1. Pytania do tezy: Biomechanika nauk
ą o strukturze ruchu człowieka
1.1(1)Zdefiniuj poj
ęcie biomechaniki i jego (pojęcia) genezę
Ogólne:
Słowo BIOMECHANIKA pochodzi od grec. BIOS- życie, mechate - narzędzie, mechanizm.
Dosłownie jest to, więc nauka o żywych mechanizmach, albo o mechanice istot żywych.
Biomechanika w systemie nauk mo
że być uważana za część biofizyki podobnie jak
mechanika jest cz
ęścią fizyki.
Definicje
BIOMECHANIKA to nauka badająca właściwości mechaniczne tkanek i narządów oraz
ruch mechaniczny żywych organizmów – jego przyczyny i skutki. Nauka o ruchu oraz
związanych z nim obciążeniach i ich skutkach, mechanizmach.
Jest interdyscyplinarną nauką zajmującą się badaniem struktury ruchu org. żywych – w
szczególności człowieka przy pomocy metod stosowanych w mechanice.
Jest nauką opierającą swoje podstawy na mechanice z jednej, biologii i medycynie z
drugiej strony.
2.
Pytania do tezy: Ogólna charakterystyka metod badawczych stosowanych w
biomechanice
Akcelerometria (ALM) – to metoda badania przyspieszeń liniowych i kątowych.
Spidometria (SDM) – to metoda badania prędkości liniowych i kątowych.
SDM: mechaniczno-elektryczna (klasyczna), fotokinemetryczna, fotodioda, radarowa (efekt
Dopplera), laserowa
Elektrogoniometria (EGM) – to metoda badania przyspieszeń kątowych, głównie w
stawach kończyn i ich pochodnych.
Dynamometria (DNM) – metoda pomiaru (badania) sił generowanych lub
transformowanych przez obiekty; dzieli się na mechaniczną, piezoelektryczna (efekt
piezoelektryczny polega na pojawianiu się jonowych ładunków elektrycznych na
odpowiednich ściankach kryształu w wyniku jego deformacji sprężystej wywołanej siłami
zewnętrznymi), tensometryczną (efekt tensooporowy polega na zmianie rezystancji metali
pod wpływem przyłożonych naprężeń R=f(F)).
Fotokinemetria – metoda rejestracji ruchu człowieka przy pomocy kamer
fotograficznych i filmowych (cyfrowych i analogowych) i systemów optoelektronicznych,
jednocześnie metoda analizy ruchu na podstawie jego zapisu techniką światłoczułą i
elektroniczną (fotogrametria analityczna)
Elektromiografia (EMG) – metoda badania potencjałów bioelektrycznych mięśni
szkieletowych (czynności bioelektrycznej mięśni).
EMG - Elektromiografia to rejestracja czynności elektrycznej mięśni. Jest jednym z
podstawowych badań w rozpoznawaniu chorób mięśni i nerwów obwodowych. sEMG
(powierzchniowe EMG) - do zbierania informacji o czynności elektrycznej mięśni
wykorzystuje się powierzchniowe elektrody naklejane na skórę. sEMG w rehabilitacji,
wykorzystuje się w celu podniesienia efektywności wykonywanych ćwiczeń, mających na
celu zwiększenie lub zmniejszenie napięcia mięśni - metoda biofeedback.
EMG igłowa: polega na wprowadzeniu (wkłuciu) do mięśni cienkiej małej elektrody (igły) i
zapisywaniu bioprądów tych mięśni w spoczynku oraz podczas różnie stopniowanego
wysiłku. Średnica wierzchołka mikroelektrody powinna być znacznie mniejsza od wymiarów
komórki badanej.
Elektrostymulacja (funkcjonalna, ES, FES) – metoda badania charakterystycznych tkanek i
narządów (mięśni) pod wpływem pobudzenia z generatora zewnętrznego (stymulatora
elektrycznego).
Modelowanie (MDL) – metoda badań polegająca na zastąpieniu realnego układu
(złożonego) poprzez układ prostszy (model) odzwierciedlający właściwości (strukturę) i
funkcję badanego układu realnego.
2.2(4) Scharakteryzuj (ogólnie) zastosowania tych metod w biomechanice- kinezjologii-
fizjoterapii [w pytaniu szczegółowym mo
żna oczekiwać, że wskazane zostaną 2-3 metody
do charakterystyki]
akcelerometria – badania biomechaniki chodu; w sporcie najczęściej stosuje się
akcelerometrię na różnego rodzaju urządzeniach i sprzęcie
dynamometria - biomechanika medyczna, ergonomiczna, sport (tworzenie odpowiedniego
obuwia dla sportowców); generalnie szeroko stosowana w róznych dziedzinach nauki i
techniki np. badanie sił występujących w zgryzie, w kręgosłupie lędźwiowym (w zależności
od pozycji przodo lub tyłozgięcia tułowia podczas siadu)
elektrogoniometria (goniometria) – metoda ta jest przydatna w badaniach
biomechanicznych-szczególnie w biomechanice rehabilitacyjnej oraz w biomechanice sporu,
np. badanie geometrii ruchu (techniki) w stawach kolanowych, skokowych i łokciowych w
trakcie pływania różnymi stylami w ruchach lokomocyjnych; w technice startu niskiego, w
ć
wiczeniach akrobatycznych oraz w rzytach piłką baseballową
modelowanie - ?
spidometria – wykorzystywana w analizie techniki pływania. Metoda ta połączona z
fotograficzną pozwoliła na podział struktury ruchu pływaka na cykle i fazy i rozpatrzenie
chwilowych wartości prędkości w cyklu pływackim.. Pomiary prędkości sprinterów.
elektrostymulacja – zastosowanie w medycynie fizykalnej, przykładowe zastosowanie w
leczeniu schorzenia tzw. stopy opadającej .Umożliwia wzmocnienie mięśni, wywołując ich
skurcz; mogą mieć działanie przeciwbólowe, jak również rozkurczowo-rozluźniające w
przypadkach np. nadmiernych skurczów pęcherza (leczenie w nieotrzymaniu moczu).
elektromiografia – np. diagnostyka mięśni porażonych.,elektromiografia powierzchniowa (s-
EMG) w testach wysiłkowych; obrażenia sportowe; Ortopedyczna terapia manualna; doping
w sporcie; ergogeniki i suplementy.
fotokinemetria – identyfikacja techniki ruchu w przestrzeni np. badanie chodu, diagnostyka
chodu patologicznego, badanie techniki skoków gimnastycznych

BIOMASZYNA- model strukturalny15 segmentowy model budowy ciała człowieka wg H.P.
Hanavan`a
4. Pytania do tezy: Parametry funkcjonalne aktonów mi
ęśniowych
4.1 (10) Scharakteryzuj poj
ęcia: akton mięśniowy (Am), klasa aktonu (Ka), funkcja
aktonu (Fa), anatgonistyczno
ść aktonu (Aa)
Akton mi
ęśniowy
- jest to mięsień, jego część lub głowa, których włókna mięśniowe mają jednakowy lub
zbliżony kierunek przebiegu względem osi obrotu w stawach, ponad którymi dany akton
przebiega-> włókna mięśniowe aktonu spełniają jednakowe funkcje
Klasa aktonu
- jest to liczba równa liczbie stawów, w których akton może przejawić swoje funkcje
Np. akton mięśniowy o klasie 1 przebiega ponad jednym stawem,o klasie 3- ponad trzema
stawami
Funkcja aktonu
- dodatnie i ujemne składowe momentów sił, które akton może rozwijać względem osi obrotu
stawów, ponad którymi przebiega, funkcje aktonu określamy przez wyznaczanie składowych
momentów ich sił w płaszczyznach strzałkowej, czołowej i poprzecznej (jeśli ruchy w
płaszczyźnie strzałkowej nazwiemy zginaniem i prostowaniem, to składowe momentów sił w
tej płaszczyźnie wywołują funkcje zginania i prostowania)
Antagonistyczno
ść aktonu
- antagonistycznością aktonu nazywamy funkcję przeciwstawną w jednym stawie, która może
być rozwijana lub nie, w zależności od zmiany znaku ramienia siły danego aktonu
-Gradient siły – wielkość, która charakteryzuje dynamikę narostu siły (momentu siły) podczas
badania siły w kwasi – statyce ( F = max, M = max, t = min)
•
tj. nachylenie krzywej siły względem osi czasu, który to parametr wyraża średnia
prędkość narastania siły
•
oznacza stosunek przyrostu siły między punktami Fa i Fs do czasu (tb – ta)
-Narost siły – siła rozwijana przez mięśnie wzrasta stopniowo od najmniejszych wartości do
swojego max;
do osiągnięcia przez mięsień siły max niezbędny jest pewien czas – CZAS
NARASTANIA SIŁY i warunkach statyki zależy od:
•
rodzaju mięśnia
•
temperatury mięśnia
•
częstotliwości impulsów pobudzających
•
zmęczenia
w warunkach dynamiki czas ten zależy od przyspieszenia ciała i jego części
oraz od sztywności i masy przyrządów, na które działa człowiek
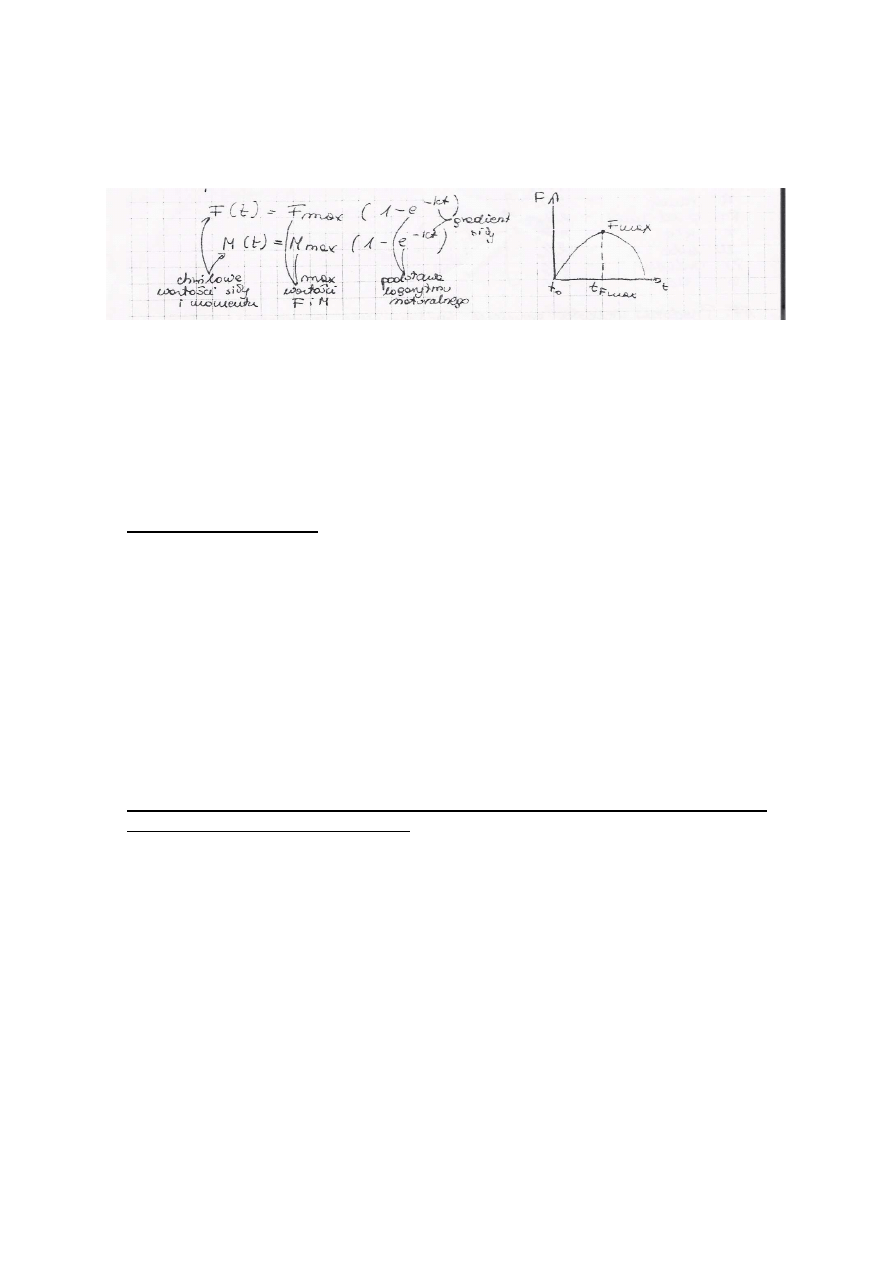
równania wykładnicze opisujące dynamikę narostu siły mięśni w przedziale od
Fo do Fmax
indeksy narostu siły – stosunek Fmax do czasu, w jakim został on rozwinięty
IF = Fmax / tFmax
7.Pytania do tezy : Biomechanika mi
ęśni
7.1(21) zdefiniuj poj
ęcia:
*SIŁA MIĘŚNIOWA – mięsień rozwija taką samą siłę w przyczepie bliższym i dalszym.
Siła ta ma taką samą wartość i
kierunek, a przeciwny zwrot w punktach przyczepu. (Rys.1)
•SIŁA BEZWZGLĘDNA - to siła przypadająca na 1cm2 przekroju fizjologicznego
mięśnia; wyznaczona także max.
Ciężarem podniesionym przez pojedynczy mięsień lub grupę mięśni.
•SIŁA WZGLĘDNA – jest to stosunek siły mięśniowej bezwzględnej do masy mięśni.
22.Scharakteryzuj poj
ęcie jednostka ruchowa (motoryczna),zasada „wszystko albo
nic”,struktur
ę włókien mięśniowych.
*JEDNOSTKA RUCHOWA (MOTORYCZNA)-
• w skład jednostki motorycznej wchodzą: motoneuron alfa, jego wypustka osiowa
(akson), i wszystkie włókna mięśniowe, które są unerwione ruchowo przez dany neuron
ruchowy. W obrębie jednostki motorycznej wszystkie włókna mięśniowe kurczą się
wspólnie, ponieważ impuls nerwowy dochodzi do nich równocześnie. Jest to możliwe
dzięki temu, że koniec aksonu rozgałęzia się, tworząc synapsy nerwowo-mięśniowe z
wieloma włóknami mięśniowymi.
Wielkość jednostki motorycznej w różnych mięśniach nie jest jednakowa.
Przyjmuje się, że w dużych mięśniach szkieletowych człowieka na jednostkę motoryczną
przypada od 400 do 500 włókien np. mięśnie kończyn dolnych .Małe mięśnie, spełniające
bardzo subtelne funkcje, jak np. .mięśnie poruszające gałkę oczną, mają jednostki ruchowe
zawierające mniej niż 10 włókien mięśniowych
*ZASADA „WSZYSTKO ALBO NIC” - komórka mięśniowa odpowiada na bodziec zgodnie
z prawem „wszystko albo nic”, to znaczy pod wpływem każdego bodźca o intensywności
progowej lub większej od progowej reaguje maksymalnie, nie odpowiada zaś na bodźce
podprogowe.
23.Przekrój poprzeczny(fizjologiczny mi
ęśnia),długość mięśnia,kąta działania siły
mi
ęśniowej , kąta stawowego
PRZEKRÓJ POPRZECZNY MIĘŚNIA – powierzchnia przekroju poprzecznego
wszystkich jego włókien.
Przekrój mięśnia prostopadły do wszystkich jego włókien w najgrubszym miejscu, gdy jest
on w połowie całkowitego wydłużenia i całkowitego skrócenia. Im większy przekrój, tym
większe napięcie może wyprodukować mięsień.
DŁUGOŚĆ MIĘŚNIA - definiowana jest przez długość brzuśca mięśniowego, a więc nie
wliczamy ścięgna.
KĄT STAWOWY – w płaszczyźnie strzałkowej i czołowej nazywamy kąt, który tworzą dwie
proste, stanowiące osie symetrii (podłużne) dwu sąsiednich członów, lub dla stawów
‘’przytułowiowych’’( ramiennych i biodrowych) – prosta równoległa do osi kręgosłupa z osią
podłużną danego członu, natomiast w płaszczyźnie poprzecznej nazywamy kąt tworzony
przez osie, wokół których odbywa się ruch zginania i prostowania w dwóch sąsiednich
stawach. W obrębie kręgosłupa kąty stawowe określają położenie dwóch sąsiednich kręgów
KĄT DZIAŁANIA SIŁY MIĘSNIA – jest to kąt, który tworzą: linia łącząca punkt przyczepu
mięśnia z osią obrotu w stawie oraz linia styczna do ścięgna mięśniowego w punkcie jego
przyczepu. Kąt działania mięśnia może być zwiększony przez hypomochlion, który stanowi
wyniosłość kostna lub inny element tkanki łącznej, powodujące zwiększenie kąta działania
mięśnia.
24.skurcz mi
ęśnia, skurcz tężcowy( zupełny i niezupełny),skurcz izotoniczny-
izometryczny-aukotoniczny,,czynno
ść statyczna i dynamiczna,praca koncentryczna i
ekscentryczna.
Skurcz mięśnia
• W wyniku procesów elektrochemicznych zachodzących w mięśniu wzrasta jego
naprężenie, a ponieważ mięsień jest w stanie pokonać napotkany opór dochodzi do skurczu
czyli skracania jego długości.
• Siła skurczu w organizmie człowieka zależy od:
§ Liczby jednostek motorycznych biorących udział w skurczu;
§ Częstotliwości, z jaką poszczegolne jednostki motoryczne są pobudzane;
§ Stopnia rozciągnięcia mięśnia przed jego skurczem.
Rodzaje skurczów mięśnia
• Wyróżniamy dwa rodzaje pojedynczych skurczów mięśnia:

§ skurcz izotoniczny- gdy komórki mięśniowe skracają się i cały mięsień ulega skróceniu,
jego napięcie zaś nie zmienia się. Przyczepy mięśnia w układzie szkieletowym zbliżają się
do siebie
§ Skurcz izometryczny- charakteryzuje się zwiększeniem napięcia mięśnia bez zmian jego
długości. Przyczepy mięśnia w układzie szkieletowym nie zmieniają swojej odległości.
• Skurcz tężcowy- jest to długotrwały skurcz mięśnia, powstaje pod wpływem sumowania
skurczów pojedynczych.
• Wyróżniamy:
§ Skurcz tężcowy zupełny- występuje wtedy kiedy bodźce pobudzają mięsień w odstępach
czasu krótszych niż trwa skurcz pojedynczy.
§ Skurcz tężcowy niezupełny- występuje jeśli pobudzenie mięśnia następuje w odstępach
czasu dłuższych, niż trwa skurcz pojedynczy, co pozwala na częściowy rozkurcz mięśnia
między działaniem poszczególnych bodźców.
§ Skurcz auksotniczny- są to mieszany skurcz tężcowy mięśni szkieletowych. Skurcz ten
powoduje jednoczesne zbliżenie przyczepów i zwiększenie napięcia mięśnia.
Podstawowe czynności mięśnia
• Czynnością mięśnia będziemy nazywać takie jego działanie, któremu towarzyszy
elektryczny potencjał czynnościowy
• Rodzaj czynności mięśnia zależy od relacji między siłą przez niego wywołaną (lub
momentem siły) a siłą (momentem siły) zewnętrzną.
• W opisie czynności mięśnia i siły przez niego wywołanej odwołujemy się do
towarzyszącej temu zmiany jego długości (tzn. zmiany odległości między jego
przyczepami: początkowym i końcowym)
Czynność statyczna
• O czynności statycznej mówimy wówczas, gdy pobudzony mięsień nie zmienił swojej
długości i tym samym nie zmieniła
się odległość między jego przyczepami
•Mięsień działający statycznie spełnia następujące funkcje względem układu ruchu:
§ Stabilizacja – unieruchomienie jednego segmentu ciała, np. w stawie ramiennym, by
stworzyć stabilną podstawę oparcia dla mięśni mających przyczepy początkowe na
ramieniu, a działających na przedramię. Znaczy to, że mięśnie działające na staw
ramienny, unieruchamiając go, pełnią funkcję stabilizacyjną.
§ zrównoważenie (utrzymanie) sił zewnętrznych – dotyczy to sytuacji, gdy momenty sił
mięśniowych (Mm), generowane przez siły mięśni Fi, równoważą momenty zewnętrzne
(Mz), skutkiem czego utrzymany przedmiot lub segment ciała może być nieruchomy:
§ wzmocnienie układu biernego (przede wszystkim torebkę stawową i więzadła).

Czynność dynamiczna
• O czynności dynamicznej mówimy wtedy, gdy pobudzony mięsień zmienia swoją
długość.
• Mamy dwa rodzaje czynności dynamicznej mięśnia:
§ czynność koncentryczną gdy suma momentów sił mięśniowych jest większa od przeciwnie
skierowanej sumy momentów sił zewnętrznych i mięsień pokonując opór zewnętrzny, skraca
się:
§ czynność ekscentryczną gdy suma momentów sił mięśniowych w stawie jest mniejsza
od przeciwnie skierowanej sumy momentów sił zewnętrznych i mięsień, ustępując przed
siłą zewnętrzną jest rozciągany:
• Przykłady czynności dynamicznych mięśni:
*** unoszenie kończyny górnej – odwodzenie- do poziomu jest czynnością koncentryczną,
głównie mięśnie naramiennego. Z tej pozycji powolne opuszczanie kończyny –
przywodzenie – jest czynnością ekscentryczną tegoż mięśnia.
*** Wstawanie z przysiadu wykonuje się m.in. Przez prostowanie stawu kolanowego. Taki
ruch w tym stawie spowodowany jest czynnością koncentryczną mięśnia czworogłowego
uda. Powrót do przysiadu jest z kolei kontrolowany przez czynność ekscentryczną tego
mięśnia; moment siły prostownika kolana jest tu mniejszy od momentu siły zewnętrznej
wywołanej przez siłę grawitacji.
25.funkcja stabilizacyjna, dynamiczna i podaj przykłady.
FUNKCJA STABILIZACYJNA - polega na unieruchamianiu segmentu ciała, by dać
stabilną podstawę oparcia innym mięśniom np. mm. unieruchamiające st. ramienny tworzą
stabilną podstawę oparcia dla mm. Mających przyczepy początkowe na ramieniu, a
działających na przedramię.
Funkcja ta wiąże się z czynnością statyczną mięśnia, jest ona blokadą nadmiernej liczby
stopni swobody. Polega na blokowaniu pewnych segmentów ciała, które nie biorą udziału w
ruchu, ale stanowią podstawę biomechaniczną dla ruchu np. m czworogłowy uda.
FUNKCJA DYNAMICZNA – polega na wykonaniu jakiegoś ruchu musi być poprzedzona
przez funk. stabilizacyjną, bo najpierw trzeba ustabilizować staw i zablokować mm nie
biorące udziału w ruchu, by można było uruchomić mięśnie wykonujące ruch.
26.ogólne czynniki wpływaj
ące na siłę mięśnia(od czego zależy siła mięśnia?)
Czynniki wpływające na siłę mięśniową to m.in. :
- kształt mięśnia
- powierzchnia przekroju mięśnia
- kąt pierzastości
- długość mięśnia
- kąt stawowy
- ramie siły mięśnia
27.zale
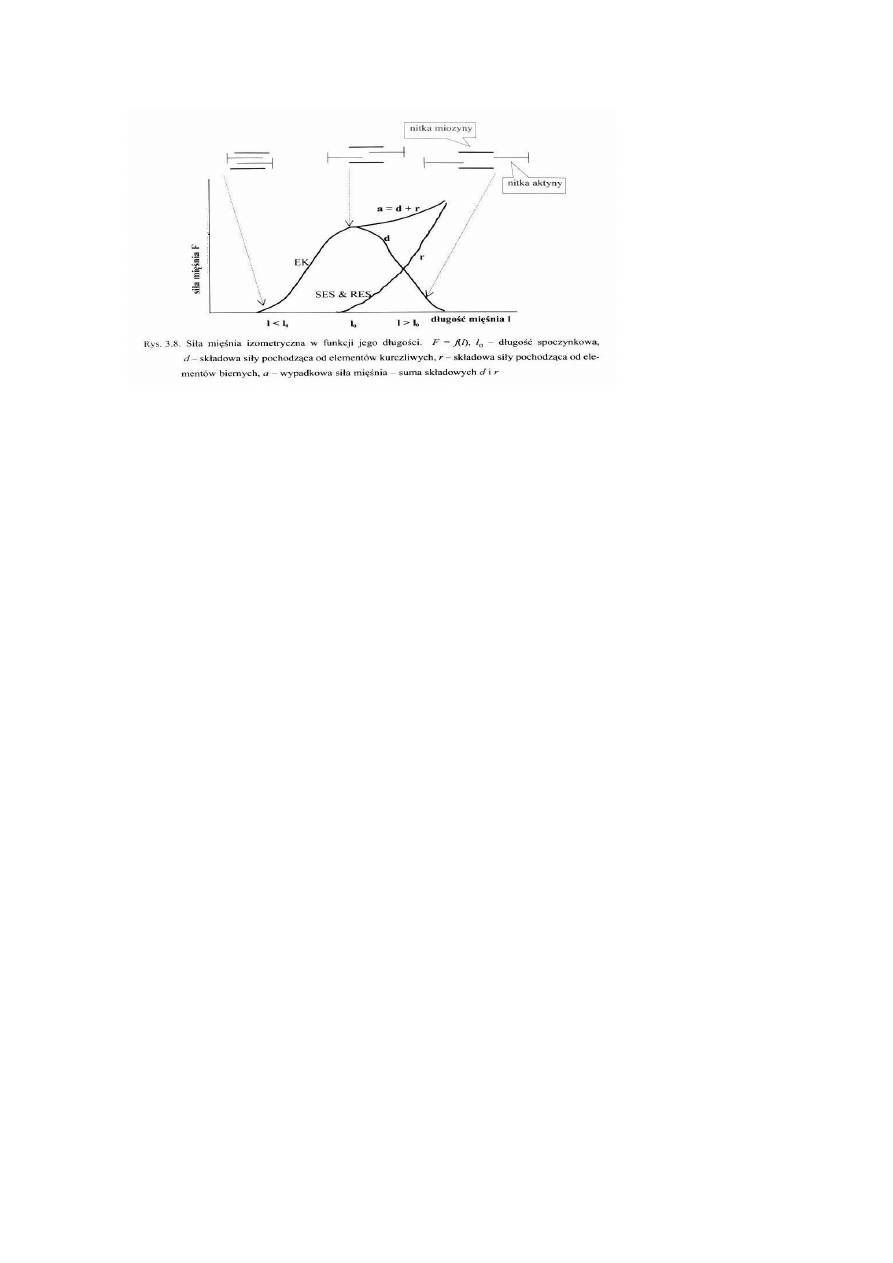
żność typu;siła-długość mięśnia F=F(L)
d- składowa sił pochodząca od elementów kurczliwych
r – składowa sił pochodząca od elem. biernych (SES i RES)
a – wypadkowa siła mięśnia (suma składowych d i r)
krzywa „d”- reprezentuje siły aktywne wyzwalane przez EK,
krzywa ”r”- siły pasywne pochodzące od SES i RES (szeregowych i równoległych
elementów sprężystych)
Obie te siły sumują się zatem krzywa „a” stanowi sumę krzywych „d” i „r” w danym stanie
rozciągnięcia( lub skurczu) na
skali l . Gdybyśmy rozciągnęli nie pobudzony mięsień to otrzymalibyśmy tylko krzywą
„r”.
Związek siły mięśnia z jego stanem rozciągnięcia zależy od udziału sił pochodzących od
EK i elementów sprężystych (gł. RES). Przy udziale obu tych składowych, siła w zasadzie
rośnie wraz z rozciąganiem mięśnia i maleje gdy mięsień się skraca. Kształt owej
zależności nie jest jednak dla wszystkich mięśni i zależy od ich indywidualnych cech
budowy.
Krzywa „d” ma swoje max przy długości mięśnia większej o ok.20% od dł. Spoczynkowej.
Wartość siły wyzwalanej przez m. Zależy od stanu jego długości oraz wykorzystania
elementów sprężystych , wzmagających działanie EK. Biorąc pod uwagę wyłącznie EK,
jego siła osiąga max w pozycji pośredniej długości sarkomeru; spada zaś gdy m. jest
rozciągany bądź też się skraca. Jeżeli dodamy siłę potrzebną na rozciąganie ER (elem.
Spręż), to wraz z rozciąganiem siła mięśni rośnie.
28.zale
żność siła-czas F=F(t)
ZALEŻNOŚĆ SIŁA – CZAS
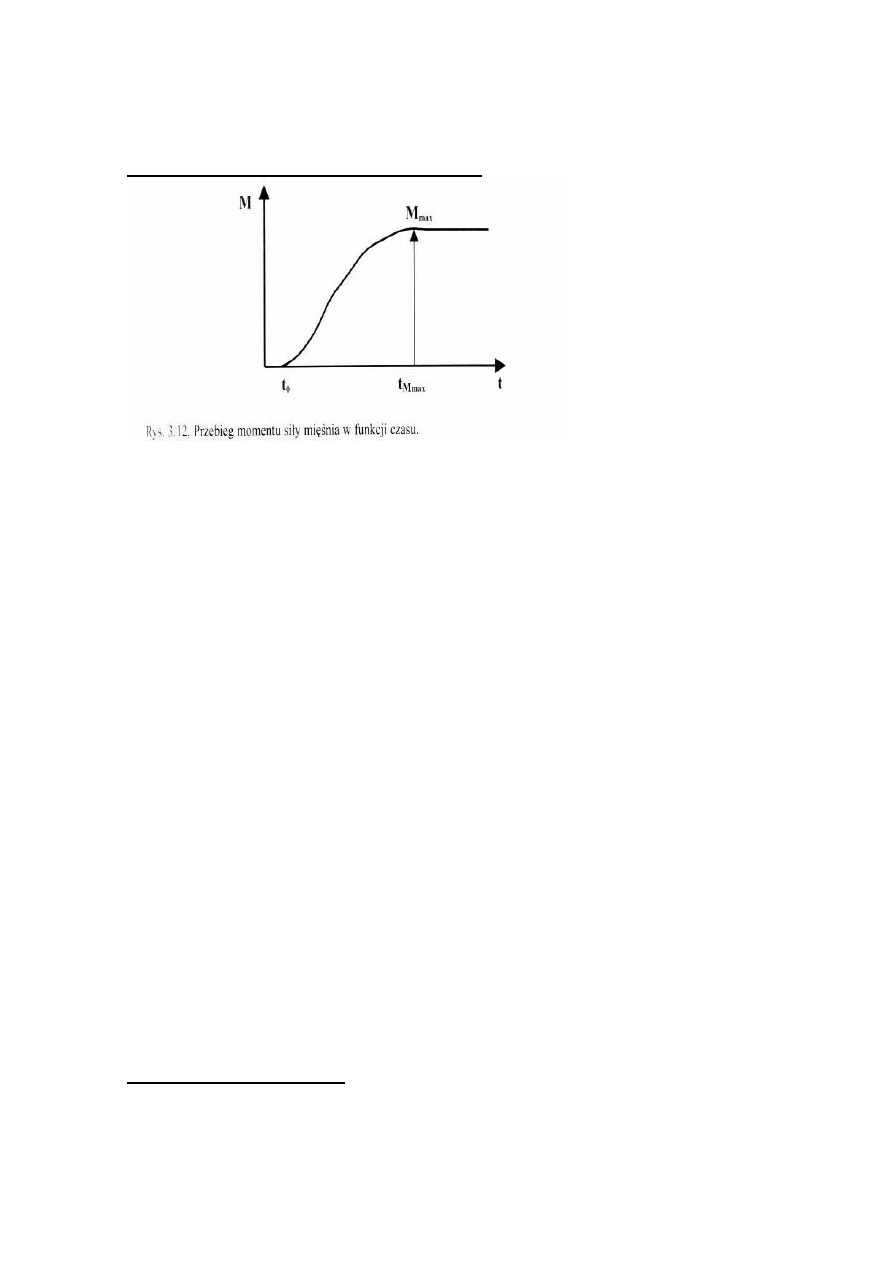
Przebieg momentu siły mięśnia w funkcji czasu: (Rys 3)
*Moment siły mięśniowej narasta od wartości zerowej do max, początkowo łagodnie,
później gwałtownie i wreszcie w fazie końcowej prędkość narastania siły stopniowo
maleje i spada do zera, gdy krzywa osiąga max ( Mmax)
Na wyzwolenie momentu siły mięsień potrzebuje pewnego czasu, zależy on od grupy i
rodzaju mięśni, od aktualnej temperatury mięśni, składu włókien, pobudzenia i rekrutacji
włókien.
*Początkowa faza narastania siły mięśniowej (od to)
Ponieważ mięsień stanowi strukturę przestrzenną, zbud. Z włókien mięśniowych
rozlokowanych w różnych jego obszarach więc sygnał pobudzenia (rozchodzący się ze
stałą prędkością \ V=const) nie dociera do wszystkich włókien jednocześnie, pokonuje
bowiem różne drogi . Czyli 1 pobudzone są włókna jednostek motorycznych
zlokalizowane najbliżej źródła pobudzenia ; ostatnie- te do których droga pobudzenia była
najdłuższa. Prędkość narastania siły w początkowej fazie jest stosunkowo mała.
*Okres gwałtownego narastania siły.
Ta część krzywej charakteryzuje zdolność mięśnia do szybkiego wyzwalania siły. Wartość
ta często jest opisywana przez gradient, czyli nachylenie krzywej siły względem osi czasu,
który to parametr wyraża średnia prędkość jej narastania.Gradient siły oznacza stosunek
przyrostu siły między parametrami Fa i Fb do czsu ( tb – ta)
G = DF / Dt = Fb – Fa / tb – ta = tg b
Rys 4 Siła mięśniowa F w funkcji czasu t . Definicja gradientu siły mięśniowej.
ˇ Trzeci odcinek łagodnego nasycenia i stabilizacji poziomu siły
Rozwinięcie wartości max momentu siły mięśniowej wymaga czasu 0,2 do 0,5s . Po
pewnym czasie następuje spadek wartości
rozwijanego momentu siły, w wyniku ujawniającego się zmęczenia maksymalnym
izometrycznym naprężeniem mm.

30.
Scharakteryzuj zasady pomiaru siły mi
ęś
ni (momentu siły) w warunkach
statyki.
Metody pomiaru i oceny siły mięśniowej możemy podzielić na dwie duże grupy:
Pośrednie i bezpośrednie.
1.
Metody pośrednie oceniają wielkość i zmiany siły mięśniowej na podstawie wyników
testów ruchowych przeprowadzanych na badanych. Istnieje wiele testów oceny siły
mięśniowej, badających poszczególne grupy mięśniowe (np. liczba podciągnięć w
zwisie, liczba unoszeń w podporze, liczba przysiadów w określonym czasie, liczba
siadów z leżenia w określonym czasie itd.).
2.
Metody bezpośrednie sprowadzają się do pomiaru momentów sił mięśniowych
przeprowadzanych w warunkach statyki (praca izometryczna mm.). Dzieje się tak
dlatego, że siła mięśni w czystej postaci jest niedostępna badaniu. Nie pozwala na to
brak możliwości pomiaru na żywym osobniku wielkości ramienia siły mięśniowej,
kąta pod jakim mięsień przyczepia się do kości, kierunku działania siły mięśnia.
Wobec tego w układzie par biokinetycznych pomiar „bezpośredni” siły mięśniowej
polega na pomiarze momentu siły na zasadzie zrównoważenia momentów siły mięśni
(nieznanych) poprzez momenty oporu (znane).
Warunkiem niezbędnym przeprowadzenia pomiaru jest zapewnienie równowagi
pomiędzy momentami sił zewnętrznych – oporu (
I
R
M
R
×
=
) i mięśniowych
(
r
F
M
F
×
=
).
Ponieważ nie możemy zmierzyć ani siły mięśniowej (F) ani jej ramienia (r) zatem o
wielkości momentu siły mięśniowej wnioskujemy na podstawie momentu siły
zewnętrznej (
R
M
), ponieważ zarówno wielkość siły oporu (R) jak też jej ramię
możemy nie tylko zmierzyć, ale również ustalić. Wolno nam to uczynić jedynie pod
warunkiem zachowania statyki, co pozwala nam na utożsamienie wartości obu
momentów (I zasada dynamiki Newtona).
1.
Ustalanie pozycji pomiarowej – należy zadbać aby część ciała poddana badaniu była
ułożona stabilnie w określonej pozycji. Warunkiem zbudowania prawidłowego
stanowiska pomiarowego jest zachowanie kątów prostych pomiędzy częściami ciała,
pomiędzy kierunkiem siły oporu i mierzoną częścią ciała oraz pomiedzy kierunkiem
siły oporu i układem stabilizującym.
2.
Ustabilizowanie sąsiednich odcinków ciała
3.
Zamierzenie ramienia siły oporu (I)
4.
Wykonanie pomiaru, zapisanie wyniku
5.
Dopilnowanie, aby siła oporu była tka duża, by wykluczyć ruch. Pomiaru należy
dokonywać w staryce, zatem skurcz mięśnia musi być izometryczny. Pomiar misi być
chwilowy, bowiem mierzymy siłę maksymalną – z pominięciem techniki i taktyki
ruchu.
32 Zdefiniuj poj
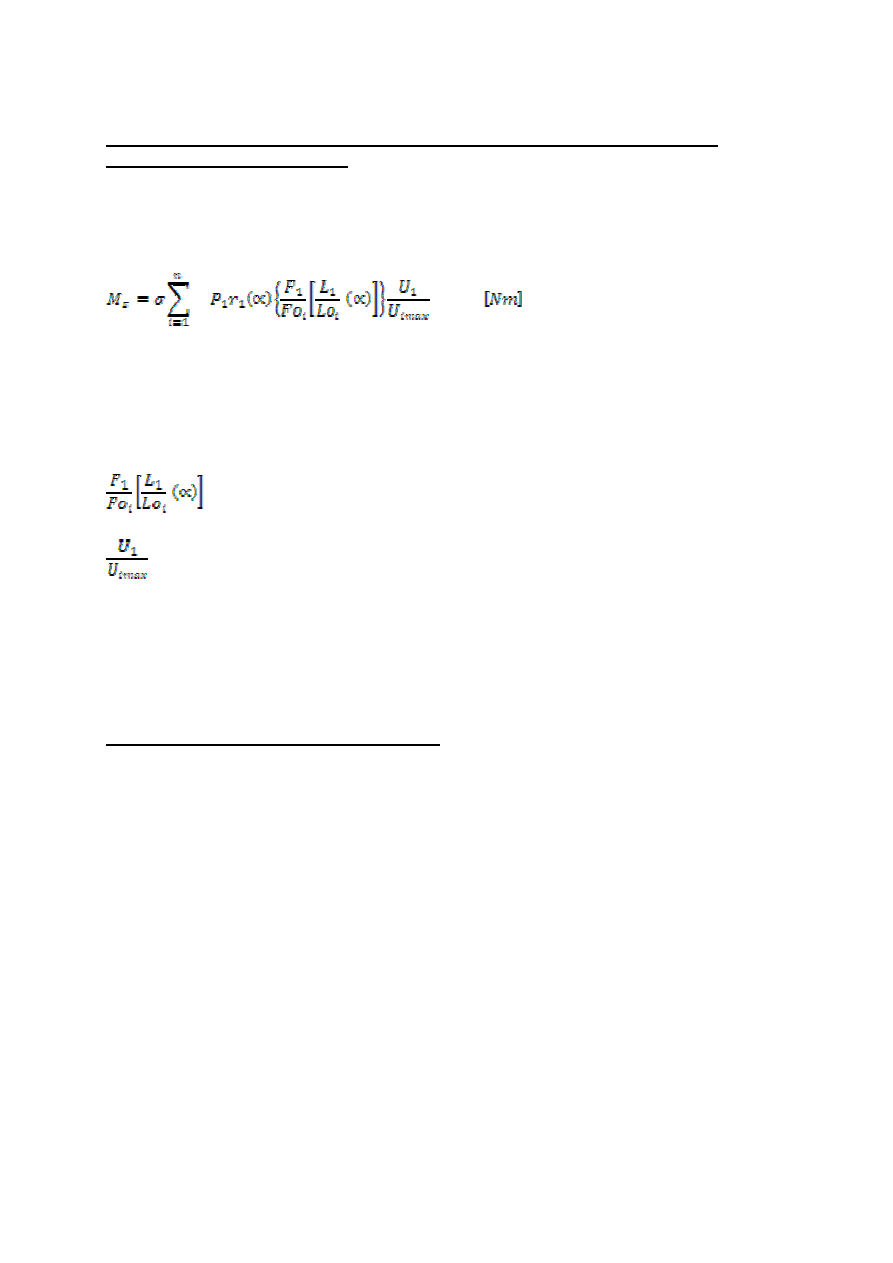
ęcie udziału mięśniowego przedstaw i scharakteryzuj równanie
udziałów mi
ęśniowych Fidelusa
Udział mięśniowy- liczbowa wartość funkcji aktonu mięśniowego w stawie czyli wielkość
rozwijanego momentu siły.
Równanie udziałów mięśniowych K. Fidelusa
Mz- moment siły zewnętrznej
σ
- naprężenie mięśni [N/cm
2
]
P
i-
pole przekroju fizjologicznego i-tego mięśnia [cm
2
]
R
1
- ramię siły i- tego mięśnia [m]
α
- kat stawowy
zależność siły aktywnej od długości
i
- tego mięśnia
- współczynnik pobudzenia
8.3 (36) STABILNO
ŚĆ A RÓWNOWAGA
RÓWNOWAGA to pewien okre
ślony stan układu posturalnego. Stan ten charakteryzuje
pionowa orientacja ciała osiągnięta dzięki zrównoważeniu działających na ciało sił oraz ich
momentów. Równowag
ę zapewnia układ nerwowy przez odruchowe napięcie odpowiednich
grup mięśni nazywanych mi
ęśniami posturalnymi lub antygrawitacyjnymi. (Błaszczyk)
Zdjęcie (pokolorować nazwy potrzebnych mięśni)
STABILNO
ŚĆ jest pojęciem szerszym i oznacza zdolność do odzyskiwania stanu
równowagi. W przypadku postawy człowieka stabilnością nazywamy zdolność do aktywnego
przywracania typowej pozycji ciała w przestrzeni, utraconej w wyniku działania czynników
destabilizujących (czynnikiem destabilizującym może być własna aktywność ruchowa
organizmu lub też siły zewnętrzne pojawiające się wskutek interakcji z otoczeniem.
(Błaszczyk)
stabilność funkcjonalna- wrażliwość postawy na działanie bodźców destabilizujących
stabilność strukturalna- wrażliwość postawy na zmiany struktury sterowania
(np. zmiana lub ograniczenie bodźców wzrokowych, modyfikacja powierzchnii
podparcia)
43.Wyja
śnij, dlaczego dla prawidłowej postawy tak ważna jest kontrola masy ciała
(unikanie nadwagi) oraz siła i wytrzymało
ść mięśni posturalnych? Wskaż, które zespoły
.mi
ęśniowe są „kluczowymi" w tym procesie i uzasadnij biomechanicznie-
kinezjologicznie.
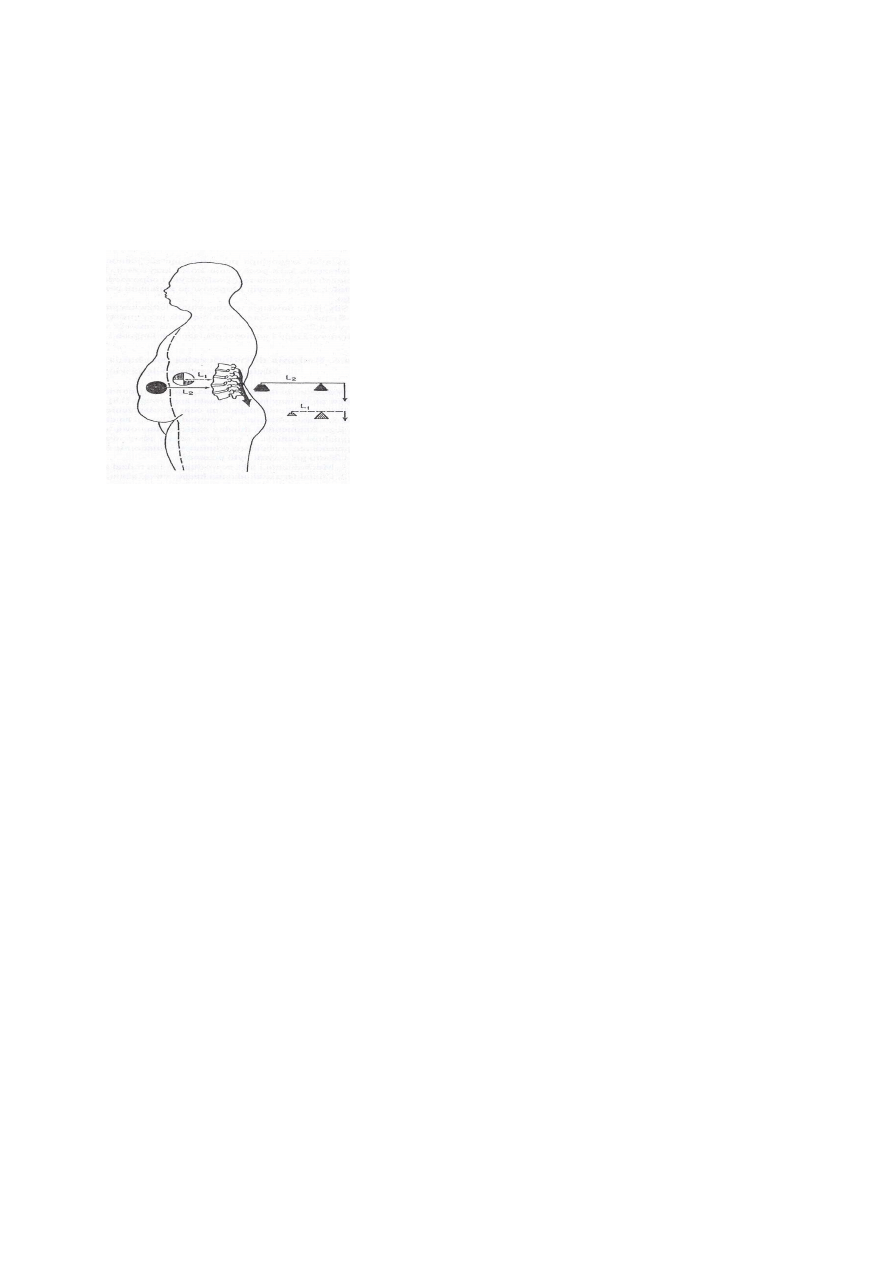
A Istotne jest unikanie nadwagi gdyż w wyniku grubej warstwy tłuszczowej [nadmierny
brzuch], powstaje znaczne obciążenie na wysuniętym do przodu ramieniu. Wywołuje to
zwiększenie obciążeń struktur tylnych kręgosłupa przyczyniając się jednocześnie do
pogłębienia lordozy oraz zwiększenia kata pochylenia kości krzyżowej.
Może dojść do nieprawidłowego rozmieszczenia masy ciała, co powoduje zwiększenie ryzyka
wad kręgosłupa w płaszczyźnie czołowej i strzałkowej. Przy większej masie ciała istnieje
większy nacisk na elementy podporowe (kości, stawy...), które pod wpływem tej siły ulęgają
deformacji.
Nadwaga powoduje dodatkowe obciążenie dla mięśni, które utrzymują równowagę-zwiększa
się lordoza kręgosłupa lędźwiowego-przeciążenie tegoż odcinka.
SIŁA I WYTRZYMAŁOŚĆ
Umożliwiają prawidłową stabilizację postawy ciała. Utrzymują prawidłowe krzywizny
kręgosłupa. W przypadku osłabienia, zmęczenia mięśni powodują przyjmowanie tzw.
„postawy zmęczeniowej”, która pogłębia krzywizny kręgosłupa oraz niekiedy ugięcia jednej
nogi (skośne ustawienie miednicy). Stan taki wynika z odruchowego przemieszczenia ciężaru
ciał na elementy podporowe (obarczanie przemęczonych mięśni).
KLUCZOWE ZESPOŁY MIĘŚNIOWE
Siła mięśni prostowników- jest znacznie większa niż zginaczy. Siła grawitacji próbuje zginać
ciało ku przodowi, ale podobna do działania szyny funkcja m. Grzbietowych w szczególności,
podobnie jak funkcja mięśni pośladkowych większych dla stawu biodrowego, a m.
Czworogłowych uda dla st. kolanowych, zapobiega takiemu zginaniu ciała. Ponadto mięśnie
te wzmocnione i otoczone są masywnymi powięziami, mającymi w przypadku ud własne
mięśnie napinające, np. m. Naprężacz powięzi szer., które kombinują się z m. Pośladkowym
wlk. Przez posiadanie wspólnych przyczepów do pasma biodrowo-piszczelowego.
Ogólnym efektem ich działania jest ułożenie elastycznej klamry zapobiegającej zginaniu się
ciała. To zabezpieczenie jest tak skuteczne, że człowiek może się obciążać dodatkowym
ciężarem, przekraczającym ciężar własny obciążenia te są wytrzymywane, tym skuteczniej,
im bardziej z tyłu umieszczone.
Napięcie mm postawy i antygrawitacyjnych jest większe niż kinetycznych. Mm, które
utrzymują kolumnę kostnych segmentów jeden na drugim są w ciągłym stanie skurczu
tonicznego.

Pozycja stojąca zawsze wymaga skurczu mięśni, ich zwiotczenie nigdy nie jest całkowite.
Istnieje nieznaczne boczne przemieszczenie ciężaru ciała przez staw krzyżowo-biodrowy i kk
miednicy na staw biodrowy po każdej stronie, przez które linia ciężkości może przechodzić.
Powoduje to, że miednica kołysząc się ku tyłowi musi być zrównoważona nad szczytami obu
głów kości udowych , czyli wokół wspólnej osi stawów biodrowych. Musi to pociągać za
sobą skurcz mięśni mm. Przednich stawów biodrowych: biodrowo-lędźwiowego i
grzebieniowego oraz mięśni tylnych stawu biodrowego: mm. Pośladkowych , dwugłowego
uda, półbłoniastego i półścięgnistego, a ponadto dla bocznej równowagi w ruchu-
pośladkowych średniego i małego.
Każde odchylenie od płaszczyzny wyprostnej wymaga większej aktywności tych mm i jak
zwykle większą prace wykonują prostowniki.
44.Zdefiniuj poj
ę
cia: koordynacji, koordynacji: nerwowej, mi
ęś
niowej, ruchowej
Koordynacja- zdolność takiego połączenia aktywności różnych mięśni, aby ruch był
wykonywany dokładnie i po właściwym torze.
Koordynacja nerwowa- wg Dońskiego współdziałanie procesów nerwowych, które kierują
ruchami poprzez pobudzenie mięśni;
Koordynacja mięśniowa- współdziałanie naprężenia mięśni przekazujących siły, które sterują
poszczególnymi częściami ciała, uwzględniając przy tym bodźce systemu nerwowego oraz
inne czynniki (wew. i zew. pola sił)
Koordynacja ruchowa- wg Fidelusa to współdziałanie mechanizmów fizjologicznych głównie
nerwowo-mięśniowych, zapewniające wykonywanie realnego i konkretnego zadania
ruchowego zgodnie z programem;
45. Scharakteryzuj „mechanizmy koordynacyjne ruchu" wyra
żone w pytaniu: jak
pracuje układ nerwowy podczas koordynacji ruchu?
Mechanizmy koordynacyjne ruchu
Układ nerwowy musi otrzymywać stałą informację o parametrach ruchu (siła, prędkość) oraz
o naturalnych i fizjologicznych możliwościach mięśni. Służą do tego receptory (zmysły).
W OUN konieczne są odpowiednie ośrodki, które przeanalizuję a następnie dokonają syntezy
wszystkich bodźców płynących od receptora.
Układ nerwowy powinien mieć dopracowany program działania ruchowego, które określa cel
zadania ruchowego (co i jak ma wykonać?).
Układ nerwowy musi dysponować mechanizmem porównującym, który będzie oceniać czy
ruch przebiega zgodnie z założonym programem. Będzie oceniał czy siły prędkości wywołują
zamierzony rezultat ruchowy.
W układzie nerwowym muszą być ośrodki, które na podstawie oceny zgodności przebiegu
ruchu z jego założeniem wyślą odpowiednie bodźce ruchowe do mięśni
46.Przedstaw i scharakteryzuj model procesu koordynacji ruchowej wg N.A.
Bernsteina.
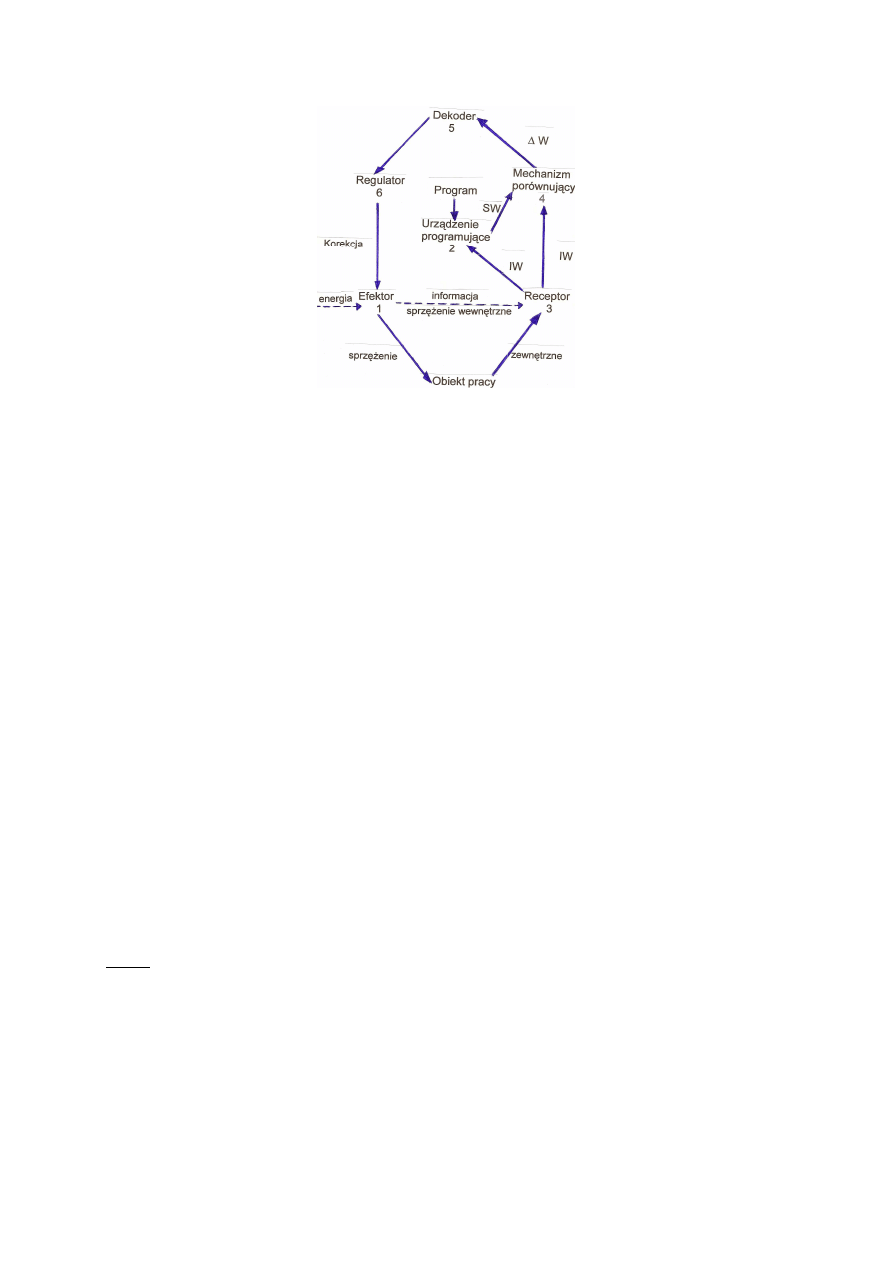
SW – wartość pożądana
IW – wartość bieżąca
W myśl założeń N. A. Bernstejna istota sterowania polega na nadążnym porównywaniu
wartości pożądanej ( Sollwert SW, niem.), którą wypracowuje człowiek w toku uczenia się
jako programu ruchu, z faktyczną wartością bieżącą parametrów ruchu ( Istwert – IW ).
W konsekwencji mięśnie są pobudzane przez układ nerwowy ( regulator ) nie według stałego
schematu, lecz ze stałym dopasowaniem się (
∆
W ) do zaistniałej sytuacji tak , aby końcowy
rezultat ruchowy umożliwiał realizację zadania ruchowego.
Porównanie wartości SW i IW w mechanizmie porównującym prowadzi do spełnienia trzech
zadań, a mianowicie:
-
określa impulsy korekcyjne
-
akceptuje wykonany etap ruchu
-
umożliwia określenie nowej wartości SW, jeżeli ruch się nie opłaca lub jest niemożliwy
do wykonania
Czas obiegu informacji od receptora do efektora
∆
t wynosi ok. 0,07 – 0,12 s.
Proces sterowania cyklicznego przebiega więc z częstotliwością 8 – 14 Hz
Wartość
∆
t jest dolną granicą czasu reakcji prostej ( refleksu ).
47.Scharakteryzuj podział ruchów dowolnych - na podst. teorii sterowania N.A.
Bernstejna.
Ruchy dowolne dzielą się na balistyczne i ciągłe (precyzyjne).
Balistyczne są sterowane według reguły ANTE-POST FACTUM (przed i po główną częścią).
Czas ich trwania to 0,1-0,2s.
Ciągłe są sterowane według reguły IN FACTO (w trakcie przebiegu)
.(46)Przedstaw i scharakteryzuj model procesu koordynacji ruchowej wg N.A. Bernsteina
48.Zdefiniuj poj
ę
cie chodu.
Chód – forma lokomocji, w której funkcję podporowo-napędową spełniają kkd, pewną zaś
pracę równoważną kkg. Praca kończyn jest naprzemianstronna, a ruch cykliczne tj. określone
fazy ruchów kończyn powtarzają się.
Celem chodu jest przemieszczanie ciała, natomiast jego struktury: kinematyczna i
dynamiczna powinny się tak kształtować, aby lokomocja była możliwie ekonomiczna.
Składowa pionowa siły odbicia (rekcji) jest mniejsza od ciężaru człowieka, dlatego w chodzie
nie występuje faza lotu.

Ekonomiczny chód występuje przy częstotliwości 90-110 kroków/min.
Wówczas składowa pionowa siły reakcji mieści się w przedziale 0,8-1,2 Q (gdzie Q- ciężar
ciała)
Przy częstotliwości 195 – 200 kroków/min składowa pionowa siły reakcji przekracza 2Q i
chód przechodzi w bieg.
49.Scharakteryzuj struktur
ę
biokinematyczn
ą
chodu normalnego
(standardowego): fazy i okresy cyklu chodu, trajektoria OSM, mechanizm
zapocz
ą
tkowania chodu wyra
ż
ony w zmianie poło
ż
enia OSM.
Cykl chodu
Trwa od chwili kontaktu pięty z podłożem jednej kończyny dolnej, do chwili kolejnego
kontaktu pięty tej samej kończyny z podłożem.
Obejmuje 2 kroki: 1 lewej i 1 prawej kończyny dolnej
Cykl chodu (100%):
Faza podporu (60%) - podpór piętą
-
podpór środkowy
-
podpór śródstopia
Faza wymachu (40%) -okres przyspieszenia
-
okres przeniesienia
-
okres hamowania
Kontakt początkowy związany jest z zetknięciem pięty z podłożem w chwili rozpoczęcia fazy
podparcia. Czas między kolejnymi kontaktami początkowymi tej samej nogi wyznacza okres
kroku.
Kontakt początkowy rozpoczyna fazę podparcia, a kończy ją moment oderwania palców stóp
od podłoża. W tym czasie rozpoczyna się faza wymachu, która kończy się kolejnym
zetknięciem pięty z podłożem.
Okresy kiedy obie kończyny stykają się jednocześnie z podłożem nazywamy fazami
podwójnego podparcia. Pierwsza faza podwójnego podparcia nazywa się reakcją obciążenia,
druga reakcją odciążenia. Reakcję obciążenia rozpoczyna gwałtowne zatrzymanie ruchu
przenoszonej kończyny spowodowane zetknięciem pięty z podłożem. W tym czasie stykająca
się także z podłożem kończyna przeciwstawna popycha ciało do przodu , przygotowując się
do wymachu. Odepchnięcie i związana z nim energia pozwala na przeniesienie całego
obciążenia na drugą nogę. Po obciążeniu kończyny przeciwstawnej następuje faza
pojedynczego podparcia. Faza pojedynczego podparcia trwa tyle samo, ile faza wymachu
przeciwstawnej kończyny.
Tor OSM
Nie jest prostoliniowy, a prędkość ruchu nie jest stała.
W płaszczyźnie strzałkowej oscyluje w górę i w dół. Są to oscylacje regularne, których
maksima przypadają na środek fazy pojedynczego podparcia, a minima na fazę podwójnego
podparcia. Przeciętne przemieszczenie pionowe wynosi 4 cm.
W płaszczyźnie poprzecznej amplituda zależy od sposobu oraz odległości stawiania stóp od
linii środkowej wyznaczającej kierunek chodu. Skrajnie lewe położenie przypada na środek
fazy podparcia lewej nogi, a skrajnie prawe na środek fazy podparcia nogi prawej.
Pełny cykl omawianego ruchu realizuje się z częstotliwością dwukrotnie mniejszą niż
oscylacja pionowa. Wzniesienie OSM przypada na każdą fazę pojedynczego podparcia, czyli
na pojedynczy krok, zaś skrajnie boczne położenie na fazę pojedynczego podparcia danej
kończyny czyli raz na podwójny krok.
Zapoczątkowanie chodu.
Można obrazowo przedstawić jako wytrącenie ciała ze stanu równowagi w określonym,
zamierzonym kierunku. Zaczyna się od spadku aktywności bioelektrycznej mięśni
utrzymujących postawę stojącą. Do tych mm. należą brzuchaty łydki, czworogłowy uda,
pośladkowy wielki oraz prostownik grzbietu.
W wyniku chwilowego spadku naprężenia tych mm rzut pionowy środka ciężkości zakreśla
tor: w bok, w tył,a następnie w przód, stwarzając korzystny moment siły dla mm kd w celu
przesunięcia masy ciała w przód i wykonania pierwszego kroku.
49.Scharakteryzuj struktur
ę
biokinematyczn
ą
chodu
normalnego (standardowego): fazy i okresy cyklu
chodu, trajektoria OSM, mechanizm zapocz
ą
tkowania
chodu wyra
ż
ony w zmianie poło
ż
enia OSM.
Chód jest ruchem cyklicznym i wyodrębniamy w nim
powtarzające się dwie fazy:
1.
Faza podporu [FP] 60% cyklu
Kryteria: kontakt stopy lub jej części z podłożem.
Okresy:
•
FP 1 -> Podpór na pięcie [10% cylku]
•
FP 2 -> Podpór płaski na całej stopie [30% cyklu]
•
FP 3 -> Podpór na przodostopiu i palcach [20% cylku]
2.
Faza wymachu [FW] (wahadła) 40% cyklu
Kryteria: zmiana przyspieszenia kończyna wymachowej.
Okresy:
•
FW 1 -> okres przyspieszenia [13% cyklu]
(okres czynny – głównie dla zginaczy stawu biodrowego)
•
FW 2 -> okres przeniesienia [17% cyklu]
(okres bierny – działa głównie siła bezwładności)
•
FW 3 -> okres hamowania [10% cyklu]
(okres czynny – działają głównie prostowniki st. biodrowego i zg. st. kolanowego)
3.
Okres podwójnego podporu [OPP] – faza przejściowa
Kryteria: równoczesny podpór na obu KKD np. lewa noga w FP 3, a prawa w FP 1
Tor nie jest prostolinijny i prędkość ruchu nie jest stała.
W płaszczy
źnie strzałkowej: regularna oscylacja w pionowa, której maksima
przypadają na środek fazy podporu[FP 2] a minima na okres podwójnego podporu
[OPP]. Wielkość oscylacji (przeciętnie 4cm) zależy m.i od dł kroku.

W płaszczy
źnie poprzecznej: oscylacja boczna, o amplitudzie dwukrotnie
mniejszej(niż w pł strzałkowej)2cm, zależy od sposobu stawiania stóp od linii
ś
rodkowej wyznaczającej kierunek chodu(np. skrajne lewe położenie przypada na
ś
rodek fazy podparcia lewej). Częstotliwość omawianego ruchu jest dwukrotnie
mniejsza niż oscylacje poziome
Wzniesienie OSMprzypada na każdą fazę pojedynczego podporu(na każdy krok),
skrajne lewe/prawe położenie przypada odpowiednio na fazę kończyny lewej/prawej.
Największy przyrost prędkości przypada na koniec fazy podparcia, największe
opóźnienie w okresie przemieszczania się OSM na kończynę podporową(początek
okresu podwójnego podparcia).
Mechanizm zapoczątkowania chodu wyrażony w zmianie położenia OSM.
Rozpoczęcie chodu można określić jako wytrącenie ciała ze stanu równowagi w
określonym, zamierzonym kierunku. Przebieg: spadek napięcia mięśni(brzuchaty łydki,
czworogłowy, pośl. wielki, prost. grzbietu) rzut pionowy OSM zakreśla tor w bok i w
tył, a następnie w przód, stwarzając korzystny moment siły dla mięśni kończyny dolnej
w celu przesunięcia masy ciała w przód i wykonania pierwszego kroku.
50.Scharakteryzuj szczegółowe zmiany poło
ż
enia k
ą
towego stawów:
biodrowego, kolanowego i skokowo-goleniowego w cyklu chodu (dla
płaszczyzny strzałkowej).
Faza podporu:
Kontakt piętym z podłożem: stopa w niewielkim zgięciu grzbietowym, st kolanowy zgięcie
5°, zgięcie w st biodrowym 30°.
Dalej następuje ekscentryczne opuszczanie stopy, zg podeszwowe 15°, staw kolanowy ugina
się do 20°, staw biodrowy nadal w pewnym zgięciu.
Następnie (biodro, kolano i st skokowy- w jednej linii) dochodzi do zgięcia grzbietowego 10°
w st skokowym, kolano – wyprost do 5°, biodro- wyprost do zera.
Później dochodzi do zgięcia podeszwowego 15°(przeniesienie ciężaru na przodostopie),
kolano wyprostowane, biodro – wyprost 15°
Faza wymachu:
Ze zgięcia podeszwowego przejście do pozycji neutralnej, kolano – zgięcie 60°, biodro- z
max wyprostu do zgięcia 40°
Zgięcie grzbietowe 15°, kolano – wyprost do 5°, biodro – zmniejszenie zgięcia do 30°(dalej
kontakt pięty z podłożem, faza podporu)
Przybliżone zakresy ruchów umożliwiające prawidłowy mechanizm chodu:
Staw skokowy: zg grzbietowe15°, zg podeszwowe 15°
Staw kolanowy: wyprost do 0°, zgięcie 60°
Staw biodrowy: wyprost 15°, zgięcie 40°
51.Scharakteryzuj struktur
ę biodynamiczną chodu standardowego: koordynacja
neuromi
ęśniowa wybranych zespołów mięśniowych; dynamiczna reakcja podłoża -
przebiegi czasowe pionowej i poziomej składowej.
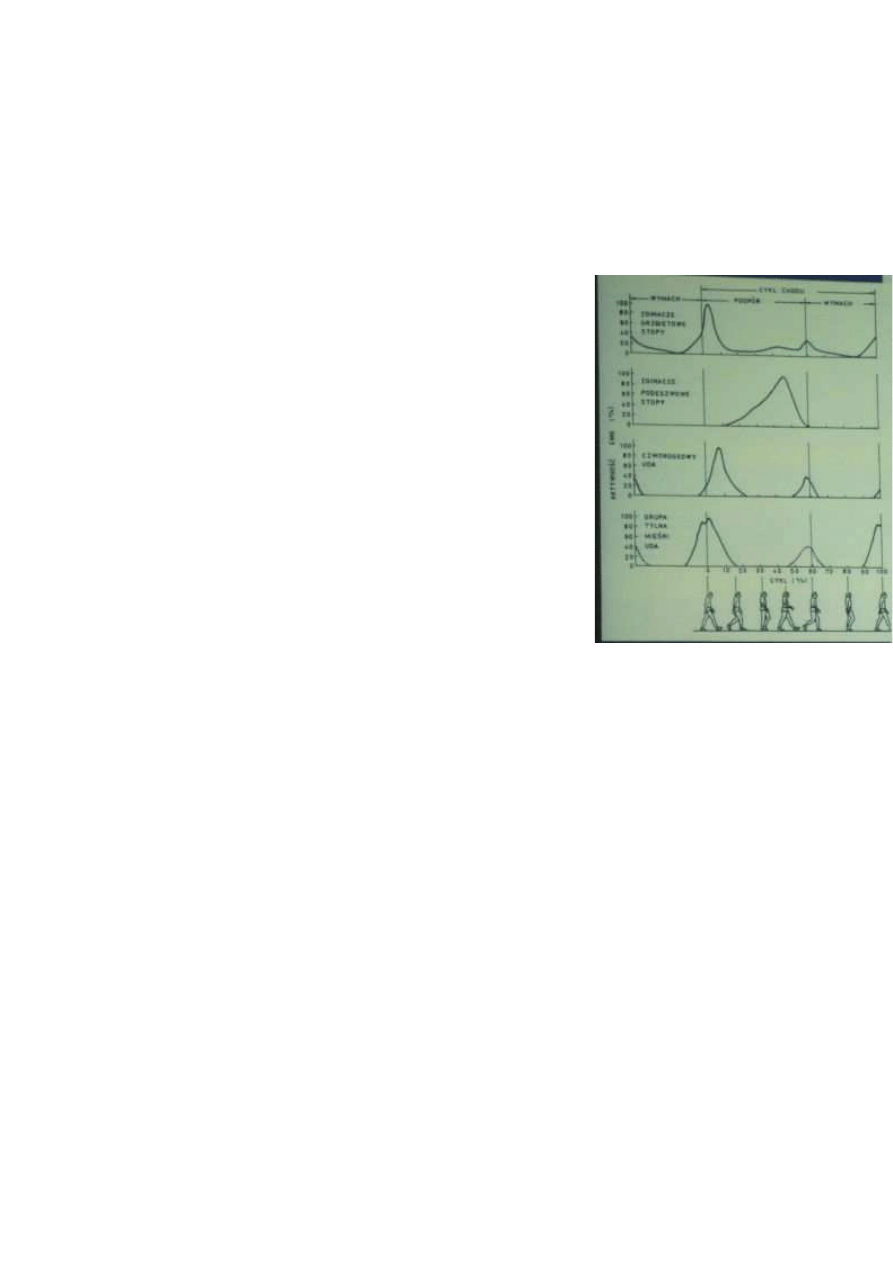
Koordynacja neuromięśnowa:
1.
Aktywność EMG pojawia się fazowo
2.
Maksymalne wartości pobudzenia utrzymywane są bardzo krótko
3.
Na granicach fazy najczęściej występuje aktywność EMG
4.
Zginacze grzbietowe stopy: max aktywność chwilę po momencie podporu pięty, spada
stromo oscylując fazie podporu właściwego przodostopiu na niewielkim poziomie. W
fazie wymachu, włączają się przed momentem podporu piętą , przeciwdziałając
opadaniu stopy w dół. Są aktywne również na początku fazy wymachu zginając
grzbietowo stopę po jej oderwaniu od podłoża.
5.
Zginacze podeszwowe stopy: są aktywne wyłącznie w fazie podporu, max aktywność
osiągają łagodnie z pewnym opóźnieniem do fazy podporu piętą. Spada gwałtownie w
końcu fazy podporu. W fazie wymachu, cisza bioelektryczna mięśnia.
6.
Mi
ęsień czworogłowy: włącza się z wyprzedzeniem przed ustawieniem pięty na
podłożu(jeszcze w fazie wymachu). Max pobudzenie występuje w momencie
ekscentrycznego sterowania zginaniem stawu kolanowego, po czym dość szybko spada
do zera. Druga faza pobudzenia na granicy końca fazy podporu i początkiem fazy
wymachu.
7.
Grupa tylna mi
ęśni uda: (to moja interpretacja, tamto dyktował dworas) są czynne
głównie na granicy fazy wymachu i podporu, hamują ruch wymachowy kończyny, a
następnie zginają ją do tyłu.
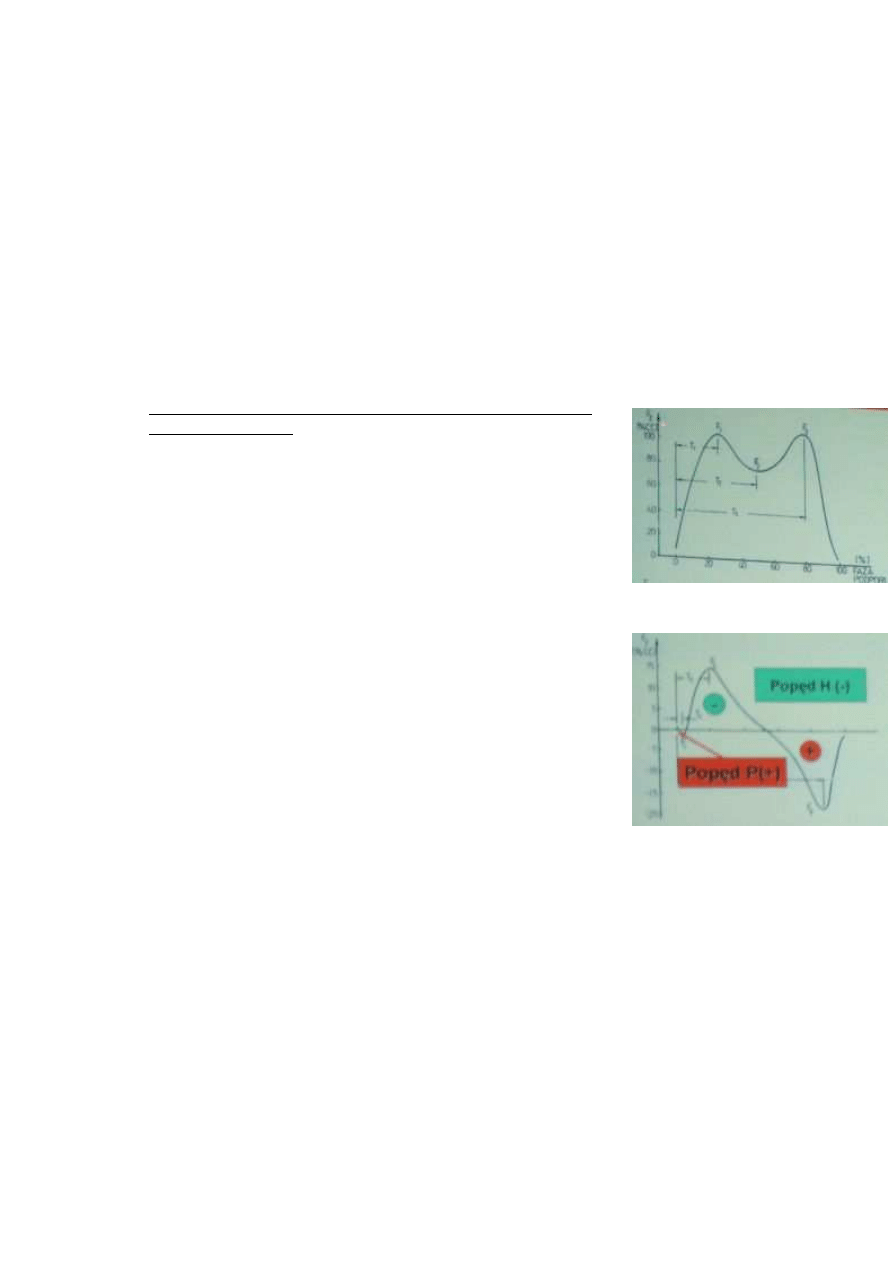
Dynamiczna reakcja podłoża -przebiegi czasowe pionowej i
poziomej składowej. (mówił że trzeba rysować wykresy)
1.
Składowa pionowa (Z): w normie siodło z dwoma łękami
•
„Ł. Tylny” (FP1/FP2) tzw. pierwsze dociążenie podłoża,
charakteryzuje sposób obciążania pięty. Wartości: ok. 120%CC
(na rys F1)
•
„siedzisko” (FP2) Odciążenie podłoża (cała stopa w kontakcie),
charakteryzuje dynamikę wymachu kończyny przeciwnej.
Wartość: 80%CC (na rys F2)
•
„Ł. Przedni” (FP2/FP3) tzw. drugie dociążenie podłoża, charakteryzuje sposób
obciążania przodostopia. Wartości: 120%CC (na rys F3)
2.
Składowa pozioma (Y):
•
Kontakt pięty z podłożem -> siła działa z tyłu do przodu, nadaje
popęd przyspieszający(krótko)
•
Loading responce -> siła działa z przodu do tyłu, nadaje popęd
hamujący.
•
Po tym jak biodro znajduje się przed stopą, znów mamy popęd
przyspieszający.(siła działa z tyłu do przodu)
65.Scharakteryzuj mechanizmy przeci
ążeniowe i zjawisko niestabilności kręgosłupa.
Powstawaniu przeciążeń sprzyjają najczęściej niekorzystne sytuacje biomechaniczne,
związane zwykle z wykonywaniem zawodu, uprawianiem sportu wyczynowego, stanem
fizycznym człowieka, wadami wrodzonymi, itp. Kręgosłup poddawany jest różnego rodzaju
obciążeniom np. ściskaniu, rozciąganiu, zginaniu lub też skręcaniu. Stabilność wewnętrzną
kręgosłupa zapewnia ciśnienie wewnątrz krążków międzykręgowych i więzadła, natomiast
stabilność zewnętrzną zapewniają mięśnie i np. ciśnienie w jamach ciała.
Są 2 mechanizmy przeciążenia kręgosłupa:
Mechanizm przeciążenia doraźnego – ma podłoże urazowe, związane z doraźnym
przekroczeniem wartości granicznej wytrzymałości struktur kostnych kręgosłupa; np.
wypadki lokomocyjne, upadki z wysokości.

Mechanizm przeciążenia zmęczeniowego – w którym działają długotrwałe cykliczne
obciążenia naruszające pierwotną stabilność kręgosłupa, prowadzące do uszkodzenia nawet
gdy nie przekroczyły one doraźnej wytrzymałości struktur kostnych.
Od strony mechaniki niestabilność struktur kręgosłupa występuje wówczas, gdy małe
obciążenie powoduje duży wzrost przemieszczeń. W pojęciu klinicznym mianem
niestabilności określa się stan, w którym podczas ruchu lub już pod wpływem samych
obciążeń dochodzi do przemieszczeń względem siebie segmentów ruchowych kręgosłupa. W
tej sytuacji kręgosłup traci zdolność do zachowania prawidłowych stosunków przestrzennych
między poszczególnymi kręgami, a ich częściami, doprowadzając do ciasnoty kanału
kręgowego lub otworów międzykręgowych (co powoduje dolegliwości bólowe).
Wyszukiwarka
Podobne podstrony:
konta egzaminacyjne id 246765 Nieznany
algetra EGZAMINY id 57432 Nieznany
ephl egzamin id 162318 Nieznany
Pisma Janowe egzamin id 359103 Nieznany
egzamin 2 id 153541 Nieznany
Biotechnologia egzamin id 89038 Nieznany
chemia fizyczna egzamin id 1122 Nieznany
logika egzamin id 272077 Nieznany
Na egzamin id 312078 Nieznany
konsta egzamin1 id 246146 Nieznany
CHEMIA EGZAMIN 2 id 112139 Nieznany
Na egzamin 2 id 312084 Nieznany
ped egzamin id 353250 Nieznany
Egzamin id 151498 Nieznany
BOF egzamin id 91316 Nieznany
Egzamin SIT egzamin id 680993 Nieznany
Mechanika egzamin id 290860 Nieznany
Egzamin 2 id 151772 Nieznany
więcej podobnych podstron