre
ś
la rodzaj wielko
ś
ci fizycznej jak
ą
jest ten sygnał. (np.
ci
ś
nienie spr
ęż
onego powietrza, ci
ś
nienie oleju, nat
ęż
enie pr
ą
du stałego itd.)
Parametr informacji okre
ś
la sposób przenoszenia informacji oraz warto
ść
sygnału
lub zakres zmian, np. chwilowa warto
ść
sygnału ci
ś
nieniowego hydraulicznego -
1600 kPa, zakres zmian warto
ś
ci amplitudy sygnału ci
ś
nieniowego
1600 kPa, zakres zmian warto
ś
ci amplitudy sygnału ci
ś
nieniowego
pneumatycznego – 20 ÷100 kPa
Sygnał analogowy charakteryzuje si
ę
tym,
ż
e warto
ś
ci wielko
ś
ci sygnalizowanej
s
ą
jednoznacznie i w sposób ci
ą
gły odwzorowywane na warto
ś
ci parametru
informacji, sygnał mo
ż
e by
ć
ci
ą
gły i nieci
ą
gły.
Sygnał dyskretny charakteryzuje si
ę
okre
ś
lon
ą
liczb
ą
dyskretnych warto
ś
ci
parametru informacji. Szczególnym przypadkiem sygnałów dyskretnych s
ą
sygnały
binarne – {0,1})
27
Sygnały w układach automatyki
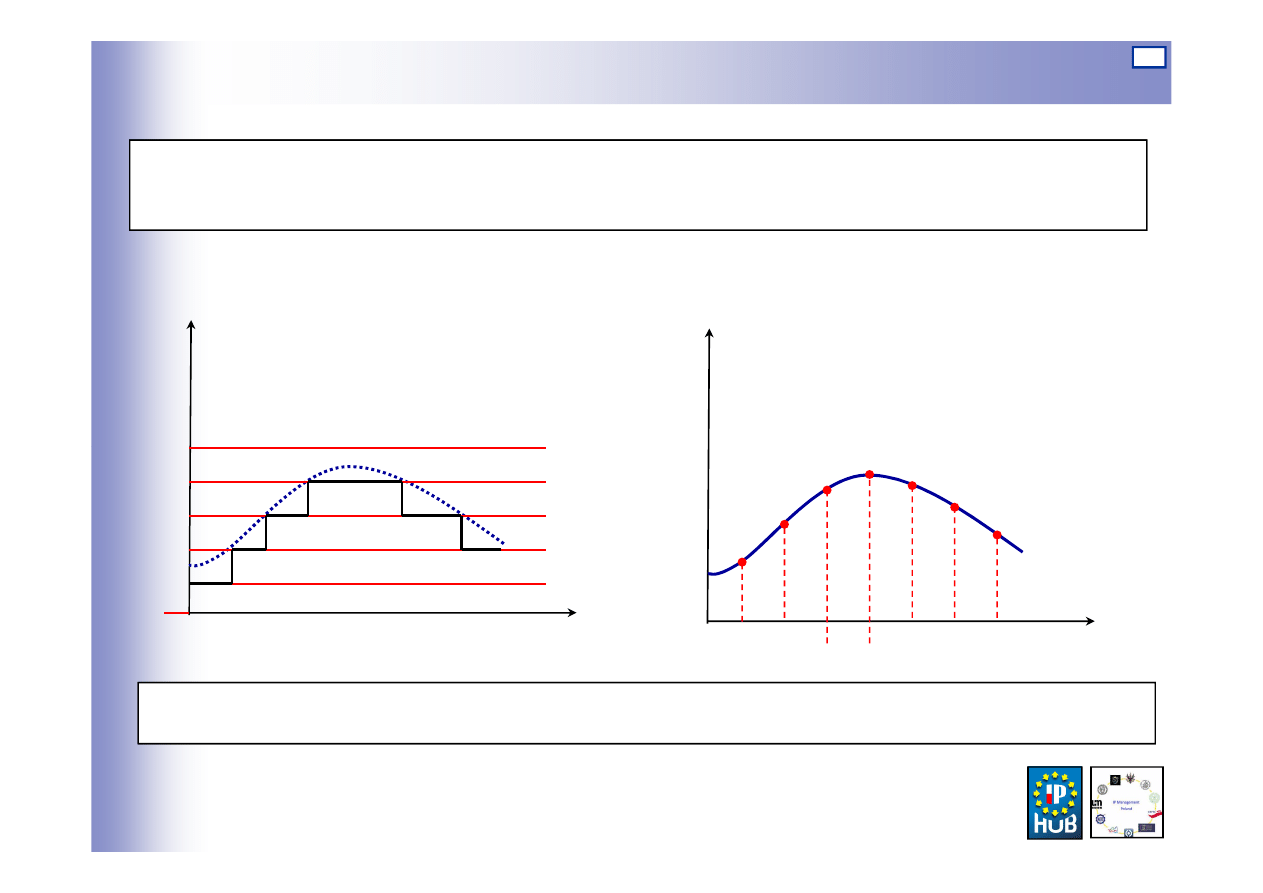
Sygnały dyskretne (wielostanowe) mo
ż
na otrzyma
ć
z sygnału ci
ą
głego
w wyniku kwantowania warto
ś
ci
y
y
Dyskredytacja warto
ś
ci - kwantowanie
Dyskredytacja w czasie - próbkowanie
Informacja - warto
ść
lub kształt przebiegu sygnału
t
0
1
2
3
4
t
T
p
Sygnały analogowe
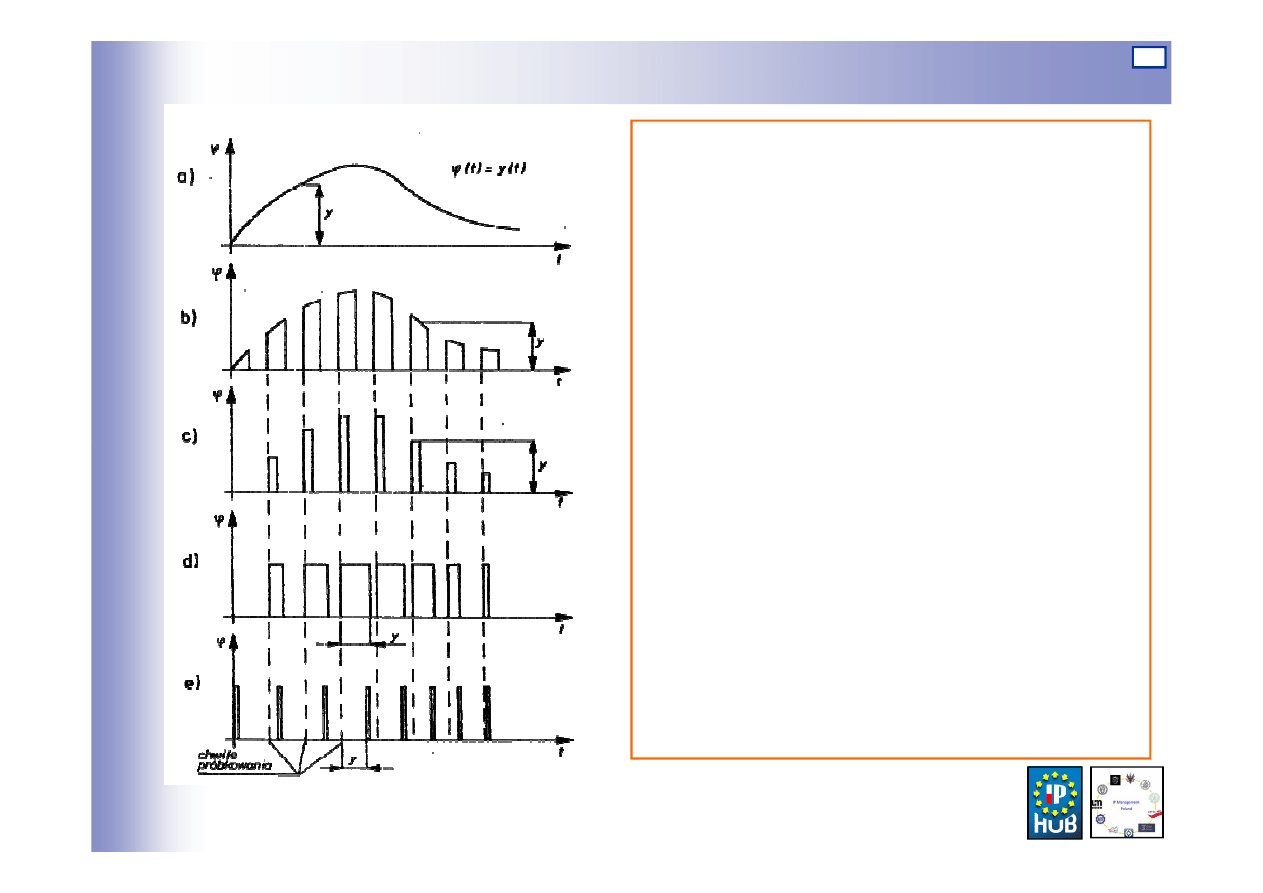
28
Przykłady sygnałów analogowych:
a) sygnał ci
ą
gły, parametrem
informacji jest bie
żą
ca warto
ść
amplitudy y,
b) sygnał przerywany,
c) sygnał impulsowy, parametrem
informacji jest amplituda impulsów,
d) sygnał impulsowy, parametrem
jest szeroko
ść
impulsów,
e) sygnał impulsowy, parametrem
jest przesuni
ę
cie fazowe impulsów
wzgl
ę
dem chwil próbkowania
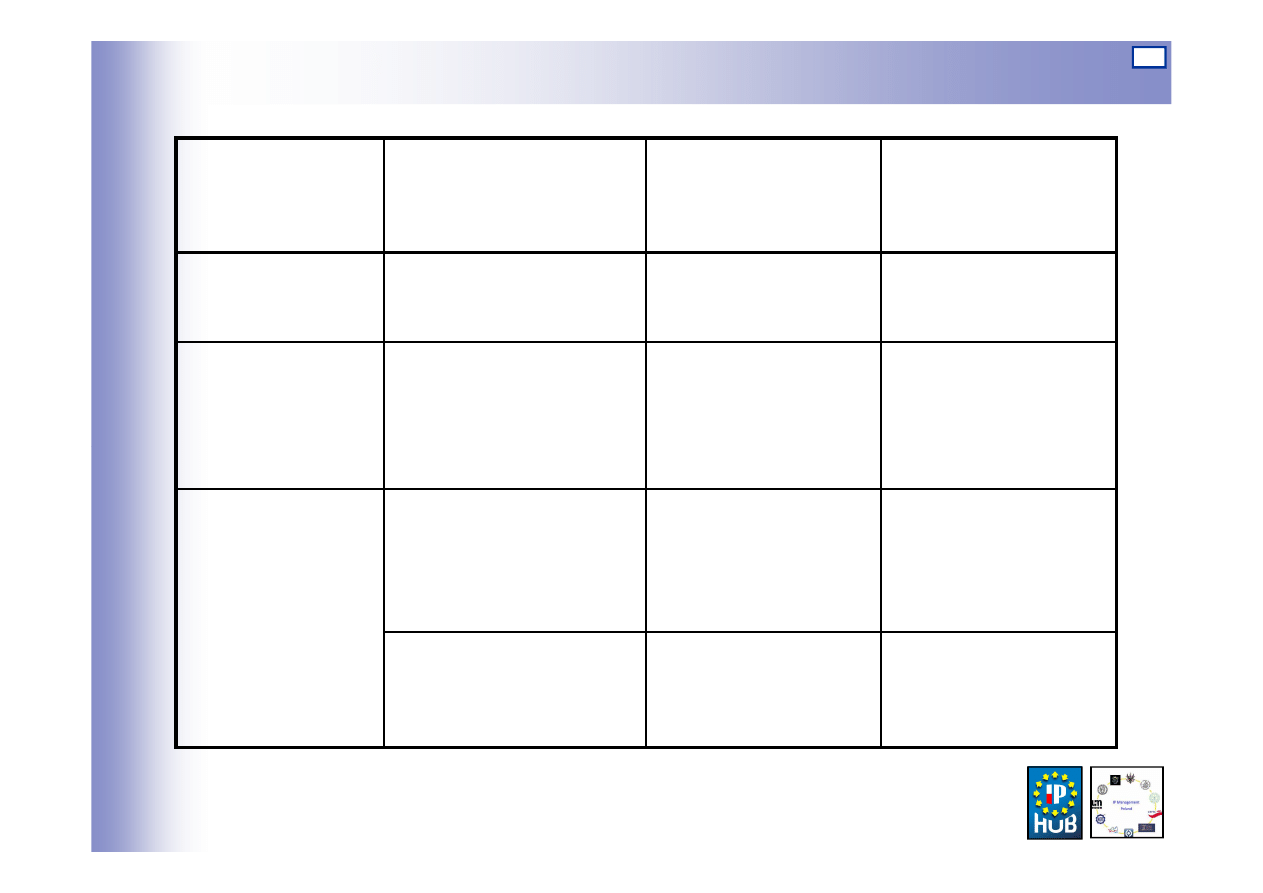
Standardowe sygnały analogowe w UA
29
Rodzaj sygnału
Wielko
ść
fizyczna
Parametr
informacji
Warto
ść
lub
zakres zmian
warto
ś
ci sygnału
Pneumatyczny
ci
ś
nienie
spr
ęż
onego powietrza
amplituda
20
÷÷÷÷
100
kPa
Hydrauliczny
ci
ś
nienie oleju
zasilaj
ą
cego
urz
ą
dzenie
amplituda
1.0 MPa
6.0 MPa
10.0 MPa
urz
ą
dzenie
10.0 MPa
16.0 MPa
Elektryczny
nat
ęż
enie pr
ą
du
stałego
amplituda
0
÷
5 mA
0
÷
10 mA
0
÷
20 mA
4
÷÷÷÷
20
mA
napi
ę
cie pr
ą
du
stałego
amplituda
0
÷
5 V
0
÷
10 V
1
÷÷÷÷
5
V
30
Sterowanie realizowane mo
ż
e by
ć
przez człowieka i mówi si
ę
wówczas
o sterowaniu r
ę
cznym lub za pomoc
ą
urz
ą
dze
ń
samoczynnie steruj
ą
cych
procesem i wówczas mówimy o sterowaniu automatycznym.
Sterowaniem nazywa si
ę
celowe oddziaływanie na dany proces, w
sposób zamierzony, maj
ą
cy doprowadzi
ć
do spełnienia okre
ś
lonego celu.
Proces, na który wywiera si
ę
oddziaływanie steruj
ą
ce, nazywa si
ę
obiektem sterowania
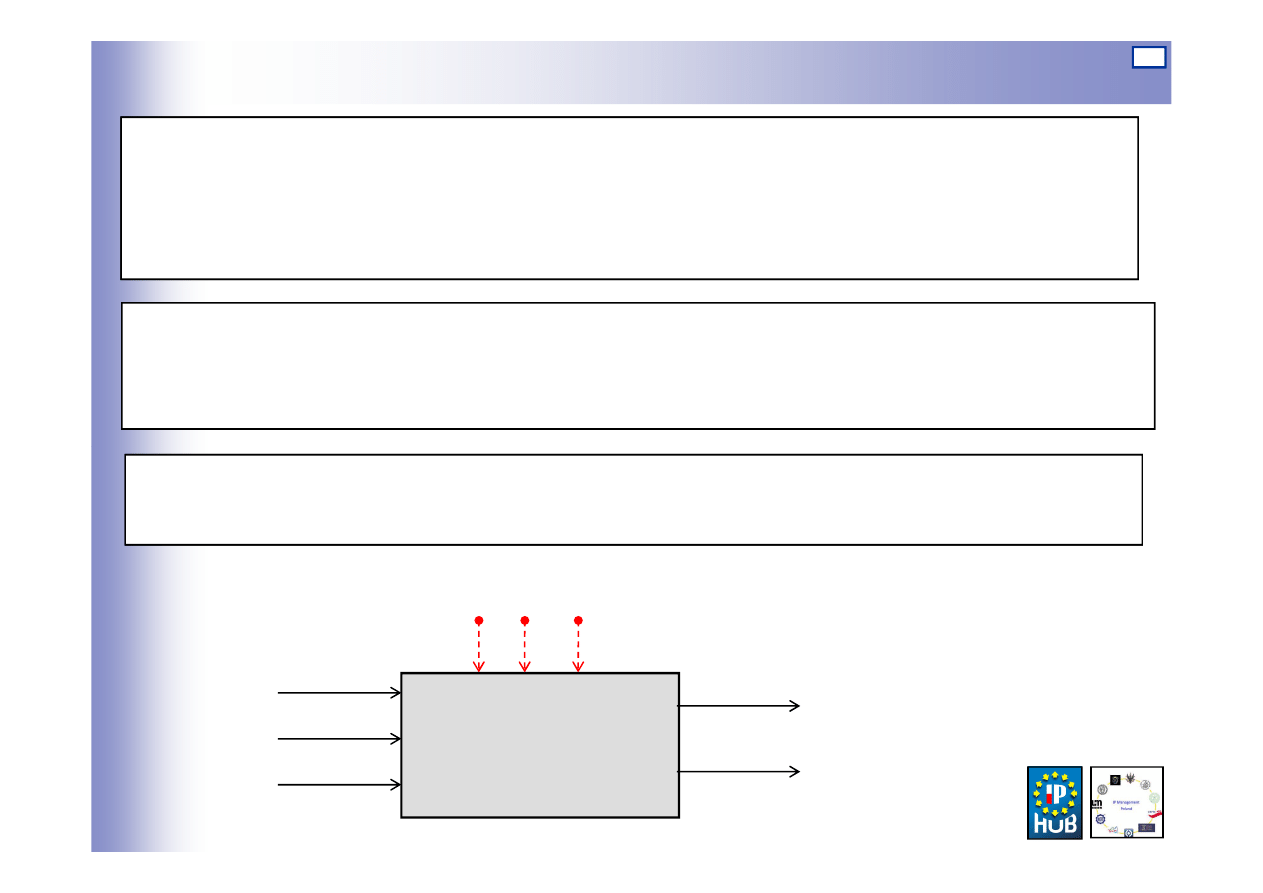
Sterowanie
Czynniki o charakterze przypadkowym, niezamierzonym,
niekontrolowanym,
utrudniaj
ą
ce
sterowanie nazywa si
ę
zakłóceniami
Wielko
ś
ci
wej
ś
ciowe
Wielko
ś
ci
wyj
ś
ciowe
obiekt sterowania
Zakłócenia
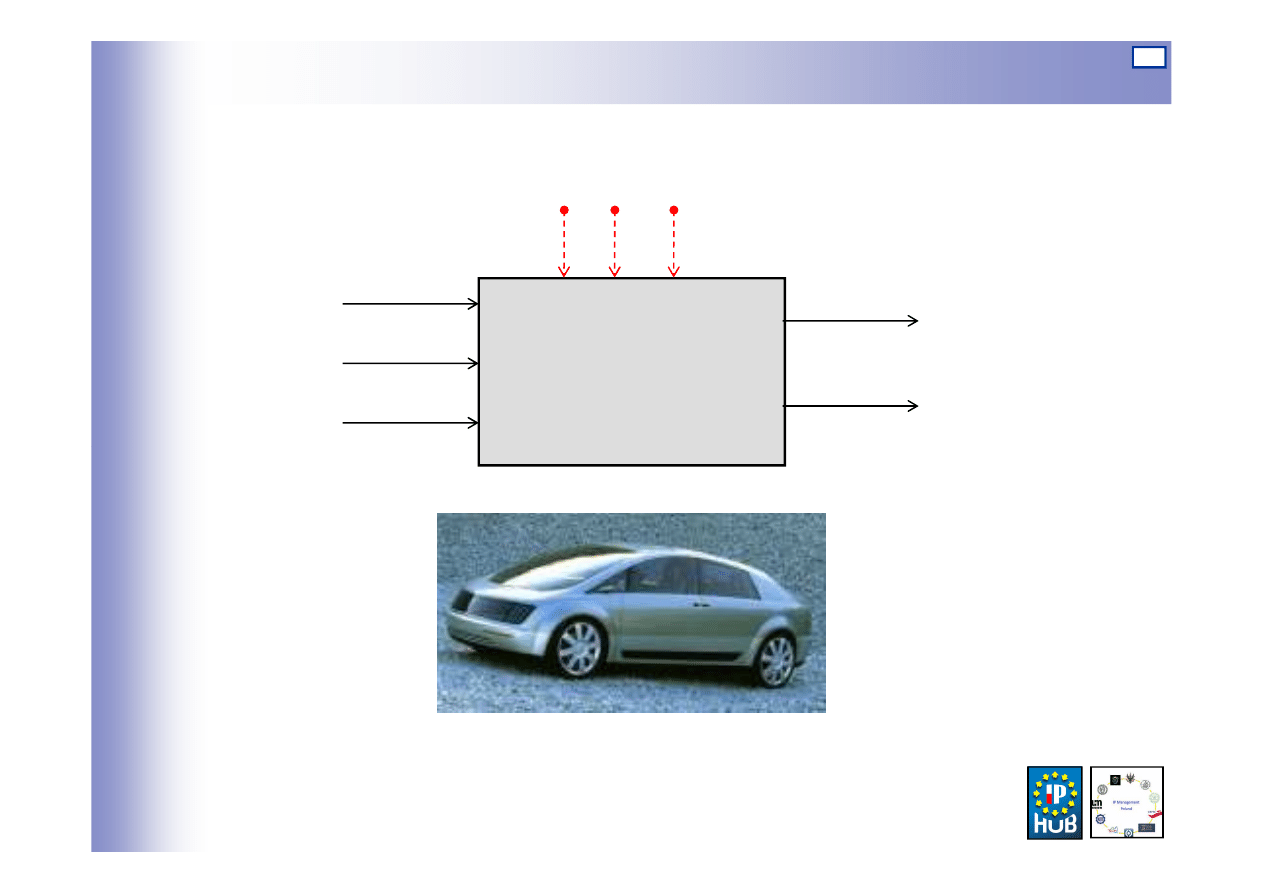
31
Samochód jako obiekt sterowania
Hamowanie
Przyspieszanie
Kierowanie
Kierunek
Pr
ę
dko
ść
Wielko
ś
ci
wej
ś
ciowe
Wielko
ś
ci
wyj
ś
ciowe
Samochód
jako obiekt sterowania
Zakłócenia
Klasyfikacja procesów
32
Procesami ci
ą
głymi nazywamy procesy, do opisu których niezb
ę
dne
s
ą
sygnały ciagłe (np. procesy regulacji temperatury, ci
ś
nienia, napi
ę
cia,
składu). Przedmiotem zainteresowa
ń
automatyki procesów ci
ą
głych s
ą
głównie układy automatycznej regulacji.
Procesami dyskretnymi nazywamy procesy, do opisu których
wykorzystuje si
ę
zmienne o sko
ń
czonej liczbie warto
ś
ci; przewa
ż
nie s
ą
to
zmienne dwuwarto
ś
ciowe.
zmienne dwuwarto
ś
ciowe.
Procesy, do opisu których wykorzystuje si
ę
zmienne dwuwarto
ś
ciowe
nazywaj
ą
si
ę
procesami binarnymi. Informacje o stanie takich procesów
przekazywane s
ą
za pomoc
ą
sygnałów dwuwarto
ś
ciowych (binarnych).
33
Klasyfikacja układów sterowania
Układy sterowania procesami ci
ą
głymi:
• otwarte
Układy sterowania :
• procesami ci
ą
głymi
• procesami dyskretnymi
• otwarte
• zamkni
ę
te (ze sprz
ęż
eniem zwrotnym)
-------------------
• ci
ą
głe
• dyskretne (kwantowane w czasie)
Układy sterowania logicznego
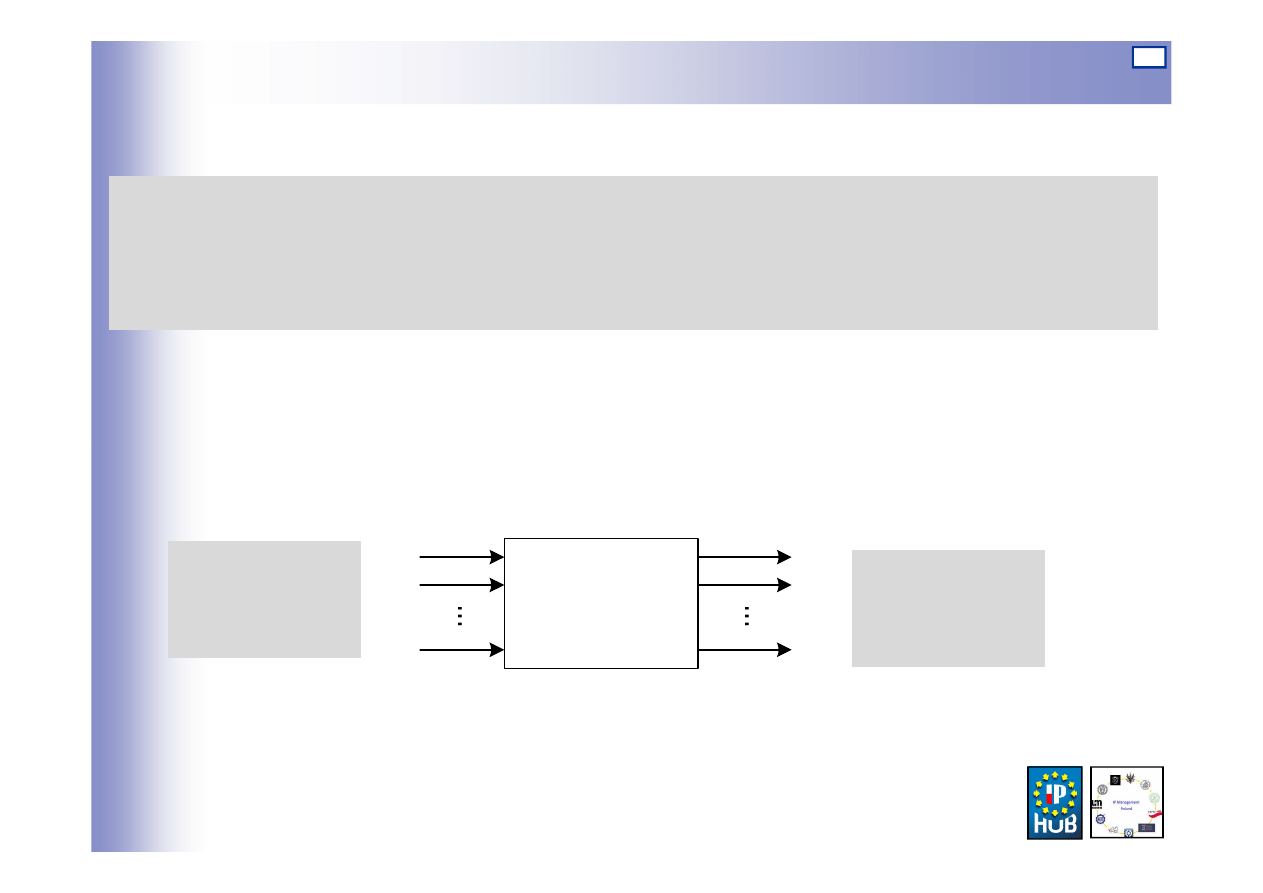
34
Układy sterowania procesami dyskretnymi o binarnych sygnałach
wyj
ś
ciowych i wej
ś
ciowych - przetwarzaj
ą
ce binarne sygnały wej
ś
ciowe na
binarne sygnału wyj
ś
ciowe, nazywane s
ą
układami sterowania logicznego
(sterowania binarnego).
Układy sterowania logicznego s
ą
tematem 2 cz
ęś
ci wykładu
1
x
2
x
n
x
1
y
2
y
m
y
układ
sterowania
logicznego
Binarne
sygnały
wej
ś
ciowe
Binarne
sygnały
wyj
ś
ciowe
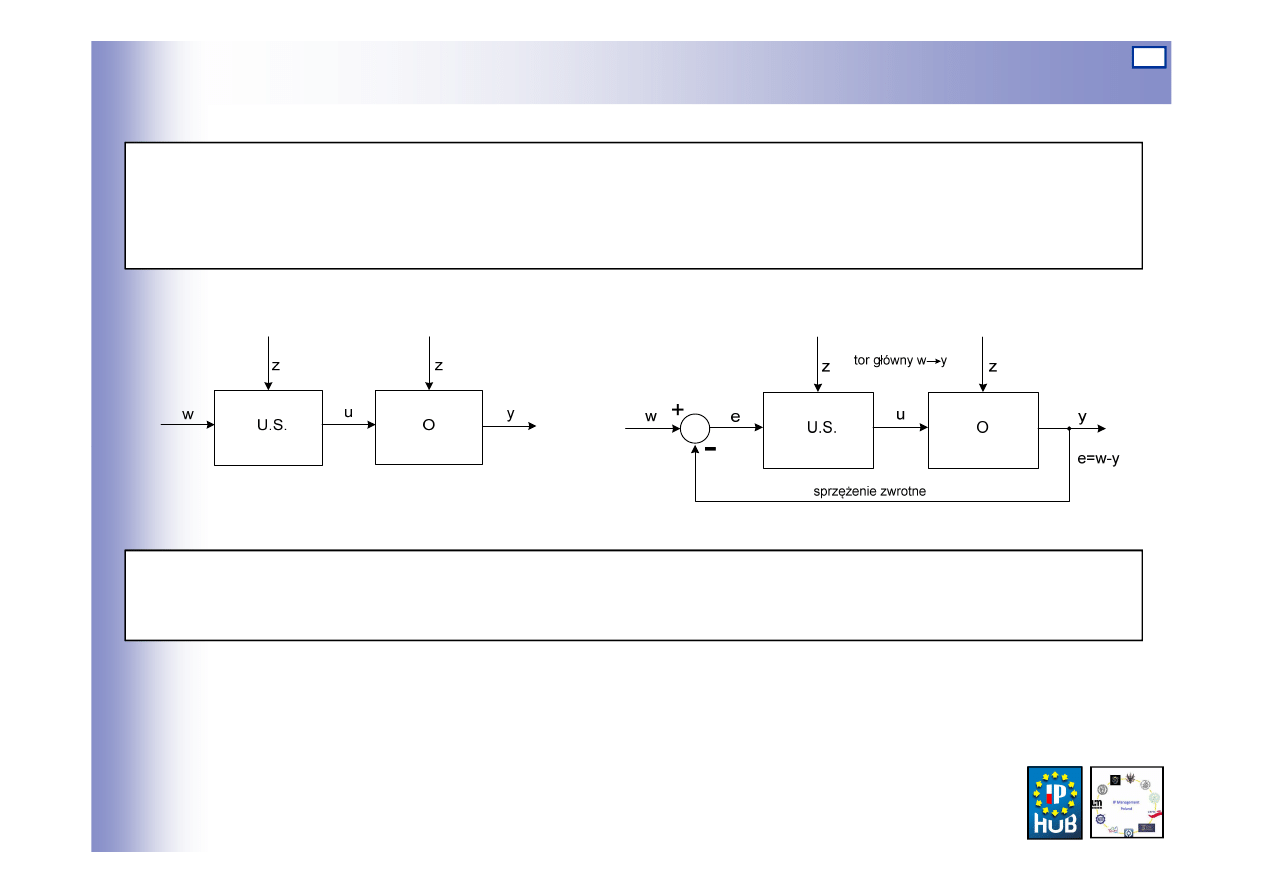
Rodzaje układów sterowania procesów ci
ą
głych
35
Sterowanie realizowane mo
ż
e by
ć
w układzie otwartym lub w układzie
zamkni
ę
tym (czyli w układzie ze sprz
ęż
eniem zwrotnym). Sterowanie
w układzie zamkni
ę
tym nazywane jest regulacj
ą
.
Sprz
ęż
enie zwrotne w układzie regulacji jest sprz
ęż
eniem zwrotnym
ujemnym.
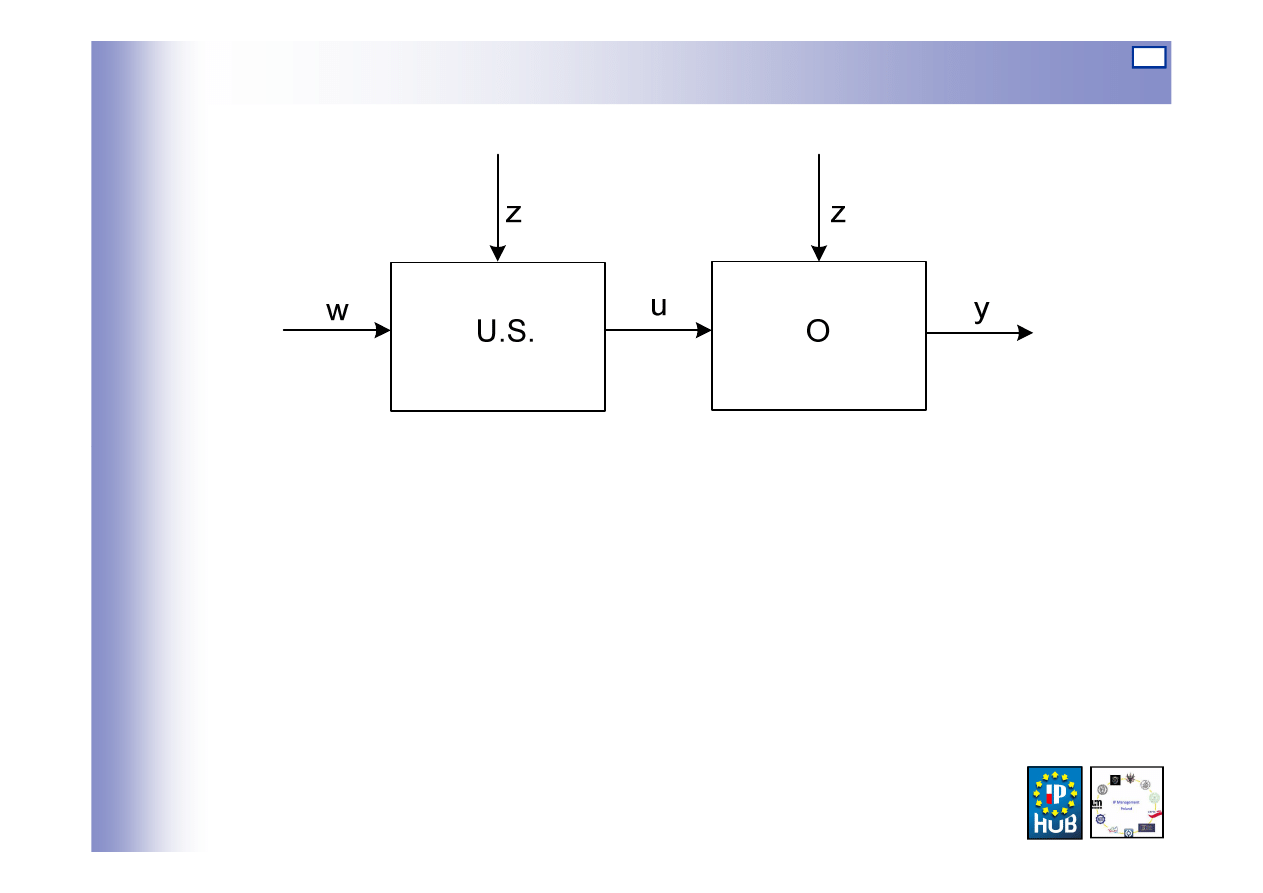
36
Sterowanie w układzie otwartym
w - warto
ść
zadana wielko
ś
ci sterowanej
u - sygnał steruj
ą
cy
y - wielko
ść
sterowana
z - sygnał zakłócaj
ą
cy
US - urz
ą
dzenie steruj
ą
ce
O – obiekt (proces) podlegaj
ą
cy sterowaniu
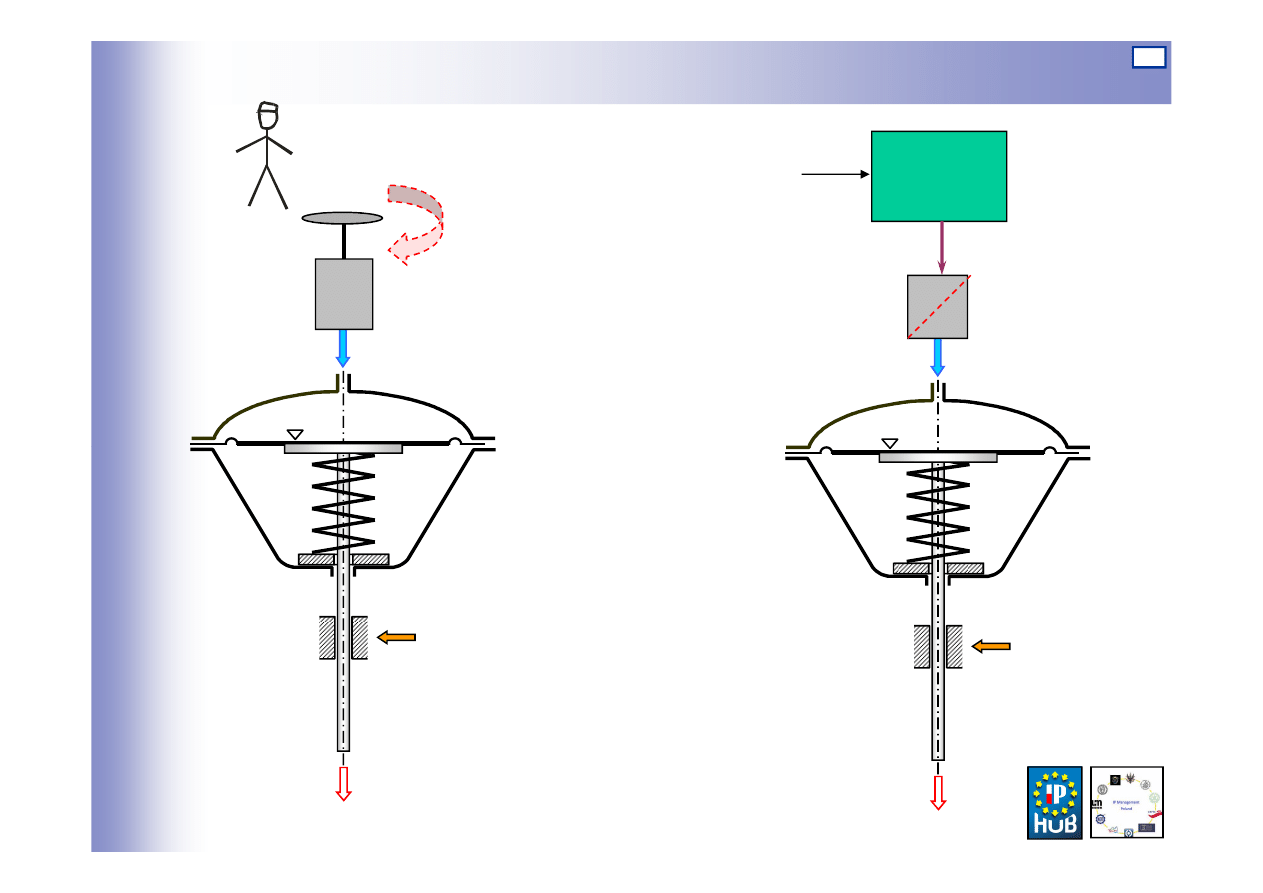
37
Sterowanie w układzie otwartym
p
s
A
e
k
d
Zadajnik
ci
ś
nienia
r
ę
czne
automatyczne
Sterownik
p
s
A
e
k
d
e
p
u
w
k
s
z
y
k
s
A
e
z
y
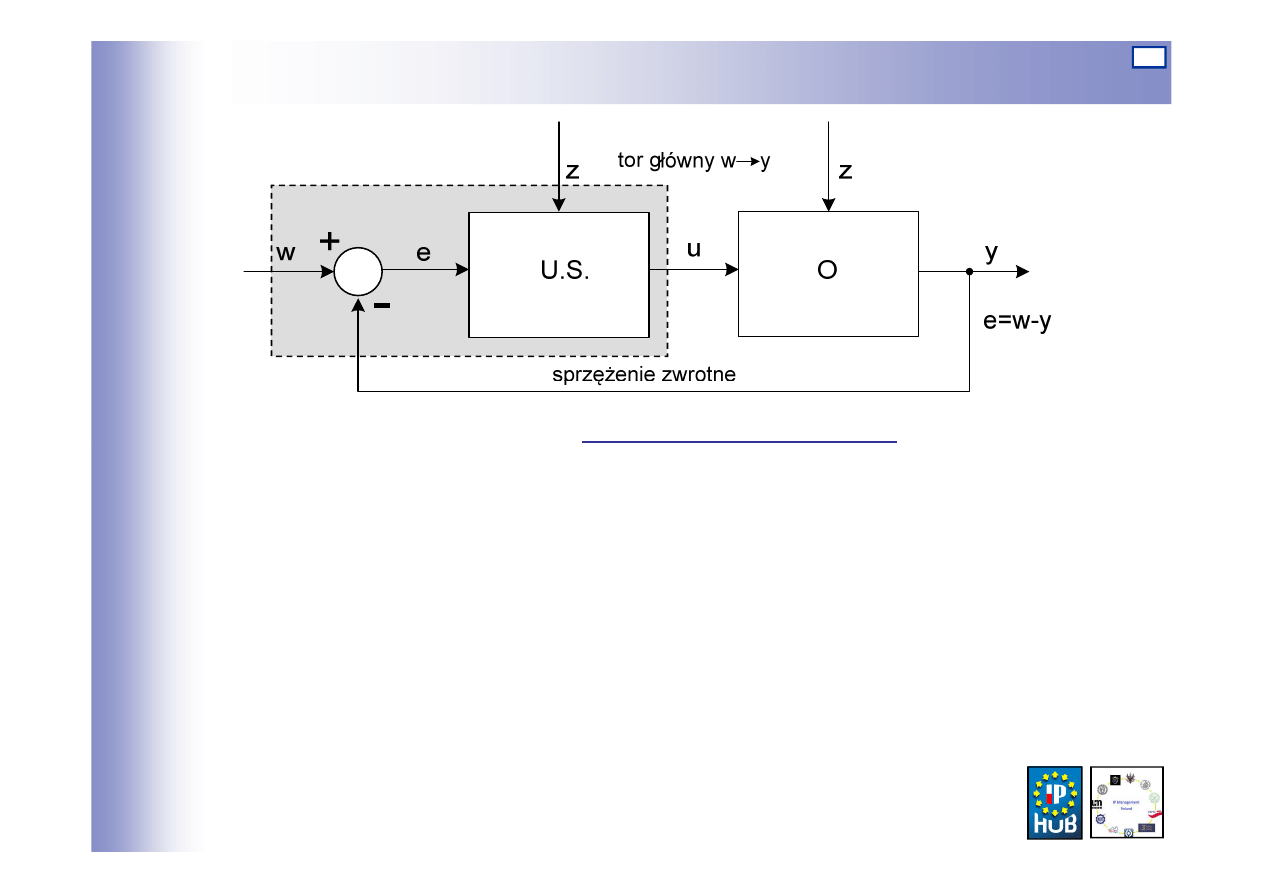
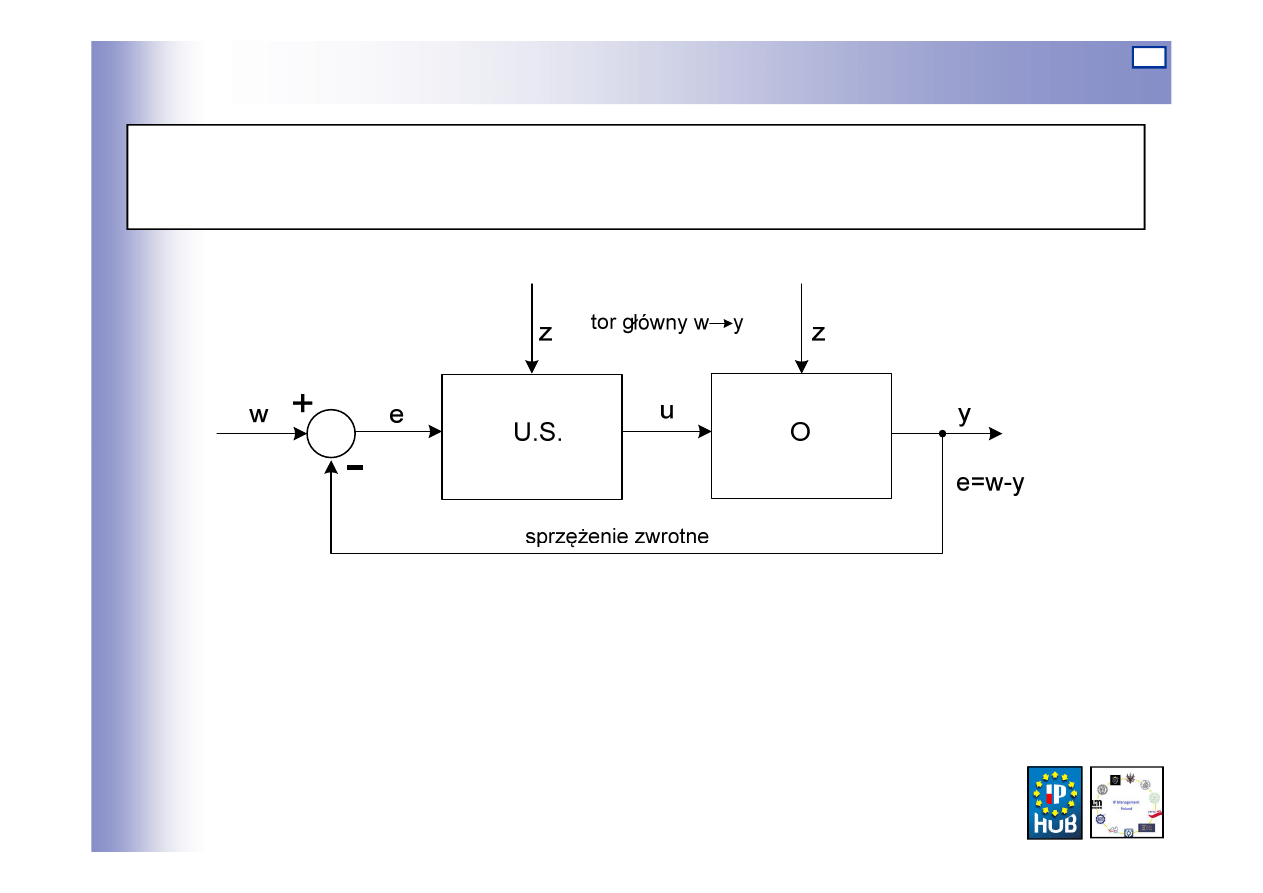
38
Sterowanie w układzie zamkni
ę
tym
Układ ze sprz
ęż
eniem zwrotnym,
y - wielko
ść
regulowana
w - warto
ść
zadana wielko
ś
ci regulowanej
e – odchyłka regulacji
u - sygnał steruj
ą
cy
z - sygnał zakłócaj
ą
cy
US - regulator
O -obiekt regulacji (proces regulowany)
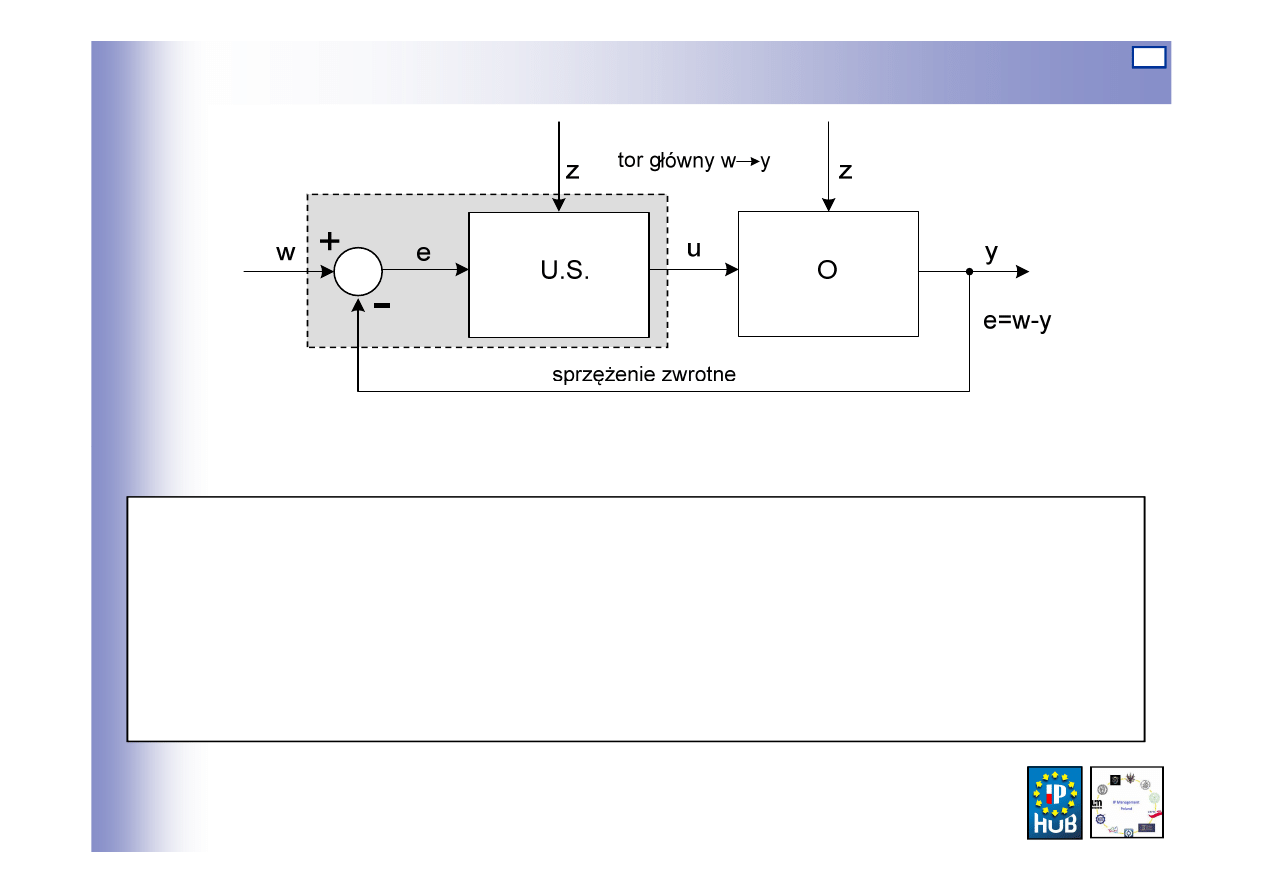
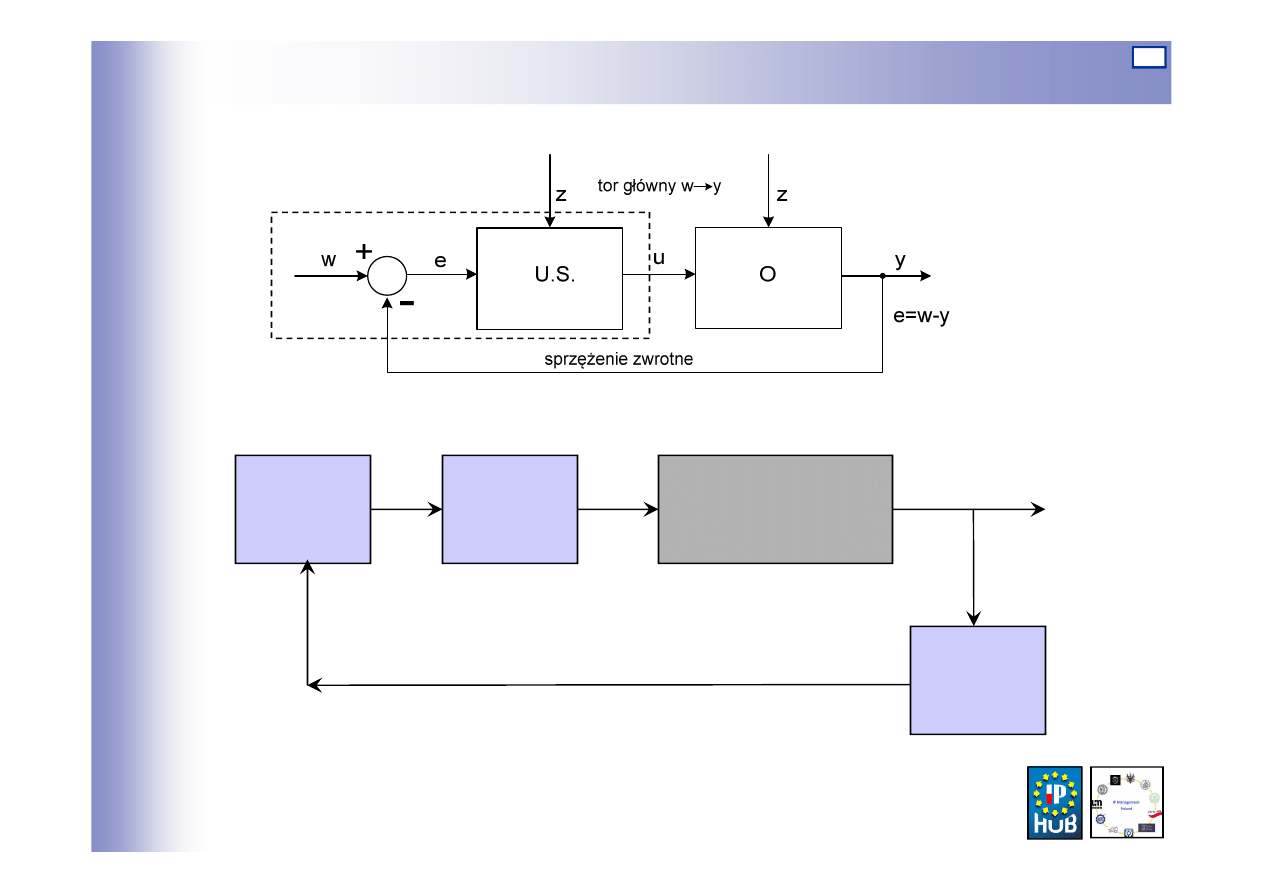
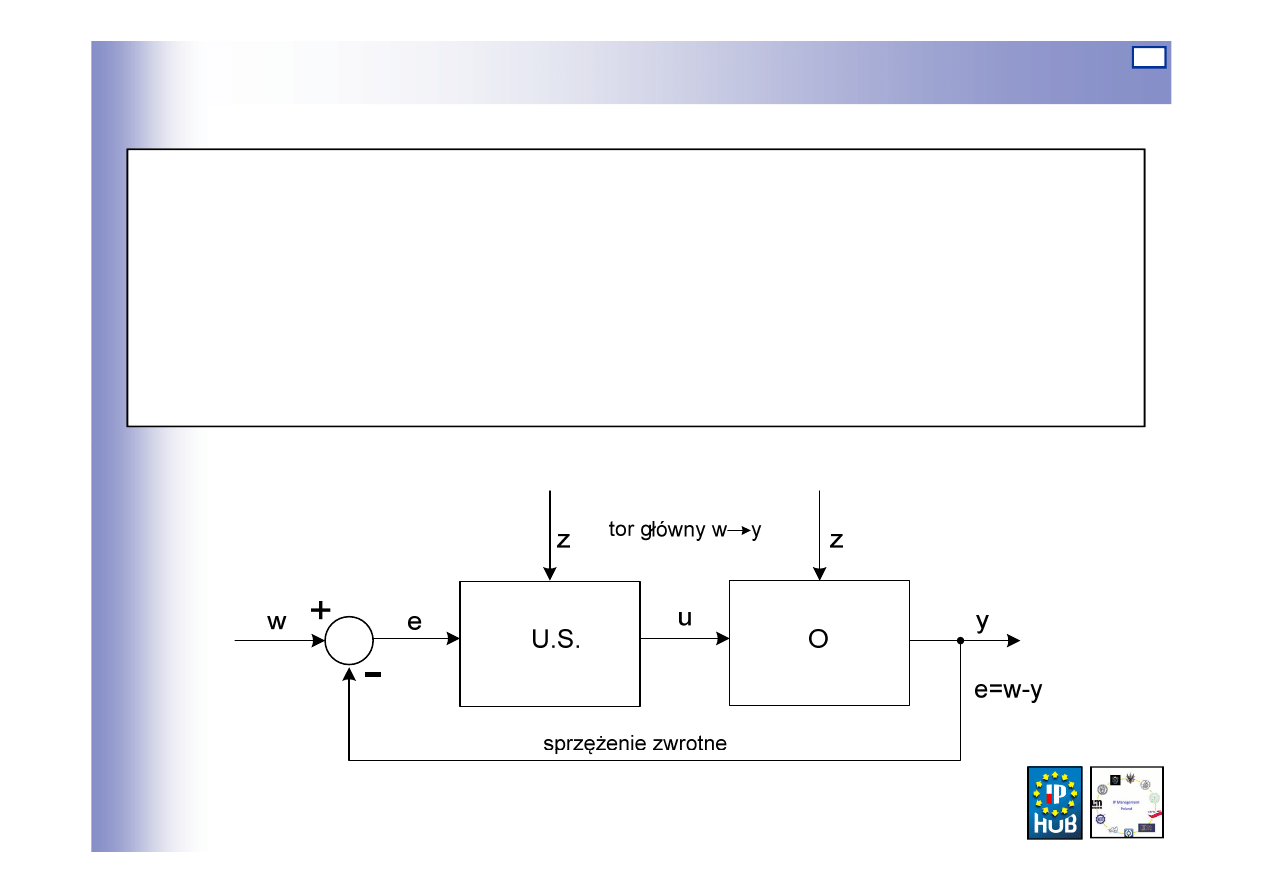
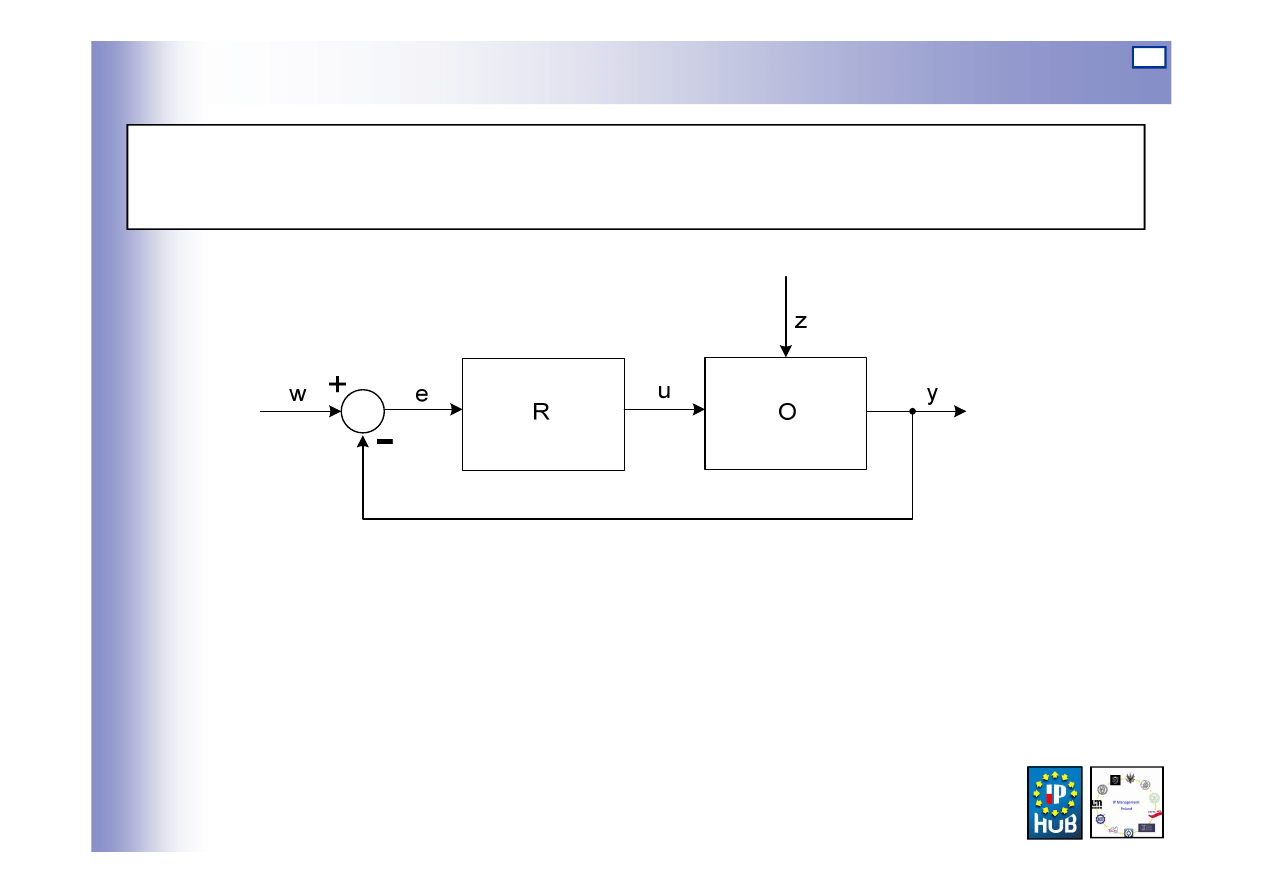
39
Sterowanie w układzie zamkni
ę
tym
Układ regulacji automatycznej
Układ regulacji automatycznej
Tor główny wskazuje zawsze zasadnicz
ą
wielko
ść
wej
ś
ciow
ą
układu
(w tym przypadku w) i wielko
ść
wyj
ś
ciow
ą
y. Tor ten ilustruje zwykle
przepływ głównego strumienia materiału lub energii w układzie.
Tor sprz
ęż
enia zwrotnego słu
ż
y do przekazywania informacji.
Zapotrzebowanie energetyczne tego toru jest zwykle pomijanie małe.
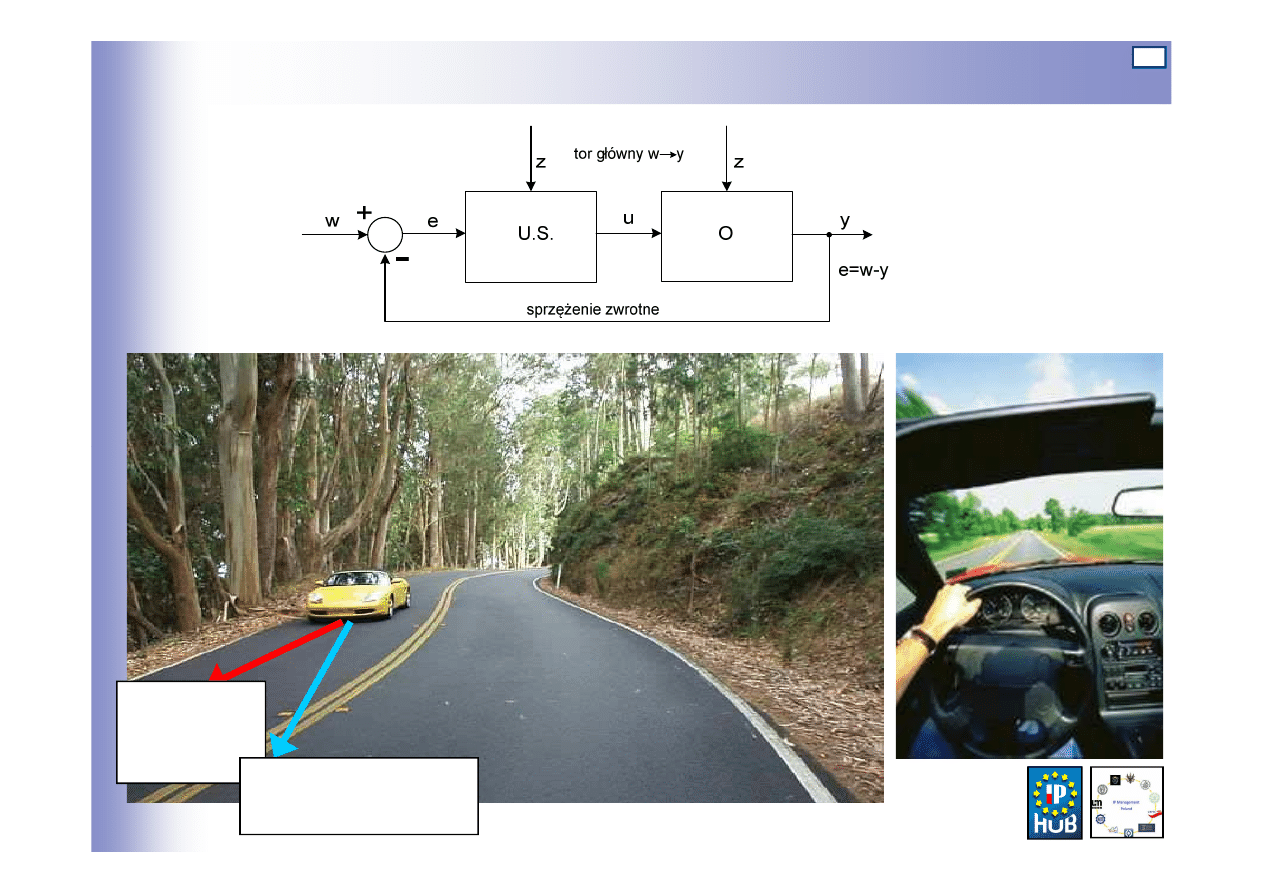
40
Sterowanie r
ę
czne w układzie zamkni
ę
tym
Po
żą
dany
kierunek
ruchu
Rzeczywisty
kierunek ruchu
Układ kierowca – samochód
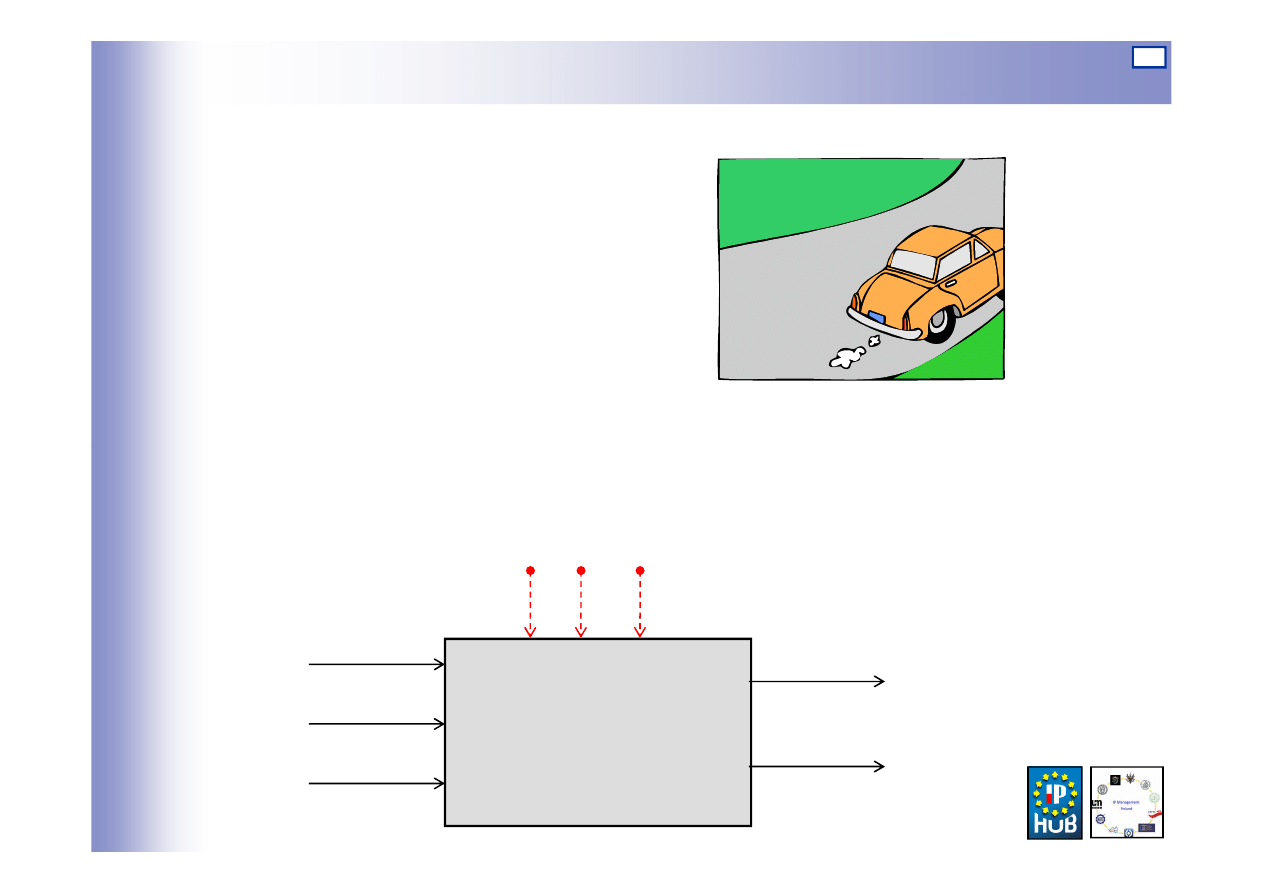
41
•
Cel:
sterowa
ć
kierunkiem
i szybko
ś
ci
ą
•
Sygnały wej
ś
ciowe - obserwacje:
rzeczywisty kierunek i szybko
ść
samochodu
•
Sygnały steruj
ą
ce:
poło
ż
enie
pedałów gazu i hamulca, k
ą
t skr
ę
cenia
kierownicy
•
Ograniczenia:
znaki drogowe,
przepisy ruchu
•
Zakłócenia
: powierzchnia drogi
•
Zakłócenia
: powierzchnia drogi
i nachylenie, wiatr, przeszkody
Hamowanie
Przyspieszanie
Kierowanie
Kierunek
Pr
ę
dko
ść
Wielko
ś
ci
wej
ś
ciowe
Wielko
ś
ci
wyj
ś
ciowe
Samochód
jako obiekt sterowania
Zakłócenia
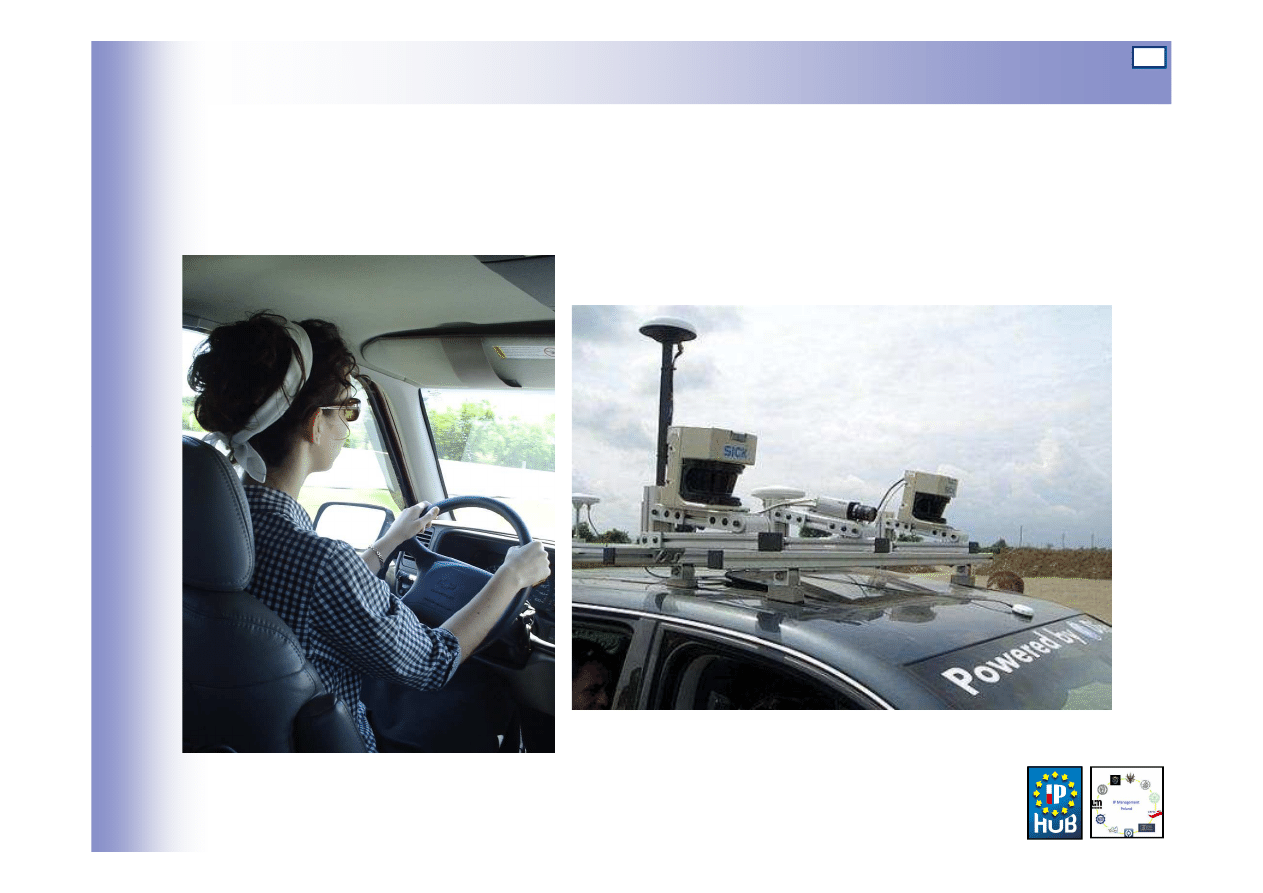
Układ kierowca – samochód
42
zmysły
→
czujniki

Układ kierowca – samochód
43
ko
ń
czyny
→
urz
ą
dzenia wykonawcze

Układ kierowca – samochód
44
mózg
→
regulator (komputer pokładowy)

Wielkie zawody DARPA
45
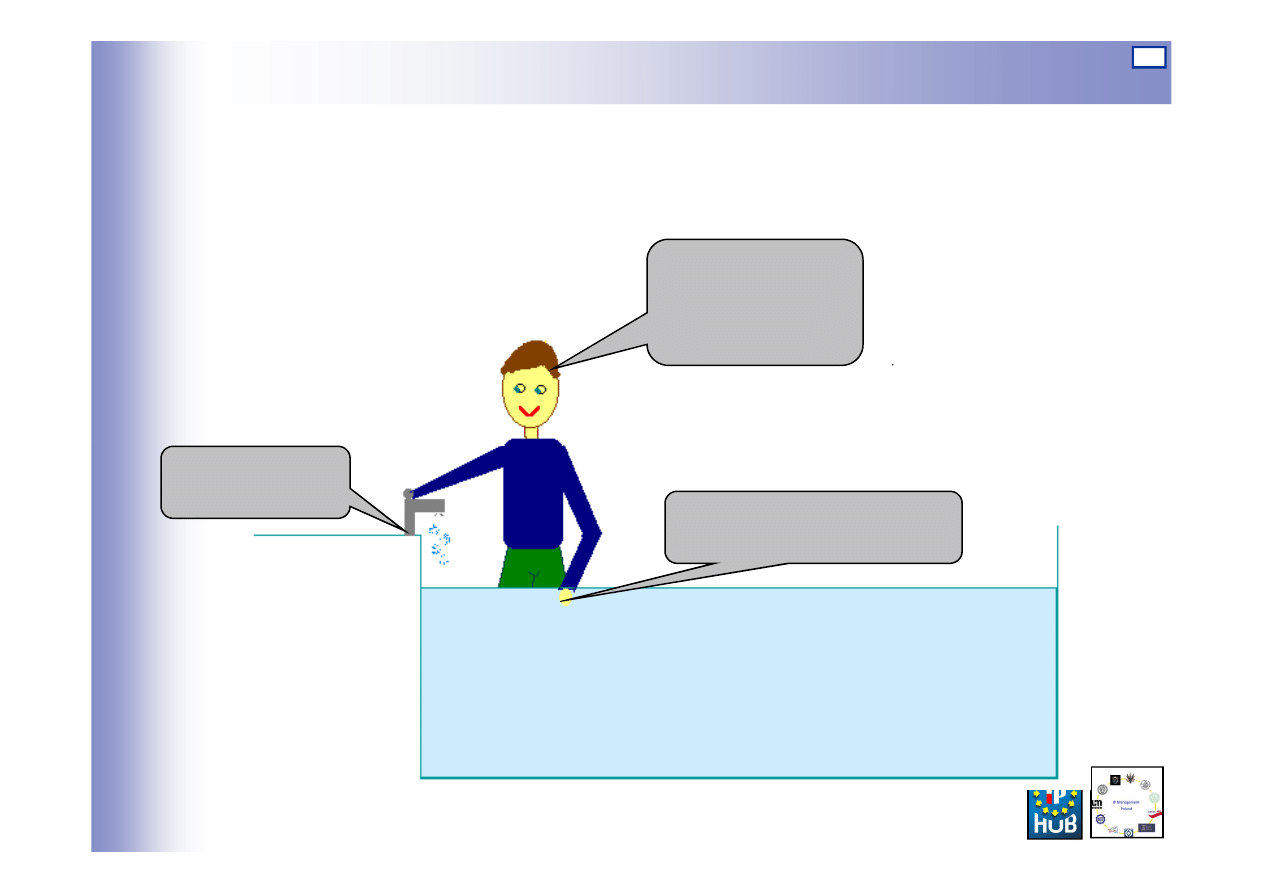
46
Sterowanie r
ę
czne w układzie zamkni
ę
tym
Regulacja ręczna temperatury wody w układzie zamkniętym
Realizacja
algorytmu
sterowania
Oddziaływanie
Pomiar temperatury
47
Regulacja automatyczna – struktura aparaturowa
Regulator
Obiekt
regulacji
Przetwornik
pomiarowy
Element
wykonawczy
u
y
y
m
w
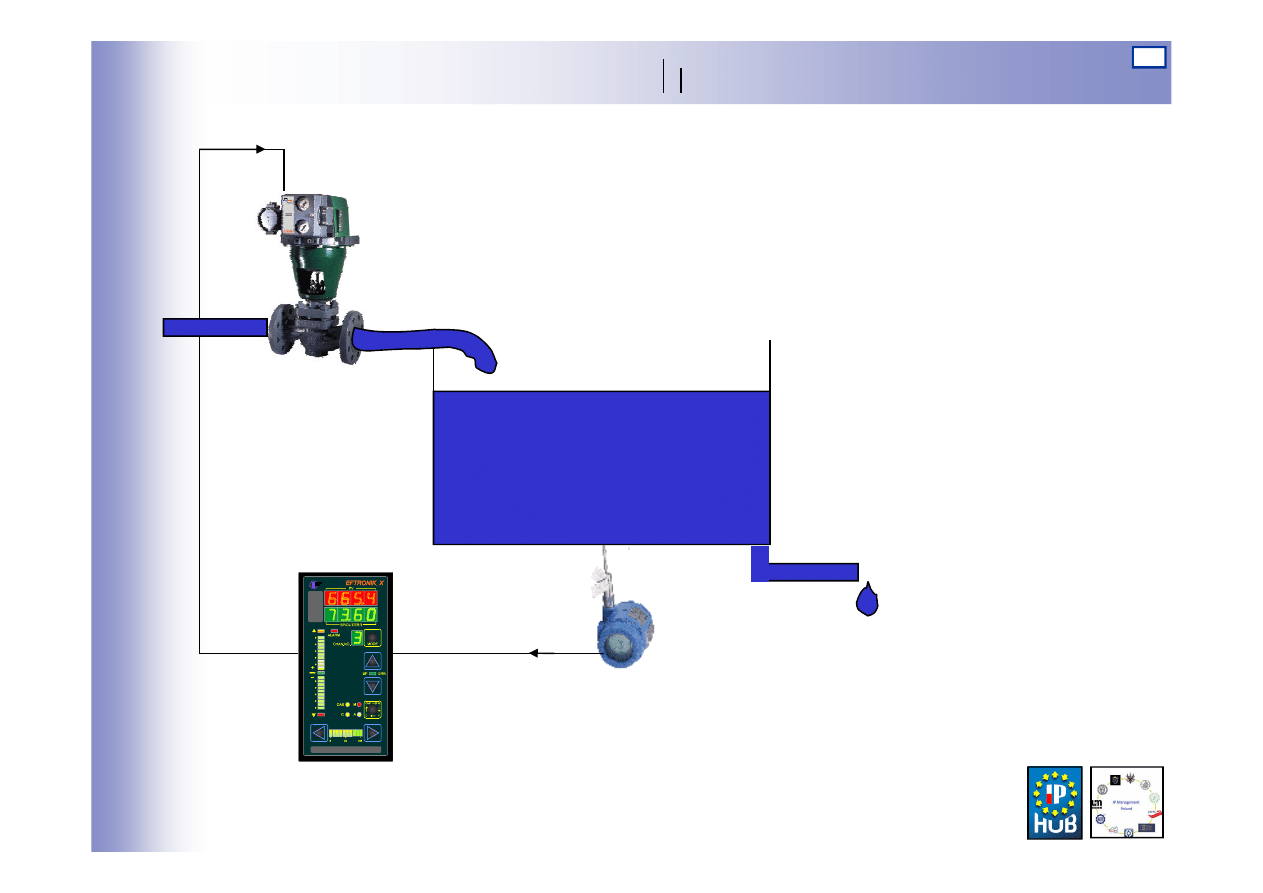
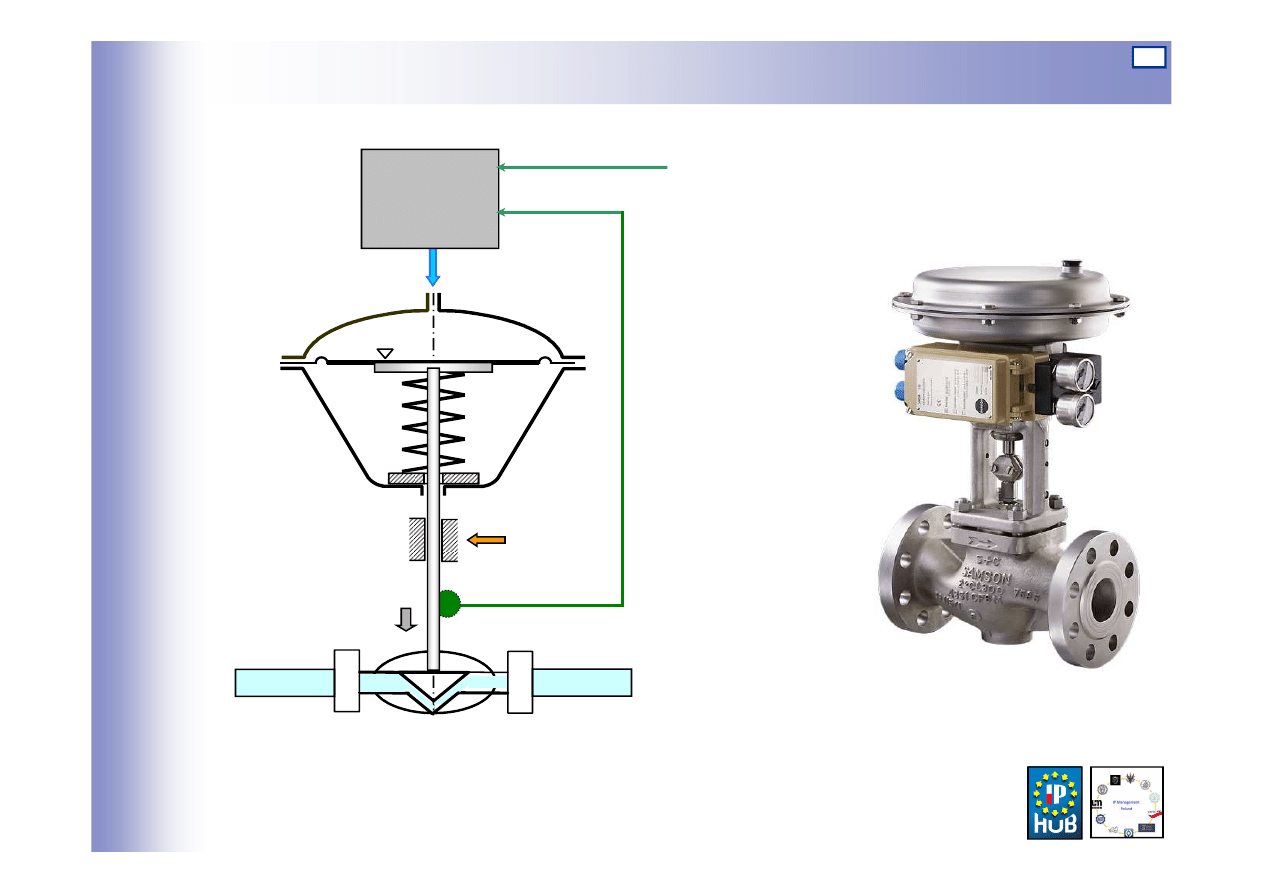
48
Regulacja automatyczna – struktura aparaturowa
Układ regulacji poziomu wody
Element wykonawczy
Obiekt regulacji:
proces zmian
Przetwornik pomiarowy
Regulator
proces zmian
poziomu w zbiorniku
y
m
u
49
Regulacja automatyczna
p
s
k
s
A
e
k
d
Regulator
Warto
ść
zadana
y
m
w
F
n
y
y
m
50
Klasyfikacja układów regulacji automatycznej
Ze wzgl
ę
du na zadanie realizowane przez układ wyró
ż
nia si
ę
:
• układy stabilizuj
ą
ce (układy regulacji stałowarto
ś
ciowej), w=const
• układy programowe (regulacji programowej), w=w(t)
• układy nad
ąż
ne (serwomechanizmy), w=w[
ϕ
(t)]
• inne
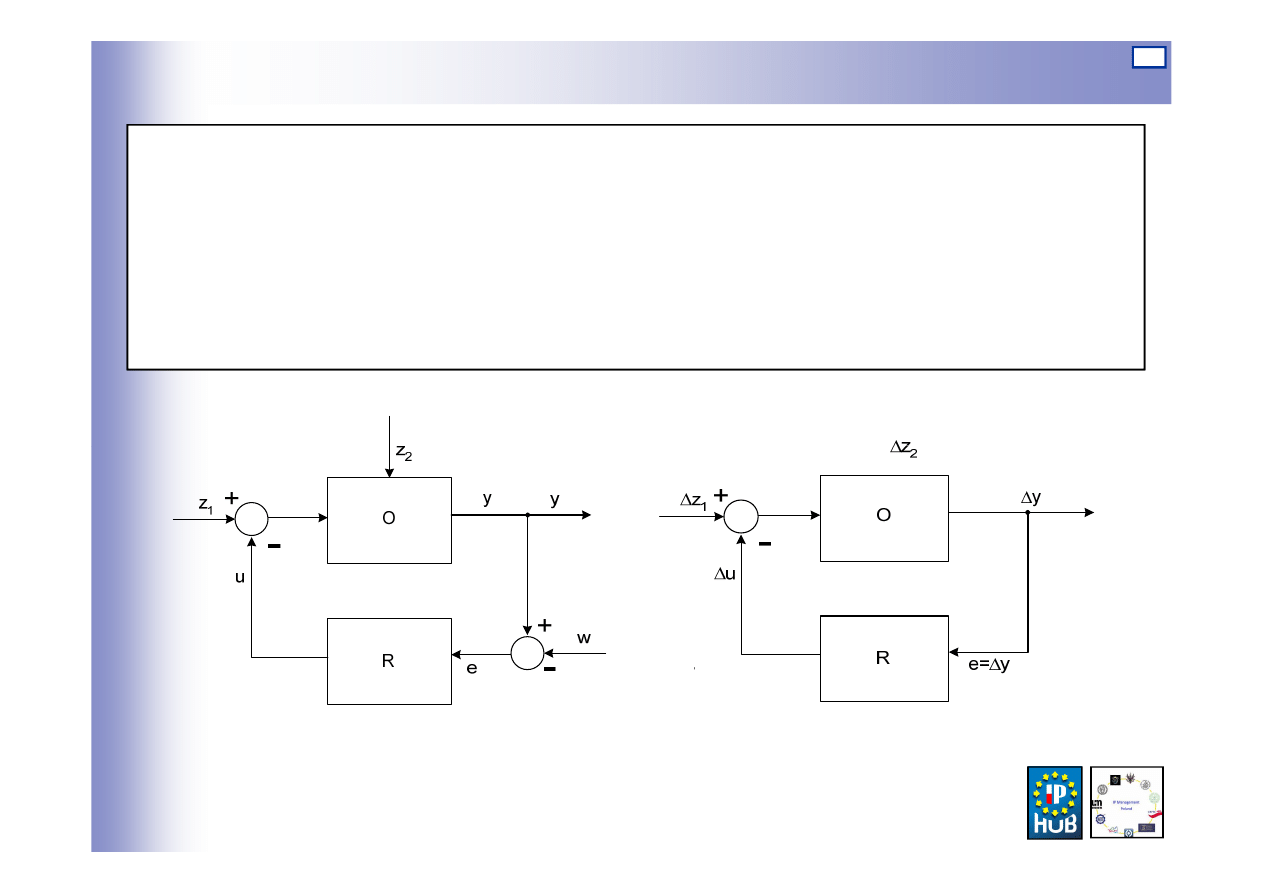
51
Układy stabilizuj
ą
ce
Zadaniem układu jest utrzymanie mo
ż
liwie stałej, po
żą
danej warto
ś
ci
wielko
ś
ci wyj
ś
ciowej oraz minimalizacja wpływu zakłóce
ń
na t
ę
wielko
ść
.
Cz
ę
sto główne zakłócenia wchodz
ą
wraz ze strumieniem materiału lub
energii na obiekt, tworz
ą
c tor główny od z
1
do y.
Przykłady: regulacja ci
ś
nienia, poziomu cieczy,
nat
ęż
enia przepływu, pH itd.
52
Układy regulacji programowej
Zadaniem układu jest uzyskanie przewidzianych okre
ś
lonym programem
czasowym zmian wielko
ś
ci regulowanej (sterowanej)
Przykłady:
• programowa regulacja temperatury w budynku mieszkalnym
• programowa regulacja temperatury w piecu hartowniczym
• programowa regulacja jednej lub kilku wielko
ś
ci w procesie rozruchu
(stopniowe dochodzenie do nominalnego stanu pracy)
53
Układy nad
ąż
ne
Zadaniem układu jest nad
ąż
anie wielko
ś
ci wyj
ś
ciowej y za zmieniaj
ą
c
ą
si
ę
w nieznany nam sposób warto
ś
ci
ą
zadan
ą
w
Przykłady:
• sterowanie poło
ż
eniem y dział przeciwlotniczych wg wskaza
ń
radaru
okre
ś
laj
ą
cego poło
ż
enie w samolotu
• sterowanie poło
ż
eniem y pisaka rejestratora wg aktualnej warto
ś
ci w
mierzonej i rejestrowanej wielko
ś
ci fizycznej
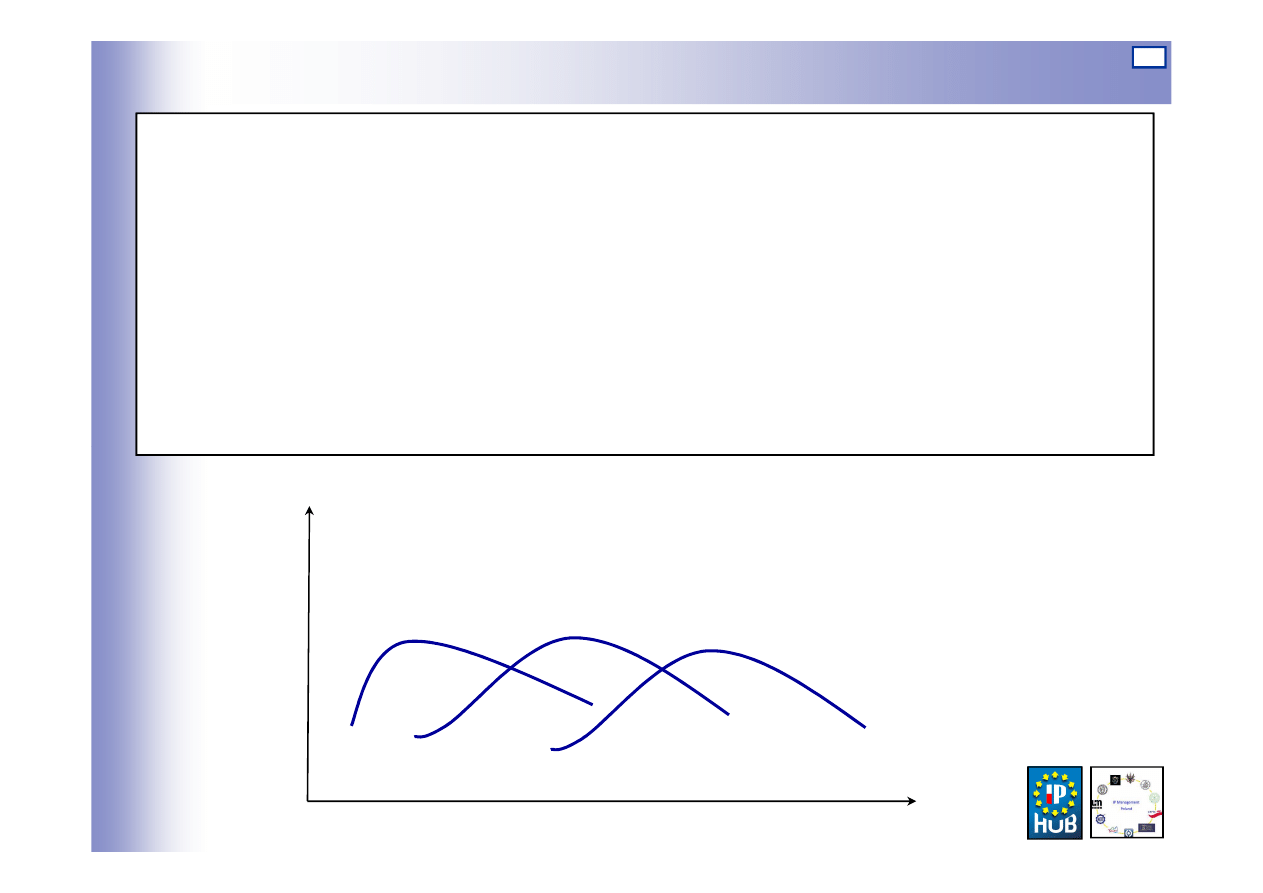
54
Układy sterowania optymalnego
Zadaniem układu jest utrzymywanie wielko
ś
ci regulowanej na warto
ś
ci
ekstremalnej.
Poło
ż
enie ekstremum zazwyczaj nie jest stałe i zale
ż
y od warto
ś
ci
sygnałów zakłócaj
ą
cych
Optymalizacja przebiegu procesów - np. minimalizacja zu
ż
ycia energii,
minimalizacja kosztów lub maksymalizacja zysku przy zało
ż
onych
ograniczeniach
z=a
z=b
z=v
y
u
55
Układy ci
ą
głe i dyskretne w czasie
Układy ci
ą
głe – zmiany wej
ś
cia obiektu oraz obserwacje (pomiary) wyj
ś
cia
mog
ą
odbywa
ć
si
ę
w ka
ż
dym momencie t .
W opisie układu wyst
ę
puj
ą
wtedy funkcje czasu u(t), y(t), itp.
Układy dyskretne (w czasie) – zmiany wej
ś
cia obiektu oraz obserwacje
Układy dyskretne (w czasie) – zmiany wej
ś
cia obiektu oraz obserwacje
(pomiary) wyj
ś
cia mog
ą
odbywa
ć
si
ę
w
ś
ci
ś
le okre
ś
lonych
chwilach, zwykle równoodległych -
∆
t
W opisie układu wyst
ę
puj
ą
wtedy dyskretne funkcje czasu, czyli ci
ą
gi: u(k),
y(k), itp., gdzie k oznacza numer kolejnego taktu
Sterowanie komputerowe ma charakter dyskretny.
56
Układy liniowe i nieliniowe
układu fizycznego na
Układy liniowe – układy, które zawieraj
ą
wył
ą
cznie elementy liniowe, tzn.
elementy o liniowych charakterystykach statycznych, opisywane
za pomoc
ą
liniowych równa
ń
ró
ż
niczkowych lub ró
ż
nicowych
Spełniaj
ą
zasad
ę
superpozycji: odpowied
ź
układu fizycznego na
kilka wymusze
ń
, równa si
ę
sumie odpowiedzi na ka
ż
de
wymuszenie z osobna.
Rzeczywiste układy s
ą
nieliniowe, ale w wielu przypadkach z
Rzeczywiste układy s
ą
nieliniowe, ale w wielu przypadkach z
zadawalaj
ą
cym przybli
ż
eniem mo
ż
na opisa
ć
działanie układu nieliniowego,
linearyzuj
ą
c jego charakterystyki w otoczeniu nominalnego punktu pracy
Układy nieliniowe – układy, które zawieraj
ą
chocia
ż
jeden element
nieliniowy
57
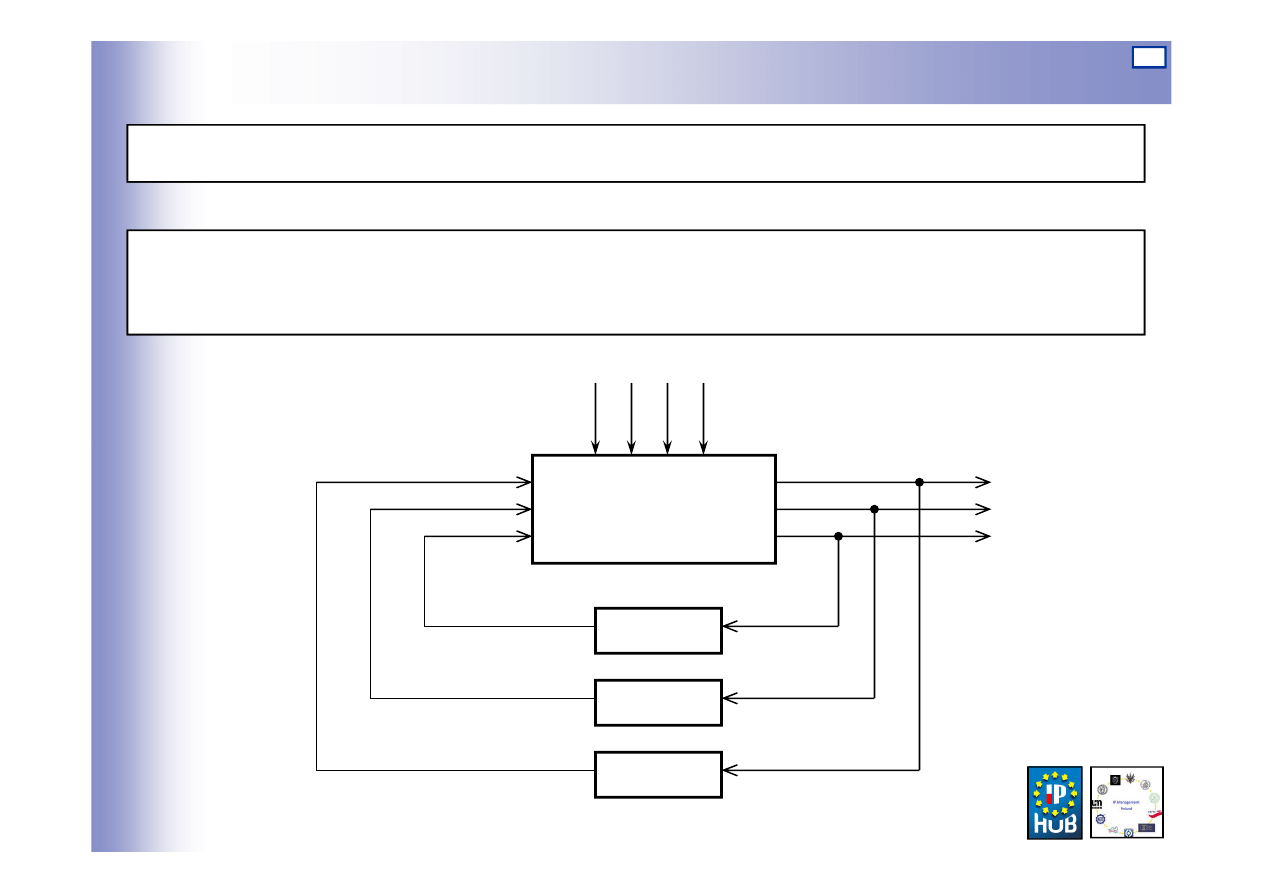
Układy jedno- i wielowymiarowe
Układy jednowymiarowe – układy o jednym wej
ś
ciu i jednym wyj
ś
ciu
Układy wielowymiarowe – wielko
ś
ci u oraz y s
ą
wektorami (wiele wej
ść
i wiele wyj
ść
)
Obiekt
Reg. 1
Reg. 2
Reg. 3
u
1
u
2
u
3
y
1
y
2
y
3
58
Układ sterowania jako system informacyjny
Systemy informacyjne (5P):
• Pozyskiwanie informacji (pomiary)
• Przesyłanie informacji (sieci Fieldbus, LAN i WAN)
• Przechowywanie informacji (bazy danych relacyjne i czasu
rzeczywistego – historiany)
• Przetwarzanie informacji (sterowniki, komputery)
• Przetwarzanie informacji (sterowniki, komputery)
• Prezentacja informacji (wizualizacja – panele i stacje operatorskie)
Systemy sterowania s
ą
systemami informacyjnymi (5P), a tak
ż
e
systemami informatycznymi.
Wyszukiwarka
Podobne podstrony:
1. Wprowadzenie tryb zgodnosci
1 FP Wprowadzenie tryb zgodnosci
1 Wprowadzenie tryb zgodnosci
Ek w 1, Wprowadzenie do ekonomii, 17lut11 [tryb zgodności]
Wyklad 1 Wprowadzenie zarządzanie podatkami w przedsiębiorstwie [tryb zgodności]
Ek w 1, Wprowadzenie do ekonomii, 17lut11 [tryb zgodności]
002 Wprowadzenie do teorii decyzji tryb zgodno ci
2012 KU W5 tryb dzienny moodle tryb zgodnosci
(W7a Stale do kszta t na zimno cz I [tryb zgodno ci])
2 Sieci komputerowe 09 03 2013 [tryb zgodności]
Microsoft PowerPoint IP5 klasyfikacje tryb zgodnosci
Microsoft PowerPoint IP tryb zgodnosci
PA2 opis matematyczny [tryb zgodności]
ATMOSFERA [tryb zgodnosci]a id Nieznany
(Rachunkowosc podatkowa wyklad 4 5 [tryb zgodności])
więcej podobnych podstron