1
PODSTAWOWE CZŁONY DYNAMICZNE
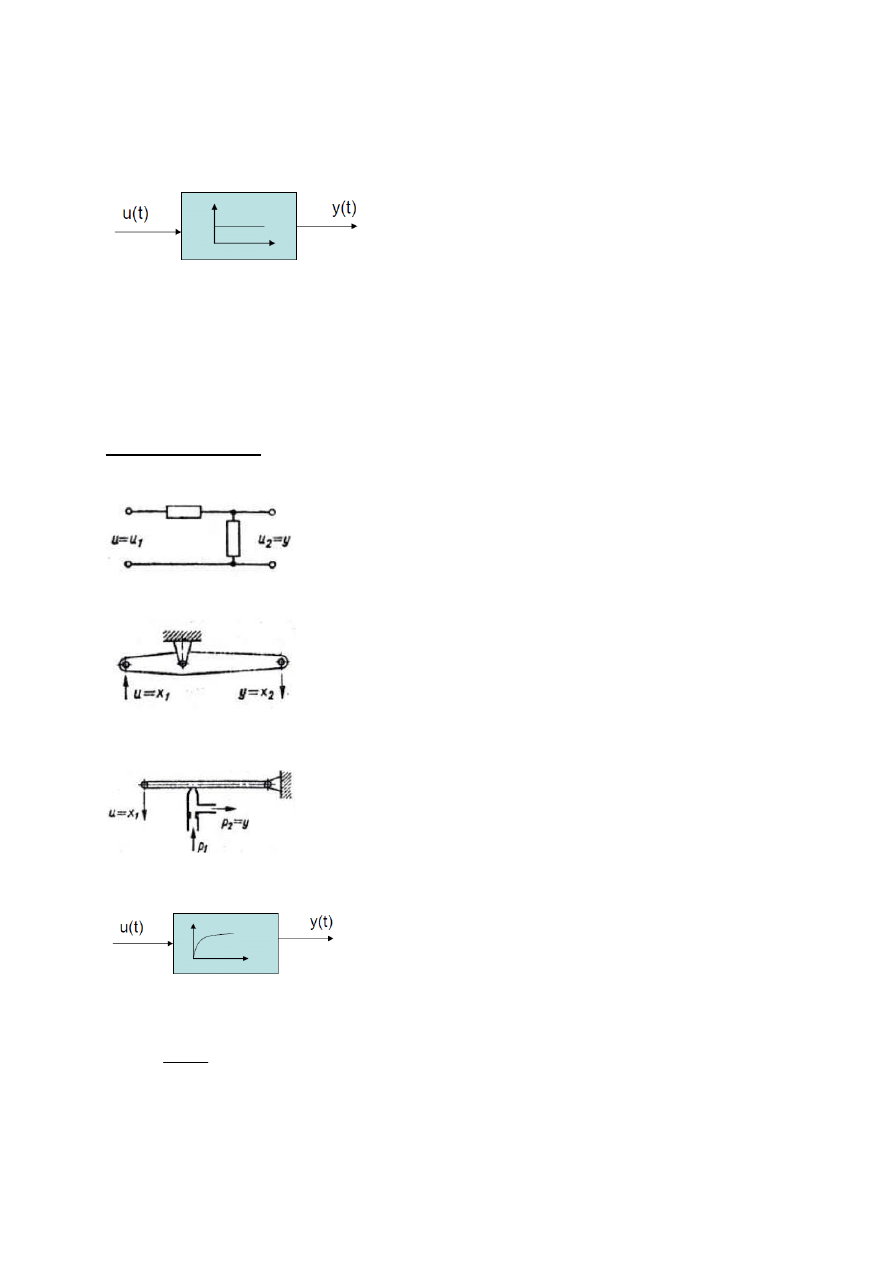
1. Człon proporcjonalny
Odpowiedź skokowa
)
(
)
(
t
u
k
t
y
⋅
=
k
s
K
=
)
(
(transmitancja)
k - współczynnik wzmocnienia statycznego
Przykłady realizacji
- dzielnik napięcia (napięcie elektryczne – napięcie elektryczne)
- dźwignia (przesunięcie - przesunięcie)
- układ pneumatyczny (przesunięcie - ciśnienie powietrza)
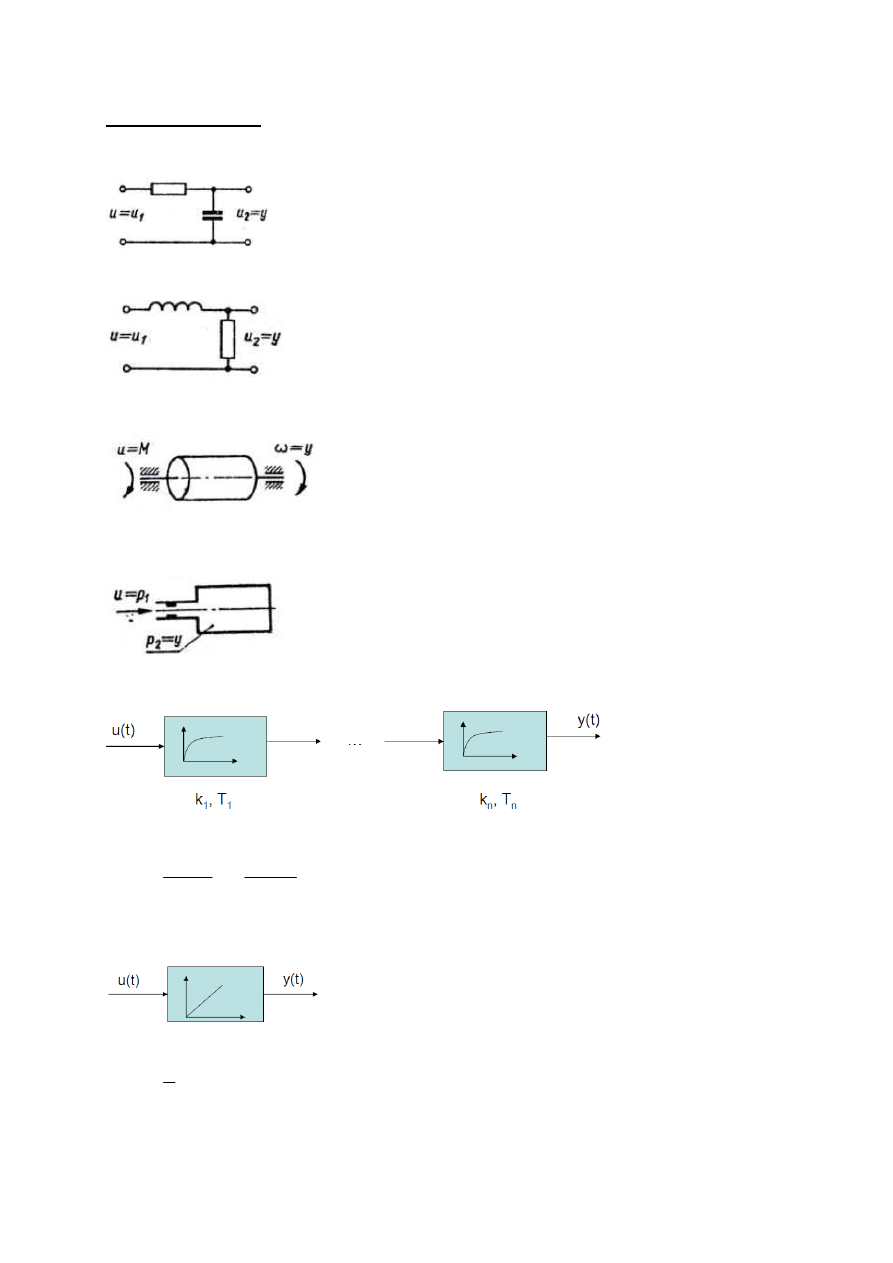
2. Człon inercyjny 1-go rzędu
Odpowiedź skokowa
sT
k
s
K
+
1
=
)
(
(transmitancja)
k - współczynnik wzmocnienia statycznego
T - stała czasowa
2
Przykłady realizacji
- układ RC (napięcie elektryczne – napięcie elektryczne)
- układ LR (napięcie elektryczne – napięcie elektryczne)
- układ mechaniczny (moment - prędkość obrotowa)
- układ pneumatyczny (ciśnienie powietrza – ciśnienie powietrza)
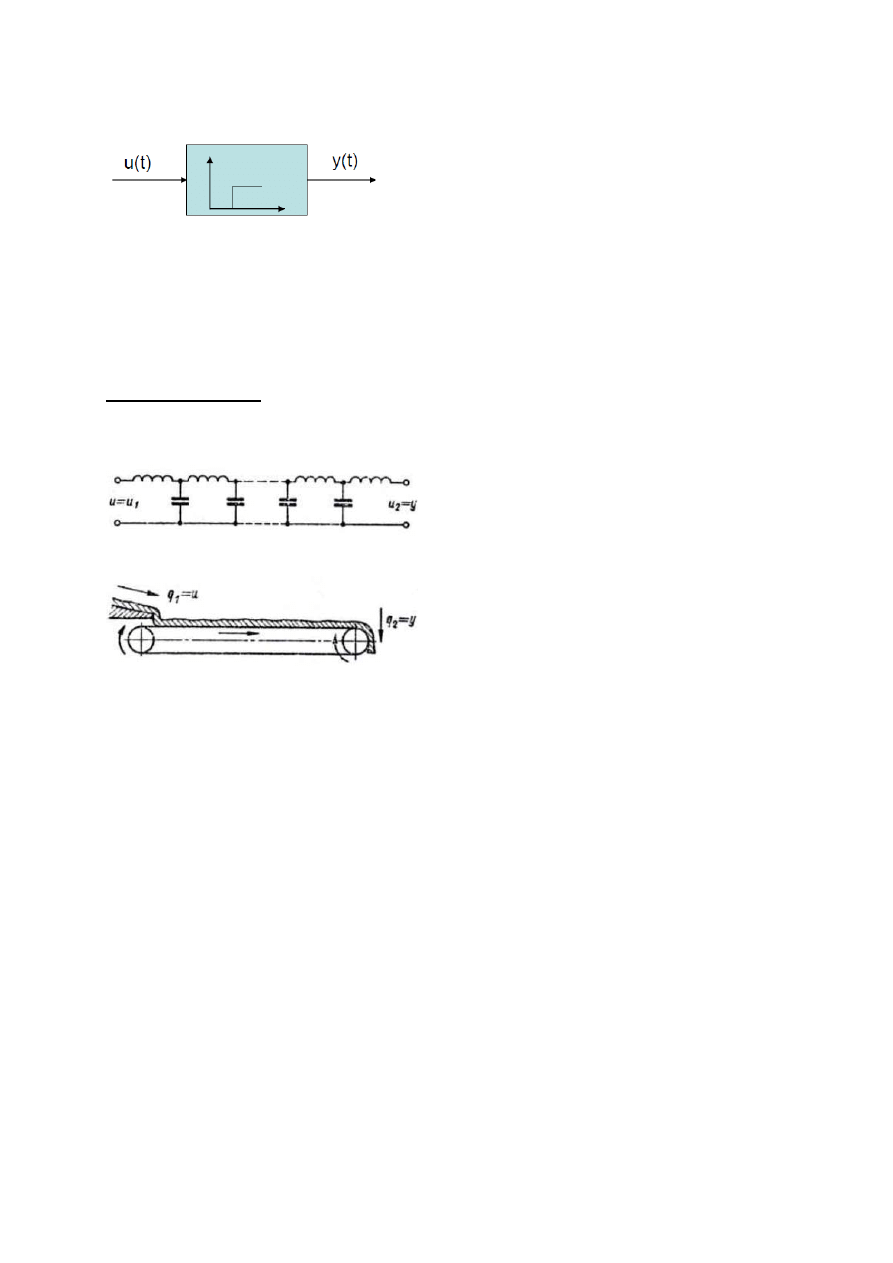
3. Człon inercyjny n-tego rzędu
Odpowiedź skokowa
n
n
sT
k
sT
k
s
K
+
1
⋅
⋅
+
1
=
1
1
...
)
(
(transmitancja)
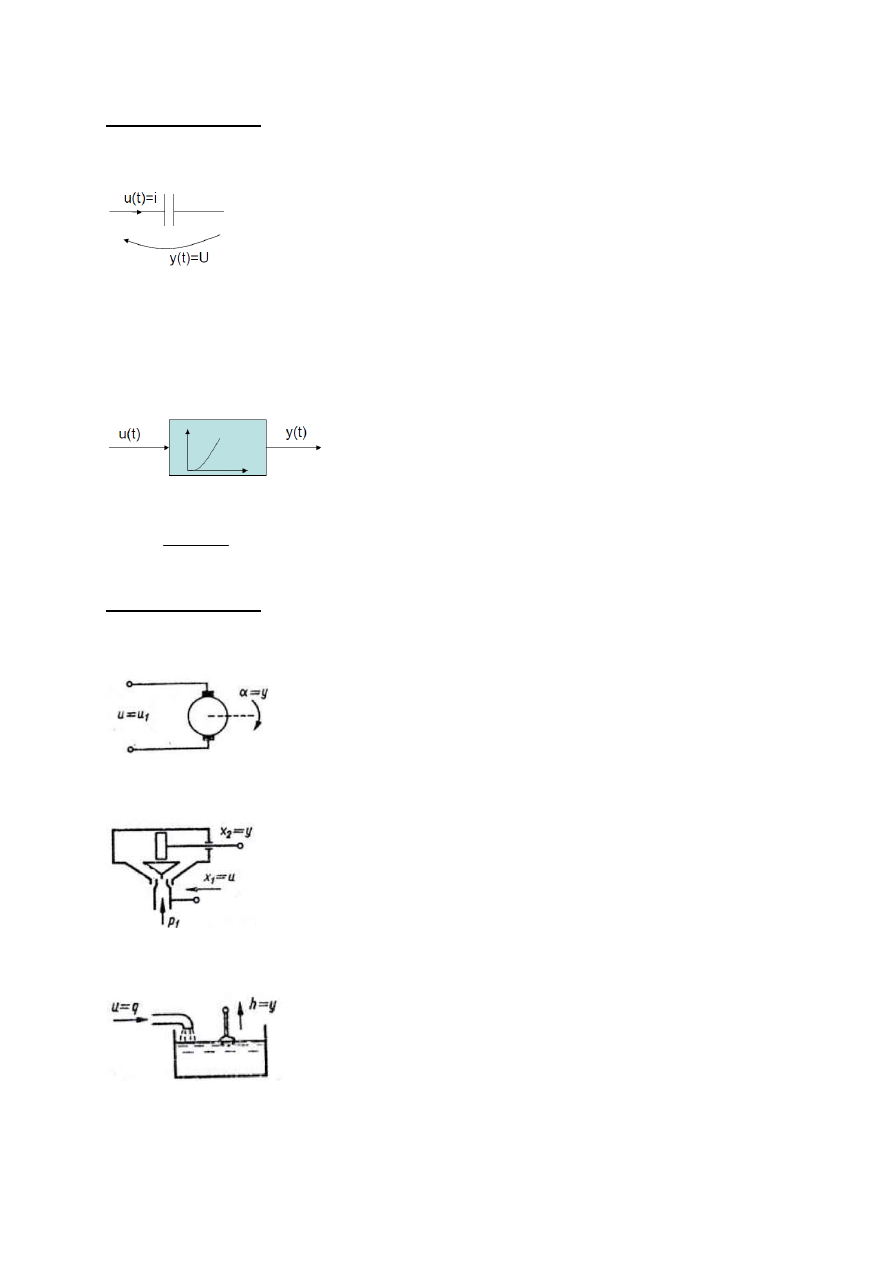
4. Człon całkujący idealny
Odpowiedź skokowa
s
k
s
K
=
)
(
(transmitancja)
3
Przykłady realizacji
- idealny kondensator (natężenie prądu elektrycznego – napięcie elektryczne)
- licznik odległości
)
(t
u
- prędkość kątowa koła
)
(t
y
- przebyta droga
5. Człon całkujący rzeczywisty
Odpowiedź skokowa
)
(
)
(
sT
s
k
s
K
+
1
=
(transmitancja)
Przykłady realizacji
- silnik elektryczny prądu stałego (napięcie elektryczne – kąt obrotu)
- siłownik pneumatyczny (przesunięcie – przesunięcie)
- zbiornik (dopływ - poziom)
4
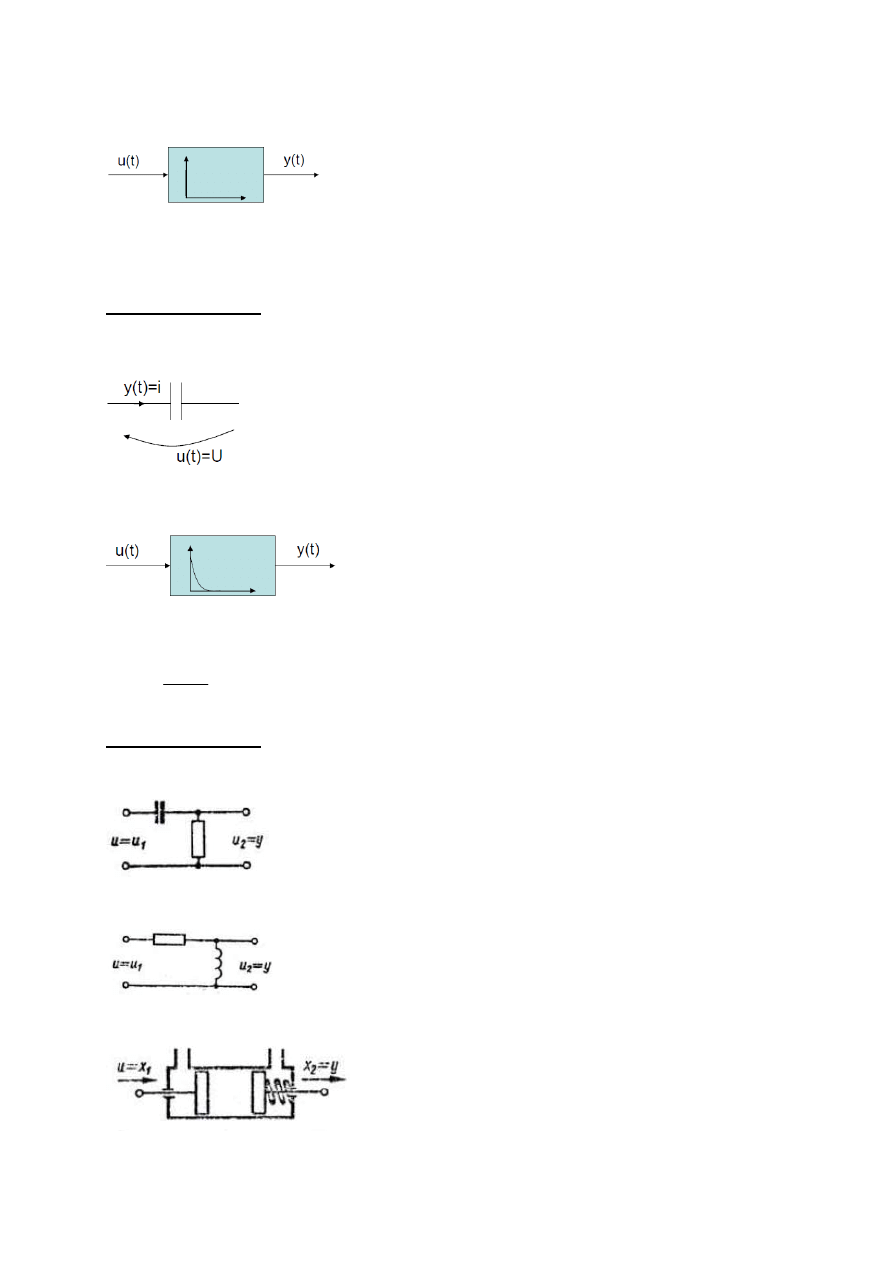
5. Człon różniczkujący idealny
Odpowiedź skokowa
ks
s
K
=
)
(
(transmitancja)
Przykłady realizacji
- idealny kondensator (natężenie prądu elektrycznego – napięcie elektryczne)
6. Człon różniczkujący rzeczywisty
Odpowiedź skokowa
sT
ks
s
K
+
1
=
)
(
(transmitancja)
Przykłady realizacji
- układ CR (napięcie elektryczne – napięcie elektryczne)
- układ LR (napięcie elektryczne – napięcie elektryczne)
- układ pneumatyczny (przesunięcie – przesunięcie)
5
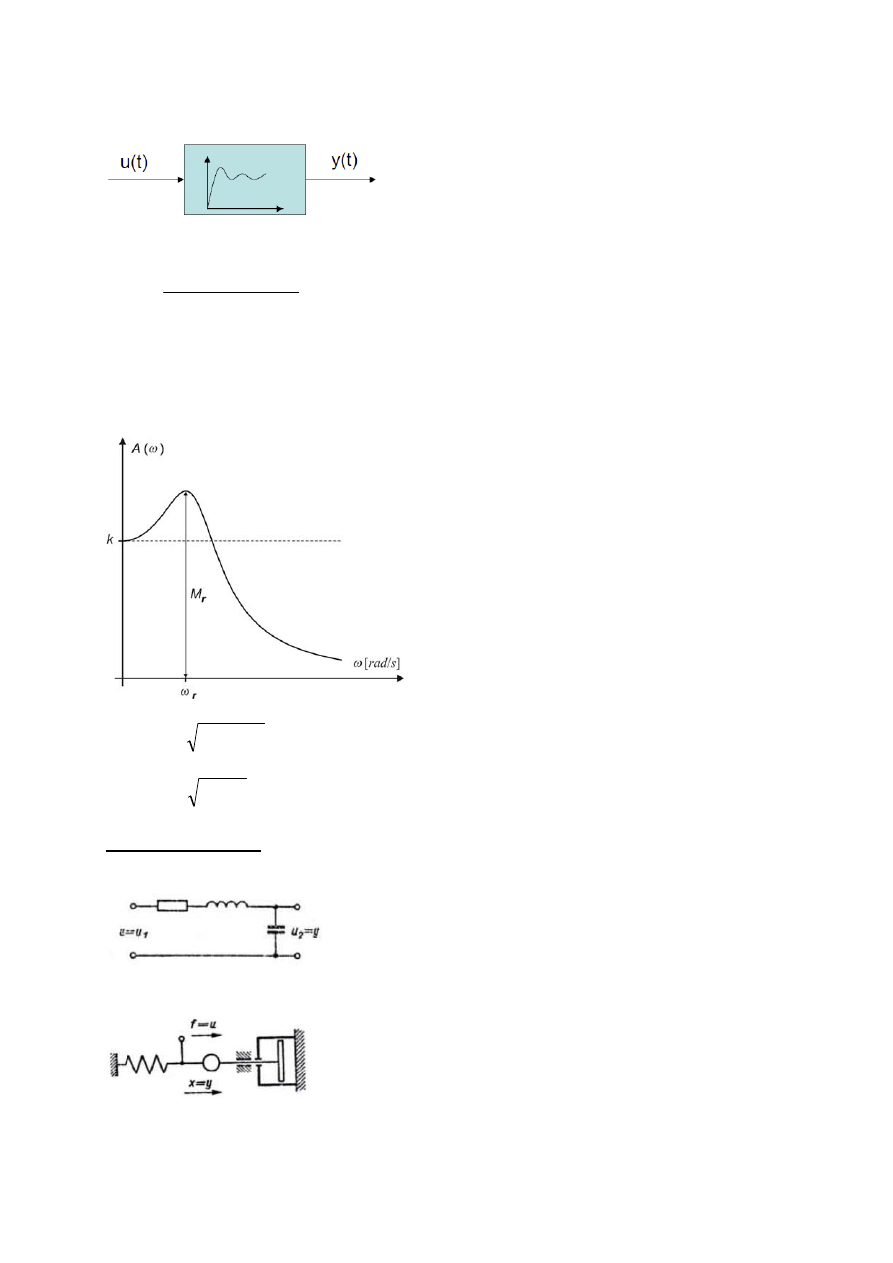
7. Człon oscylacyjny
Odpowiedź skokowa
2
0
0
2
2
0
+
2
+
=
ω
βω
ω
s
s
k
s
K
)
(
(transmitancja)
k - współczynnik wzmocnienia statycznego
0
ω
- pulsacja drgań własnych nietłumionych
β
- współczynnik tłumienia
2
0
⋅
2
−
1
⋅
=
β
ω
ω
r
- pulsacja rezonansowa
2
0
−
1
⋅
=
β
ω
ω
n
- pulsacja drgań własnych tłumionych
Przykłady realizacji
- układ RLC (napięcie elektryczne – napięcie elektryczne)
- układ mechaniczny (siła przesunięcie)
6
7. Człon opóźniający
Odpowiedź skokowa
0
⋅
−
⋅
=
T
s
e
k
s
K
)
(
(transmitancja)
e - podstawa logarytmu naturalnego
0
T - czas opóźnienia
Przykłady realizacji
- układ elektryczny (napięcie elektryczne - napięcie elektryczne)
- układ mechaniczny (wydajność)
Wyszukiwarka
Podobne podstrony:
czlony dynamiczne id 128806 Nieznany
czlony dynamiczne id 128806 Nieznany
Projekt podstawowe człony dynamiczne
Podstawy programowania 1 W2 id Nieznany
podstawy zarzadzania wyklady id Nieznany
3 Podstawy obl inzynierskich id Nieznany (2)
cw7 podstawowe człony dynamiczne
syposz,podstawy automatyki, PODSTAWOWE CZŁONY DYNAMICZNE
Podstawowe człony dynamiczne
podstawy makroekonomii 14str id Nieznany
podstawy programowania java id Nieznany
Podstawy pielegniarstwa cz3 id Nieznany
Podstawowe czlony automatyki sp Nieznany
Podstawowe człony dynamiczne
Podstawy dydaktyki ogolnej id 3 Nieznany
więcej podobnych podstron