
1
Przedmiot:
Mechanika
Formy zajęć: wykład - 30 godz./sem.
ćwiczenia - 15 godz./sem.
Prowadzący: dr inż. Radosław Machlarz, p. 110
mgr inż. Wojciech Zieliński, p. 113
Warunki zaliczenia:
wykład: egzamin
ćwiczenia: kolokwium pisemne

2
Literatura
1. Kozak B.: Mechanika techniczna, WSiP
2. Leyko J.:
Mechanika ogólna, PWN
3.
Niezgodziński T.: Mechanika ogólna, PWN
4. Misiak J.:
Zadania z mechaniki ogólnej, WNT
5. Ostwald M.:
Podstawy wytrzymałości materiałów,
Wydawnictwo Politechniki Poznańskiej
6. Ostwald M.:
Wytrzymałość materiałów. Zbiór zadań,
Wydawnictwo Politechniki Poznańskiej
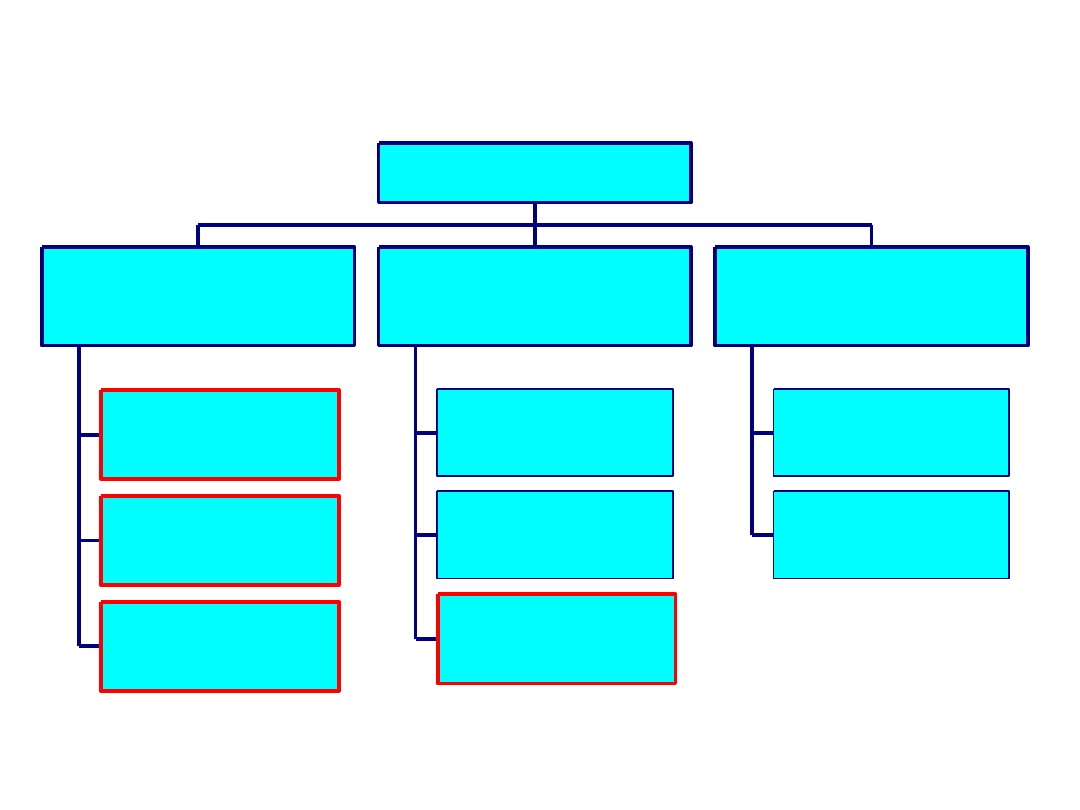
3
statyka
kinematyka
dynamika
mechanika
ogólna
teoria
sprężystości
teoria
plastyczności
wytrzymałość
materiałów
mechanika
ciał odkształcalnych
hydromechanika
aeromechanika
mechanika
płynów
Mechanika
Działy mechaniki
4
Podstawowe pojęcia mechaniki
Uproszczone modele ciał rzeczywistych:
•
Punkt materialny
– punkt geometryczny obdarzony masą,
•
Układ punktów materialnych – zbiór punktów materialnych
zachowujących odległości,
•
Ciało doskonale sztywne – ciało nie podlegające
odkształceniom pod wpływem działania sił.
5
Podstawowe prawa mechaniki
–
prawa Newtona
sformułowane w 1687r., odnoszące się do punktu materialnego
6
7
8
Jednostki siły i masy
Masa a ciężar ciała
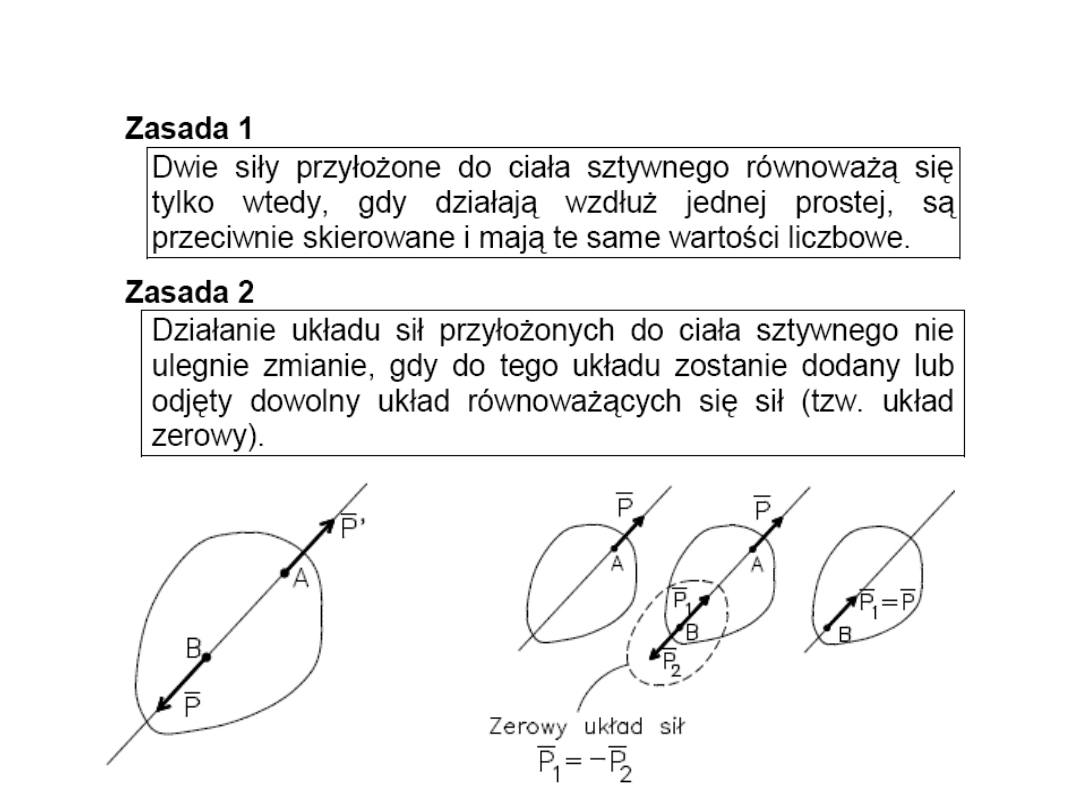
9
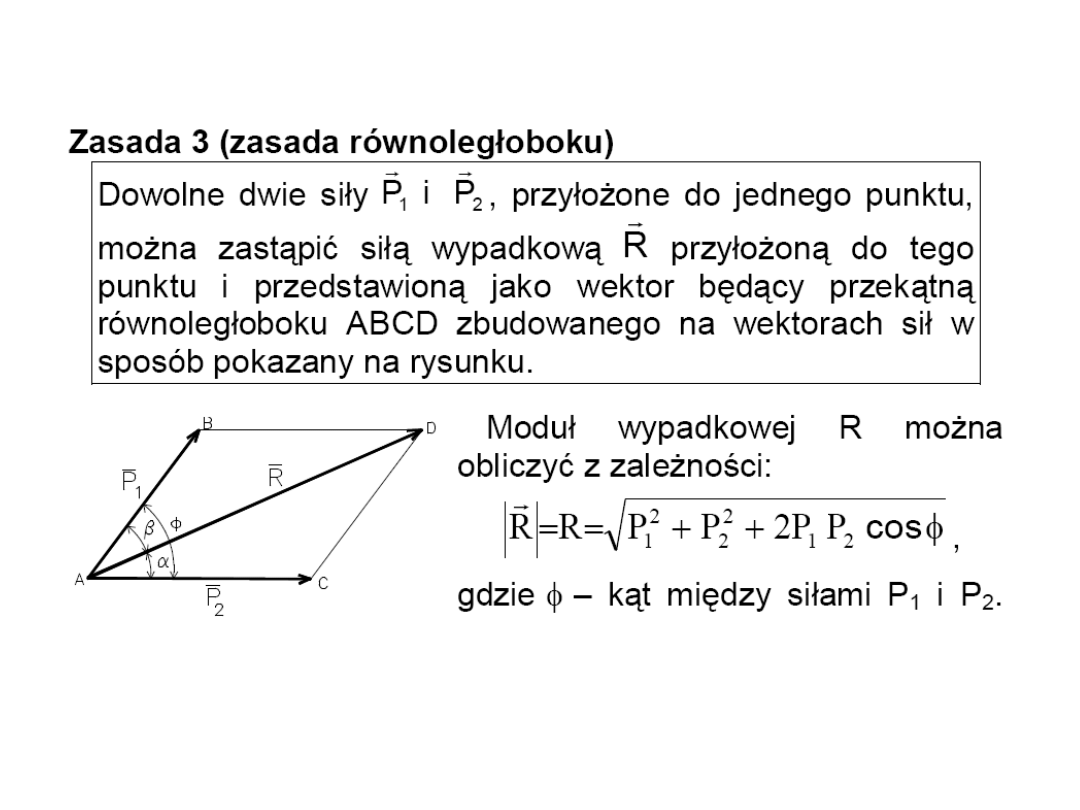
Zasady statyki
10
11
12
Ciało nieswobodne można rozpatrywać jako swobodne
podlegające działaniu sił czynnych oraz sił biernych –
reakcji więzów.
Więzy – ograniczenia ruchu nakładane przez inne ciała.
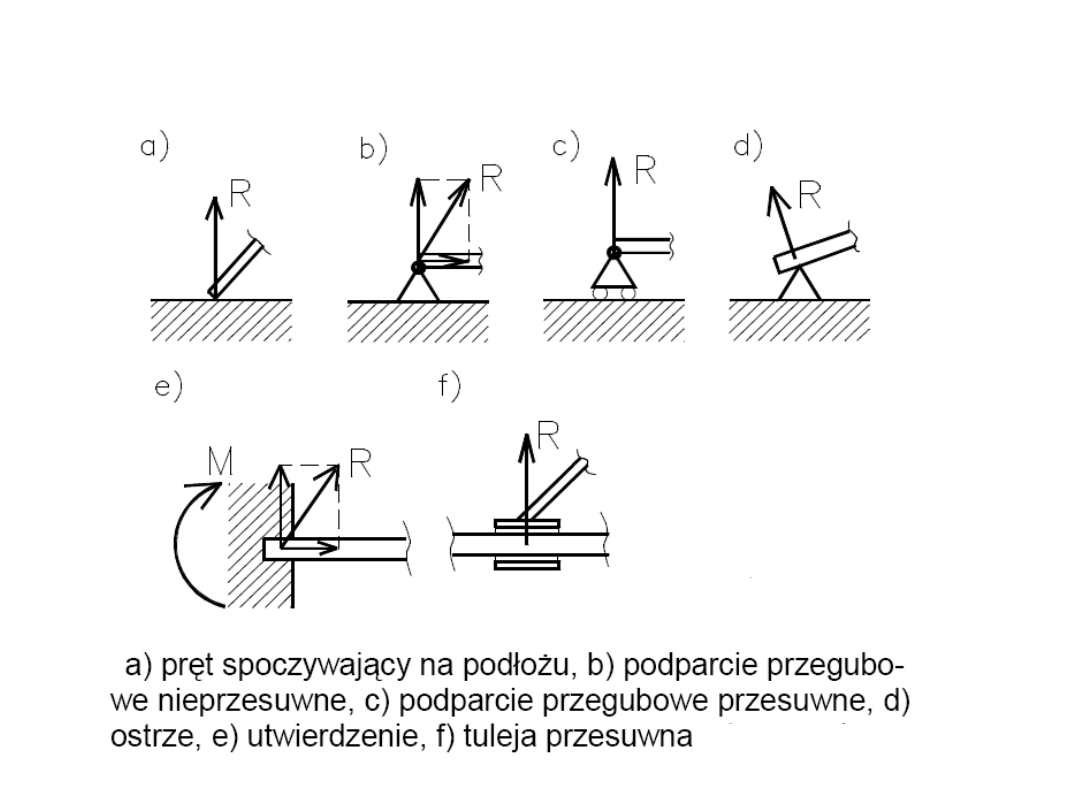
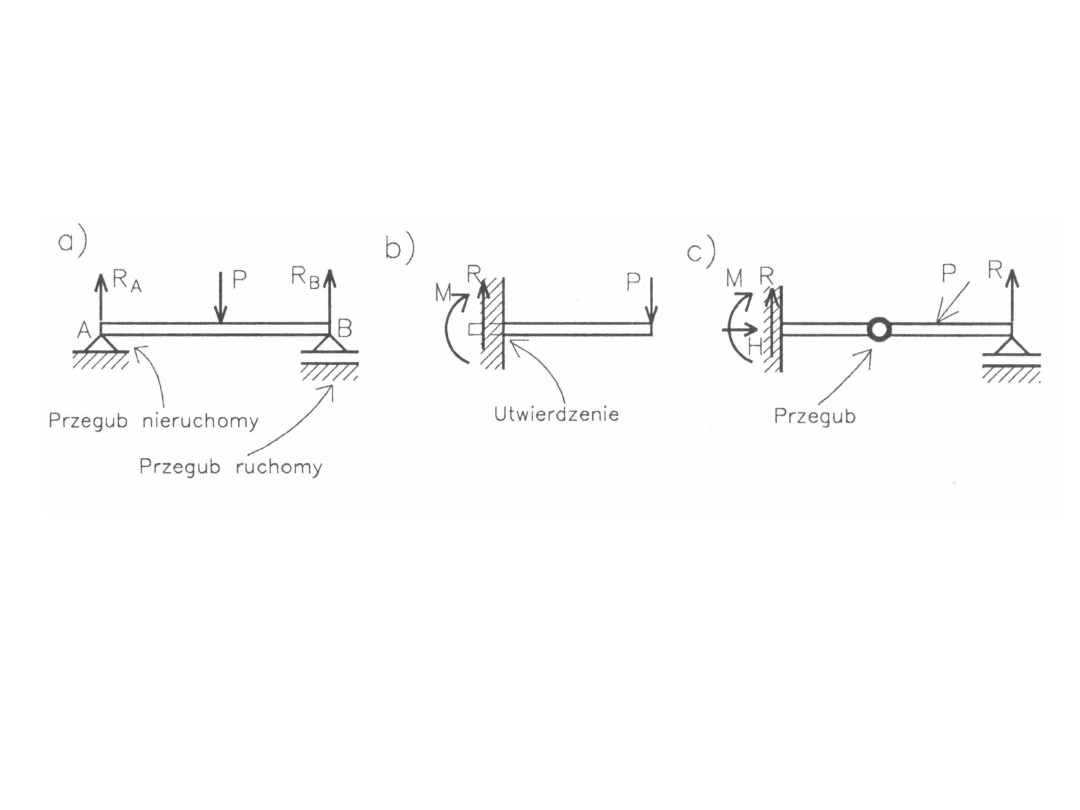
13
Przykłady więzów i ich reakcje
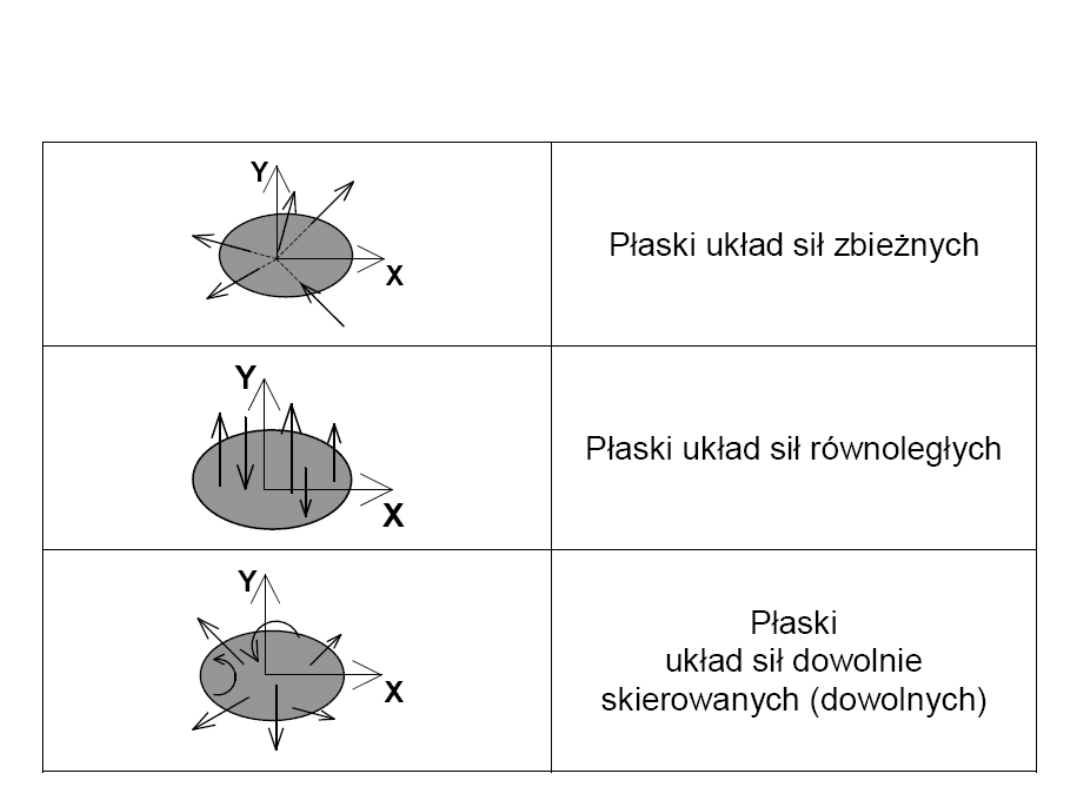
14
Płaskie układy sił
15
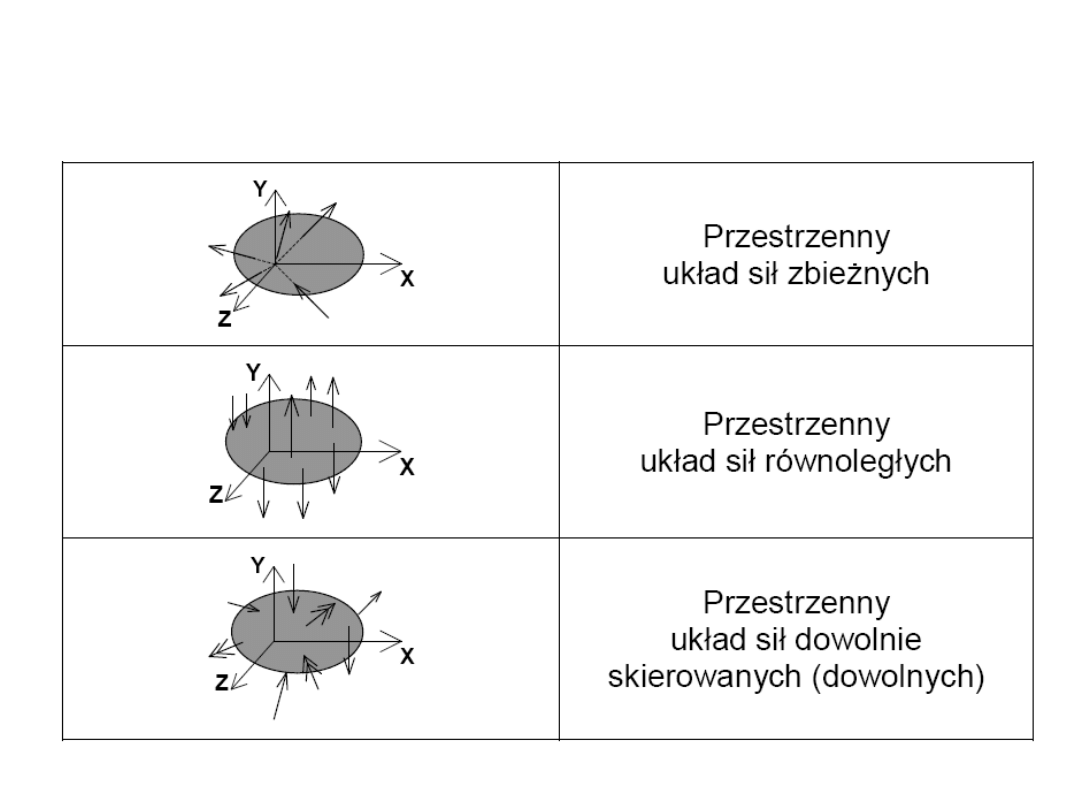
Przestrzenne układy sił
16
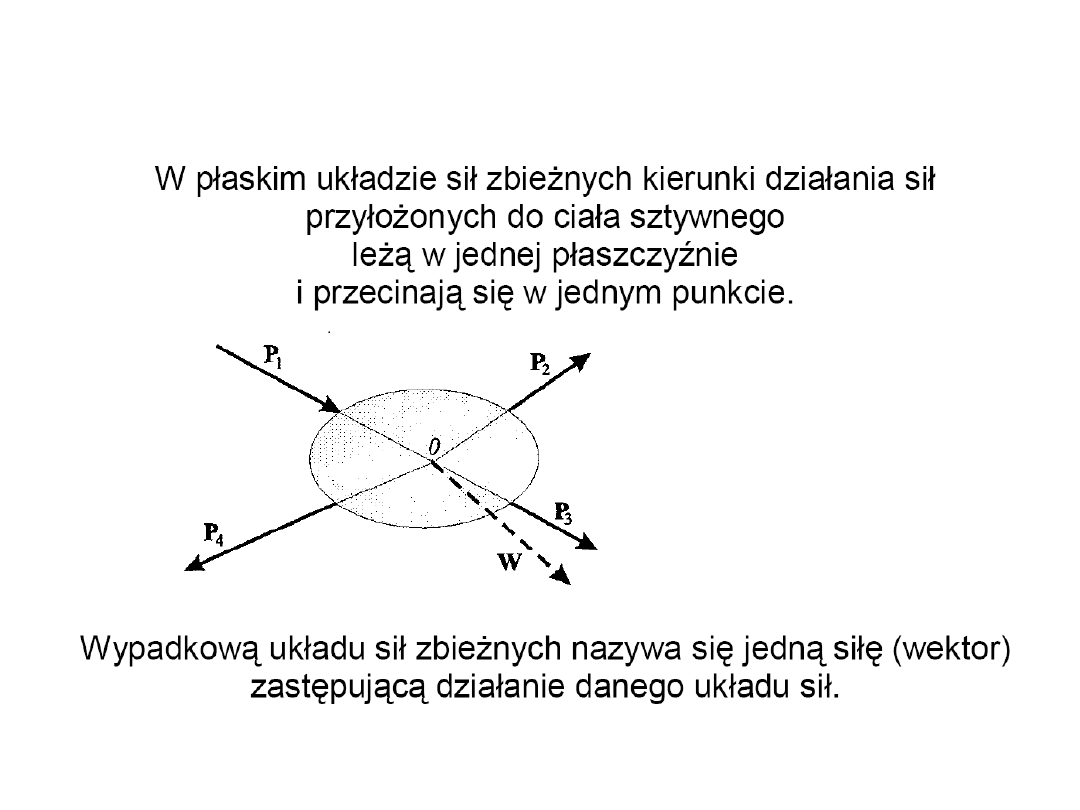
Płaski układ sił
zbieżnych
18
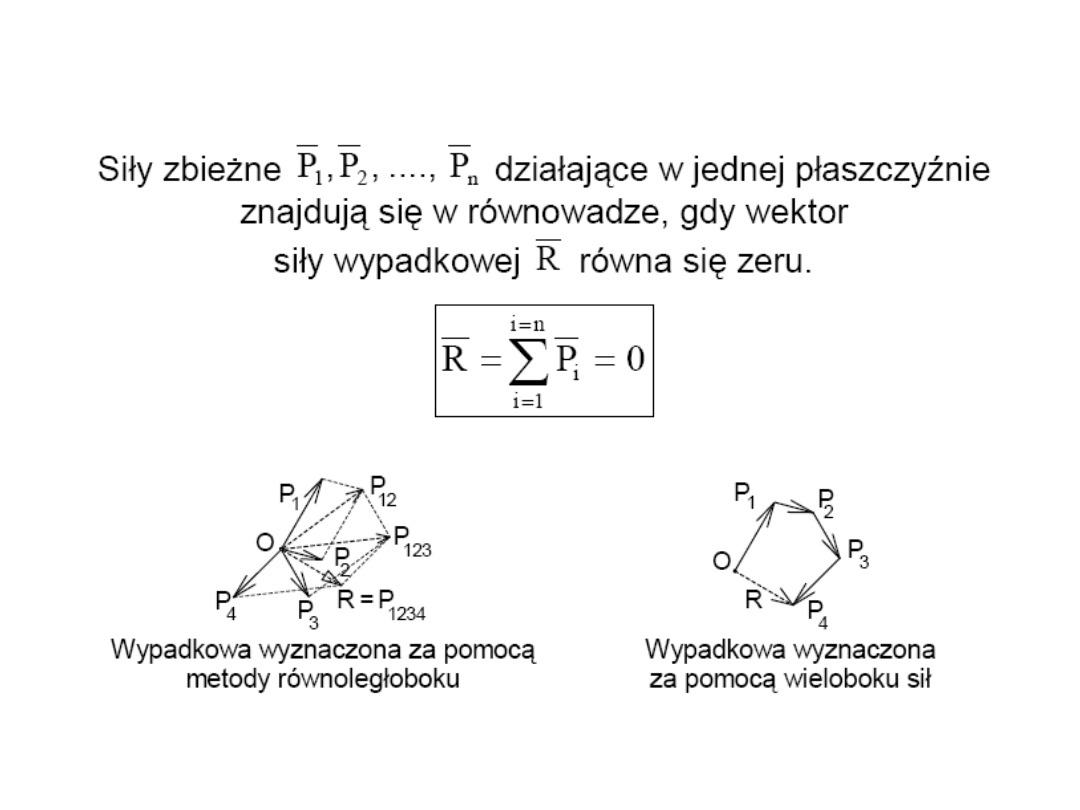
Warunek równowagi płaskiego zbieżnego układu sił
19
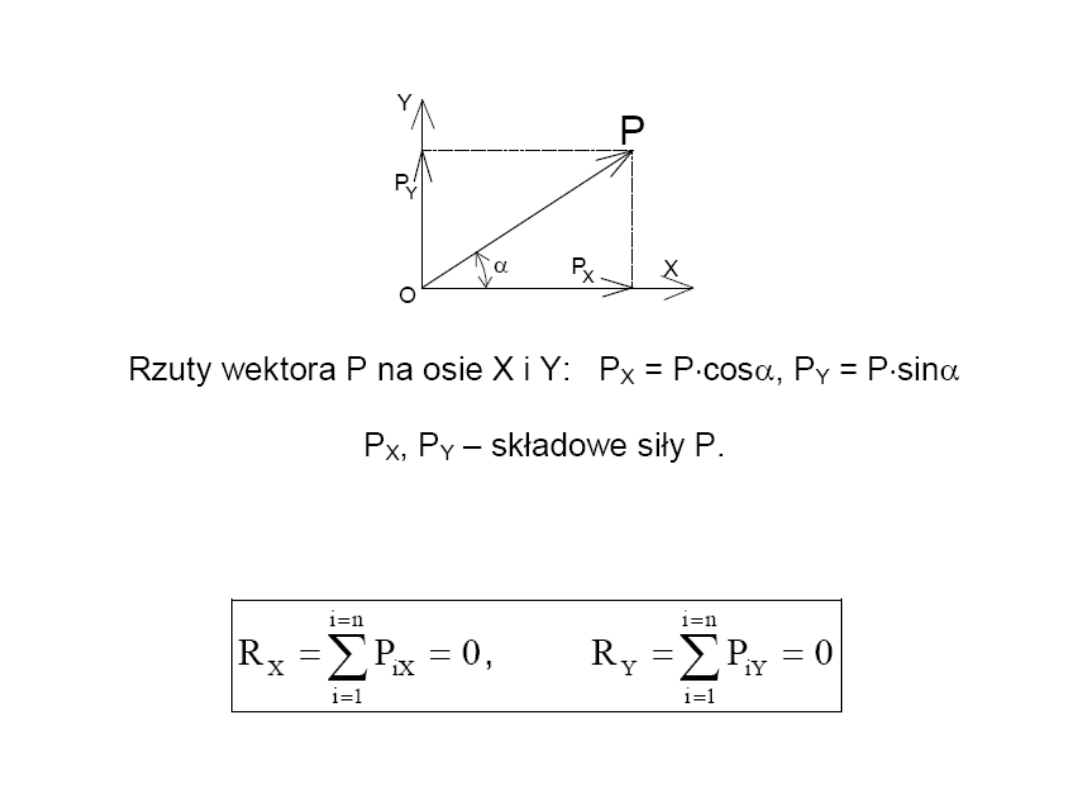
Analityczne wyznaczanie siły wypadkowej
Równania równowagi płaskiego układu sił zbieżnych
w zapisie analitycznym
20
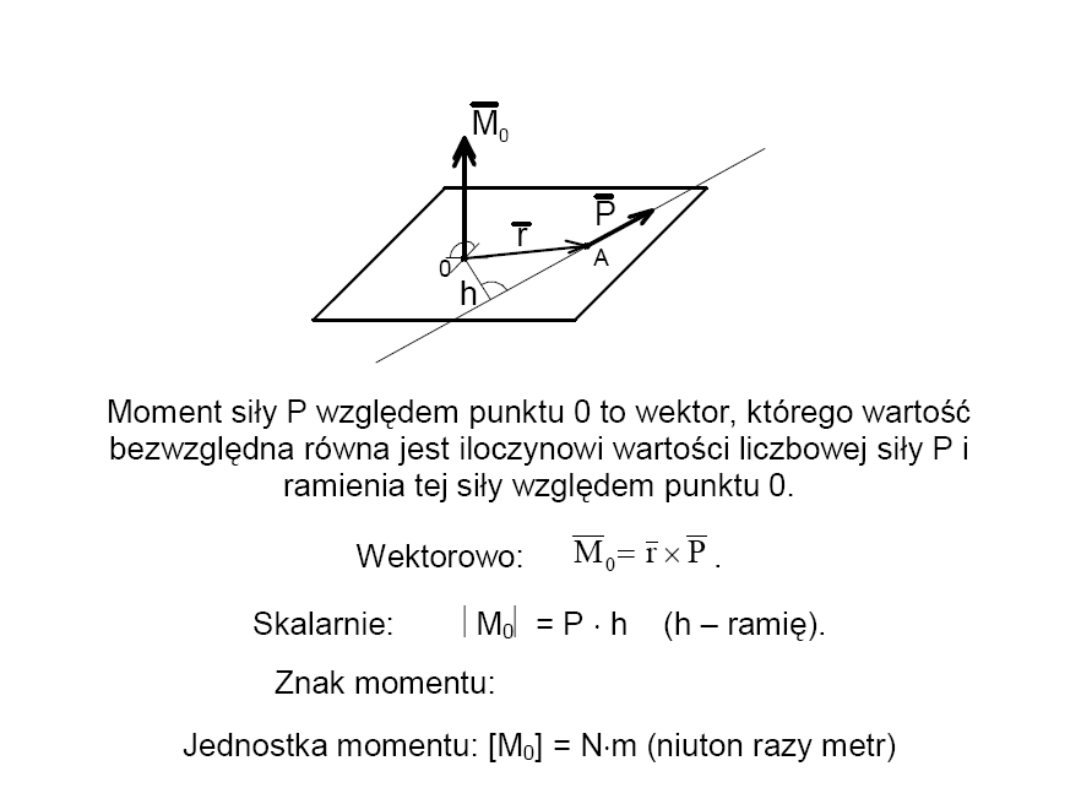
Moment siły względem punktu
reguła śruby prawoskrętnej
21
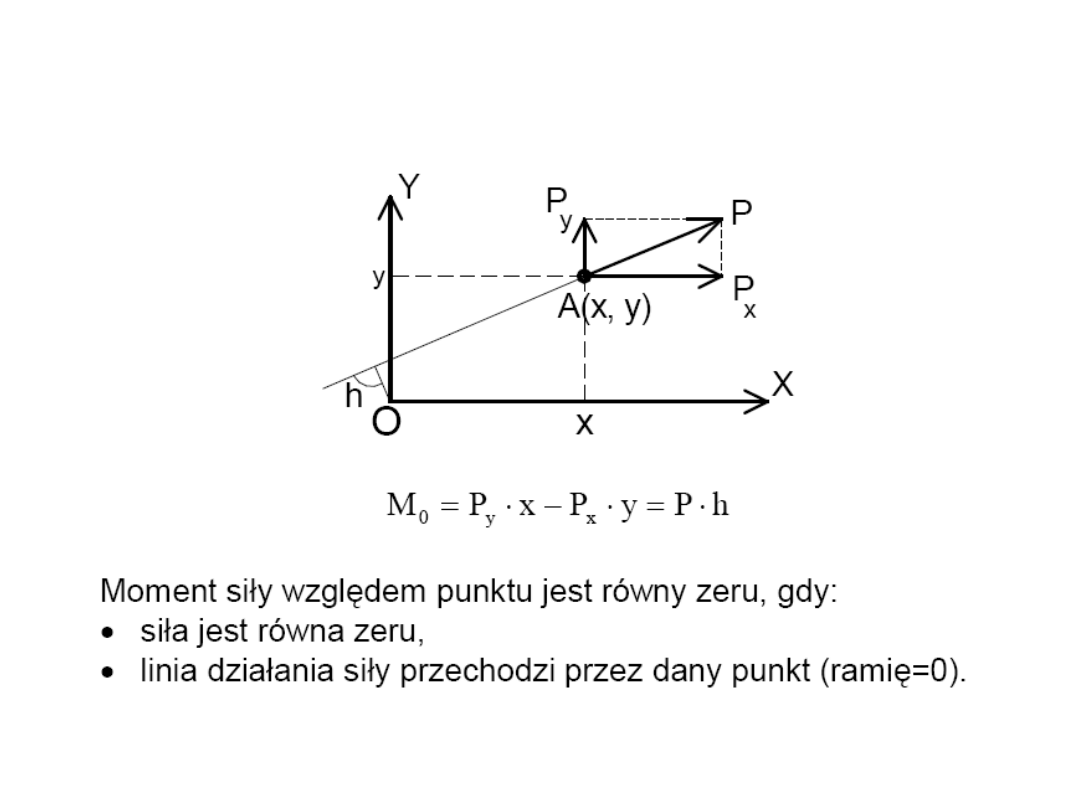
Analityczne wyznaczanie momentu
22
Płaskie układy sił równoległych
Płaski układ sił równoległych o tych samych zwrotach
23
Płaski układ sił równoległych o przeciwnych zwrotach
Płaskie układy sił równoległych
24
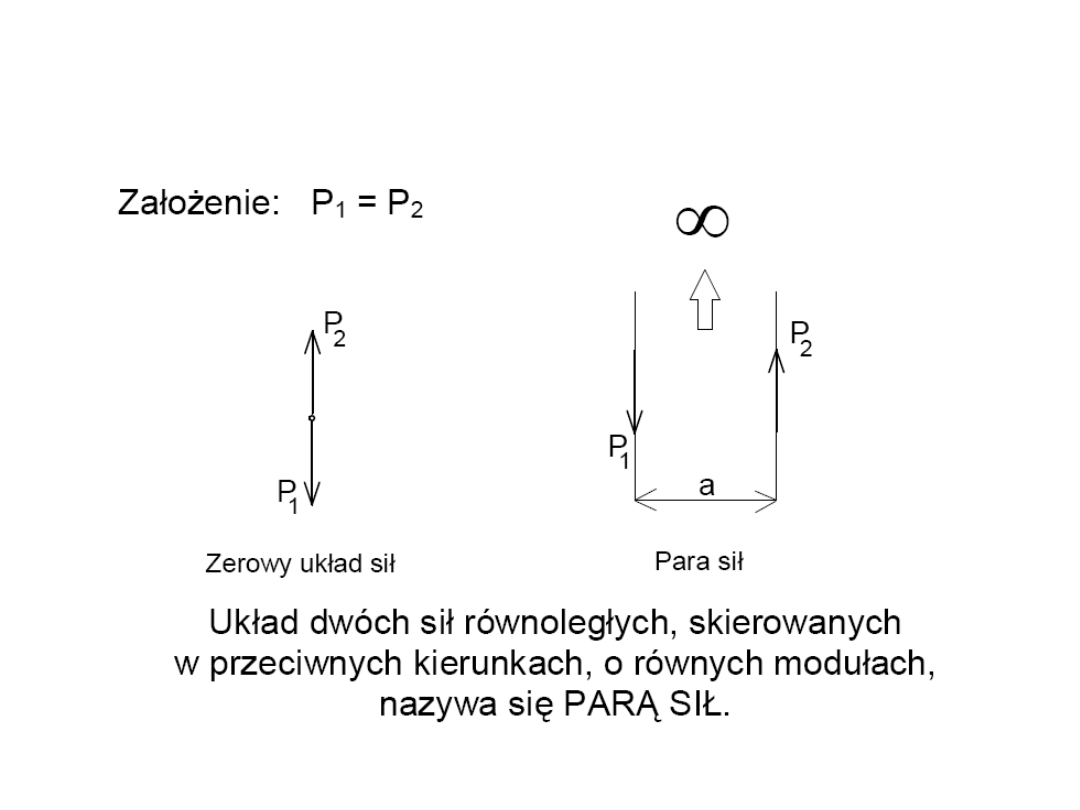
Para sił
25
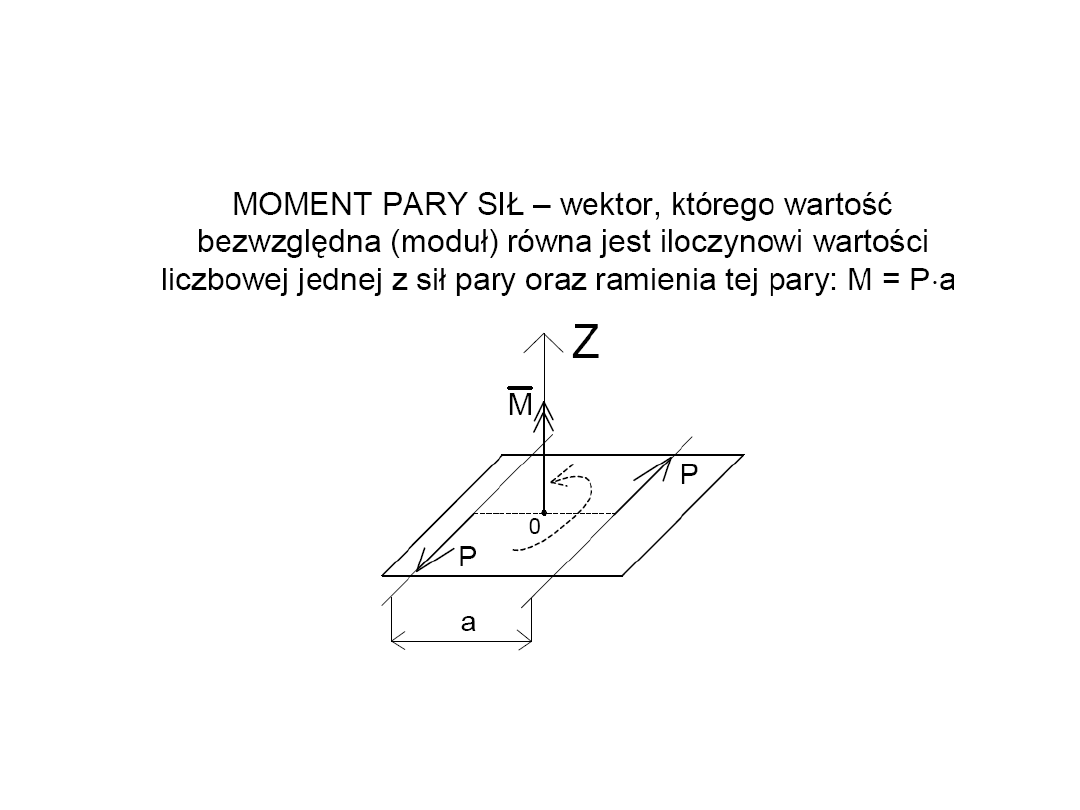
Moment pary sił
26
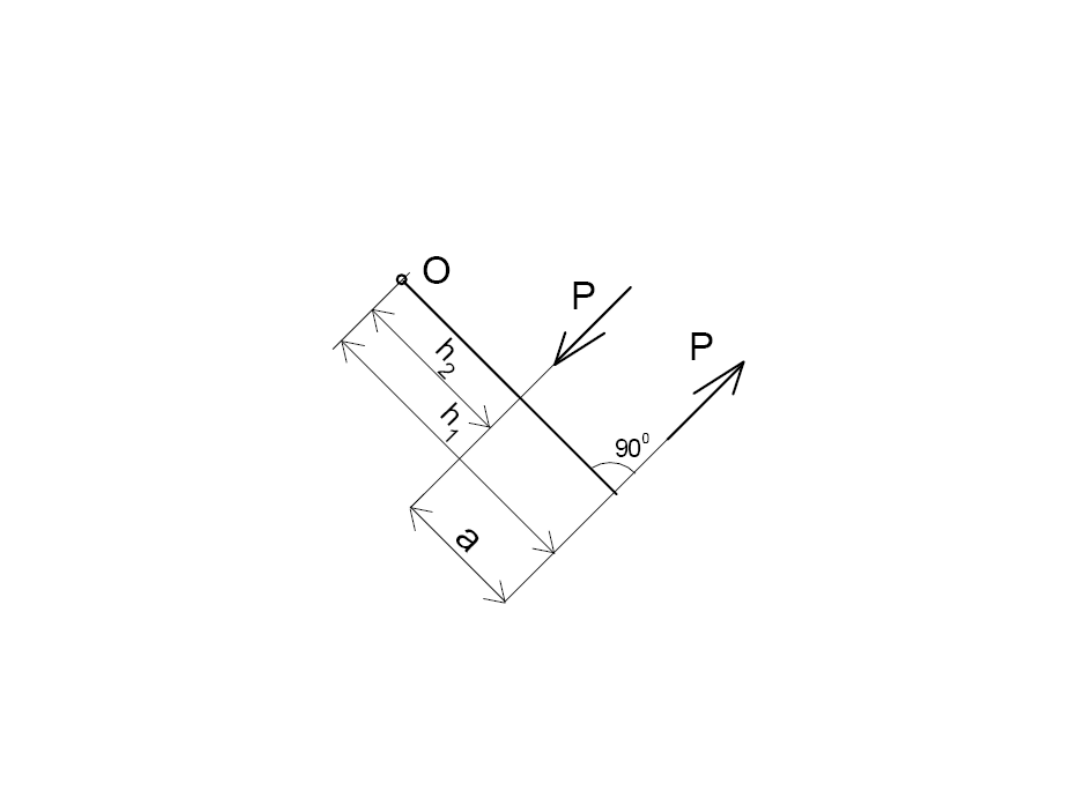
Moment sił tworzących parę
względem dowolnego punktu
Suma momentów sił tworzących parę względem
dowolnego punktu równa jest momentowi danej pary sił
27
Gdy na ciało sztywne działa n par sił leżących w jednej
płaszczyźnie, to pary te można zastąpić parą wypadkową o
momencie równym sumie momentów poszczególnych par:
n
i
i
M
M
1
0
1
n
i
i
M
Warunek równowagi par sił działających w jednej
płaszczyźnie
28
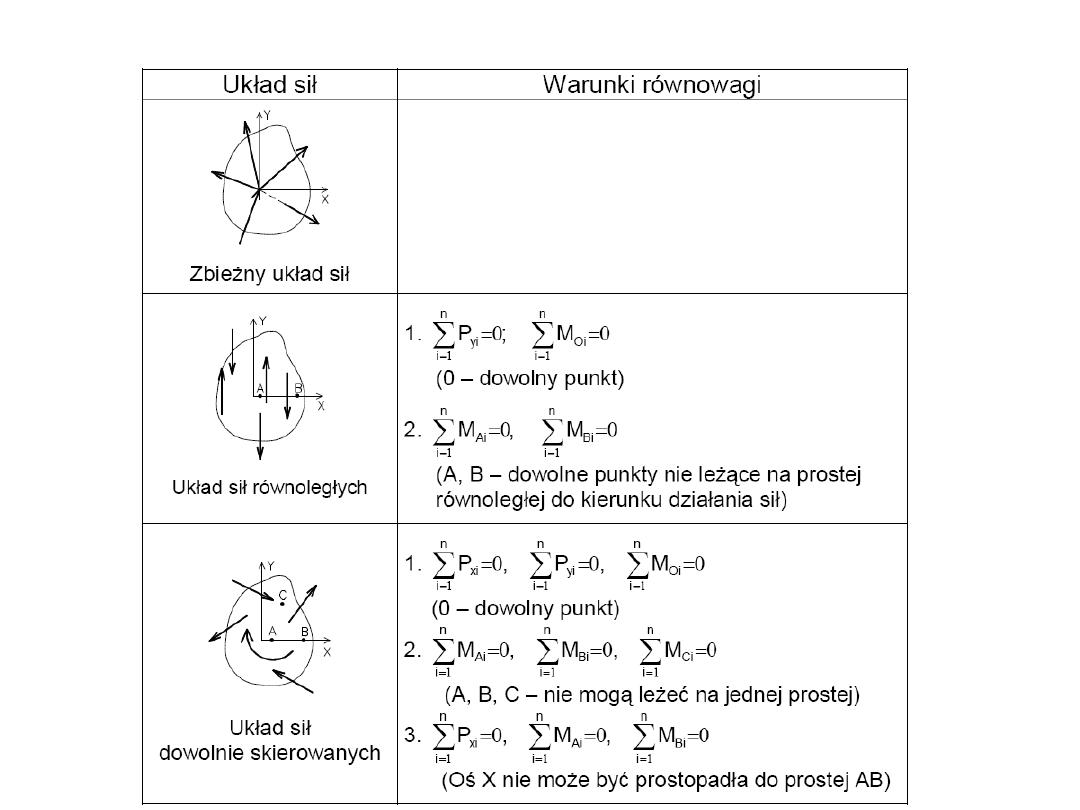
Warunki równowagi płaskich układów sił
n
i
yi
n
i
xi
P
P
1
1
0
0
29
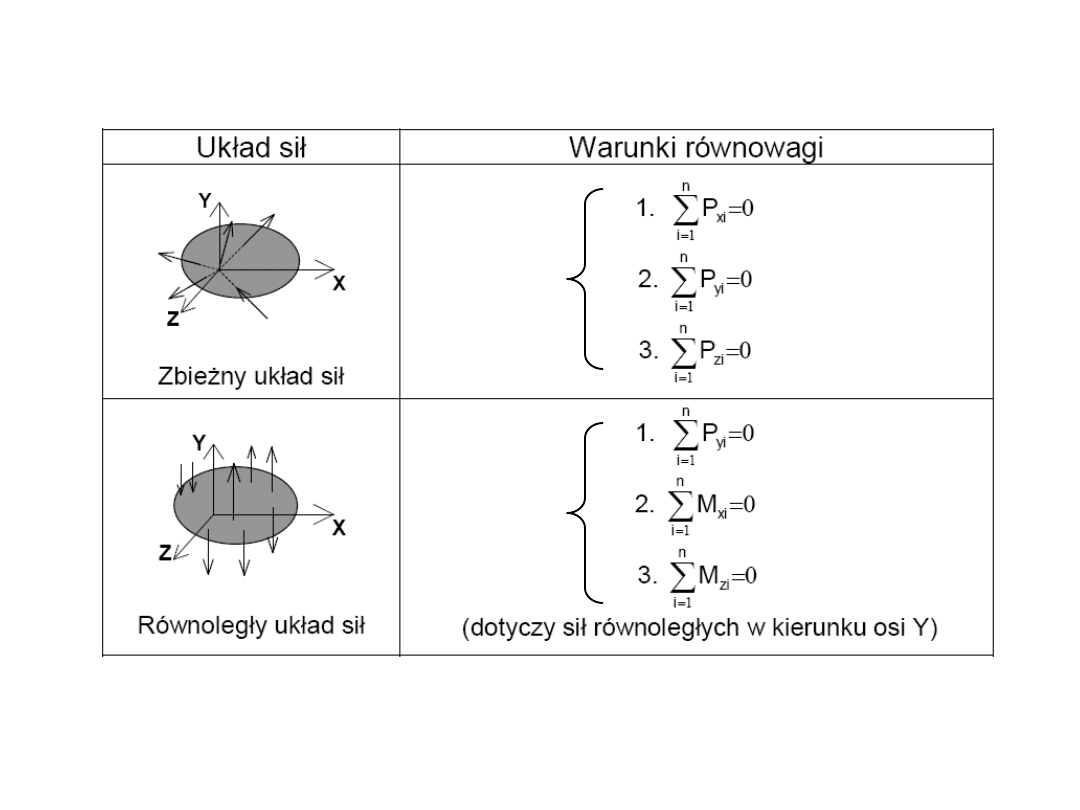
Warunki równowagi przestrzennych układów sił
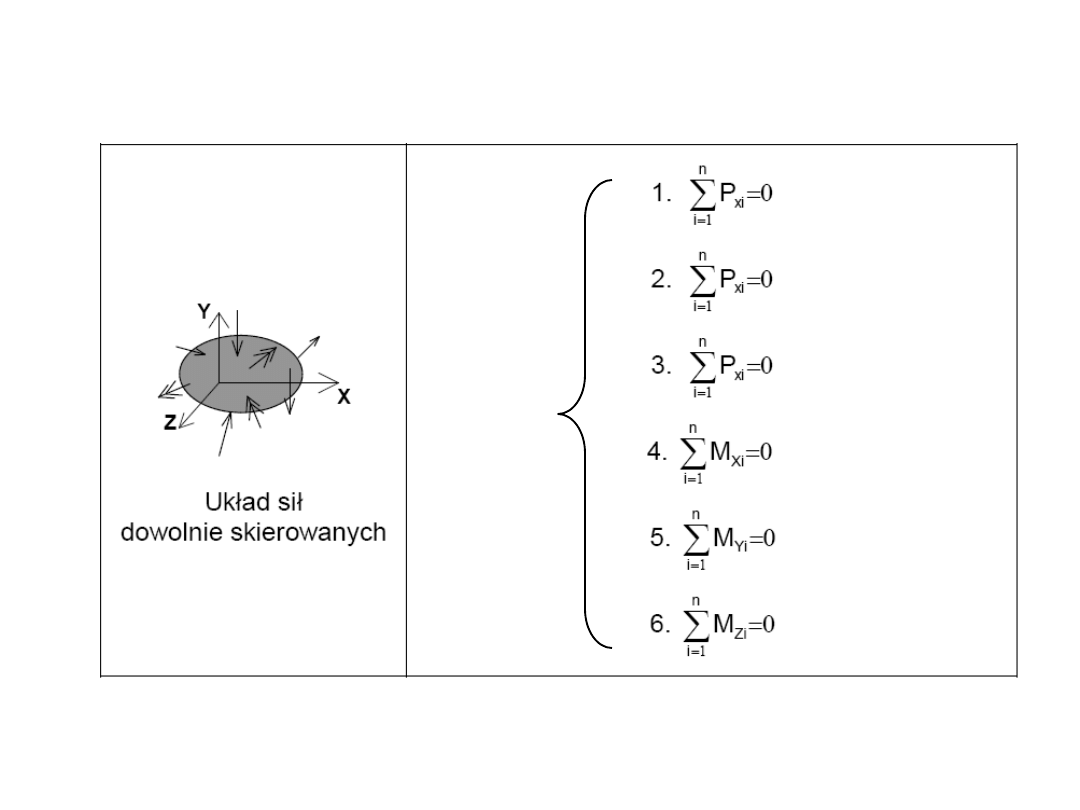
30
Warunki równowagi przestrzennych układów sił
31
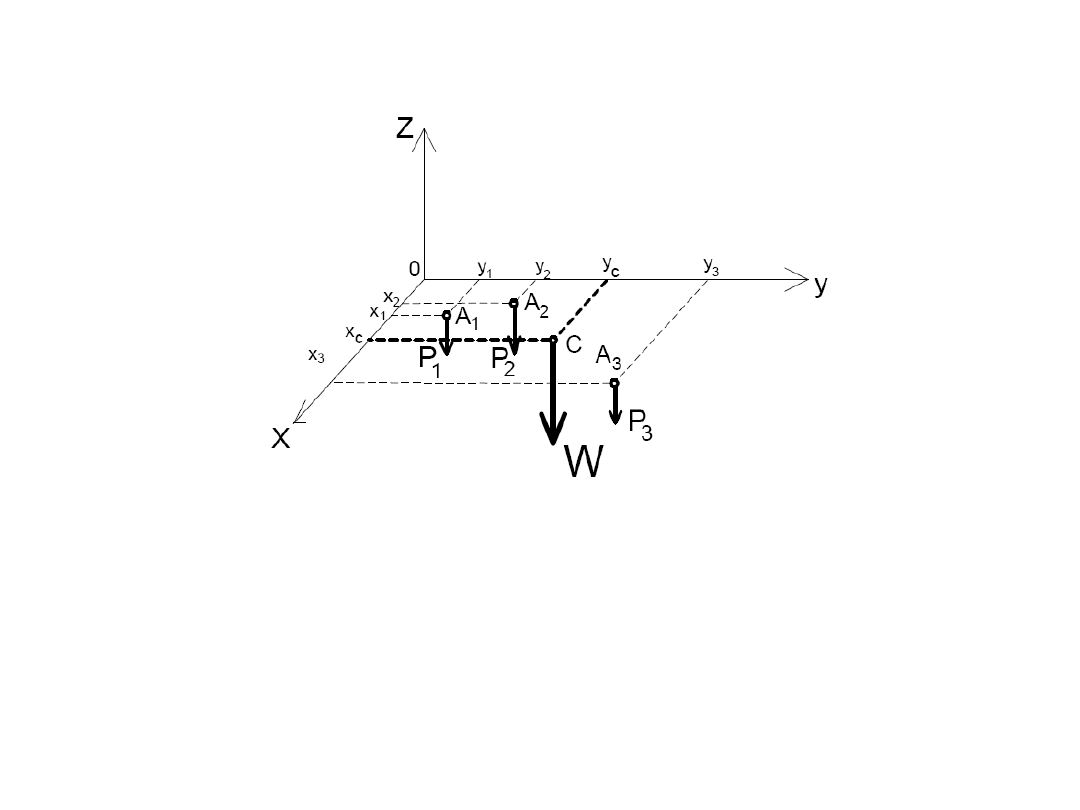
Środek przestrzennego układu sił równoległych
Siła wypadkowa W dowolnej liczby n sił równoległych do osi
z
, przyłożonych w punktach A
i
(x
i
,y
i
,0) wynosi:
n
i
i
P
W
1
32
Punkt przyłożenia siły W musi być taki, aby moment tej siły
względem danej osi był równy sumie momentów
poszczególnych sił składowych:
n
i
i
i
c
x
P
x
W
1
n
i
i
i
c
y
P
y
W
1
Współrzędne punktu przyłożenia siły W (środek sił
równoległych, środek ciężkości):
n
i
i
n
i
i
i
c
P
x
P
x
1
1
n
i
i
n
i
i
i
c
P
y
P
y
1
1
33
Środek ciężkości
34
Środek ciężkości bryły
Jeżeli:
dV
i
– objętość dostatecznie małego elementu bryły,
i
– ciężar właściwy danego elementu,
x
i
, y
i
, z
i
– współrzędne danego elementu,
to współrzędne środka ciężkości bryły:
n
i
i
n
i
i
i
c
dV
dV
x
x
1
1
n
i
i
n
i
i
i
c
dV
dV
y
y
1
1
n
i
i
n
i
i
i
c
dV
dV
z
z
1
1
Po przejściu do granicy:
G
xdV
x
V
c
G
ydV
y
V
c
G
zdV
z
V
c
V
dV
G
-
całkowity ciężar bryły.
35
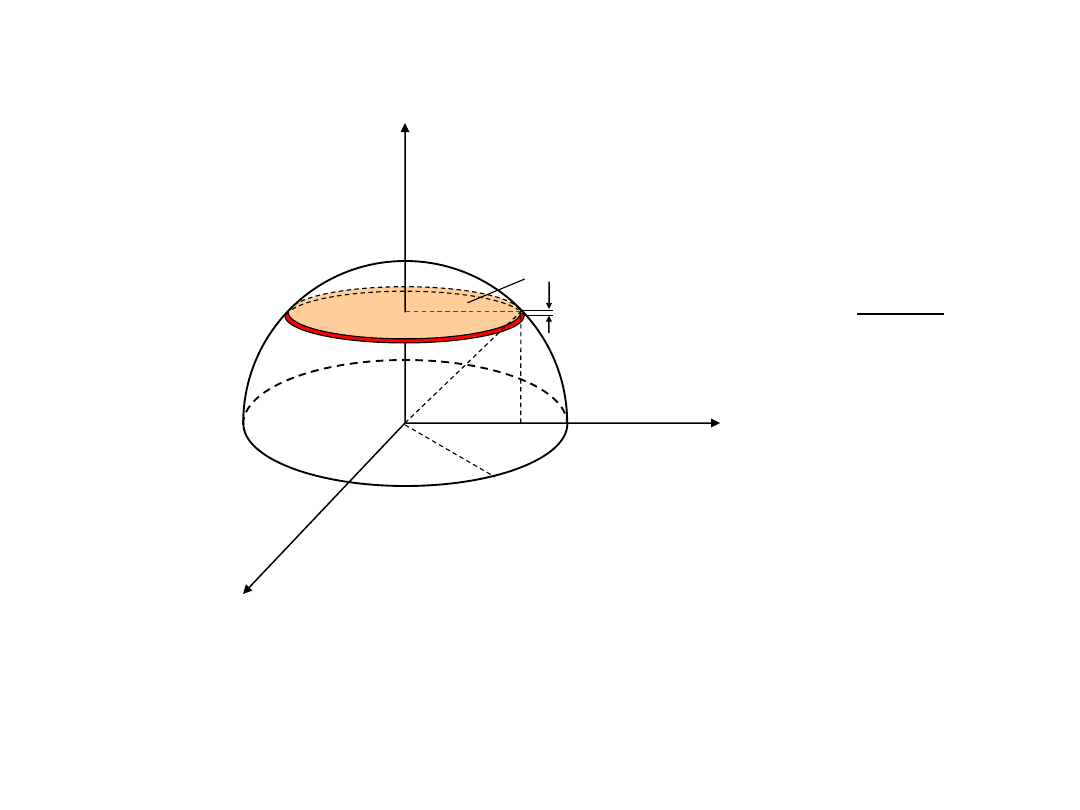
Przykład 1: Znaleźć położenie środka ciężkości jednorodnej półkuli o
promieniu r.
z
r
y
r
y
z
x
dz
dV
V
zdV
z
V
c
0
c
c
y
x
Przykład 2: Znaleźć położenie środka ciężkości połowy jednorodnej
powierzchni kulistej o promieniu r.

36
Środek ciężkości figury płaskiej
Jeżeli jednorodna figura płaska leży w płaszczyźnie x-y, to:
F
xdF
x
F
c
F
ydF
y
F
c
F
y
xdF
S
-
moment statyczny względem osi y,
F
x
ydF
S
-
moment statyczny względem osi x.
F
– pole powierzchni figury.
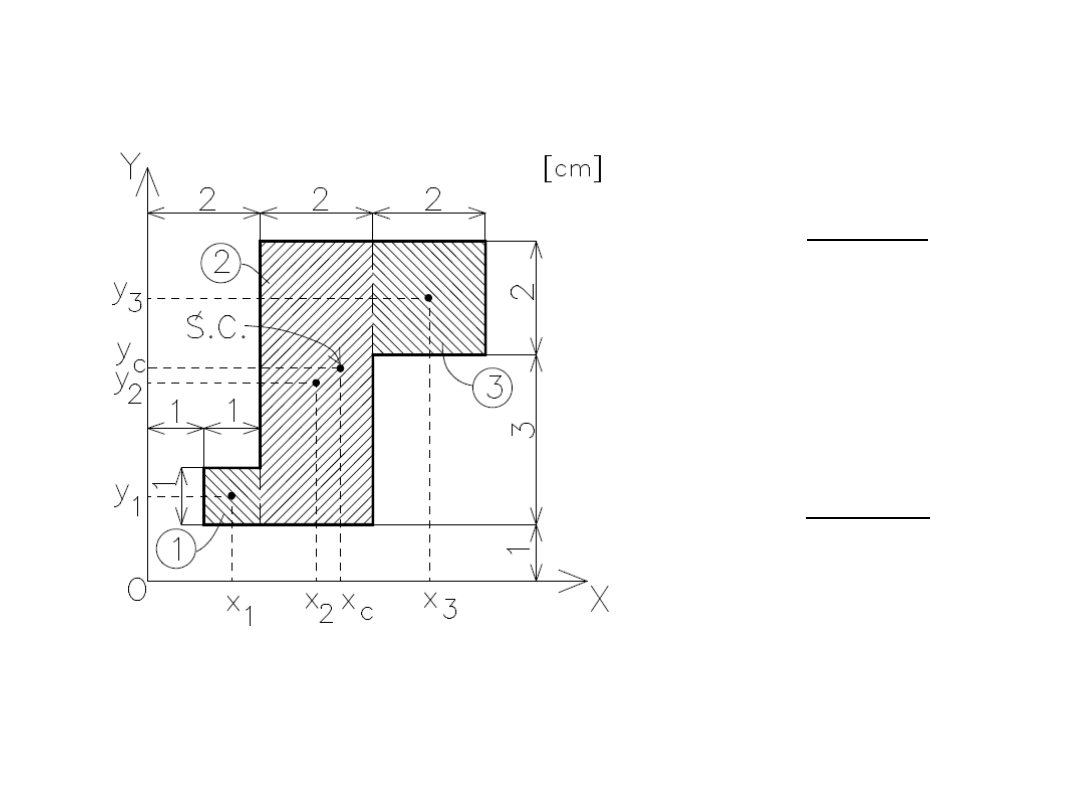
37
Przykład 3: Znaleźć środek ciężkości danej figury płaskiej.
3
1
3
1
i
i
i
i
i
c
F
F
x
x
3
1
3
1
i
i
i
i
i
c
F
F
y
y
38
Tarcie i prawa tarcia

39
Prawa tarcia Coulomba
N
T
N
T
1.
Siła tarcia jest niezależna od pola powierzchni
stykających się ze sobą ciał a zależy jedynie od ich
rodzaju, smarowania, wilgotności itp.
2.
Siła tarcia jest skierowana przeciwnie do kierunku
możliwego przesuwu ciała. Jej wartość zmienia się od 0
do T
max
. Wartość T
max
siła tarcia osiąga w chwili utraty
równowagi.
3.
Maksymalna siła tarcia jest proporcjonalna do reakcji
normalnej.
-
dla ciała pozostającego spoczynku
-
dla ciała ślizgającego się
40
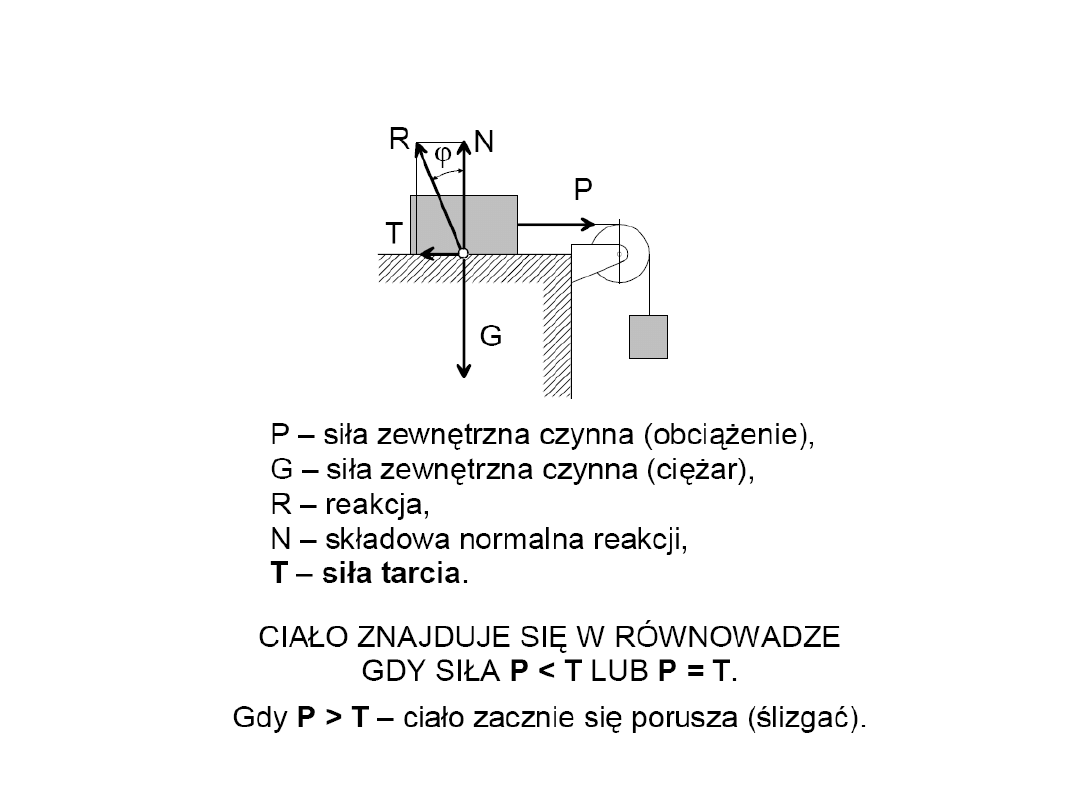
y
x
G
N
T
R
y
R
m
0
reakcja normalna równi
siła tarcia
wypadkowa siła reakcji
sin
G
P
x
cos
G
N
P
x
mg
G
siła nacisku
N
T
max
Siła tarcia na równi pochyłej
Przypadek graniczny: P
x
= T
max

41
Kinematyka
-
dział mechaniki zajmujący się ruchem ciał,
bez wnikania w związki między ruchem a siłami, które ten
ruch wywołały.
Ruch ciała
-
zjawisko zmiany w czasie położenia tego ciała
względem innego ciała, umownie przyjętego za nieruchome.
Układ odniesienia
-
układ współrzędnych sztywno
związany z ciałem odniesienia.
Czas
jest pojęciem pierwotnym, jest nieodwracalny,
niezależny od wyboru układu odniesienia, taki sam dla
wszystkich punktów układu.
Przestrzeń Euklidesa
-
trzy współrzędne prostokątne plus
czas
Kinematyka
42
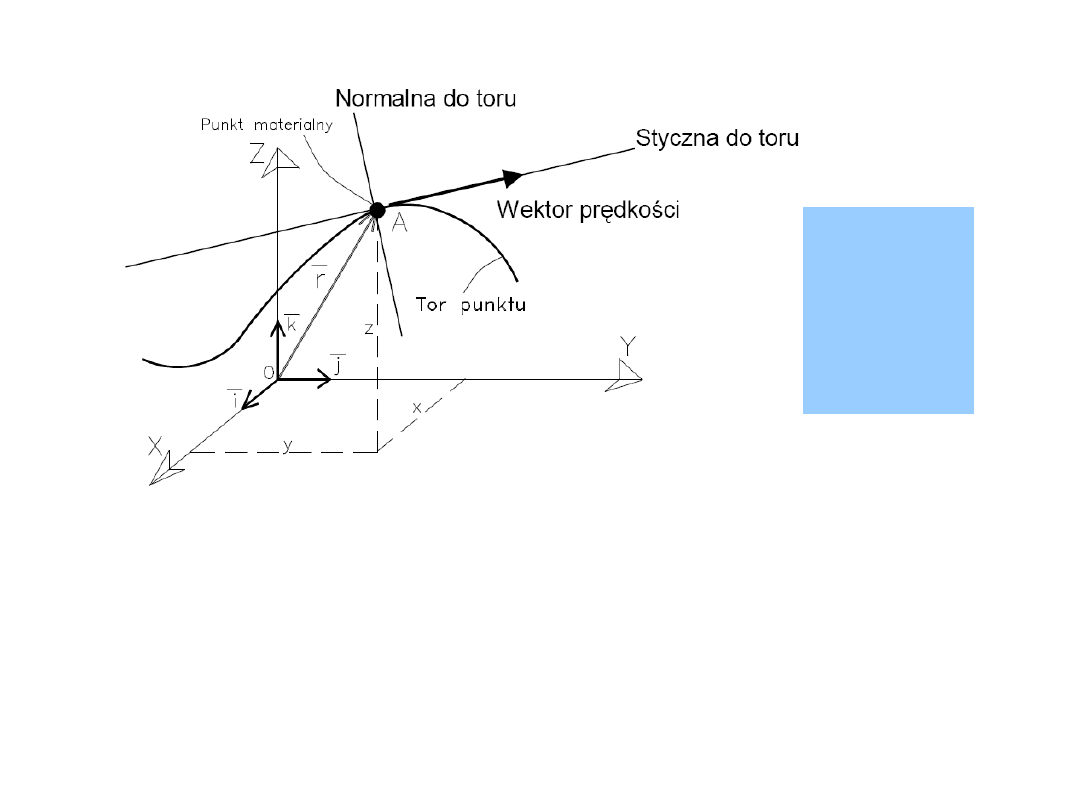
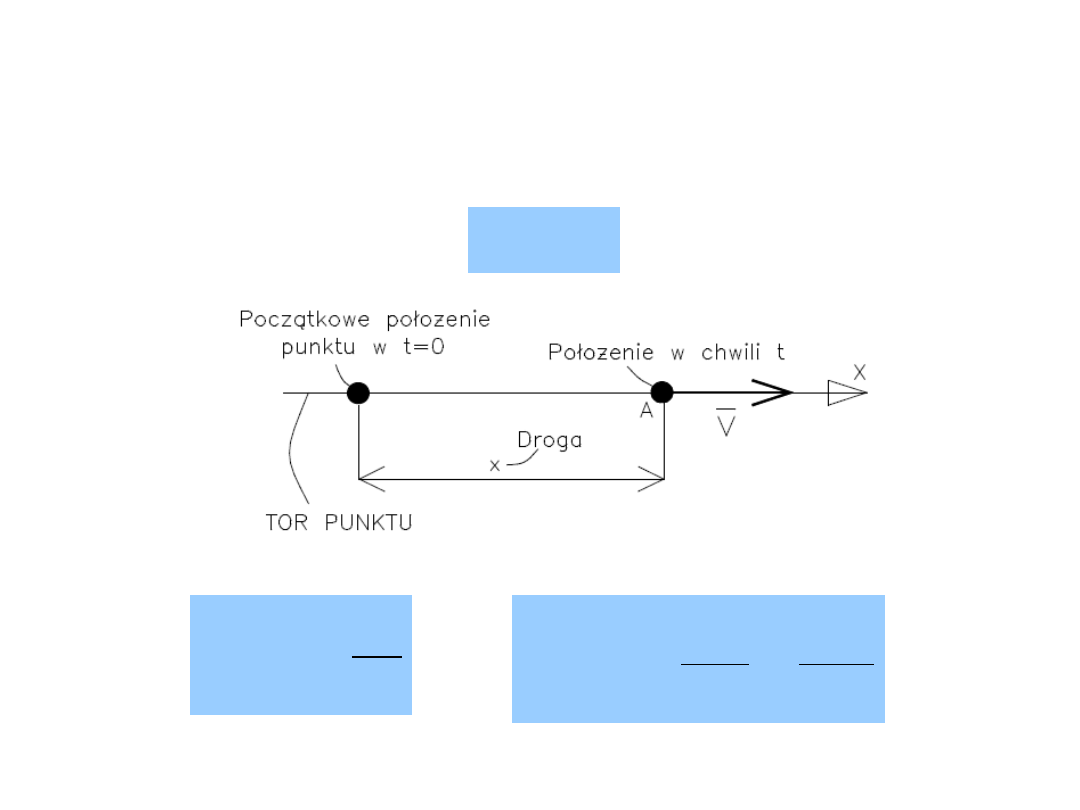
Tor ruchu (trajektoria)
-
miejsce geometryczne kolejnych położeń
ruchomego punktu w przestrzeni.
Promień wodzący
-
wektor o początku w początku układu
współrzędnych i końcu w rozpatrywanym punkcie.
Równanie trajektorii ruchu
-
równanie krzywej otrzymanej po
wyrugowaniu czasu z równań ruchu.
Równania ruchu punktu we współrzędnych prostokątnych
t
f
z
t
f
y
t
f
x
z
y
x
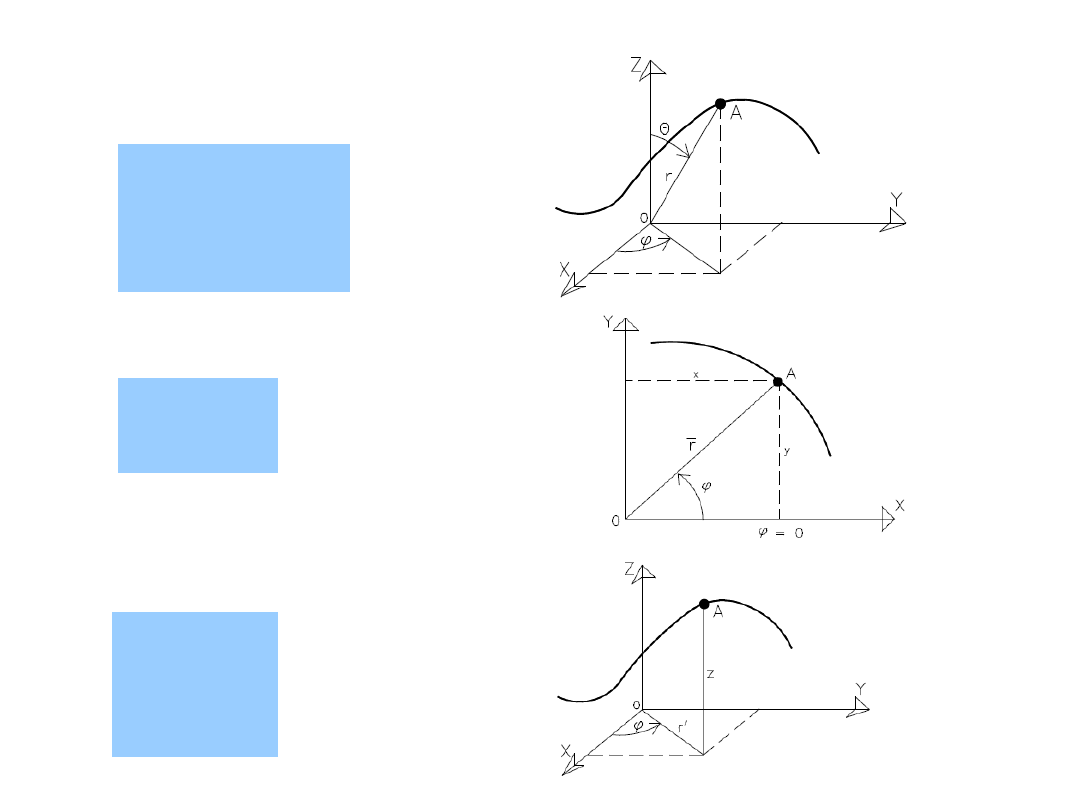
43
Inne układy współrzędnych:
biegunowy w przestrzeni (r,
,
):
walcowy (r,
,z):
sin
cos
r
y
r
x
biegunowy na płaszczyźnie (r,
):
cos
sin
sin
cos
sin
r
z
r
y
r
x
z
z
r
y
r
x
sin
cos
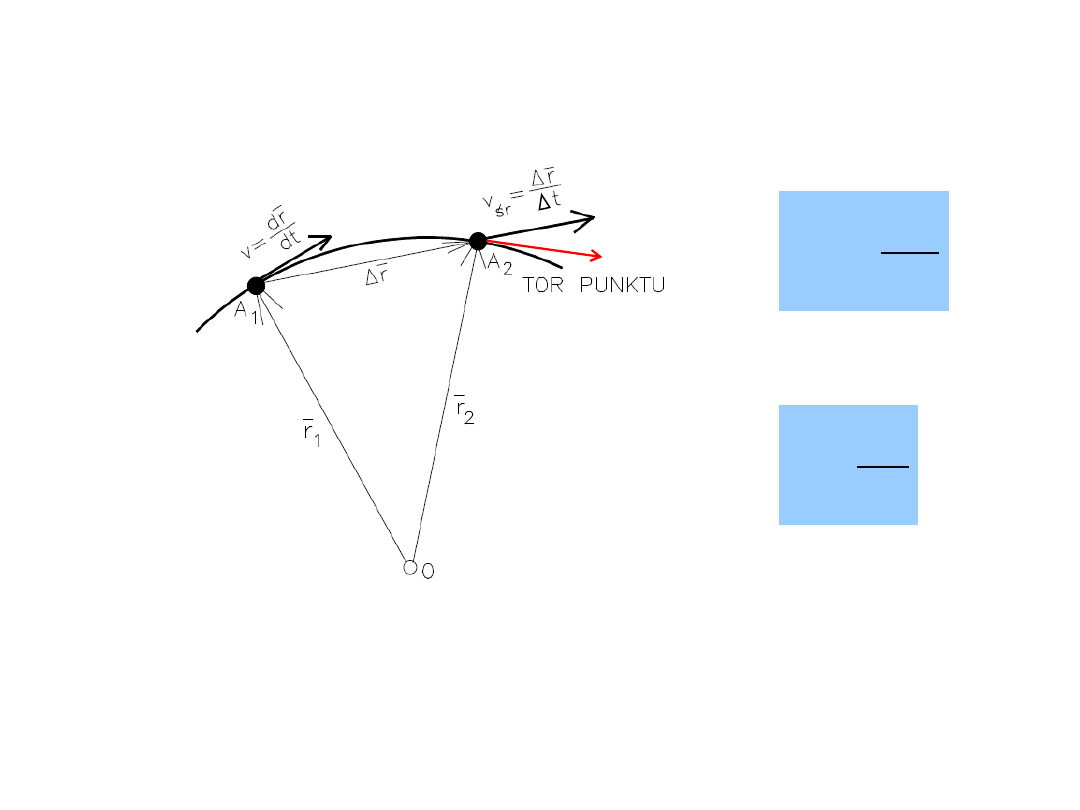
44
Prędkość punktu w ruchu krzywoliniowym
t
r
v
śr
Prędkość średnia punktu
-
stosunek przyrostu promienia wodzącego
do przyrostu czasu.
Prędkość chwilowa
-
granica, do której dąży stosunek przyrostu
promienia wodzącego do przyrostu czasu, jeśli przyrost czasu dąży do
zera (pierwsza pochodna promienia wodzącego względem czasu).
dt
r
d
v
v
2
45
W układzie współrzędnych prostokątnych:
k
v
j
v
i
v
v
z
y
x
dt
dz
v
dt
dy
v
dt
dx
v
z
y
x
,
,
2
2
2
z
y
x
v
v
v
v
- zapis wektorowy
-
składowe wektora prędkości
-
moduł wektora prędkości
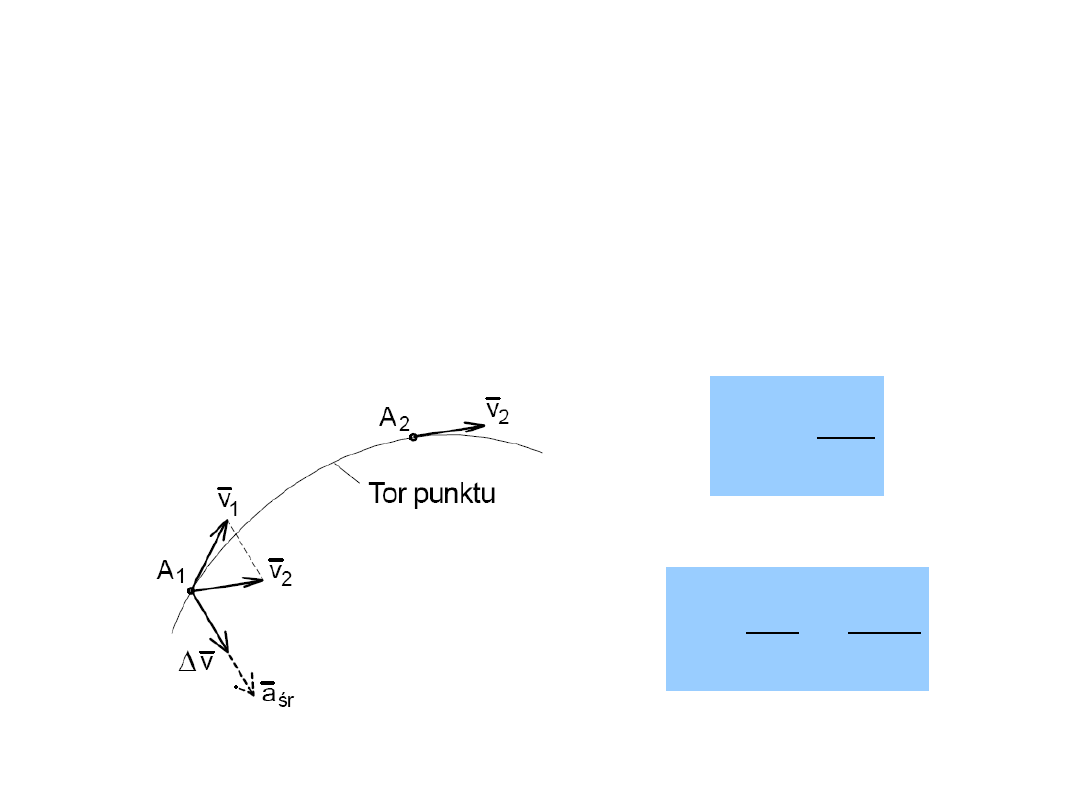
46
Przyśpieszenie punktu
jest wynikiem zmiany kierunku i
wartości prędkości.
Przyśpieszenie punktu w ruchu
krzywoliniowym
2
2
dt
r
d
dt
v
d
a
t
v
a
śr
Przyśpieszenie chwilowe
-
pierwsza pochodna prędkości
względem czasu.
47
W układzie współrzędnych prostokątnych:
k
a
j
a
i
a
a
z
y
x
.
,
,
gdzie
2
2
2
2
2
2
dt
z
d
dt
dv
a
dt
y
d
dt
dv
a
dt
x
d
dt
dv
a
z
z
y
y
x
x

48
1. Podział ze względu na trajektorię ruchu.
Ruch punktu:
- prostoliniowy,
-
po okręgu (harmoniczny prosty),
- dowolny (krzywoliniowy).
Ruch bryły:
-
postępowy,
- obrotowy,
-
płaski,
- kulisty,
- dowolny.
Szczególne przypadki ruchu

49
2. Podział ze względu wartości prędkości i
przyśpieszenia:
-
przyśpieszony jednostajnie (a = const.),
-
przyśpieszony niejednostajnie (a
lub a
),
- jednostajny (v = const),
-
opóźniony jednostajnie (-a = const.),
-
opóźniony niejednostajnie (-a
lub -a
),
Szczególne przypadki ruchu
50
Ruch prostoliniowy
Ruch punktu po linii prostej równoległej do osi OX.
Równanie ruchu:
t
x
x
dt
dx
v
v
x
2
2
dt
x
d
dt
dv
a
a
x
x
x
0
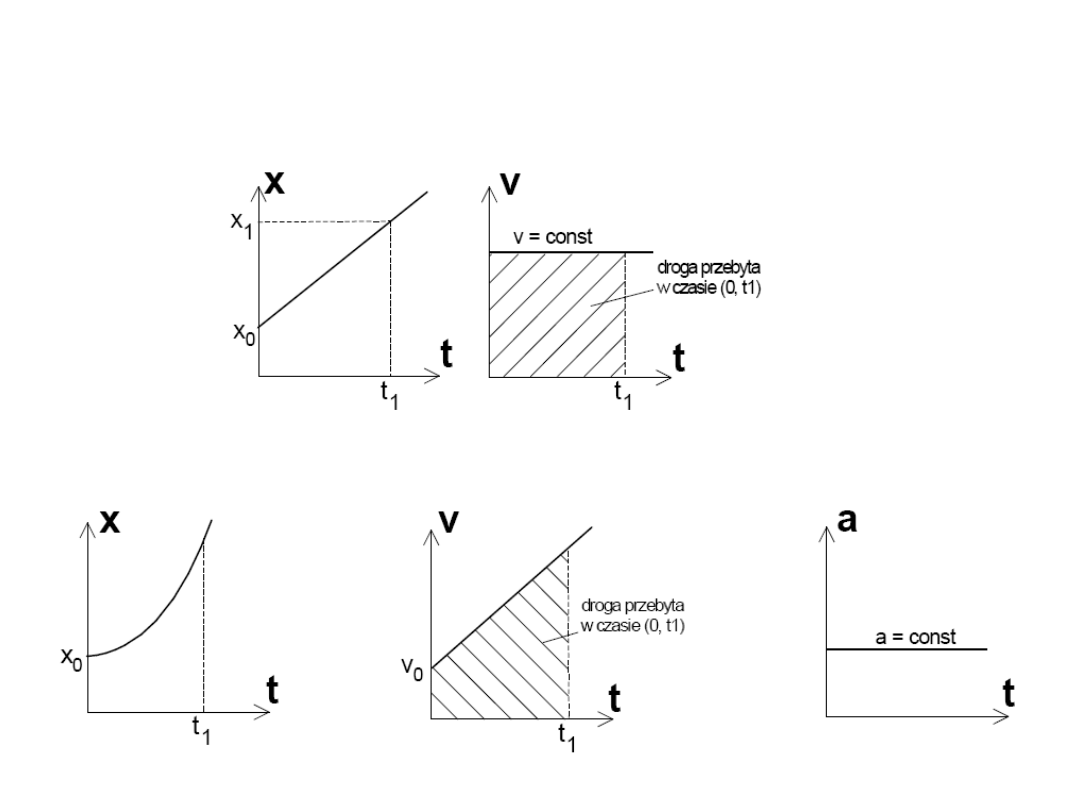
51
Ruch prostoliniowy
Ruch jednostajny:
v
= const.
a
= 0
Ruch jednostajnie przyśpieszony:
a
= const.
52
Ruch krzywoliniowy
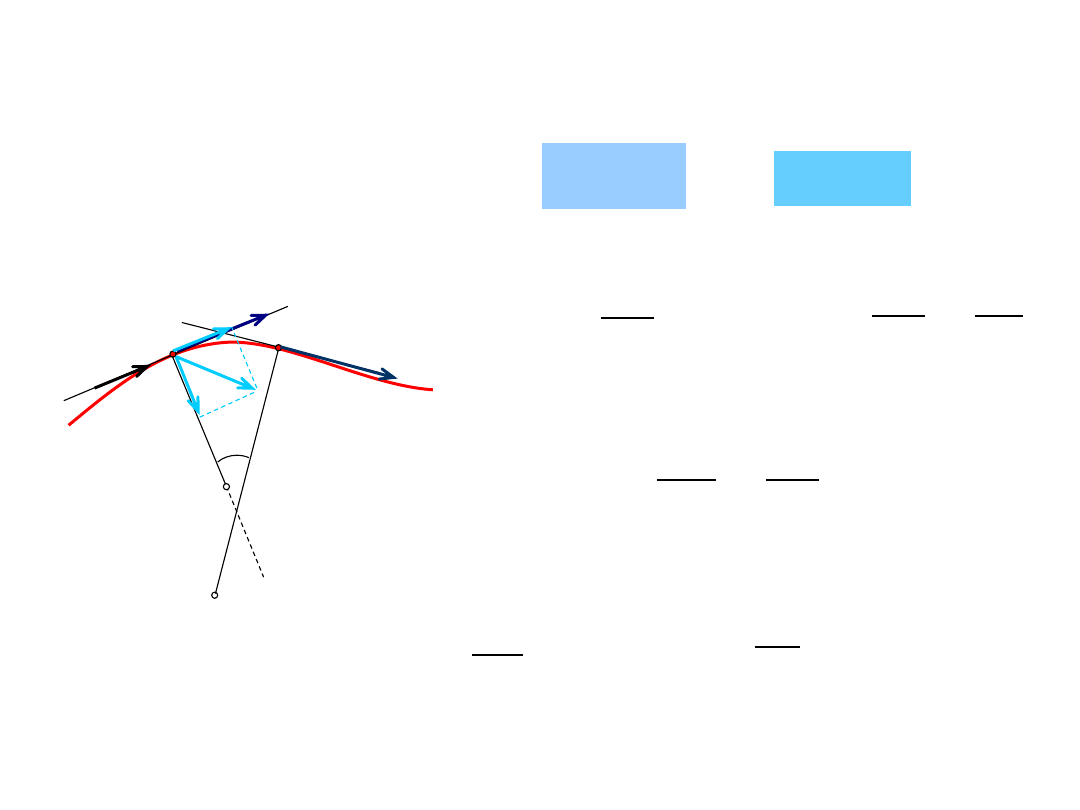
56
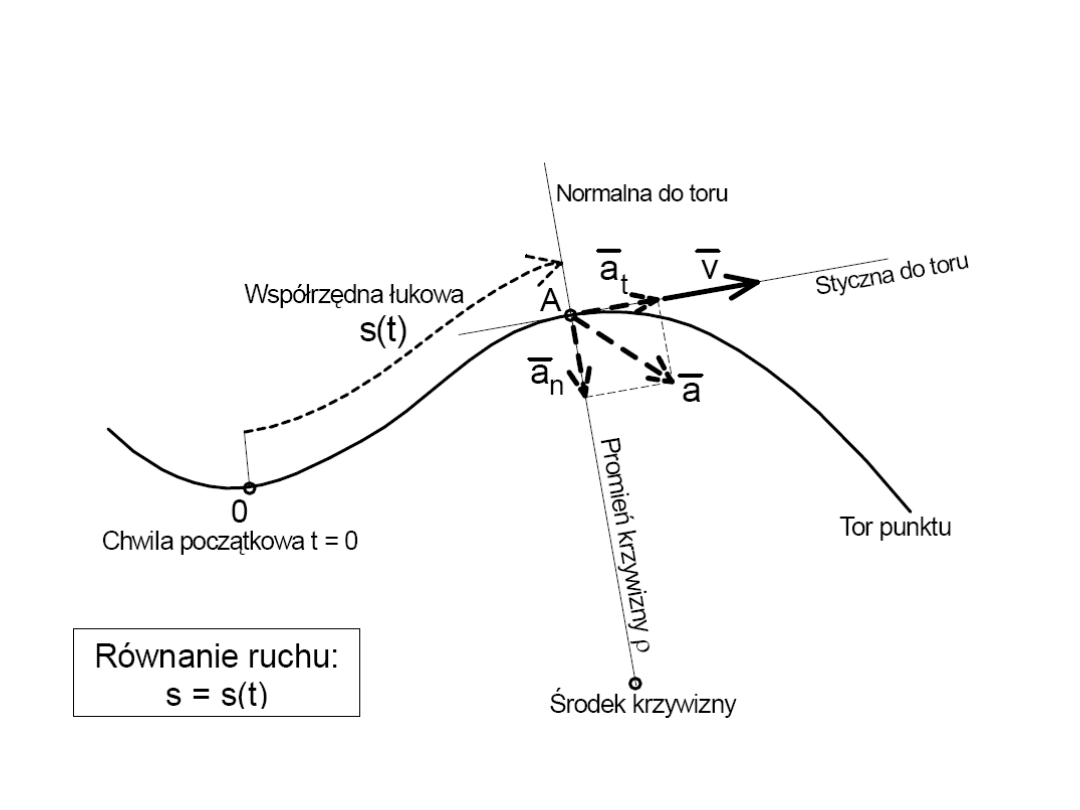
Ruch krzywoliniowy
Równanie ruchu:
t
s
s
s
v
t
s
v
śr
dt
ds
t
s
v
t
0
lim
v
v
dt
v
d
t
v
a
t
0
lim
v
1
dt
dv
a
t
2
v
a
n
a
n
a
t
a
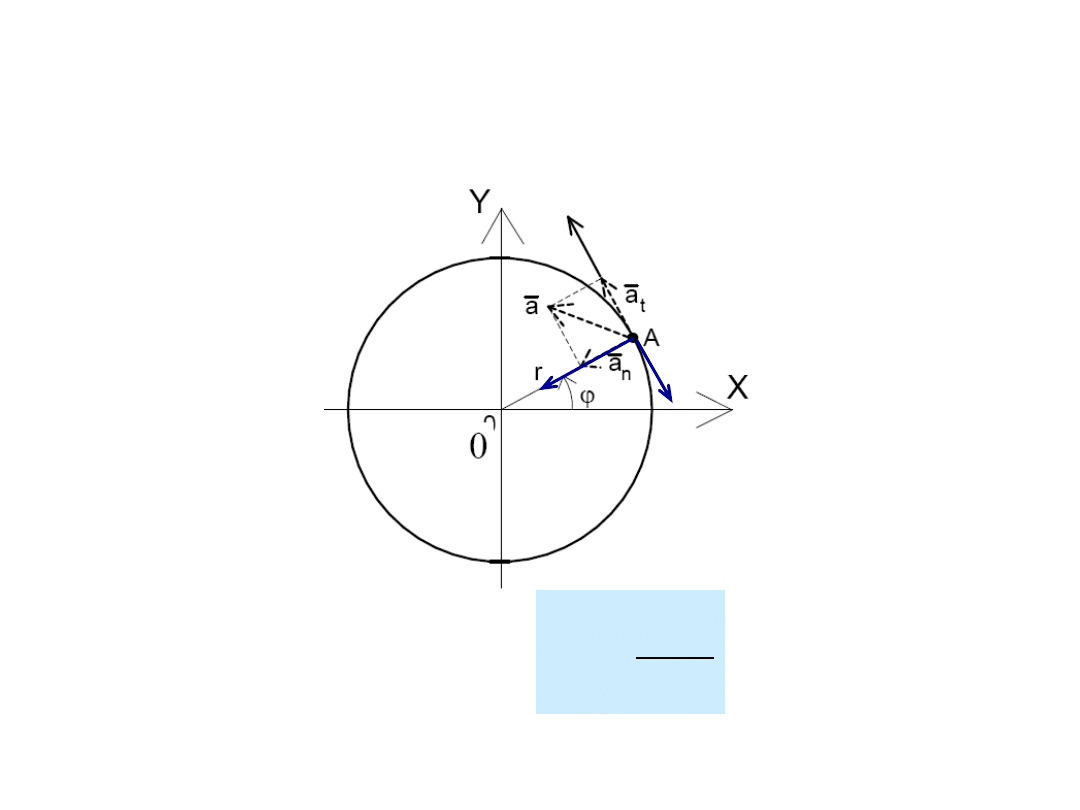
57
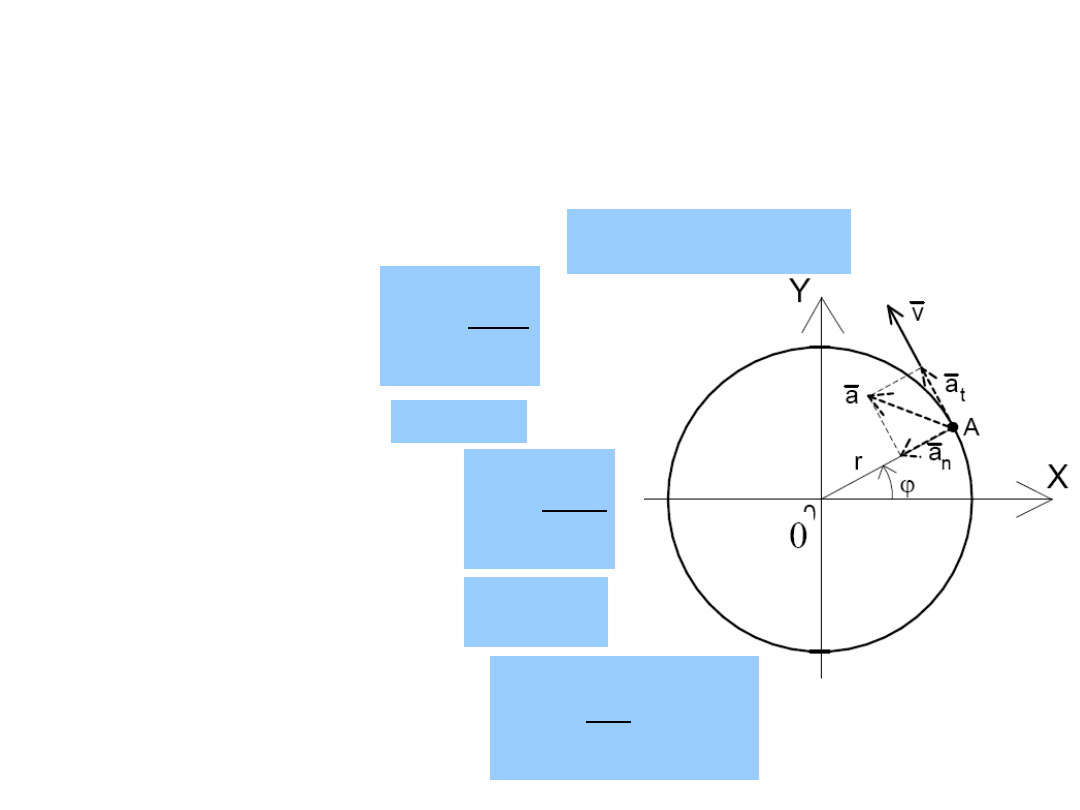
Ruch punktu po okręgu
Ruch punktu po okręgu jest przypadkiem szczególnym
ruchu krzywoliniowego, w którym
= r = const.
Równanie ruchu po okręgu:
t
r
t
s
s
Prędkość kątowa:
Prędkość liniowa:
dt
d
r
v
Przyśpieszenie kątowe:
dt
d
Przyśpieszenie styczne:
r
a
t
Przyśpieszenie normalne:
r
r
v
a
n
2
2
58
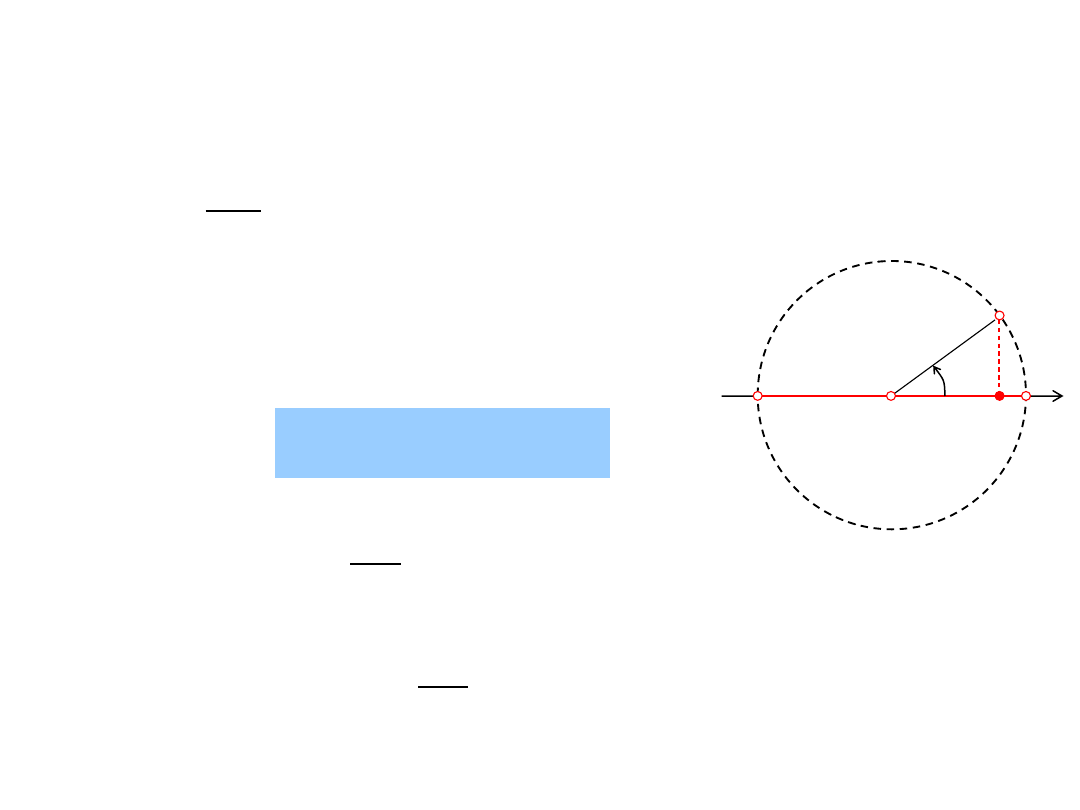
Ruch harmoniczny
Równanie ruchu harmonicznego prostego:
0
cos
t
r
x
Prędkość:
x
t
r
dt
dv
a
2
0
2
cos
0
sin
t
r
dt
dx
v
Przyśpieszenie:
cos
r
x
0
t
const
dt
d
r
A
A’
0
x
x
59
Ruch drgający
-
ruch, w którym występuje okresowa
zmiana współrzędnej.
Okres drgań
-
przedział czasu T, w którym punkt,
wychodząc z pewnego położenia ekstremalnego, wraca
ponownie do niego.
Amplituda drgań
-
największa odległość punktu od środka
drgań.
Faza drgań
-
wartość argumentu funkcji okresowej.
W ruchu harmonicznym:
0
t
T
2
- pulsacja
0
-
faza początkowa
61
Ruch złożony punktu materialnego
Ruch
złożony – wtedy, gdy porusza się układ odniesienia.
Ruch
względny – ruch punktu względem układu
ruchomego (prędkość względna v
w
).
Ruch
bezwzględny – ruch punktu względem nieruchomego
układu odniesienia (prędkość bezwzględna v).
w
u
v
v
v
-
prędkość unoszenia
u
v
r
v
v
u
0
0
v
-
prędkość ruchu postępowego układu odniesienia
-
prędkość kątowa ruchu obrotowego układu odniesienia
r
-
promień wodzący punktu w ruchomym układzie
odniesienia
62
Przyśpieszenie w ruchu złożonym
-
przyśpieszenie bezwzględne
C
w
u
a
a
a
a
un
ut
u
a
a
a
a
0
w
a
-
przyśpieszenie ruchu postępowego układu
odniesienia
w
C
v
a
2
-
przyśpieszenie Coriolisa
-
przyśpieszenie unoszenia
dt
v
d
a
0
0
r
dt
d
a
ut
-
przyśpieszenie styczne związane z ruchem
obrotowym układu odniesienia
r
a
un
-
przyśpieszenie normalne związane z
ruchem obrotowym układu odniesienia
-
przyśpieszenie względem ruchomego układu odniesienia
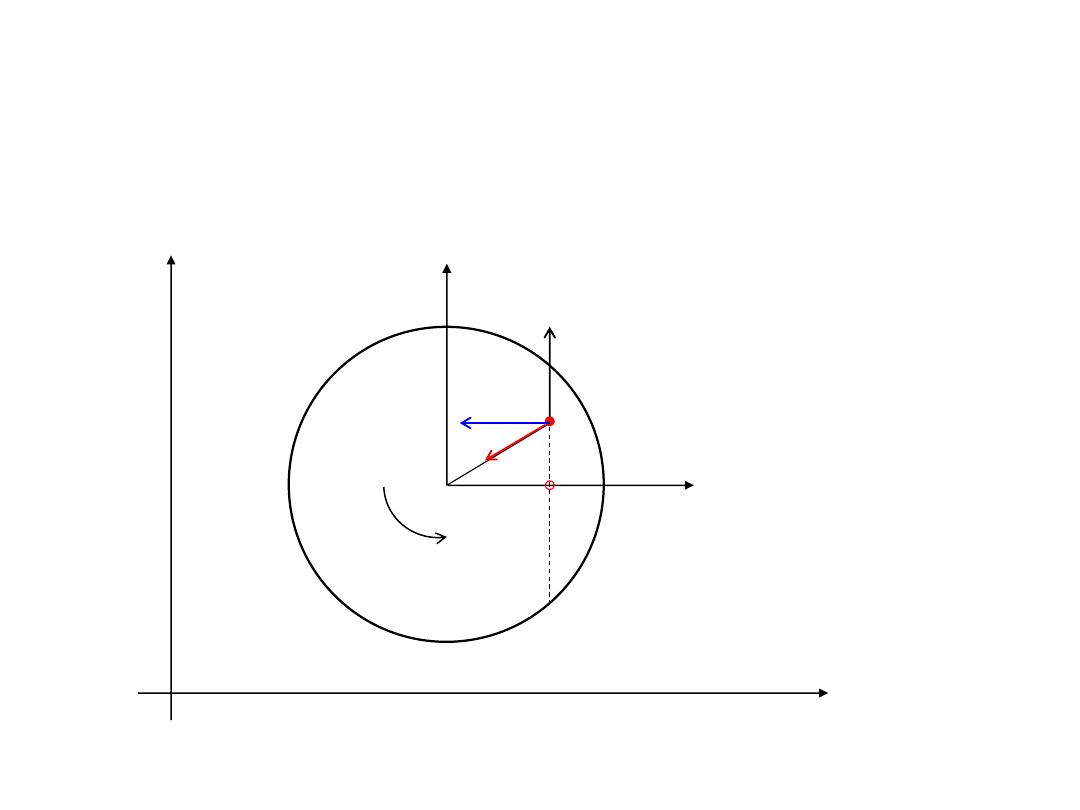
63
y’
y’
x’
r
a
w
a
C
a
un
Przykład: Punkt materialny porusza się z przyśpieszeniem
a
w
= const.
po cięciwie koła wirującego z prędkością
kątową
= const
. W chwili t = 0 ma prędkość względną
v
w
= 0 i zajmuje położenie A
0
. Wyznaczyć przyśpieszenie
punktu.
A
0
y
x
d
r
a
un
2
0
0
a
w
C
v
a
2
C
w
un
a
a
a
a
0
ut
a

64
Ciało sztywne w przestrzeni ma 6 stopni swobody.
Rodzaje ruchu ciała sztywnego:
-
postępowy,
- obrotowy,
-
płaski,
- kulisty,
-
śrubowy,
- dowolny.
Kinematyka ciała sztywnego
65
W ruchu postępowym wszystkie punkty
ciała poruszają się po identycznych
torach, w każdej chwili mają takie same
prędkości i przyspieszenia.
Dla analizy ruchu postępowego ciała
sztywnego wystarczy określenie ruchu
jednego punktu tego ciała.
Ruch postępowy
Przykłady ruchu postępowego:
-
ruch tłoka w cylindrze,
- ruch kabiny windy,
- ruch suwnicy.
66
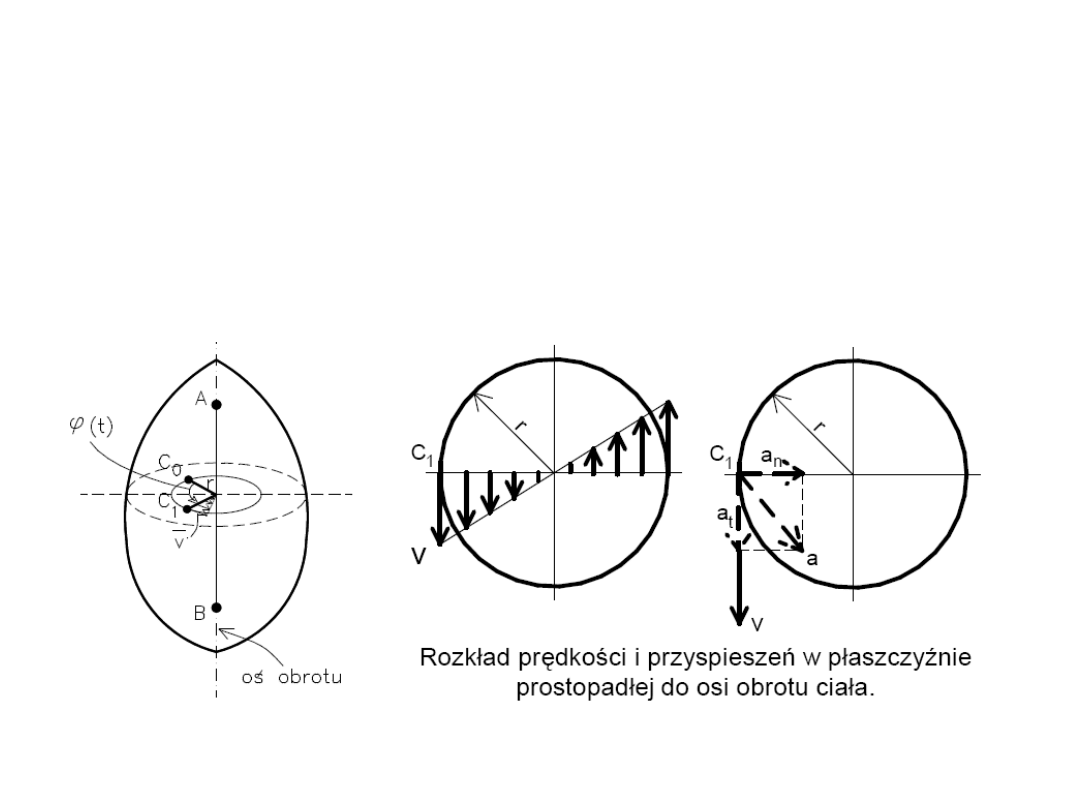
W ruchu obrotowym dwa punkty sztywno związane z ciałem
pozostają nieruchome. Punkty te wyznaczają nieruchomą oś
obrotu
ciała.
Ruch obrotowy
67
Prędkość dowolnego punktu ciała jest równa iloczynowi
prędkości kątowej i odległości od osi obrotu:
Przyśpieszenie styczne:
Przyśpieszenie dośrodkowe:
Przypadki szczególne ruchu obrotowego:
- ruch obrotowy jednostajny,
- ruch obrotowy jednostajnie przyspieszony.
r
v
r
dt
d
r
dt
dv
a
t
2
2
2
2
r
r
r
r
v
a
n
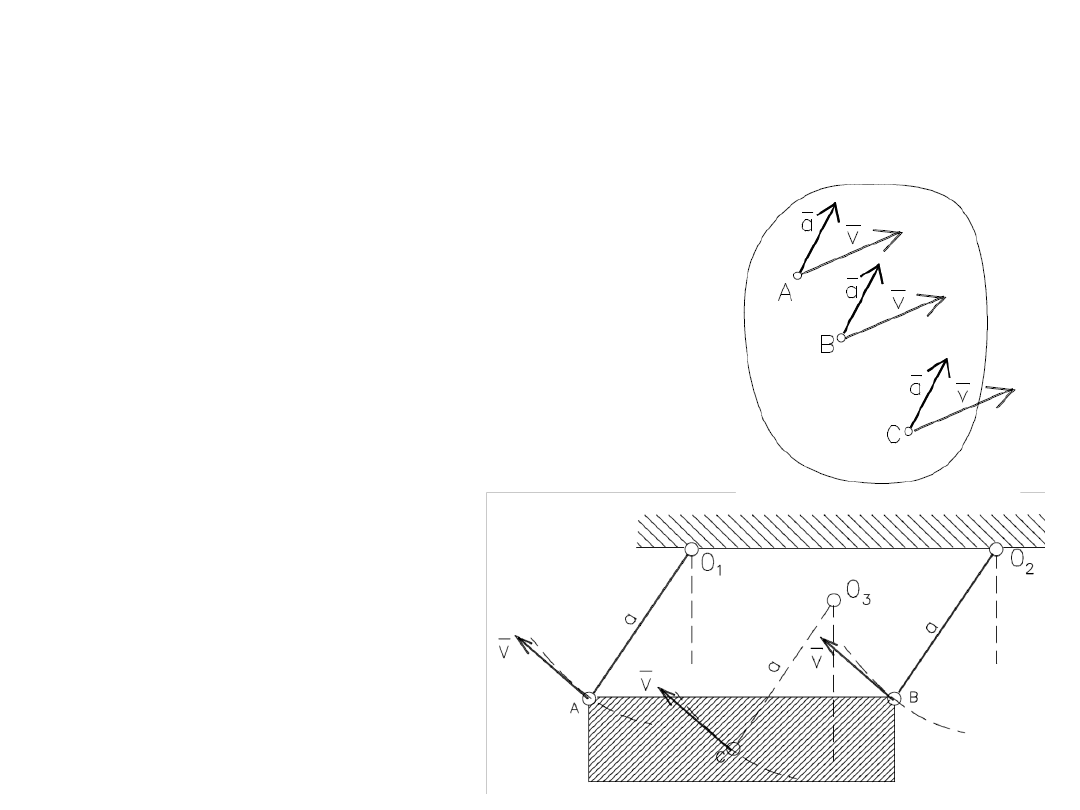
68
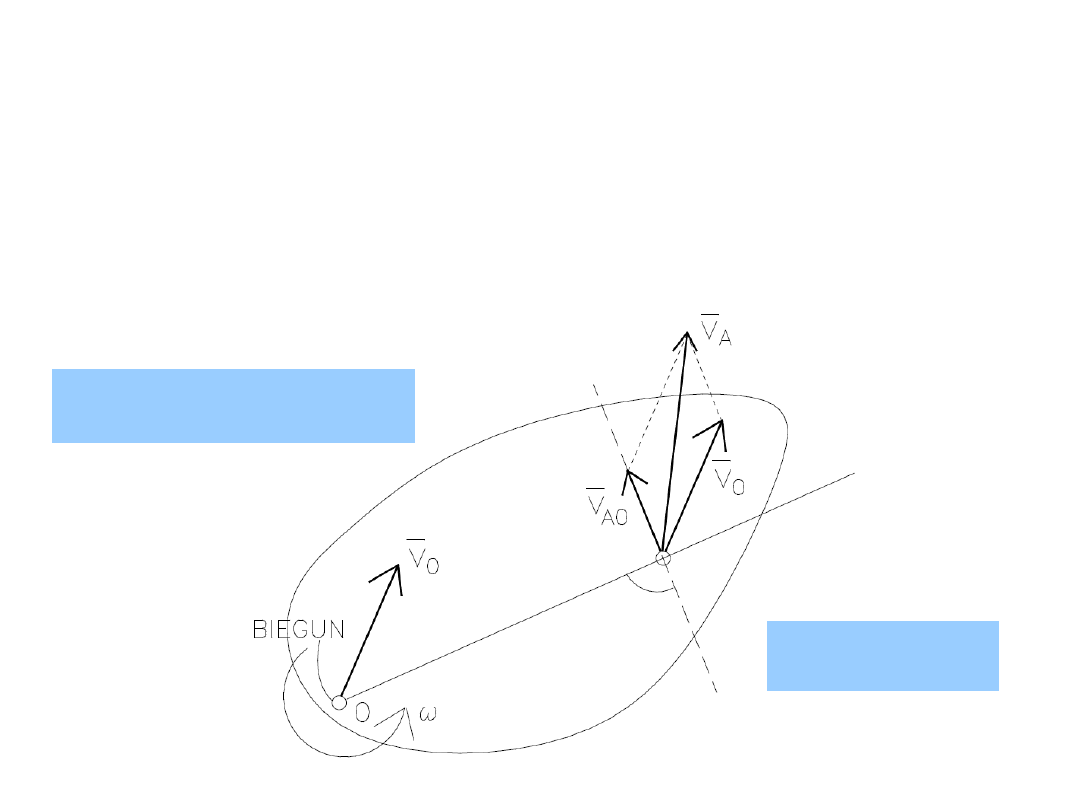
W ruchu płaskim wszystkie punkty ciała poruszają się w
płaszczyznach równoległych do pewnej nieruchomej
płaszczyzny, zwanej płaszczyzną kierującą.
Ruch płaski jest złożeniem chwilowego ruchu postępowego
oraz chwilowego ruchu obrotowego.
Ruch płaski
0
0
A
A
v
v
v
n
A
t
A
A
a
a
a
a
0
0
0
69
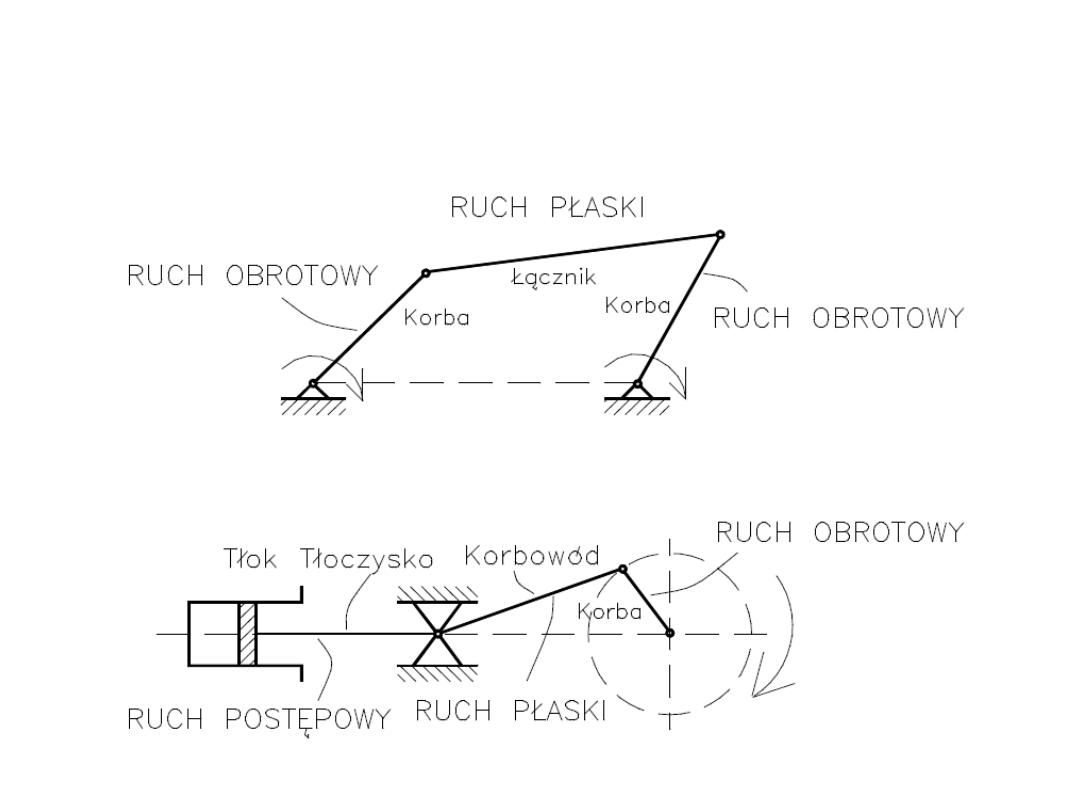
Przykłady ruchu płaskiego

70
W ruchu kulistym jeden punkt ciała jest unieruchomiony.
Ruch ten można traktować jako ruch obrotowy wokół
chwilowej osi przechodzącej przez ten unieruchomiony
punkt.
Ruch kulisty
Ruch ogólny ciała sztywnego
Ruch ogólny ciała sztywnego można traktować jako ruch
złożony z ruchu postępowego dowolnie wybranego punktu
(bieguna) i ruchu obrotowego wokół chwilowej osi
przechodzącej przez ten punkt.

71
Dynamika
-
dział mechaniki zajmujący się badaniem ruchu
ciał materialnych oraz w związków pomiędzy ruchem a
siłami, które ten ruch wywołały.
Podstawowe pojęcie dynamiki – siła.
Siła
-
wynik wzajemnego, mechanicznego oddziaływania na
siebie co najmniej dwóch ciał. Skutkiem tego oddziaływania
jest wyprowadzenie ciała ze stanu spoczynku lub zmiana
parametrów ruchu ciała już poruszającego się.
Podstawą dynamiki są trzy prawa Newtona (1643-1727)
zwane zasadami dynamiki.
Dynamika
73
Przyśpieszenie punktu materialnego jest wprost
proporcjonalne do siły działającej na ten punkt i ma kierunek
tej siły.
Druga zasada dynamiki Newtona
(prawo zmienności ruchu)
P
a
m
Równanie dynamiki ruchu punktu materialnego:
P
-
wypadkowa siła działająca na punkt materialny,
a
-
przyśpieszenie wywołane siłą P,
m
-
masa (miara bezwładności punktu materialnego).
76
Zagadnienie proste dynamiki
-
znane jest równanie ruchu
x = x(t) a szukany jest przebieg czasowy siły P(t).
Zagadnienie odwrotne dynamiki
– dana jest siła P, która
może być funkcją czasu, położenia i prędkości:
a szukane jest równanie ruchu x = x(t).
Równanie dynamiki ruchu prostoliniowego
punktu materialnego
x
P
dt
x
d
m
2
2
x
x
t
P
P
,
,
77
Siła ciężkości:
Równanie dynamiki ruchu:
Ruch punktu materialnego pod wpływem
siły ciężkości (spadek pionowy)
g
dt
x
d
2
2
const
g
m
G
2
,
2
0
0
0
gt
t
v
x
x
gt
v
v
x
ruch jednostajnie
przyśpieszony
78
Siła oporu aerodynamicznego w powietrzu:
Wypadkowa siła:
Równanie dynamiki:
Spadek pionowy w ośrodku stawiającym opór
2
x
kv
R
t
m
gk
k
m
t
x
cosh
ln
2
x
x
kv
mg
R
G
P
2
2
2
dt
dx
m
k
g
dt
x
d
Gdy x
0
=0 i v
0
=0, to
równanie ruchu ma postać:
t
m
gk
k
mg
t
v
x
tgh
Przebieg czasowy
prędkości:

79
Punkt swobodny porusza się zawsze w kierunku działania
wypadkowej siły P.
Jeśli na punkt materialny działają więzy, kierunek ruchu nie
pokrywa się z kierunkiem działania siły.
Występuje wtedy siła reakcji więzów R.
Ruch prostoliniowy nieswobodnego
punktu materialnego
80
y
x
P
m
tor ruchu = kierunek ruchu
kierunek działania siły
0
T
siła tarcia
R
y
siła reakcji toru w osi y
R
wypadkowa siła reakcji więzów
T
P
dt
x
d
m
x
2
2
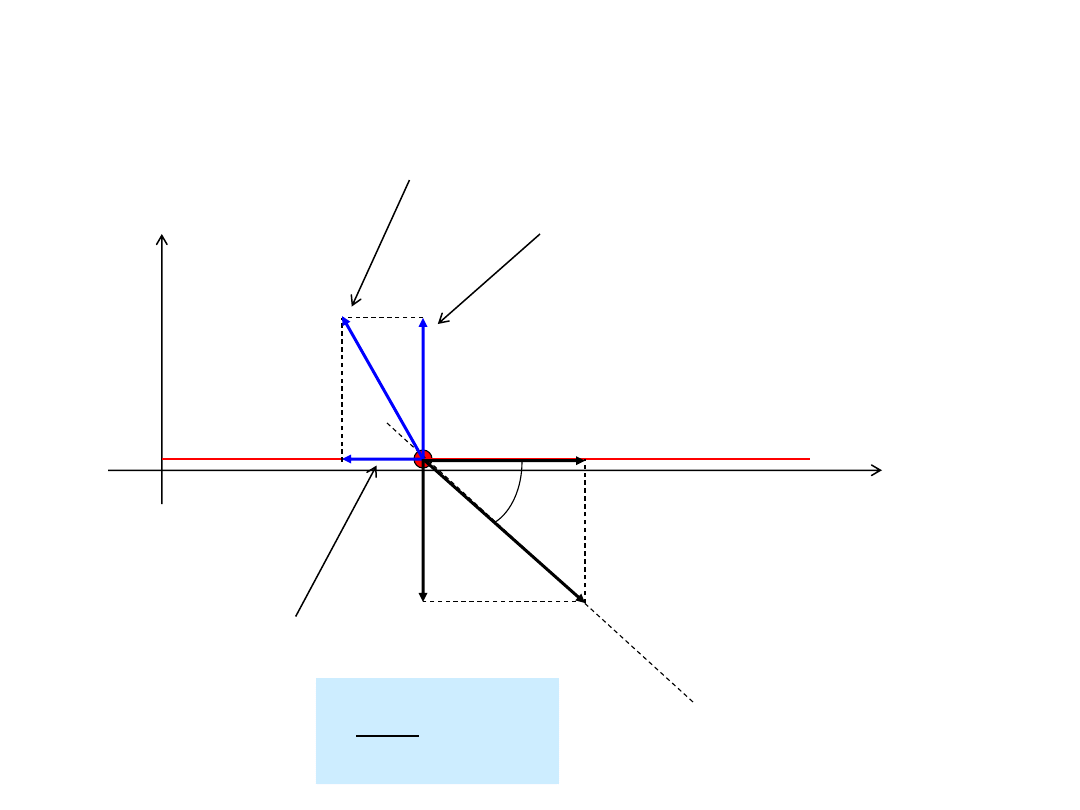
Przykład 1: Siła czynna P działa na punkt materialny pod kątem
względem toru, po którym porusza się punkt, w obecności siły tarcia T.
P
x
P
y
cos
P
P
x
sin
P
P
y
y
y
P
R
81
y
x
G
m
0
T
G
dt
x
d
m
x
2
2
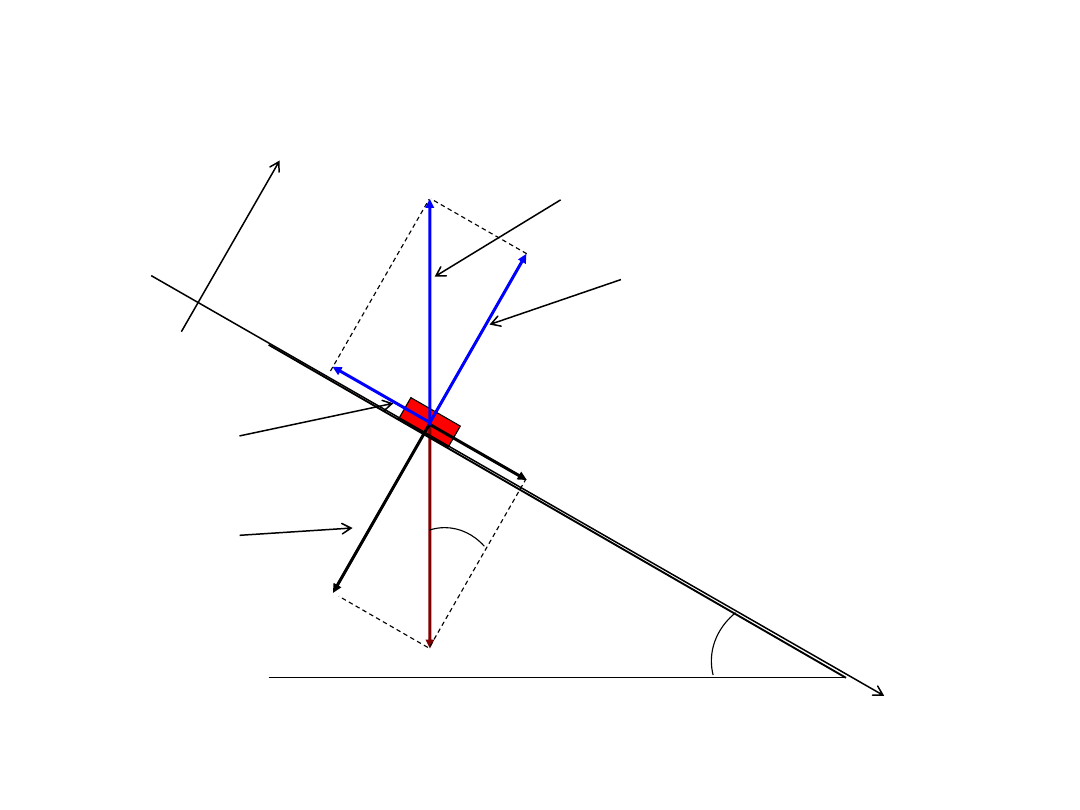
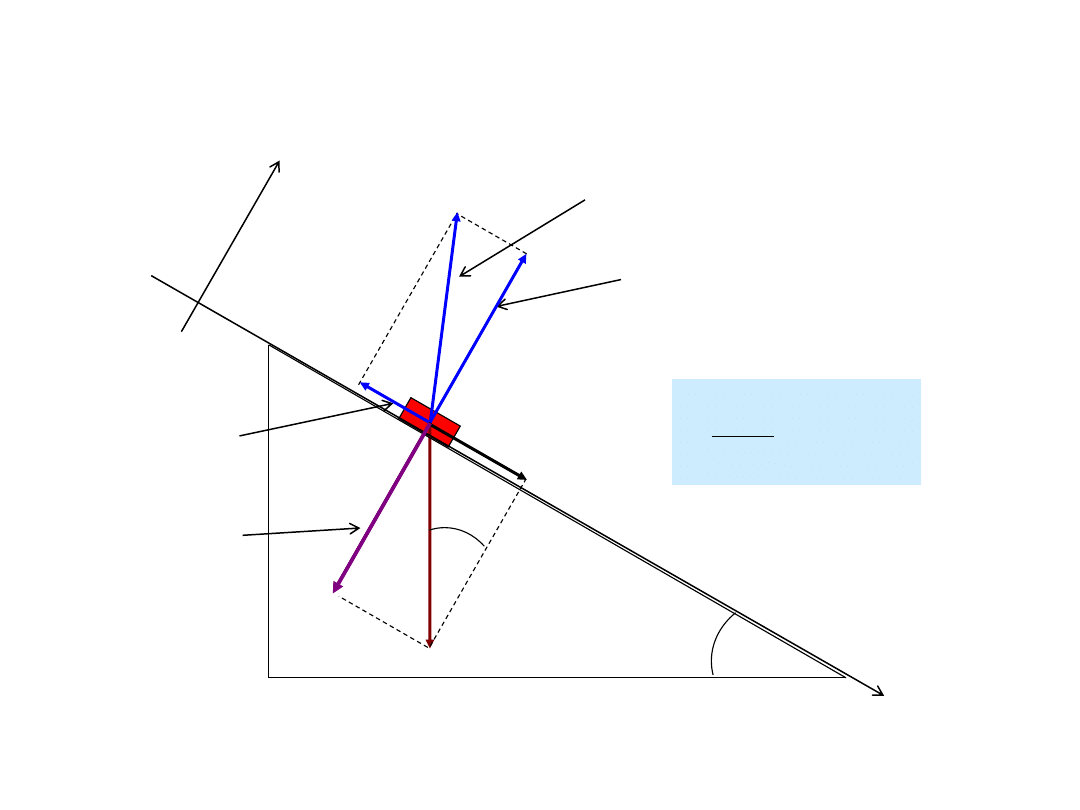
Przykład 2: Ciało o masie m porusza się pod wpływem siły ciężkości
po równi pochyłej o kącie
i współczynniku tarcia
.
R
wypadkowa siła reakcji
T
siła tarcia
mg
G
R
y
reakcja normalna równi
sin
G
G
x
cos
G
G
y
G
y
G
x
cos
mg
N
T
y
y
G
R
y
R
N
siła nacisku
N
82
y
x
P
G
T
m
0
T
P
ma
x
x
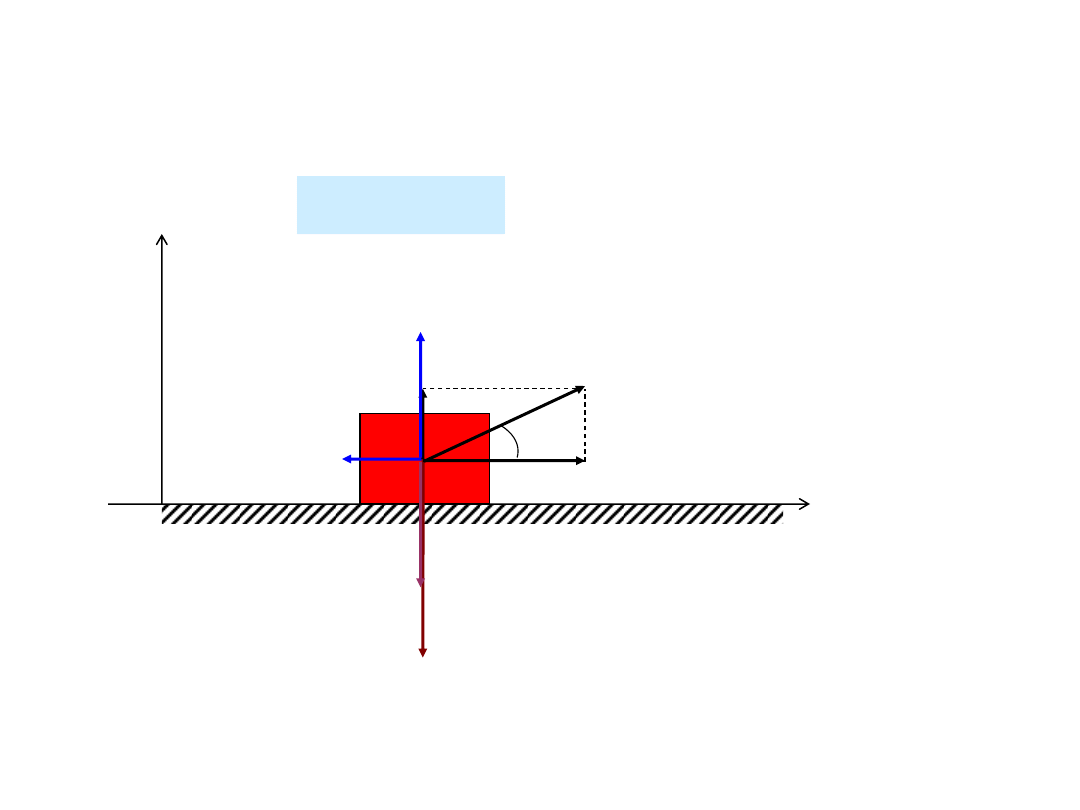
Przykład 3: Znaleźć przyśpieszenie ciała o masie m, do którego
przyłożono siłę P pod kątem
względem płaszczyzny ruchu.
y
R
N
N
P
x
cos
P
P
x
sin
P
P
y
P
y
R
y
G
R
P
y
y
y
P
G
N
T
83
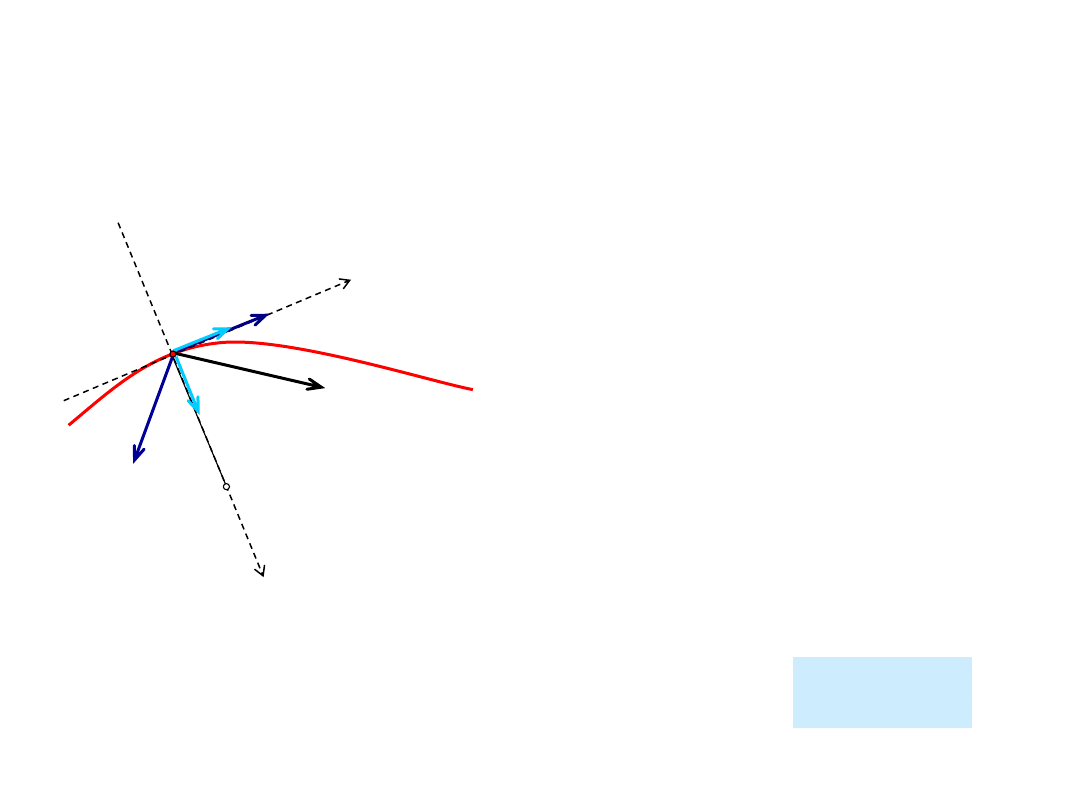
Ruch krzywoliniowy nieswobodnego
punktu materialnego
R
v
a
n
a
t
P
n
Jeśli więzy nałożone na punkt
materialny są idealne, siła reakcji
więzów działa wzdłuż normalnej
do toru.
Jeśli więzy są rzeczywiste, siła
reakcji więzów R ma dwie
składowe: normalną R
n
i styczną R
t
.
N
R
n
n
t
R
N
T
R
n
t
R
R
84
R
n
P
t
R
t
Ruch punktu materialnego po okręgu
R
n
– siła dośrodkowa
r
mv
R
n
2
85
Podczas ruchu punktu materialnego, w
każdej chwili
wszystkie siły rzeczywiste działające na punkt oraz siła
bezwładności pozostają w równowadze.
a
m
A
Zasada d’Alemberta umożliwia stosowanie równań
równowagi sił w analizie dynamiki ruchu punktu
materialnego:
Zasada
d’Alemberta
-
siła bezwładności (siła d’Alemberta)
Siła bezwładności jest zawsze skierowana przeciwnie
do przyśpieszenia.
0
R
P
A
86
Ruch punktu materialnego pod wpływem siły P
x
proporcjonalnej do wychylenia od stanu równowagi.
Drgania liniowe
cx
P
x
Równanie dynamiki ruchu:
cx
dt
x
d
m
2
2
Rozwiązanie ogólne:
t
C
t
C
x
0
2
0
1
cos
sin
m
c
0
-
pulsacja drgań własnych
87
Oprócz siły P
x
proporcjonalnej do wychylenia działa siła
oporu ruchu R
x
proporcjonalna do prędkości:
Drgania liniowe z tłumieniem
x
x
R
Równanie dynamiki ruchu:
x
cx
dt
x
d
m
2
2
Podstawiając:
,
0
m
c
otrzymuje się:
m
n
2
0
2
2
0
2
2
x
dt
dx
n
dt
x
d
-
równanie różniczkowe 2-go
rzędu o stałych współczynnikach
88
Rozwiązanie:
1. Jeżeli n <
0
(tłumienie podkrytyczne) - drgania tłumione:
t
n
C
t
n
C
e
x
nt
2
2
0
2
2
2
0
1
cos
sin
2. Jeżeli n >
0
(tłumienie nadkrytyczne) - przebieg
aperiodyczny:
t
n
n
t
n
n
e
C
e
C
x
2
0
2
2
0
2
2
1
3
. Jeżeli n =
0
- przebieg aperiodyczny krytyczny:
nt
nt
te
C
e
C
x
2
1
89
Ruch punktu materialnego pod wpływem siły P
x
proporcjonalnej do wychylenia:
Drgania wymuszone nietłumione
cx
P
x
Równanie dynamiki ruchu:
t
F
cx
dt
x
d
m
cos
max
2
2
Rozwiązanie:
t
m
F
t
C
t
C
x
cos
1
cos
sin
2
2
0
max
0
2
0
1
oraz siły F
x
będącej okresową funkcją czasu:
t
F
F
x
cos
max

90
Drgania wymuszone tłumione
Równanie dynamiki ruchu:
t
F
v
cx
dt
x
d
m
x
cos
max
2
2
Po podstawieniach i przekształceniu:
Oprócz siły P
x
proporcjonalnej do wychylenia działa siła
oporu ruchu R
x
proporcjonalna do prędkości oraz siła F
x
będąca okresową funkcją czasu.
t
m
F
x
dt
dx
n
dt
x
d
cos
2
max
2
0
2
2
91
Pęd punktu materialnego
-
pęd punktu materialnego.
v
m
Wektor:
Gdy na punkt materialny nie działa żadna siła lub
działające siły się równoważą to pęd tego punktu
pozostaje stały.
Zasada zachowania pędu:
const
v
m
P
0
Z drugiej zasady dynamiki Newtona
i wzoru definicyjnego przyśpieszenia
wynika, że:
P
v
m
dt
d
P
a
m
dt
v
d
a

92
Zmiana pędu punktu materialnego w skończonym
przedziale czasu jest równa impulsowi siły działającej
na ten punkt w tym samym czasie.
Impuls siły
2
1
t
t
dt
P
S
Wielkość wektorowa charakteryzująca dynamiczne
skutki działania siły w skończonym przedziale czasu to
impuls siły:
)
(
)
(
1
2
2
1
v
m
v
m
v
m
v
m
d
S
mv
mv
Zasada zachowania pędu dla punktu materialnego ma
również zastosowanie dla środka ciężkości bryły sztywnej.
93
v
m
r
K
o
Moment pędu (kręt) punktu materialnego
-
moment pędu względem bieguna 0.
z
y
x
o
mv
mv
mv
z
y
x
k
j
i
K
Moment pędu względem danej osi jest równy składowej
na tę oś momentu pędu względem bieguna 0.
y
v
x
v
m
K
x
v
z
v
m
K
z
v
y
v
m
K
x
y
oz
z
x
oy
y
z
ox
rmv
K
o
Jeśli
,to:
v
r
94
o
o
M
v
m
r
dt
d
dt
K
d
Zasada zachowania momentu pędu
-
moment siły P względem bieguna 0.
Pochodna momentu pędu względem bieguna równa jest
momentowi wypadkowej siły względem tego bieguna.
P
r
M
o
Zasada zachowania momentu pędu:
Jeżeli moment wypadkowej siły zewnętrznej względem
bieguna jest równy zeru, to moment pędu względem tego
bieguna pozostaje stały.
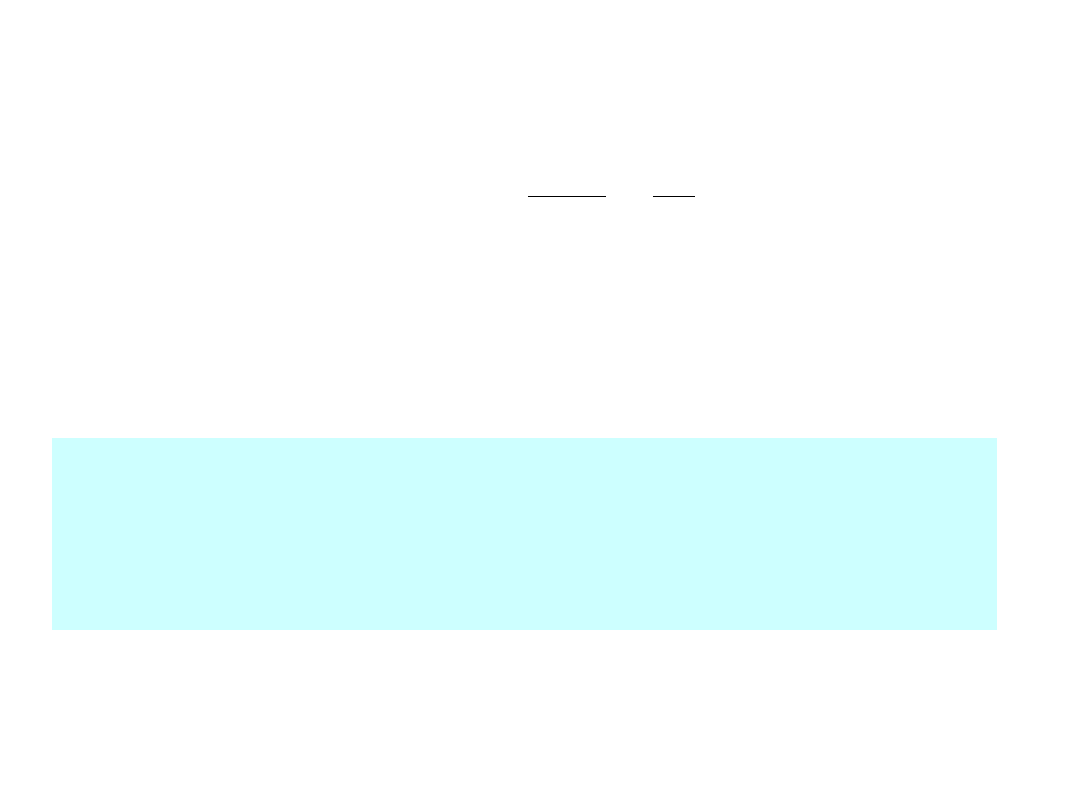
Moment pędu bryły sztywnej względem bieguna w ruchu
postępowym jest równy momentowi pędu środka ciężkości
bryły względem tego bieguna.
Pochodna momentu pędu:
95
y
z
x
0
Moment pędu bryły sztywnej w ruchu postępowym
v
r
m
v
r
m
v
m
r
K
n
i
i
i
n
i
i
i
n
i
i
i
1
1
1
0
Wypadkowy moment pędu bryły
względem bieguna 0:
Stąd:
v
r
M
K
c
0
Wniosek: moment pędu bryły względem bieguna w ruchu
postępowym jest równy momentowi pędu środka masy bryły
względem tego bieguna.
v
m
2
r
2
r
1
m
1
v
m
i
r
i
v
M
r
c
v
c
n
i
i
i
r
M
r
m
1
Z definicji środka masy:
v
M
r
K
c
0
96
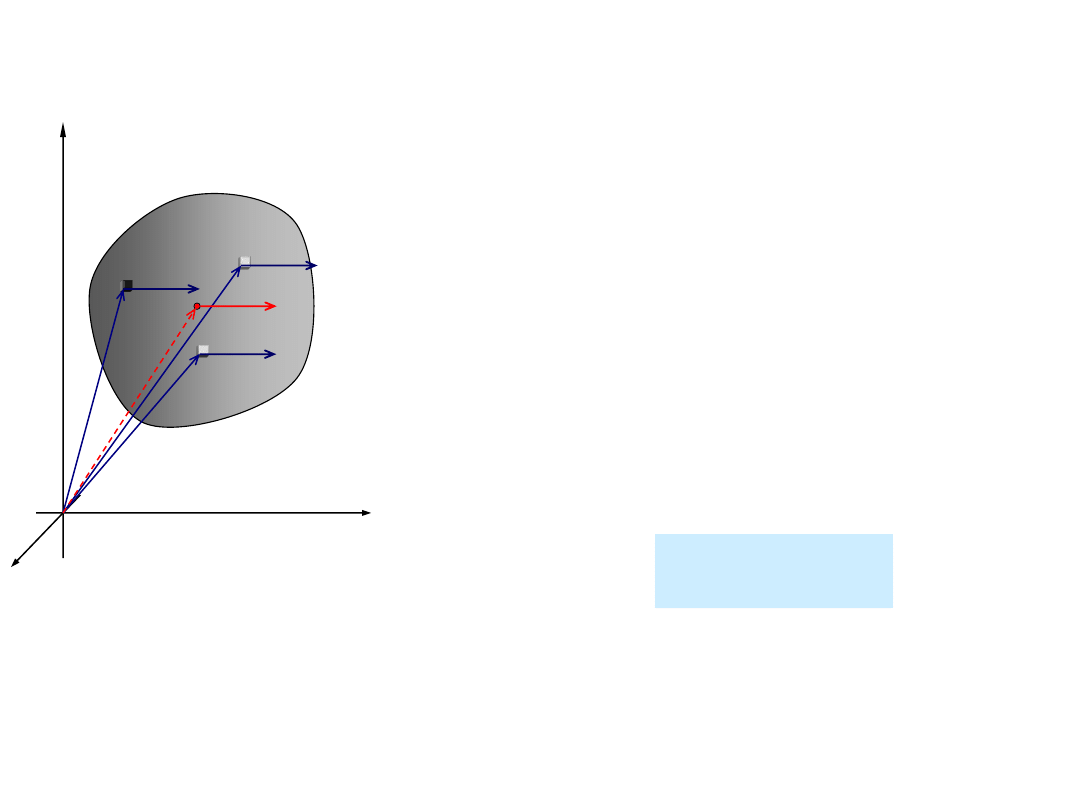
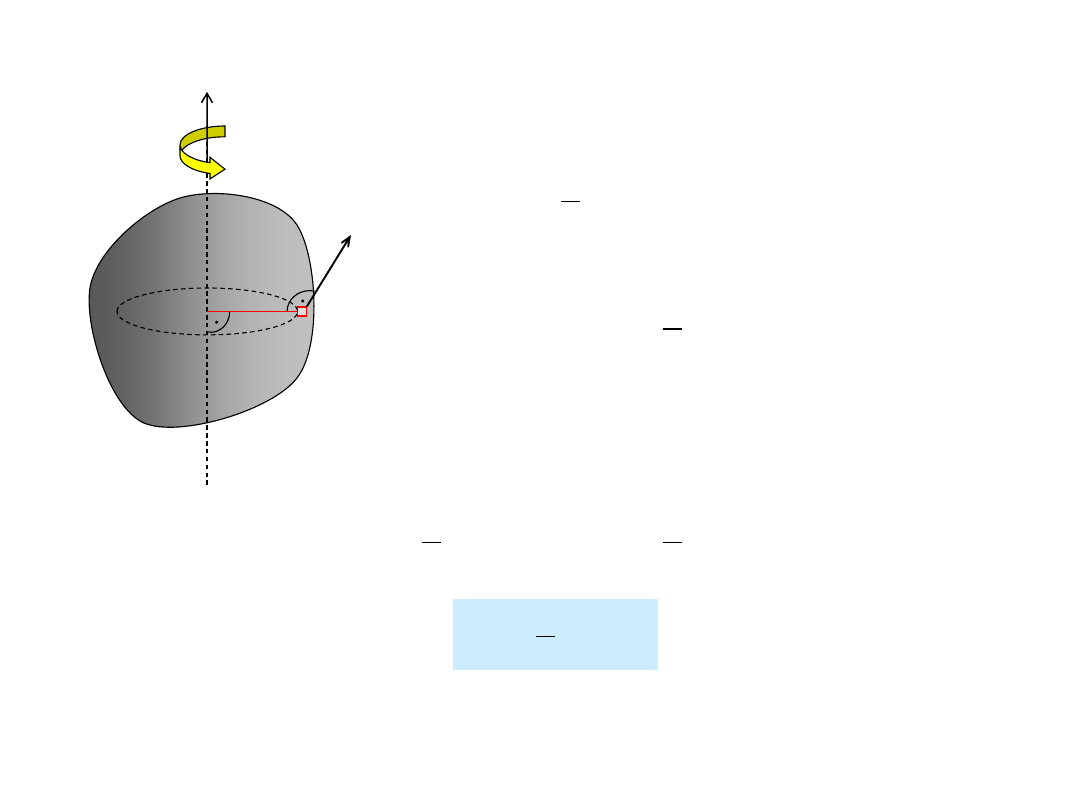
Moment pędu bryły sztywnej w ruchu obrotowym
h
dm
v
z
h
v
Prędkość liniowa elementu dm:
Moment pędu elementu dm
względem osi z:
dm
h
v
dm
h
dK
z
2
Całkowity moment pędu bryły
względem osi z:
z
M
M
z
J
dm
h
dm
h
K
2
2
M
z
dm
h
J
2
-
moment bezwładności bryły
względem osi z
M
97
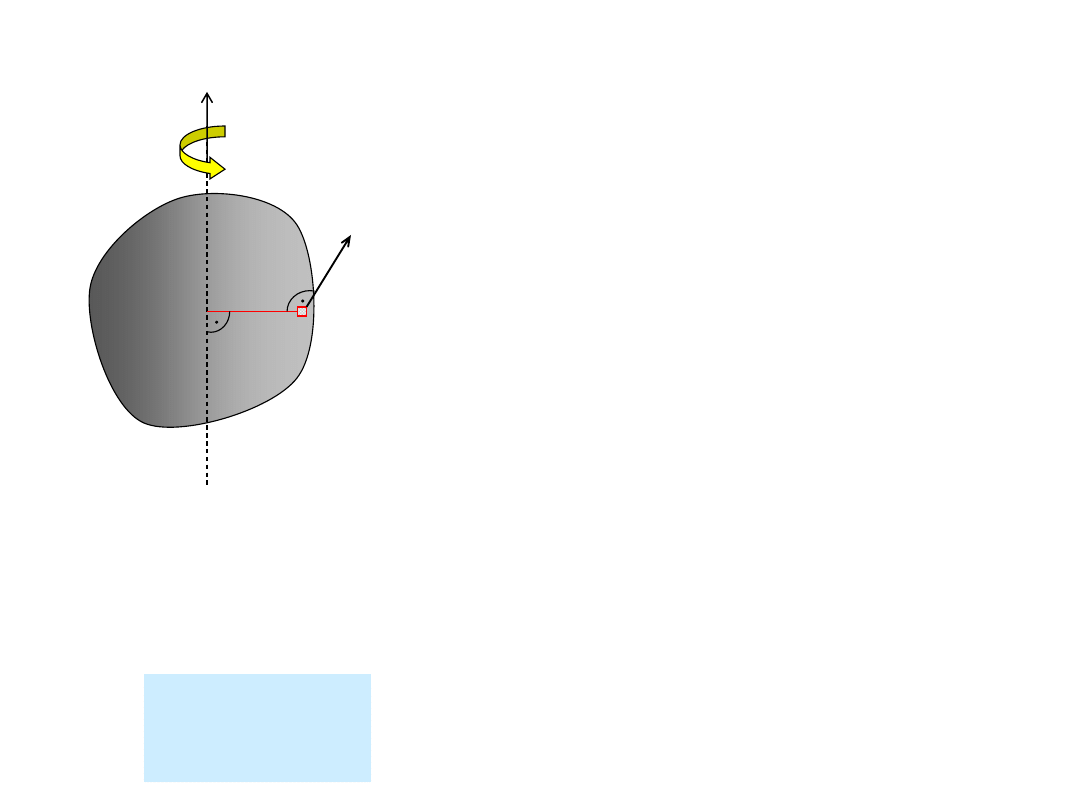
Przykład 1: Obliczyć moment bezwładności jednorodnego pręta o masie m
i długości
l
względem osi przechodzącej przez jego: a) środek, b) koniec.
Przykład 2: Obliczyć moment bezwładności jednorodnego walca o masie
m i promieniu R względem jego osi symetrii.
0
z
x
dx
x
l
dx
l
m
dm
12
2
2
/
2
/
2
2
ml
dx
x
l
m
dm
x
J
l
l
m
z
3
2
0
2
2
ml
dx
x
l
m
dm
x
J
m
l
z
a)
0
z
x
dx
x
l
b)
Twierdzenie Steinera
: moment bezwładności bryły względem dowolnej osi
jest równy sumie momentu bezwładności bryły względem osi równoległej
przechodzącej przez środek masy bryły oraz iloczynu masy bryły i kwadratu
odległości między tymi osiami.
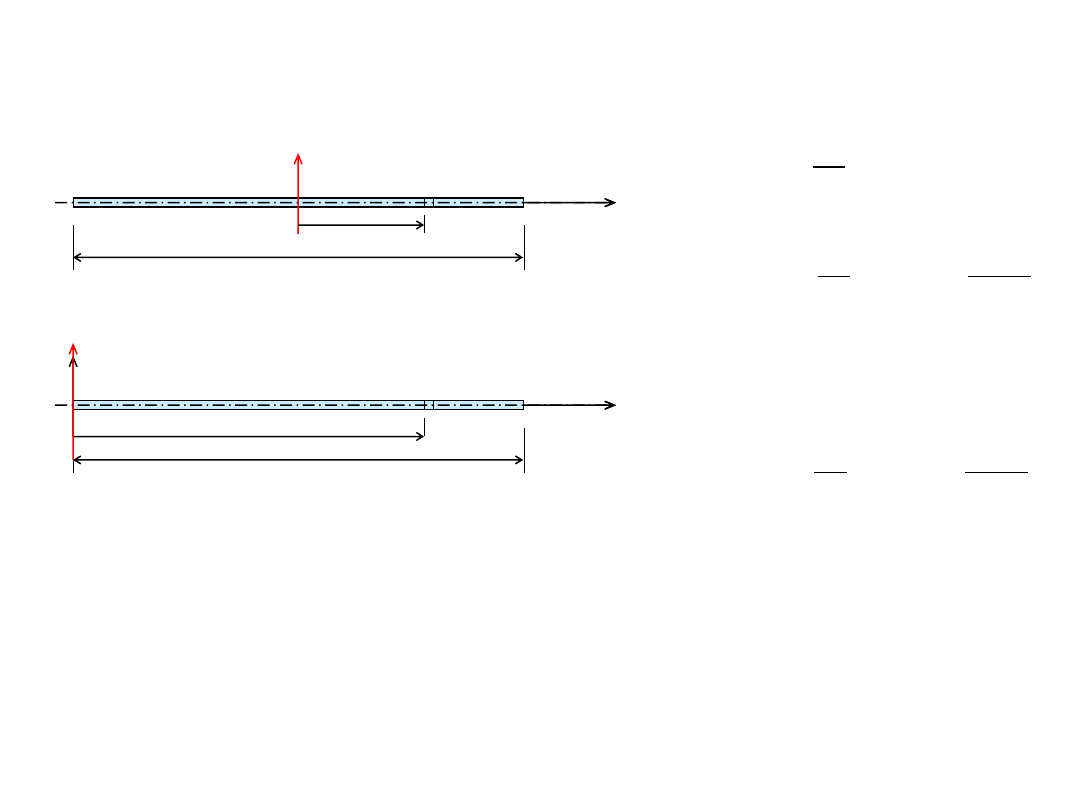
98
Równanie dynamiki bryły sztywnej w ruchu obrotowym
z
z
M
dt
dK
-
suma wszystkich momentów względem osi z.
n
i
iz
z
M
M
1
Pochodna momentu pędu względem osi z:
z
z
J
K
-
moment pędu bryły względem osi z.
dt
d
J
J
dt
d
z
z
-
dla bryły sztywnej J
z
= const.
z
z
M
dt
d
J
-
równanie dynamiki bryły
99
2
2
1
mv
E
Energia kinetyczna
- energia kinetyczna punktu materialnego
n
i
i
i
v
m
E
1
2
2
-
energia kinetyczna układu n punktów
materialnych
2
2
mv
E
-
energia kinetyczna ciała sztywnego
poruszającego się ruchem postępowym
100
Energia kinetyczna bryły sztywnej w ruchu obrotowym
2
2
1
v
dm
dE
h
dm
v
z
Energia kinetyczna elementu dm:
Stąd:
Całkowita energia kinetyczna bryły:
dm
v
dE
E
2
2
1
dm
h
J
z
2
-
moment bezwładności bryły
względem osi z
z
J
E
2
2
1
const
h
v
,
Prędkość liniowa elementu dm:
dm
h
dm
h
E
2
2
2
1
2
2
2
1
101
Energia kinetyczna bryły sztywnej w ruchu złożonym
2
2
2
2
z
c
J
mv
E
v
c
– prędkość chwilowa środka masy bryły sztywnej,
J
z
– moment bezwładności bryły względem osi
chwilowego obrotu, przechodzącej przez środek masy,
-
chwilowa prędkość kątowa wokół osi chwilowego
obrotu.
Ruch złożony bryły sztywnej – złożenie:
-
ruchu krzywoliniowego środka masy bryły z prędkością
chwilową v
c
-
ruchu obrotowego z prędkością kątową
wokół chwilowej
osi, przechodzącej przez środek masy bryły.
102
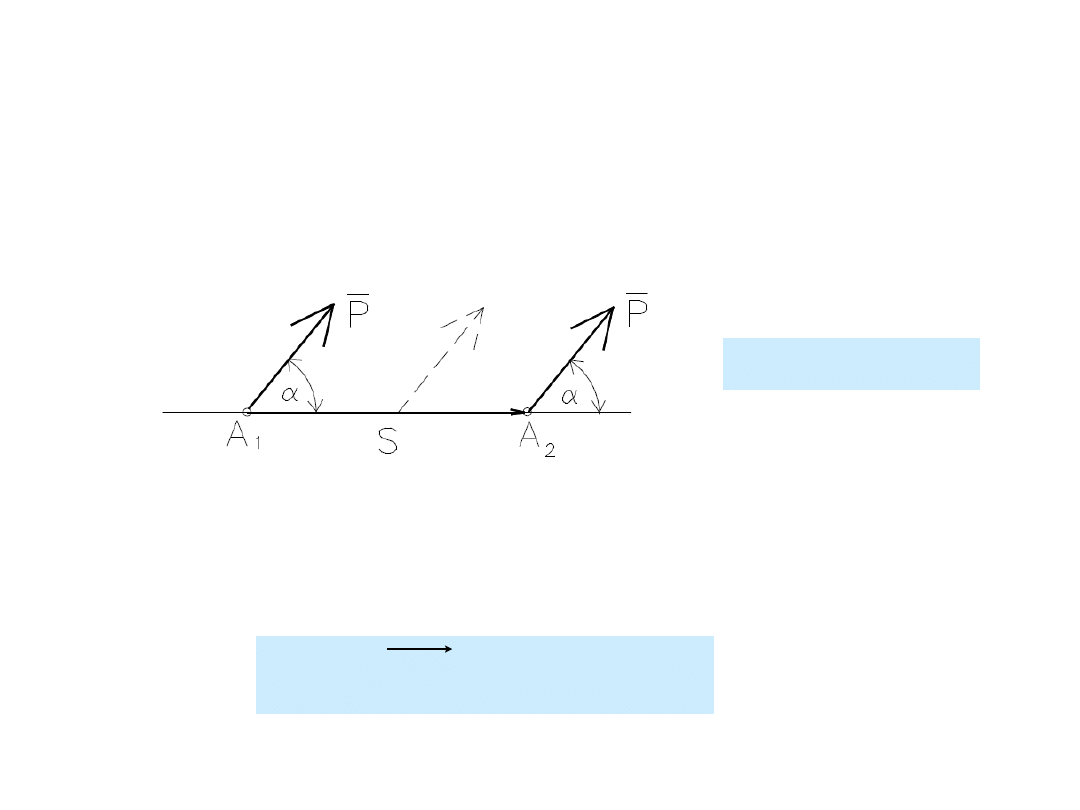
cos
Ps
L
Praca siły
Pracą siły stałej na prostoliniowym przesunięciu punktu
przyłożenia tej siły nazywa się iloczyn bezwzględnej wartości
przesunięcia i miary rzutu siły na kierunek przesunięcia.
cos
2
1
s
P
A
A
P
L
Wartość liczbowa pracy jest równa iloczynowi skalarnemu
wektora siły i wektora przesunięcia.
cos
P
s
L
103
z
y
x
P
P
P
P
,
,
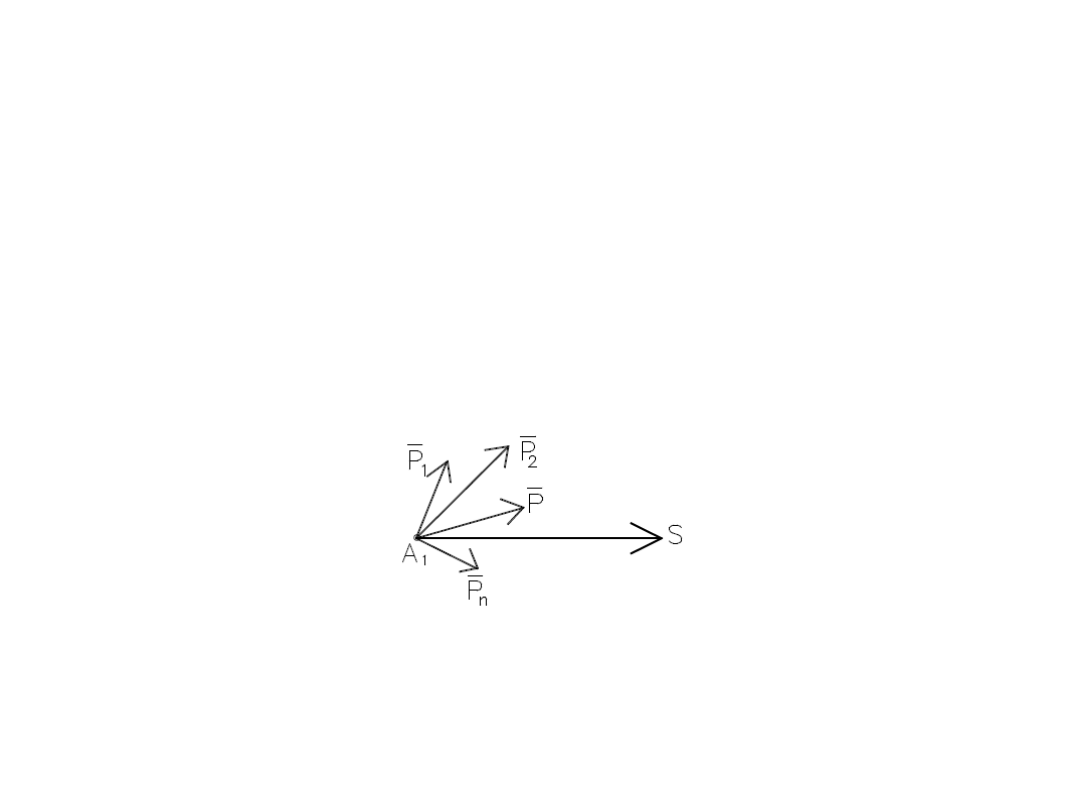
W układzie współrzędnych prostokątnych:
s
P
s
P
s
P
s
P
s
P
L
n
n
i
i
...
2
1
1
Praca wypadkowej sił przyłożonych do jednego punktu jest
równa sumie prac poszczególnych sił:
]
,
,
[
z
y
x
s
s
s
s
z
z
y
y
x
x
s
P
s
P
s
P
s
P
L

104
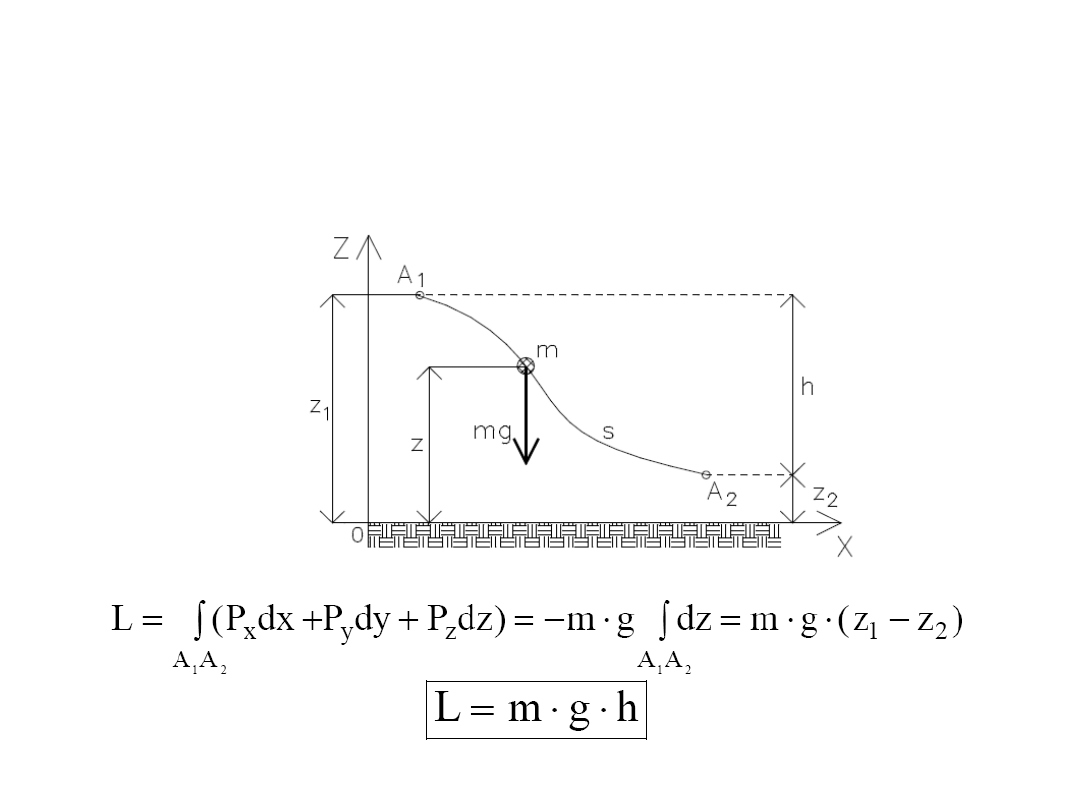
Jeśli punkt przyłożenia siły opisuje odcinek toru
krzywoliniowego, to:
Składowe P
x
, P
y
, P
z
mogą zależeć od czasu i każdej ze
współrzędnych położenia.
2
1
2
1
A
A
z
y
x
A
A
dz
P
dy
P
dx
P
r
d
P
L
Praca w ruchu obrotowym
Praca siły w ruchu obrotowym równa jest iloczynowi momentu
siły względem osi obrotu i kąta obrotu ciała.
l
M
L

105
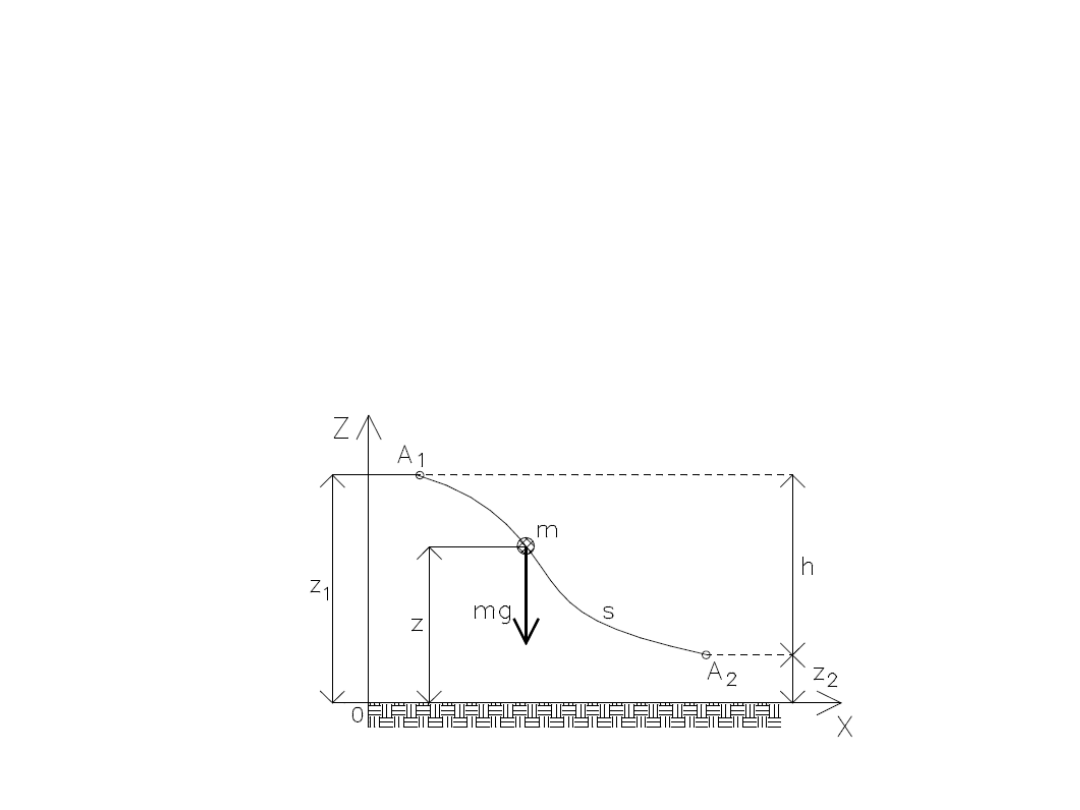
Siły zachowawcze
Praca wykonana nad punktem materialnym przez siły
zachowawcze nie zależy od kształtu toru a tylko od położenia
punktu początkowego i końcowego.
Praca wykonana przez te siły po dowolnej drodze zamkniętej
jest równa zeru.
Pole zachowawcze sił – przestrzeń, w której działają siły
zachowawcze.
Przykład siły zachowawczej – siła ciężkości.
Przykłady sił niezachowawczych – siła tarcia, siła oporu
aerodynamicznego.
106
Energia potencjalna
Praca wykonana przez siły ciężkości nie zależy od kształtu
toru a jedynie od różnicy wysokości nad umownym poziomem
odniesienia.
0
P
P
g
m
P
x
y
z
107
Energia potencjalna punktu materialnego jest to praca,
jaką może wykonać nad punktem materialnym siła ciężkości
w jednorodnym polu zachowawczym sił ciężkości.
mgh
z
z
mg
V
)
(
2
1
h
– różnica poziomów między punktem początkowym a
końcowym.
108
Energia mechaniczna
Energia mechaniczna
punktu materialnego jest sumą jego
energii kinetycznej i energii potencjalnej.
Zasada zachowania energii mechanicznej:
Podczas ruchu punktu materialnego w zachowawczym polu
sił, suma jego energii kinetycznej i potencjalnej, zwana
energią mechaniczną, jest wielkością stałą:
const
V
E
Równoważność pracy i energii kinetycznej:
Przyrost energii kinetycznej punktu materialnego w
skończonym przedziale czasu jest równy sumie prac, które
wykonały w tym czasie wszystkie siły zewnętrzne działające
na ten punkt:
L
E
E
1
2
109
Przykład 1: Punkt materialny o masie m porusza się w polu zachowawczym
sił ciężkości. Wyznaczyć prędkość tego punktu na wysokości z, jeśli jego
prędkość na wysokości z
0
wynosi v
0
.
Przykład 2: Wahadło matematyczne (punkt materialny zawieszony na nici)
wychylono z położenia równowagi o kąt
=
/2 i puszczono swobodnie.
Wyznaczyć prędkość liniową punktu oraz siłę naciągu nici w funkcji kąta
.
Przykład 3: Jednorodny krążek o promieniu R i masie m toczy się po
poziomej prostej bez poślizgu, z prędkością liniową środka masy równą v
0
.
Obliczyć energię kinetyczną krążka.
z
z
g
v
v
0
2
0
2
Odp.
cos
2
Odp.
gl
v
cos
3mg
S
2
0
4
3
Odp.
mv
E

110
Wytrzymałość materiałów
„Wytrzymałość” materiału – właściwość ciała stałego
polegająca na przeciwstawianiu się niszczącemu
działaniu sił zewnętrznych.
W materiale poddanym działaniu sił zewnętrznych
(obciążeń) powstają siły wewnętrzne, będące
wynikiem oddziaływania pomiędzy poszczególnymi
cząstkami ciała jednorodnego.

111
Wytrzymałość materiałów posługuje się modelem
ciała jednorodnego, izotropowego i idealnie
sprężystego.
Ciało jednorodne – ciało, w którym materia wypełnia
jego objętość w sposób ciągły.
Materiał izotropowy – materiał, którego właściwości są
takie same we wszystkich kierunkach.
Odkształcenia sprężyste – odkształcenia, które
ustępują po usunięciu obciążeń.
Uproszczenia i uogólnienia
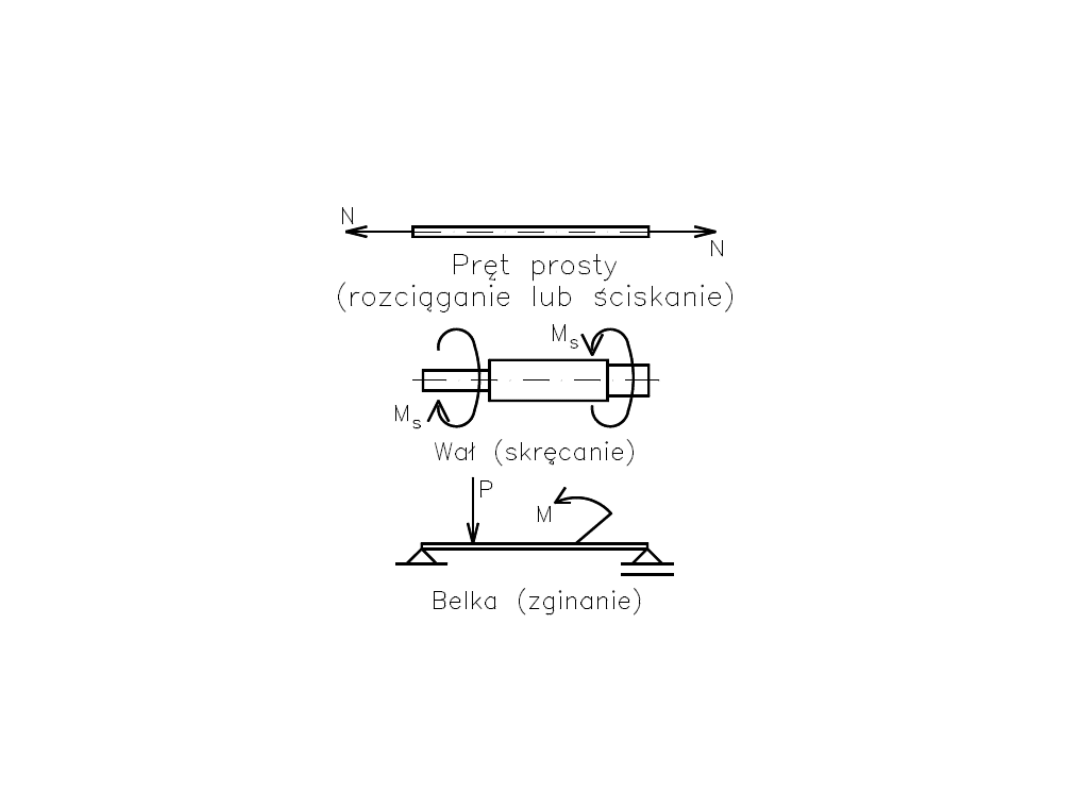
112
Modele nominalne
w wytrzymałości materiałów:
-
pręt
-
wał
- belka
113
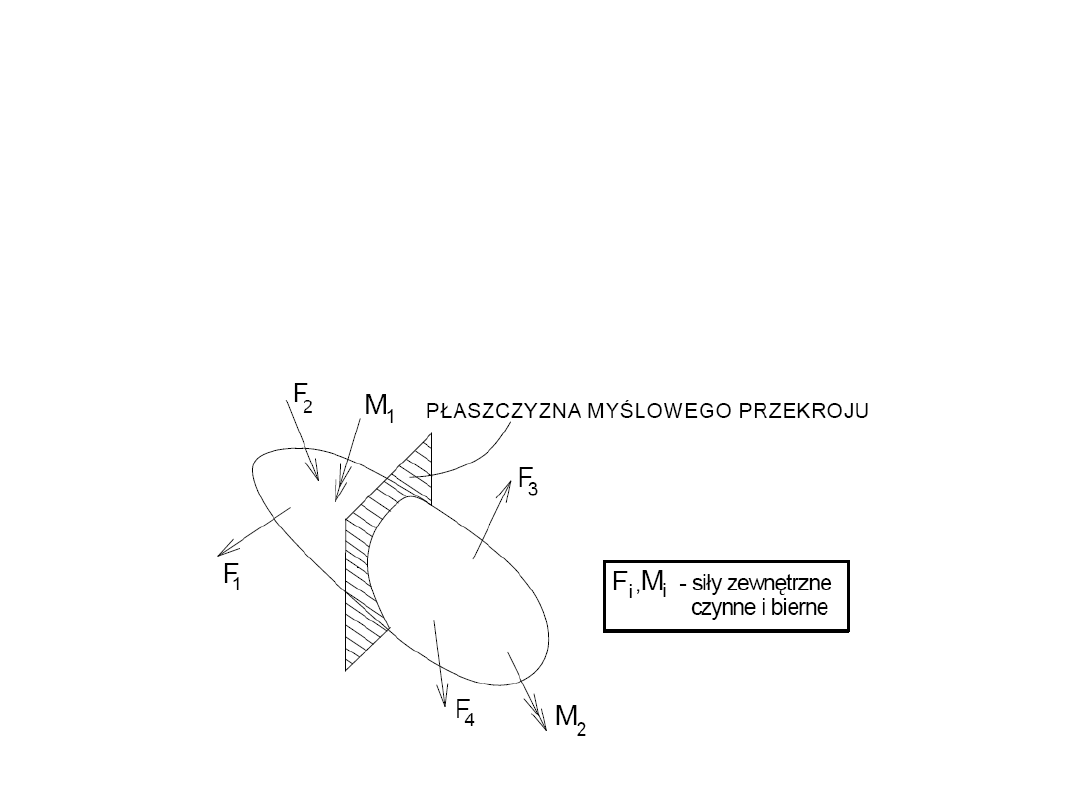
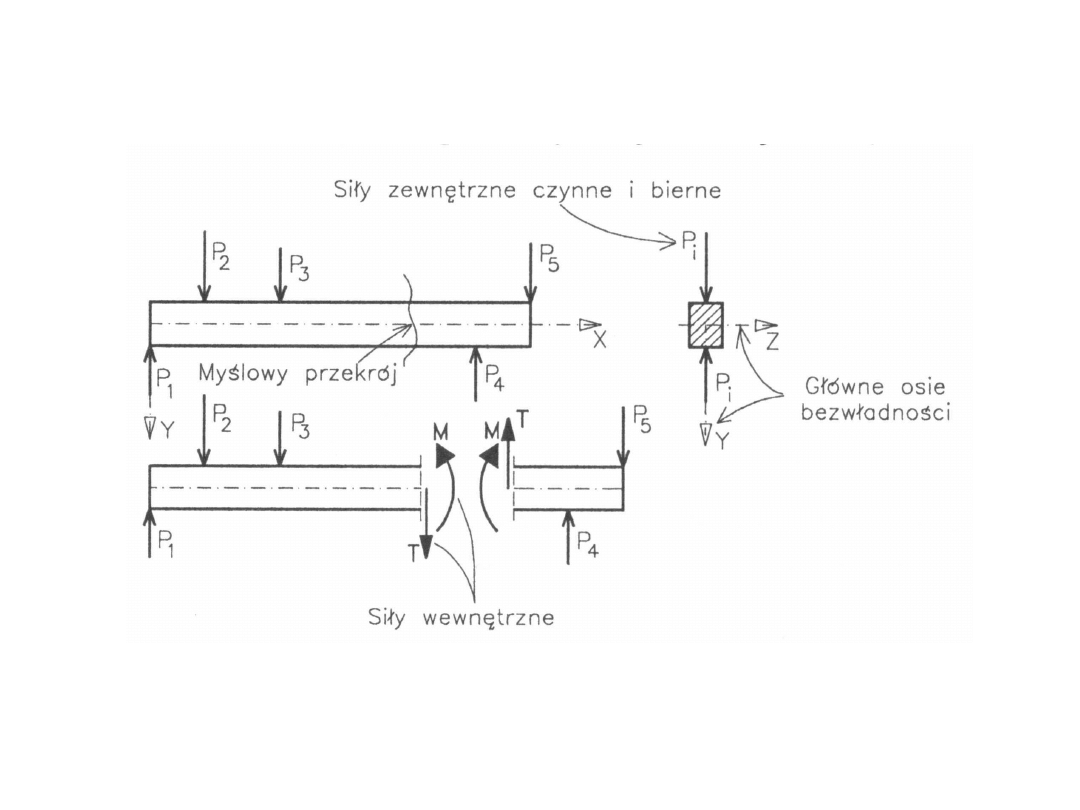
Dla ujawnienia sił wewnętrznych korzysta się z zasady
myślowych przekrojów.
Siły wewnętrzne są wynikiem oddziaływania jednej części
ciała oddzielonej myślowym przekrojem na drugą.
Obciążenia i siły wewnętrzne
114
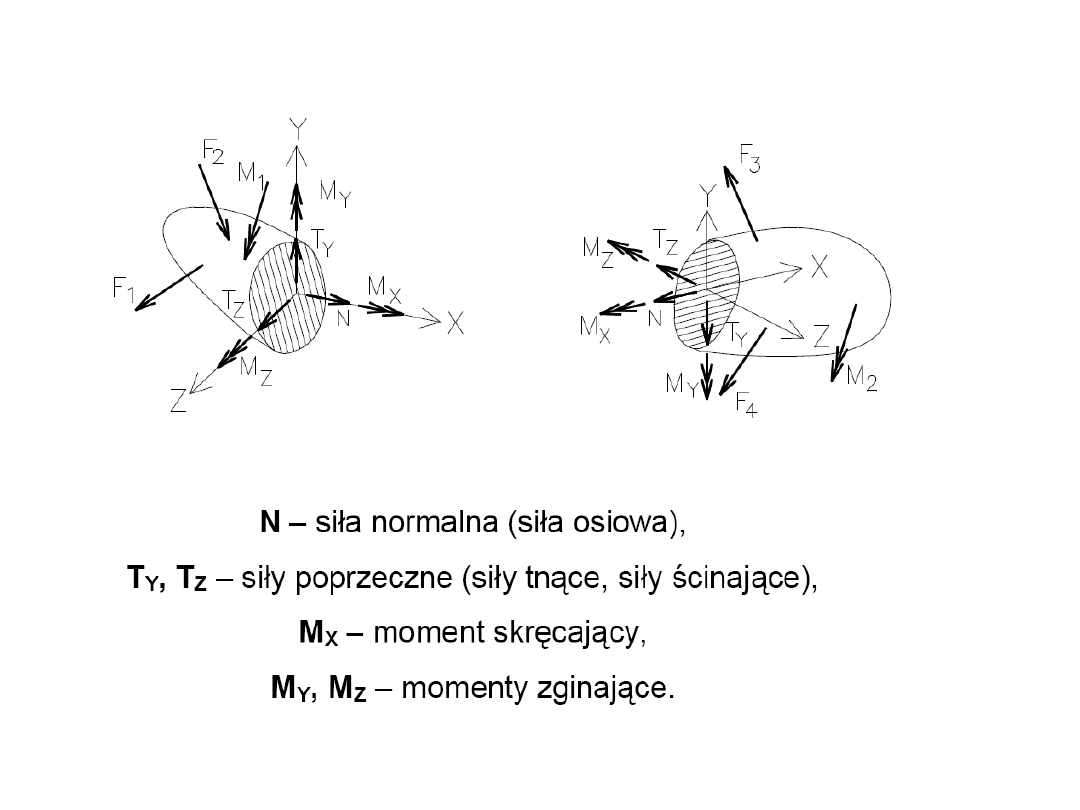
Siły wewnętrzne w myślowo podzielonym ciele
115
116
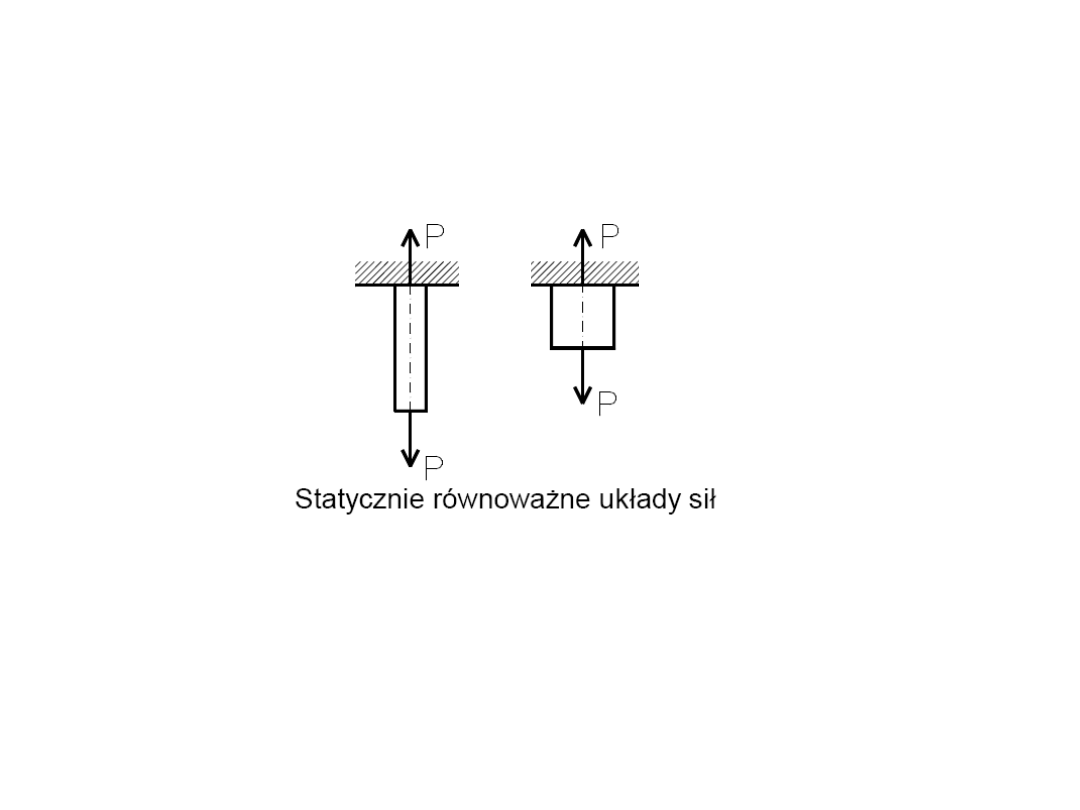
Układy sił równoważne z punktu widzenia statyki mogą się
charakteryzować różną wytrzymałością.
Do oceny wytrzymałości danej konstrukcji na zniszczenie
wprowadza się pojęcie naprężenia.
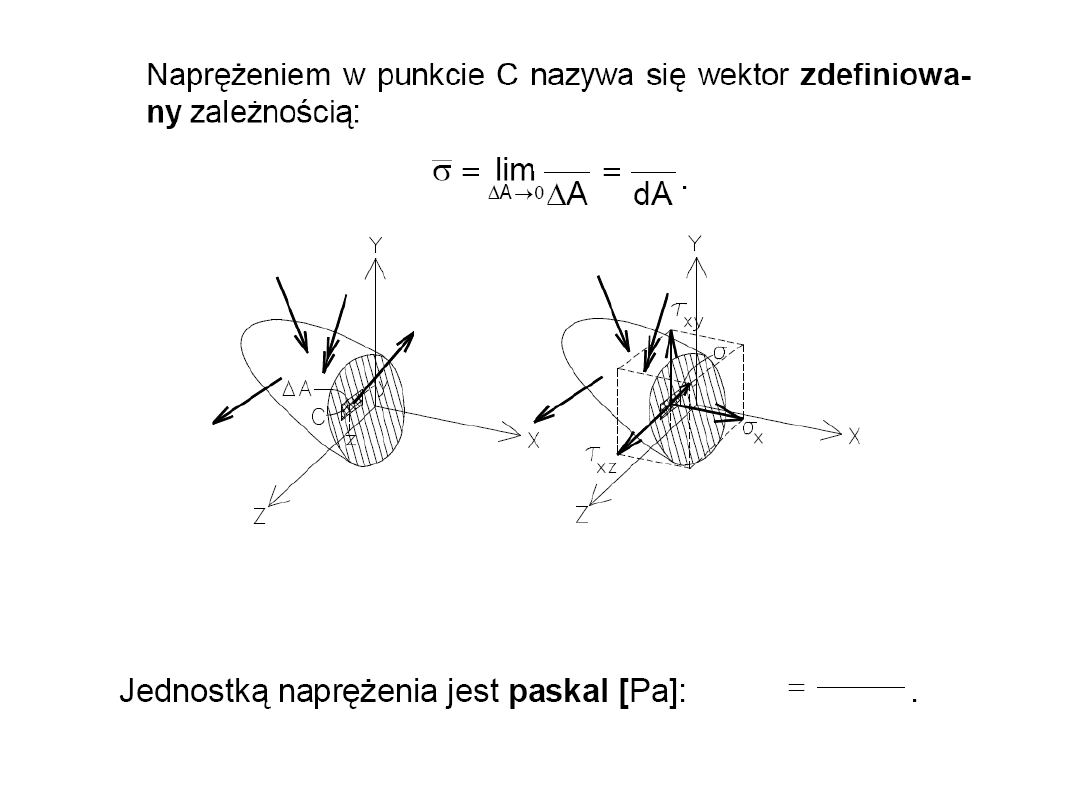
117
P
k
j
i
xz
xy
x
1 Pa
1 N
1 m
2
dP
P
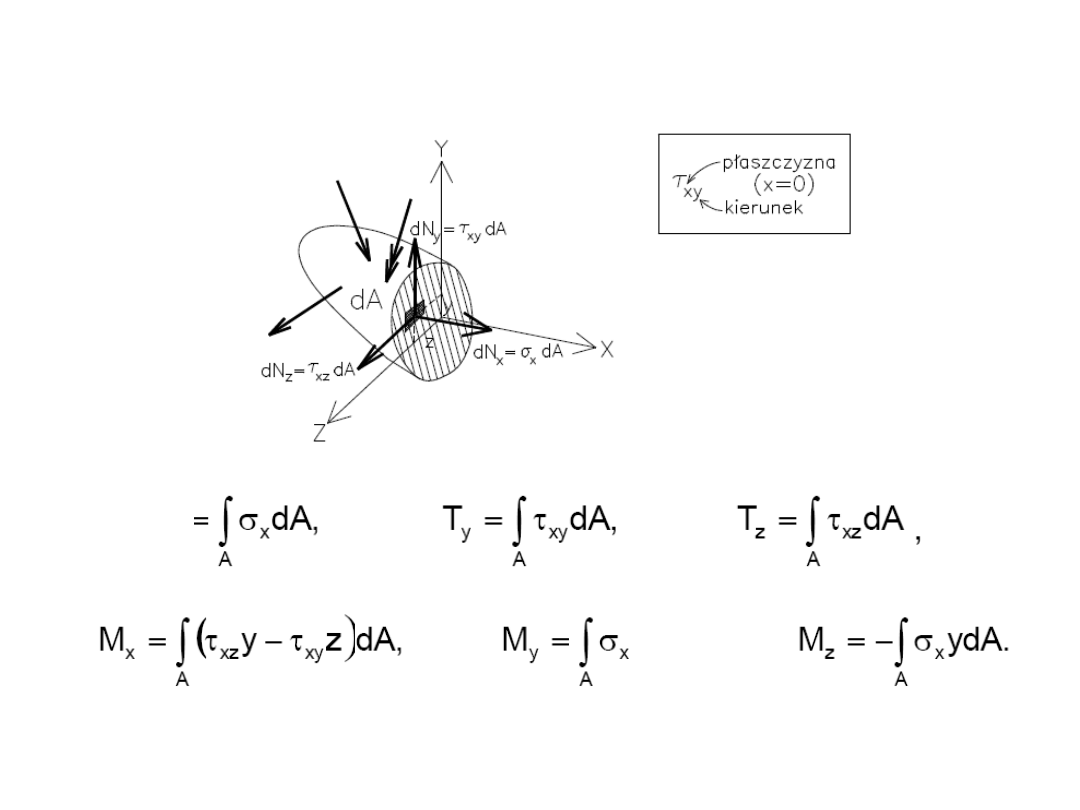
118
Związki między siłami wewnętrznymi i naprężeniami
zdA
N
119
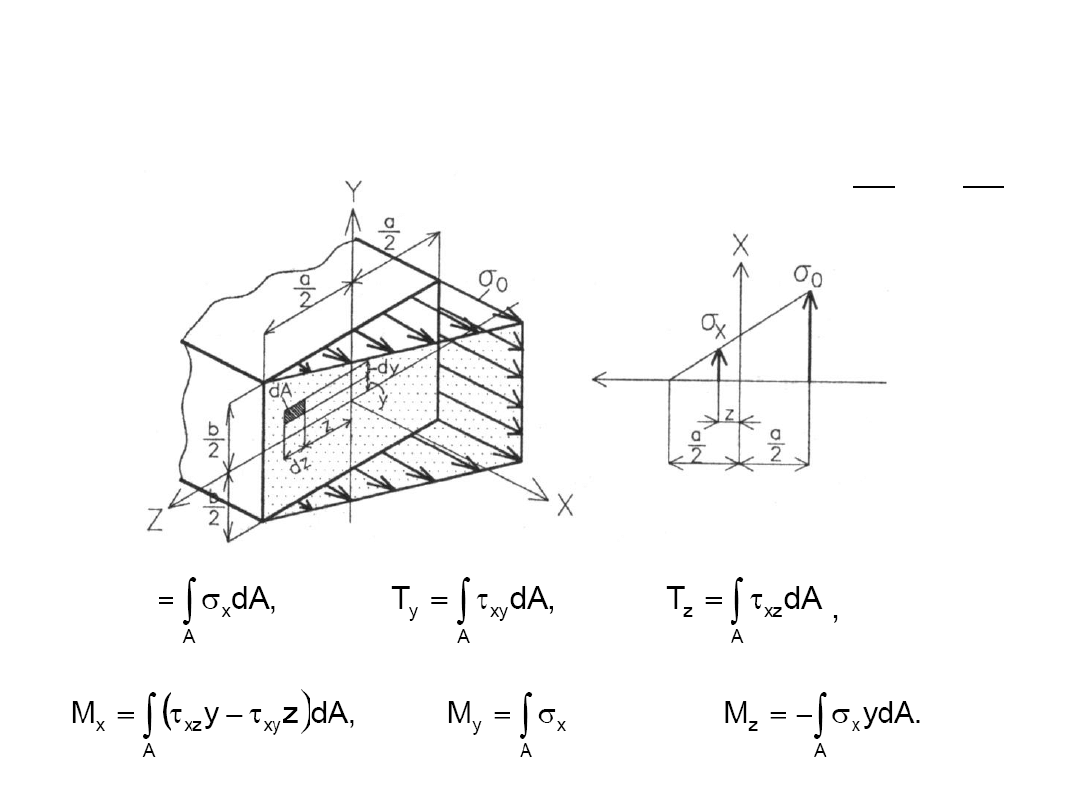
Przykład: Określić związki między siłami wewnętrznymi a naprężeniami,
jeśli naprężenia w przekroju prostokątnym rozłożone są jak na rysunku.
Dane: a, b,
0
.
0
xz
xy
a
z
x
2
1
2
0
zdA
N
120
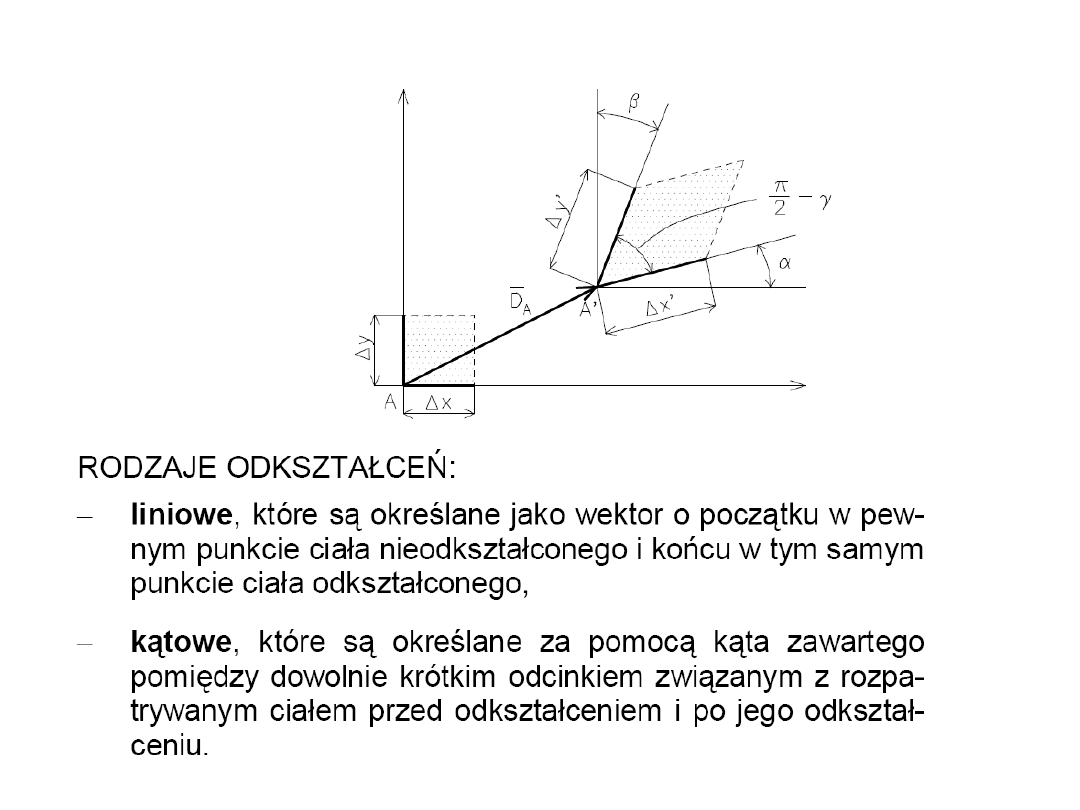
Odkształcenia i przemieszczenia
X
Y
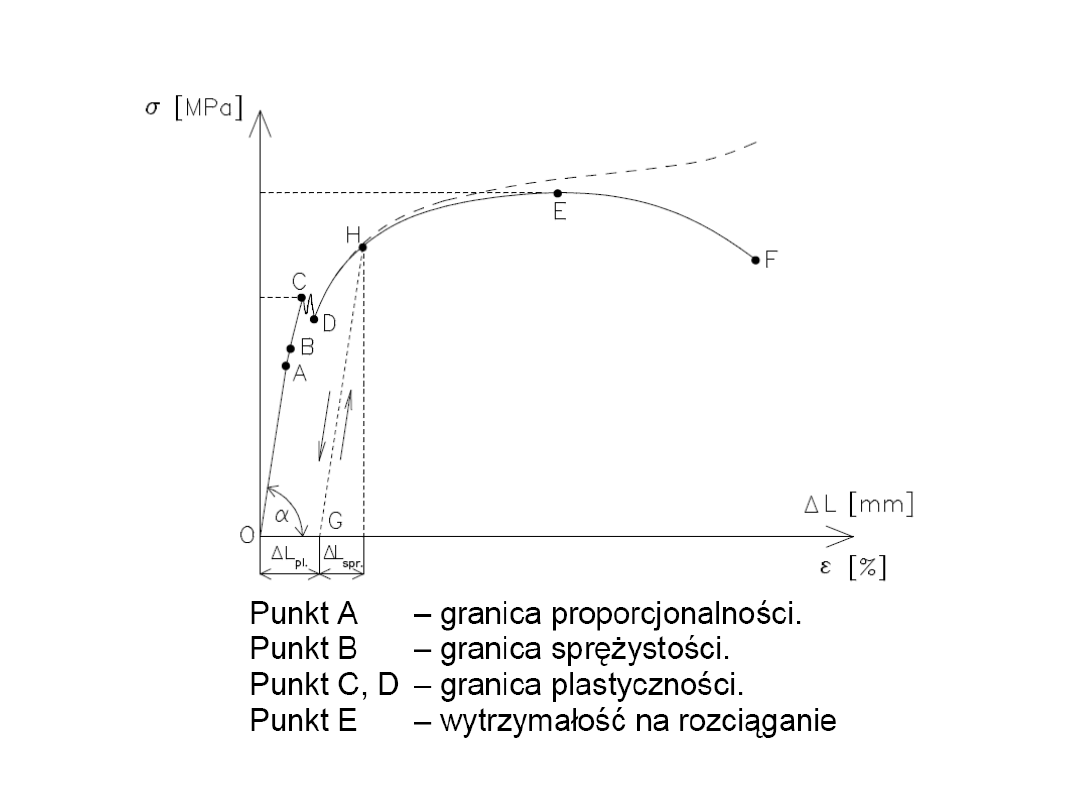
121
Wykres rozciągania próbki
(statyczna próba rozciągania)
P [kN]
P
m
P
e
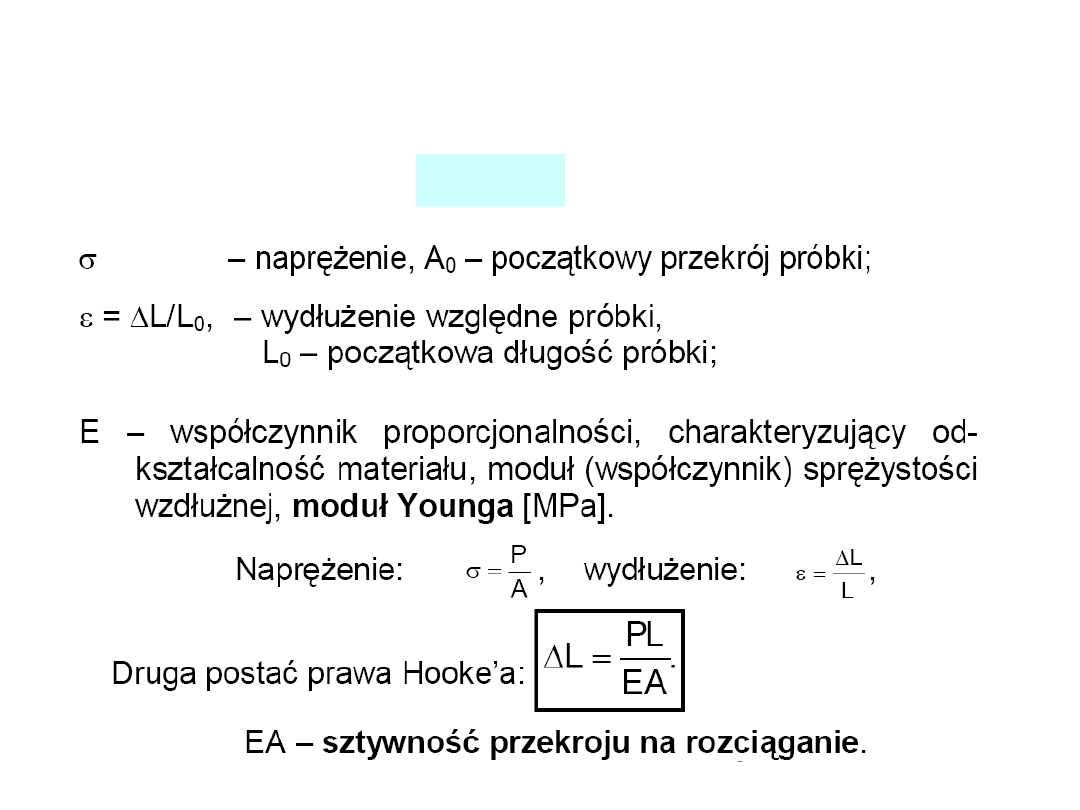
123
Dla naprężeń nie przekraczających granicy
proporcjonalności obowiązuje prawo Hooke’a
E
= P/A
0
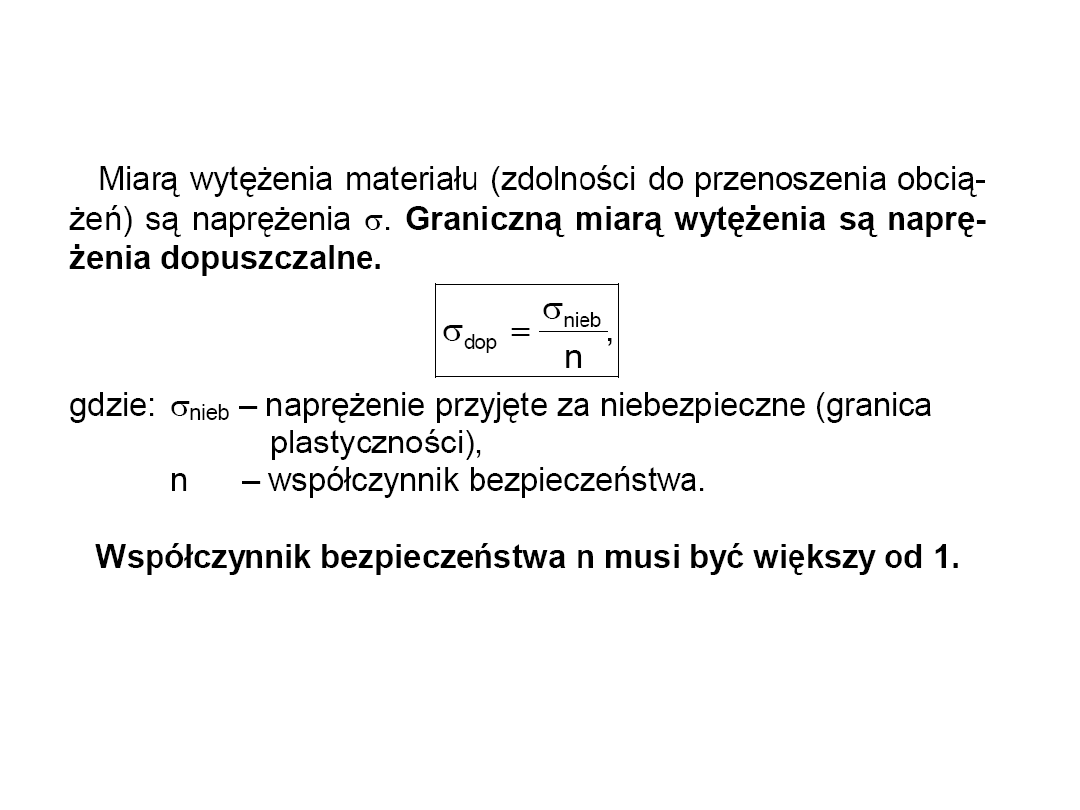
124
Naprężenia dopuszczalne
n = 1,5
2,5
Jeśli konstrukcja ma bezpośredni związek z
bezpieczeństwem ludzi, to n = 5
10
125
Warunek wytrzymałościowy
Warunek sztywności
Warunek sztywności jest wykorzystywany do określenia wymiarów
konstrukcji ze względu na dopuszczalne odkształcenia
dop
l
l
dop
max
126
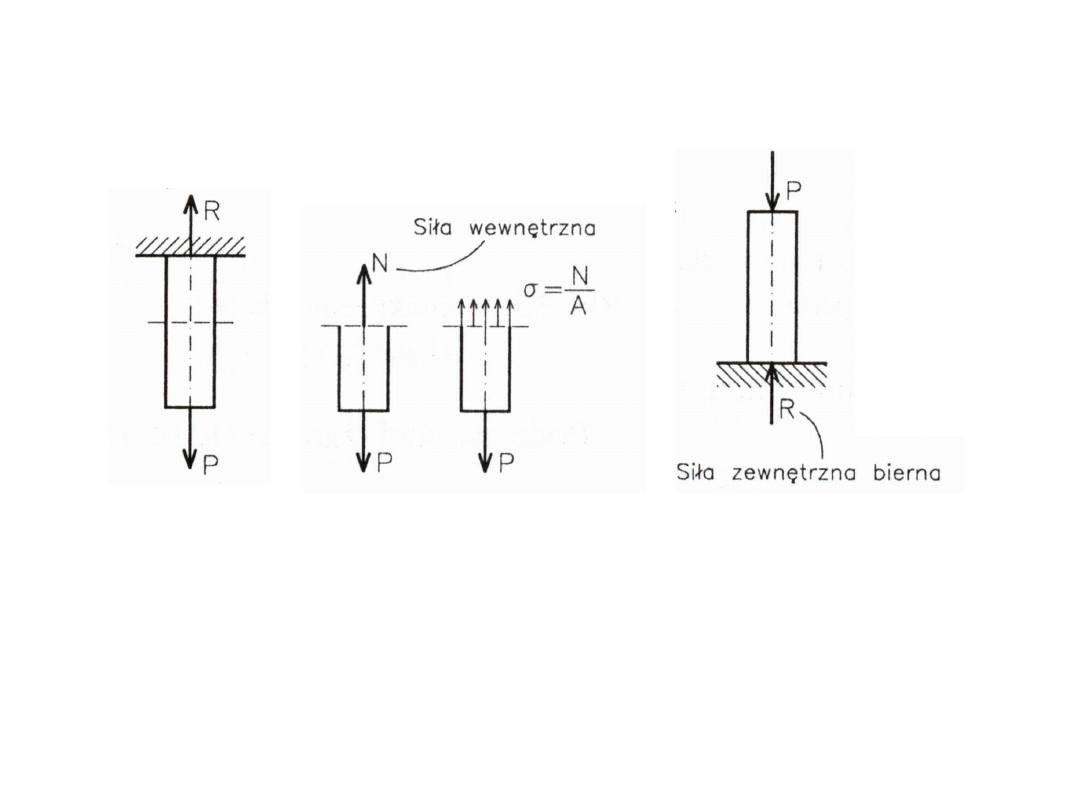
Siły zewnętrzne i wewnętrzne w prętach
Pręt rozciągany
Pręt ściskany
Siły zewnętrzne działają tylko wzdłuż osi pręta.
Siły rozciągające: znak „+”, siły ściskające: znak „-”
Suma sił zewnętrznych działających wzdłuż osi pręta
jest równa zeru.
127
Siły wewnętrzne wyznacza się metodą myślowych przekrojów.
Myślowych przekrojów dokonuje się w dowolnych miejscach
odcinków, których granicami są punkty:
-
przyłożenia obciążenia,
-
zmiany kształtu poprzecznego pręta.
P
3
P
2
P
1
A
3
A
2
d
d
c
c
b
b
a
a
d
c
b
a
R
0
3
2
1
R
P
P
P
x
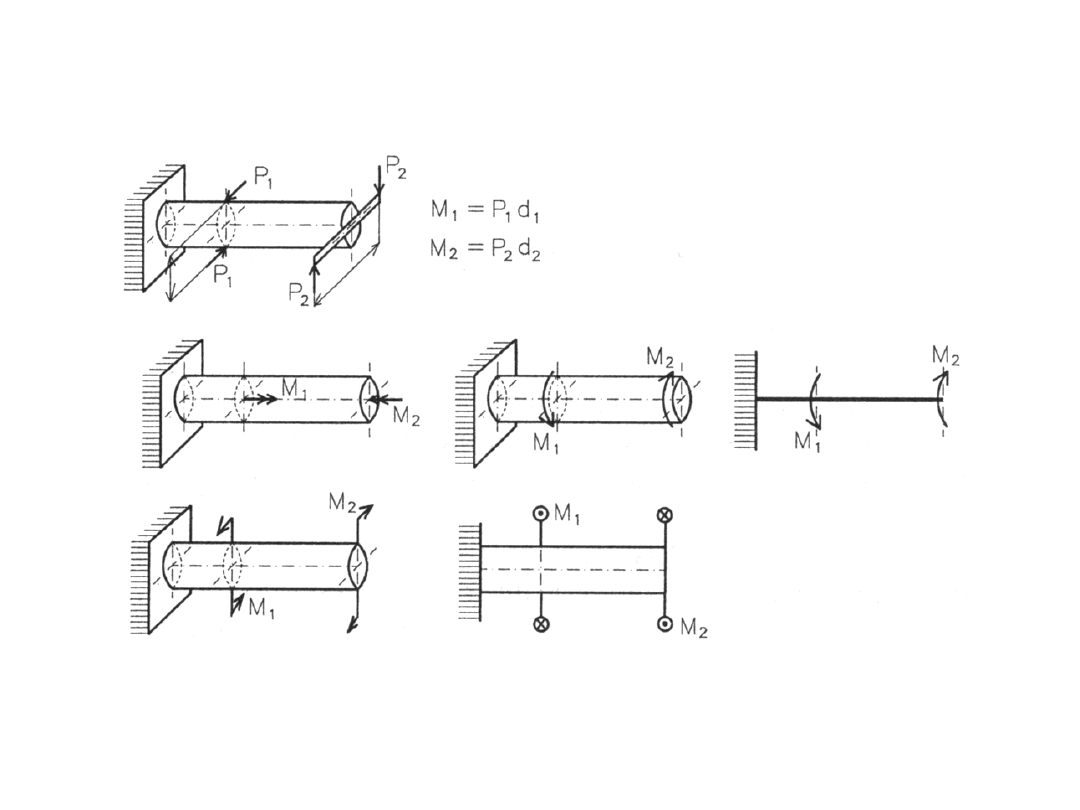
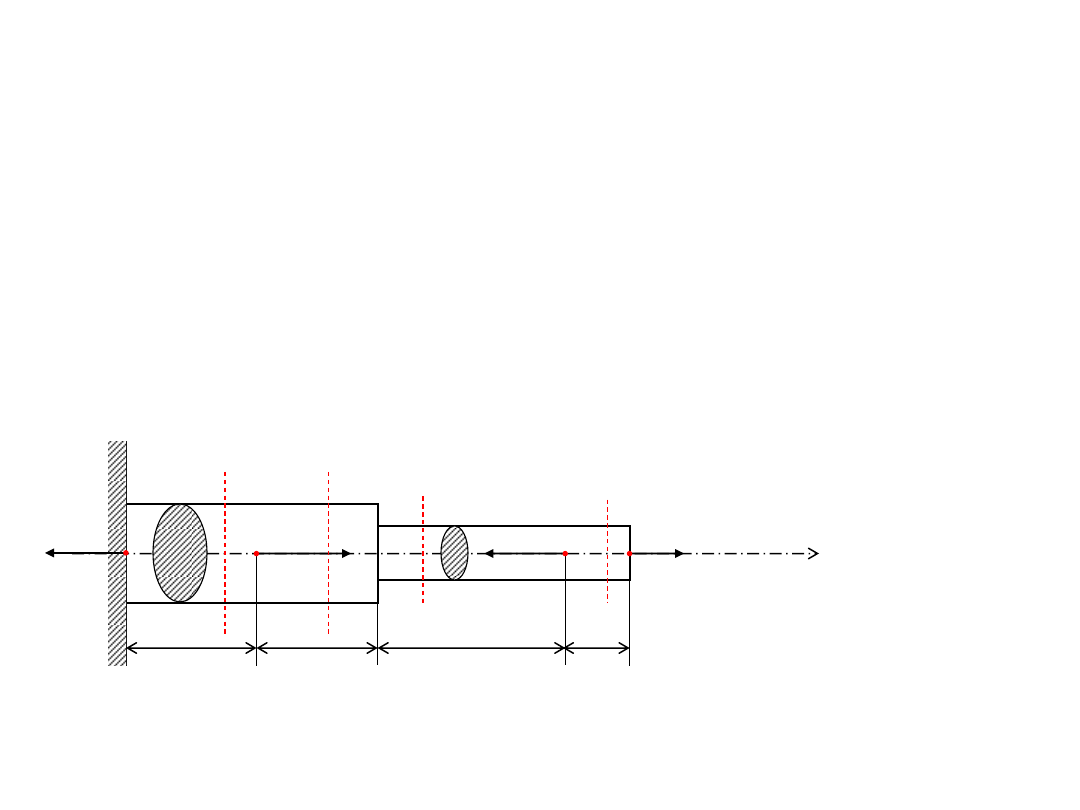
128
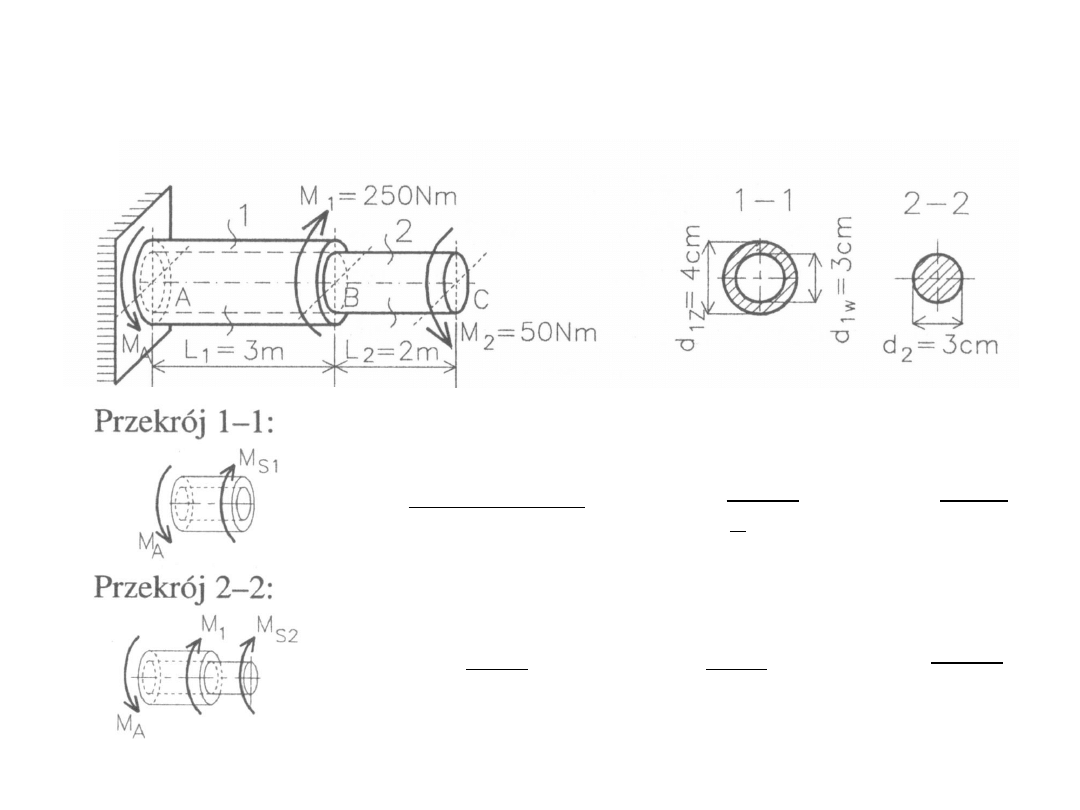
Skręcanie wałów o przekroju okrągłym
Sposoby zaznaczania momentów skręcających
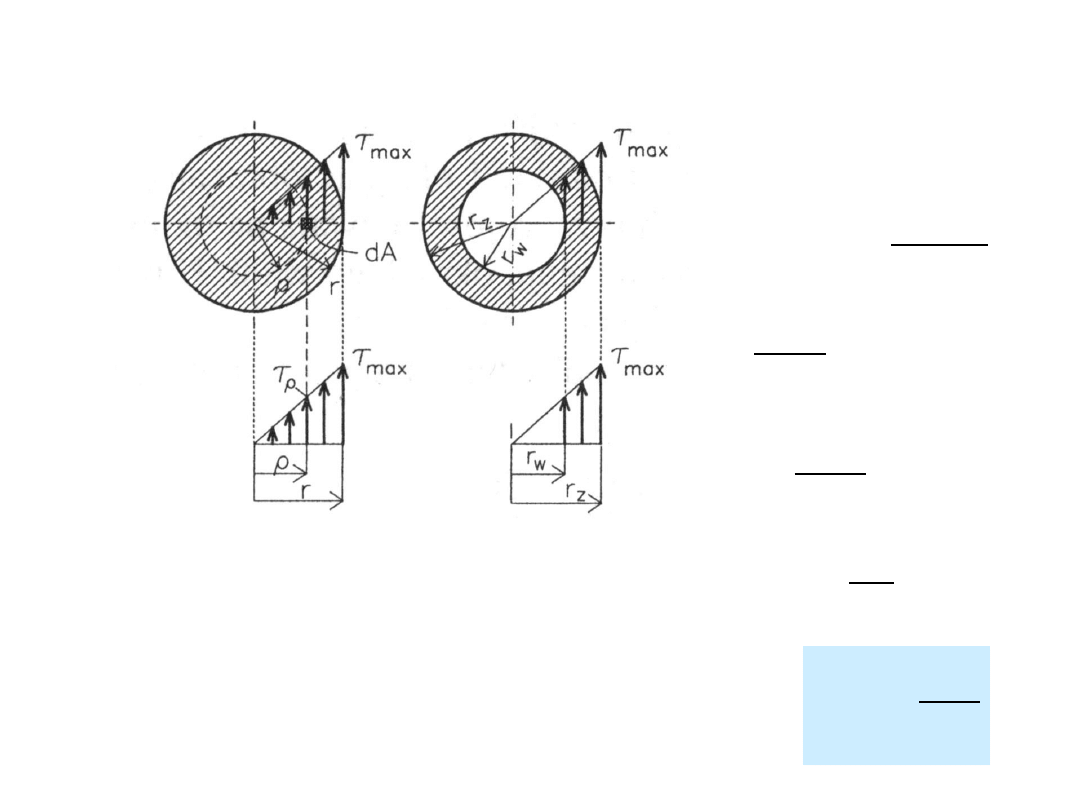
129
Rozkład naprężeń stycznych
wał pełny wał wydrążony
s
A
M
A
d
r
max
s
A
M
dA
r
2
max
J
0
– biegunowy moment bezwładności
W
0
– wskaźnik wytrzymałości przekroju na skręcanie
s
M
J
r
0
max
0
0
W
r
J
0
max
W
M
s
130
Dla pełnego wału okrągłego:
16
3
0
d
W
32
4
0
d
J
Dla wału wydrążonego:
z
d
J
W
2
1
0
0
32
4
4
0
w
z
d
d
J
Warunek wytrzymałościowy na skręcanie:
dop
dop
dop
s
W
M
5
,
0
,
0
max
Kąt skręcania wału o długości L:
0
GJ
L
M
s
G
– moduł odkształcenia postaciowego (moduł Kirchhoffa)
131
Przykład: Wyznaczyć momenty wewnętrzne i naprężenia styczne w
wale jak na rysunku.
32
4
1
4
1
01
w
z
d
d
J
z
d
J
W
1
2
1
01
01
32
4
2
02
d
J
16
3
2
02
d
W
01
1
W
M
S
AB
02
2
W
M
S
BC
132
Zginanie belek prostych
133
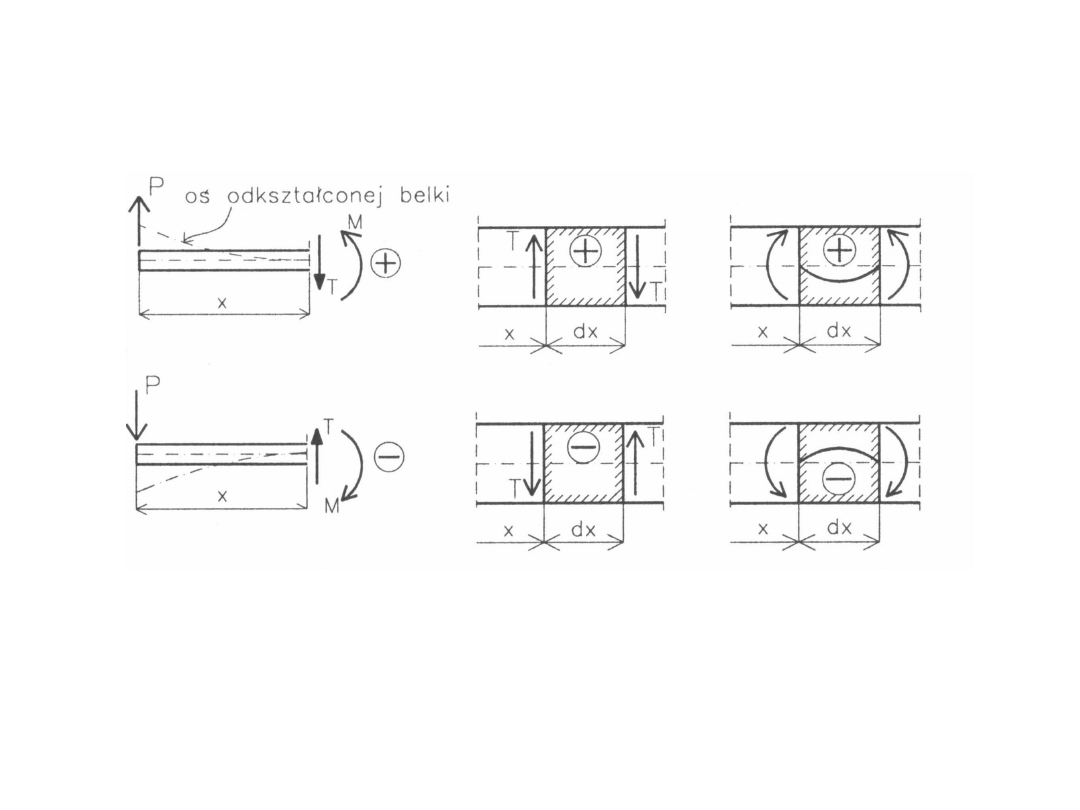
Umowne określenie znaków sił wewnętrznych
134
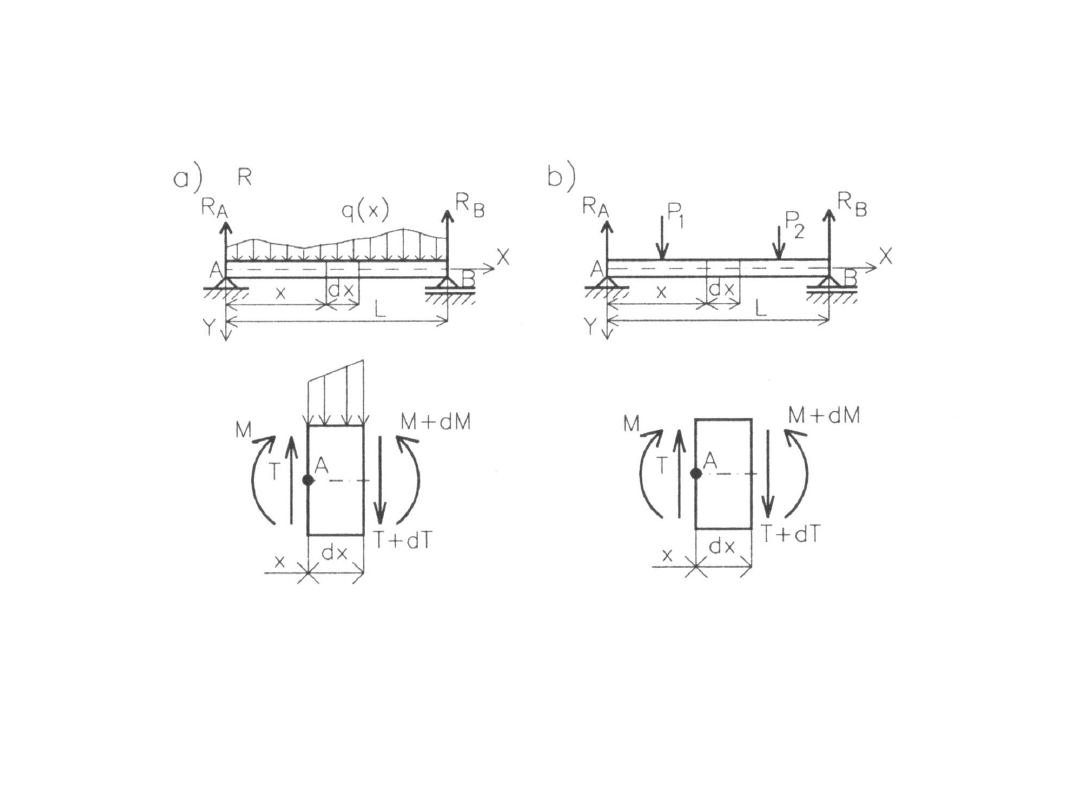
Zależności między obciążeniami a siłami wewnętrznymi
a)
belka obciążona siłami ciągłymi o intensywności q (x)
b)
belka obciążona siłami skupionymi
135
Sposoby podparcia belek
136
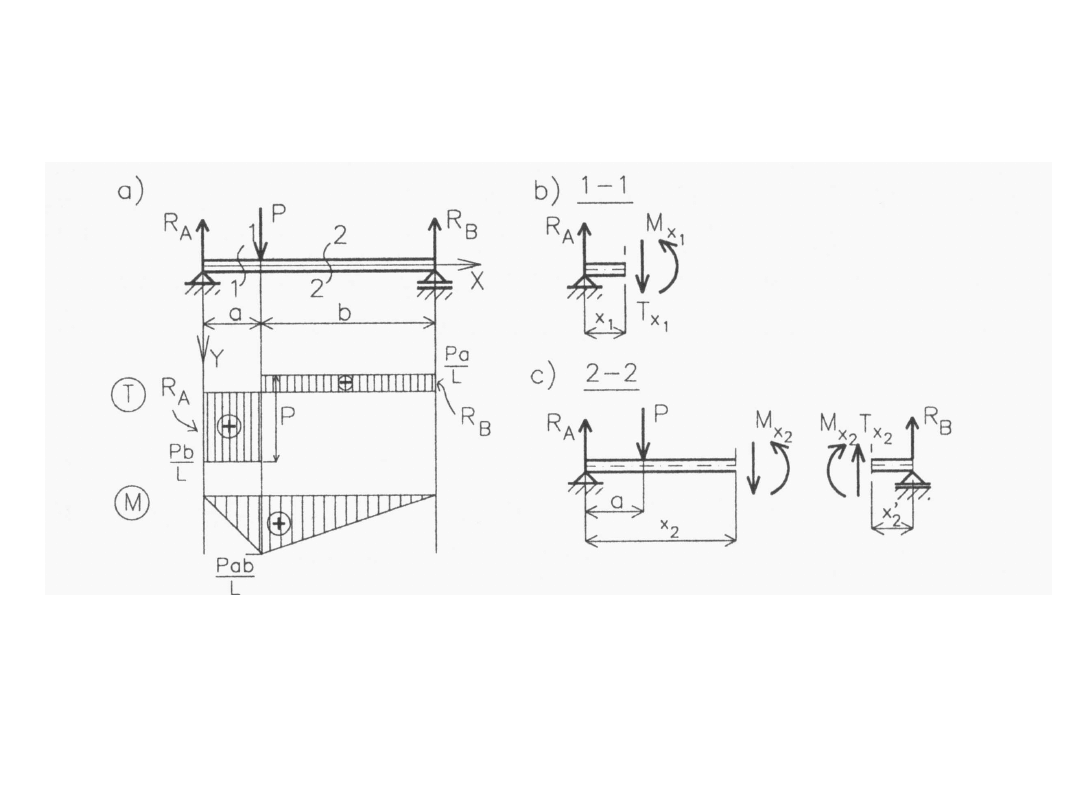
Przykład
137
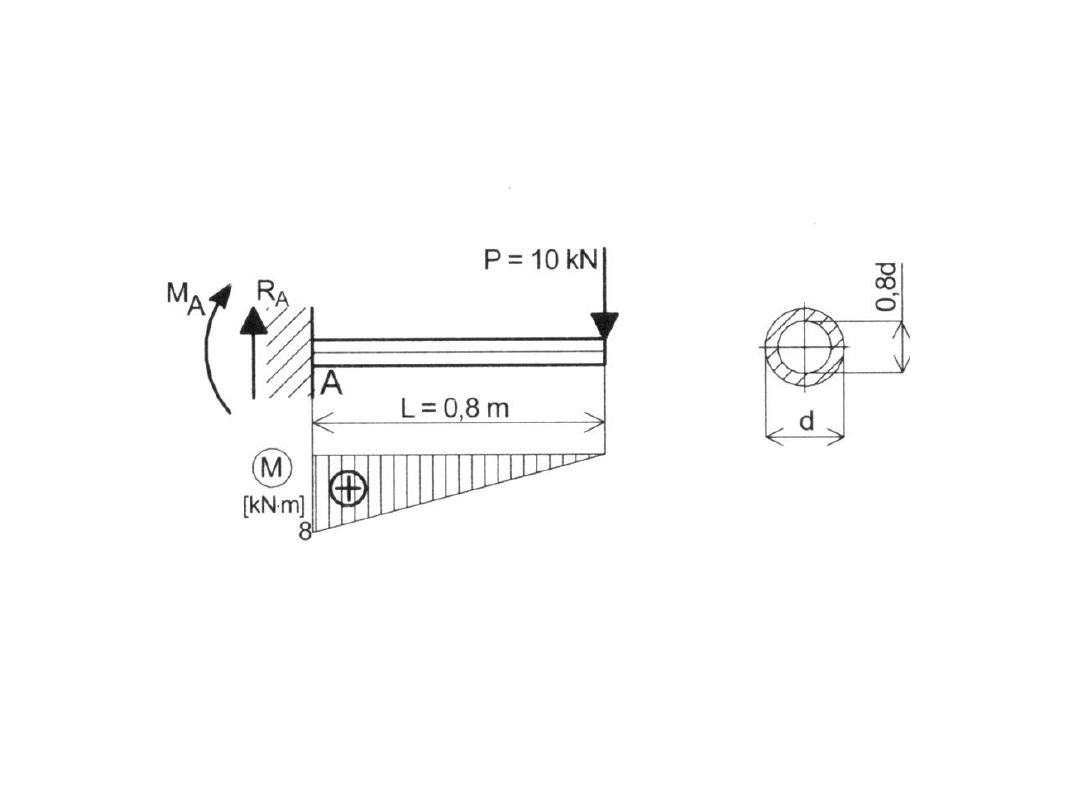
Zadanie
Wyszukiwarka
Podobne podstrony:
09 10 2012 Mechanika wykład
BMZ wykłady- fiszki z wykładów 2012-13, Psychologia, Psychologia I rok, semestr zimowy, Biologiczne
wyklad 2012 10 25 (Struktury systemów komputerowych)
Cieciuch Metodologia Wykład 2012 2013
m010p, STUDIA, SEMESTR I, Mechanika, Mechanika Wyklady, Mechanika net
Chemia ogolna wyklady 5 6 2012 Nieznany
Budownictwo opracowane pytania na egz z wykładów (2012)
PNOP wyklad 2012 student
Mechanika wykład II semestr
Chemia ogólna wykład 2 2012
Prokuratura Rp wykład 2012 ver1 1
ITM Wykład 2012 Rapid Prototyping Rapid Tooling
m014a, STUDIA, SEMESTR I, Mechanika, Mechanika Wyklady, Mechanika net
m002b, STUDIA, SEMESTR I, Mechanika, Mechanika Wyklady, Mechanika net
Rachunkowośc obrotu towarowego - materiały do wykladu 2012, Uniwersytet Ekonomiczny w Katowicach, Fi
Ryby wykłady 2012, weterynaria, 4 rok, choroby ryb
więcej podobnych podstron