
Politechnika Warszawska
Wydział Samochodów i Maszyn Roboczych
Instytut Maszyn Roboczych Ciężkich
Laboratorium Konstrukcji Nośnych
Skręcanie profili cienkościennych
Wersja robocza
Tylko dla użytku wewnętrznego SiMR PW
Opracowanie:
Artur Jankowiak
Hieronim Jakubczak
Jan Maciejewski
Warszawa 2014
Wszelkie prawa zastrzeżone
2
Ćwiczenie 2
Skręcanie profili cienkościennych
2.1 CEL ĆWICZENIA
Celem ćwiczenia jest poznanie zjawiska skręcania profili cienkościennych, które są
szeroko wykorzystywane w konstrukcjach nośnych maszyn roboczych. Elementy konstrukcji
nośnych maszyn podlegają zwykle obciążeniom przestrzennym, których efektem jest dość
często skręcanie tych elementów. Obciążenia skręcające są ważne z tego względu, że mogą
wywoływać znaczne wytężenie materiału w elementach, w zależności od sposobu ich
zamocowania i obciążenia, jak również kształtu przekroju poprzecznego.
2.2 PODSTAWY TEORETYCZNE
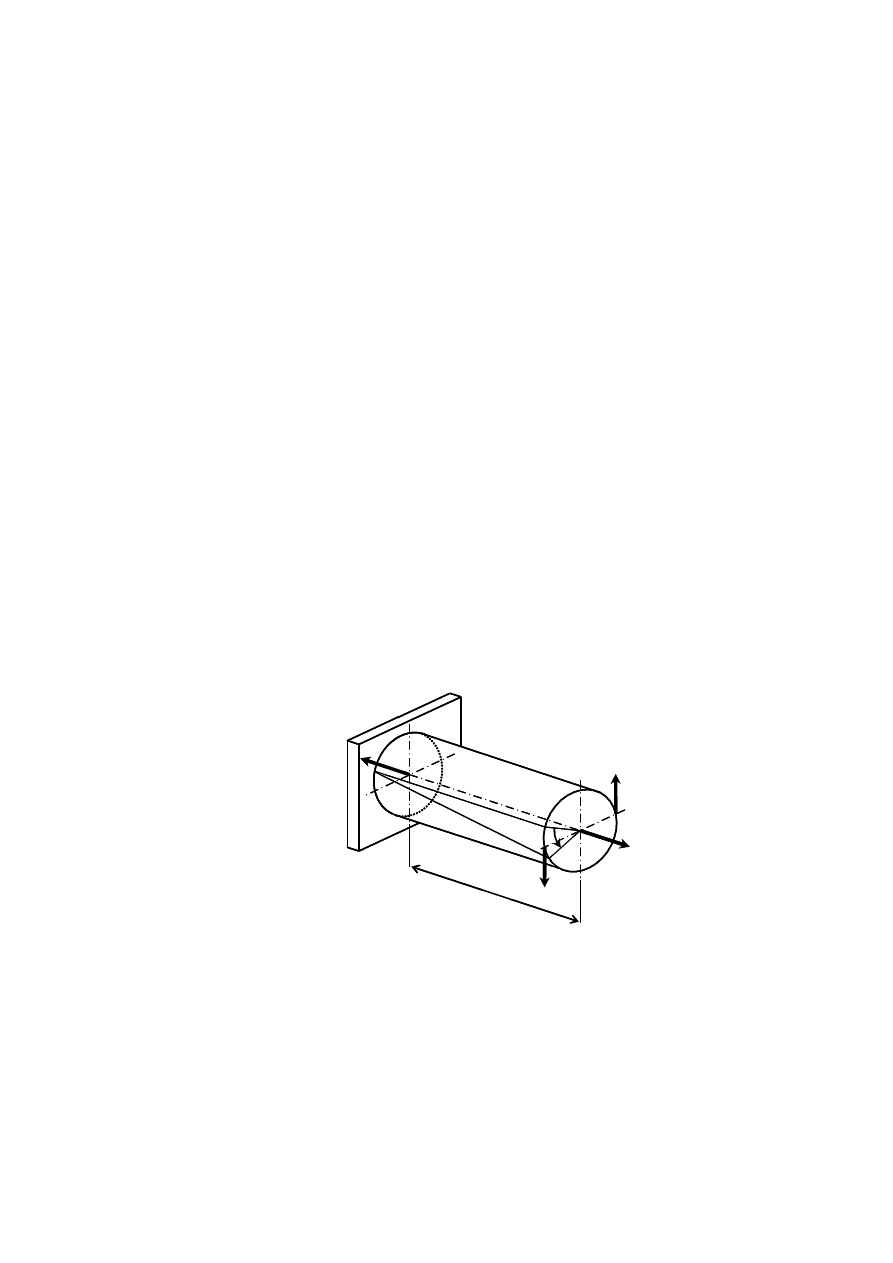
Skręcanie - wiadomości ogólne
Skręcanie jest zjawiskiem często występującym w konstrukcjach nośnych maszyn.
Rozpatrując je na przykładzie pręta o przekroju kołowym, można wyobrazić sobie parę sił F
przyłożonych do pręta w płaszczyźnie prostopadłej do osi wzdłużnej (rys. 1). Efektem tego są
siły wewnętrzne zredukowane do momentu skręcającego M.
l
F
F
M
M
φ
l
F
F
M
M
φ
Rys. 2.1 Skręcanie pręta o przekroju okrągłym
Pod działaniem momentu skręcającego przekrój kołowy, normalny do osi pręta doznaje
obrotu wokół osi zachowując swą płaskość. Takie zachowanie przekrojów cienkościennych
jest jednak słuszne tylko dla elementów o przekrojach nie podlegających zjawisku deplanacji
(o zjawisku tym będzie mowa w dalszej części opracowania).
3
Miarą odkształcenia w pręcie skręcanym jest kąt skręcenia. Jest to kąt pomiędzy dwoma
wzajemnymi przekrojami płaskimi, które obróciły się względem siebie (rys. 2.1). Jeżeli na
rozpatrywanej długości pręta M = const, G = const, I
o
= const to kąt skręcenia można
wyznaczyć ze wzoru:
o
I
G
l
M
⋅
⋅
=
ϕ
(2.1)
gdzie: M - moment skręcający, l - długość pręta, I
o
- biegunowy moment bezwładności
przekroju, G - moduł Kirchoffa, wyznaczany ze wzoru:
(
)
ν
+
⋅
=
1
2
E
G
(2.2)
gdzie: E - moduł Younga,
ν
- liczba Poissona.
Naprężenia styczne w dowolnym punkcie przekroju pręta okrągłego, obciążonego
momentem skręcającym opisane są zależnością (2.3), w której
ρ
oznacza odległość od środka
pręta do analizowanego punktu.
ρ
⋅
=
τ
o
I
M
(2.3)
Największe naprężenia styczne występują na konturze zewnętrznym przekroju, tzn. gdy
ρ
= r.
Skręcanie profili cienkościennych
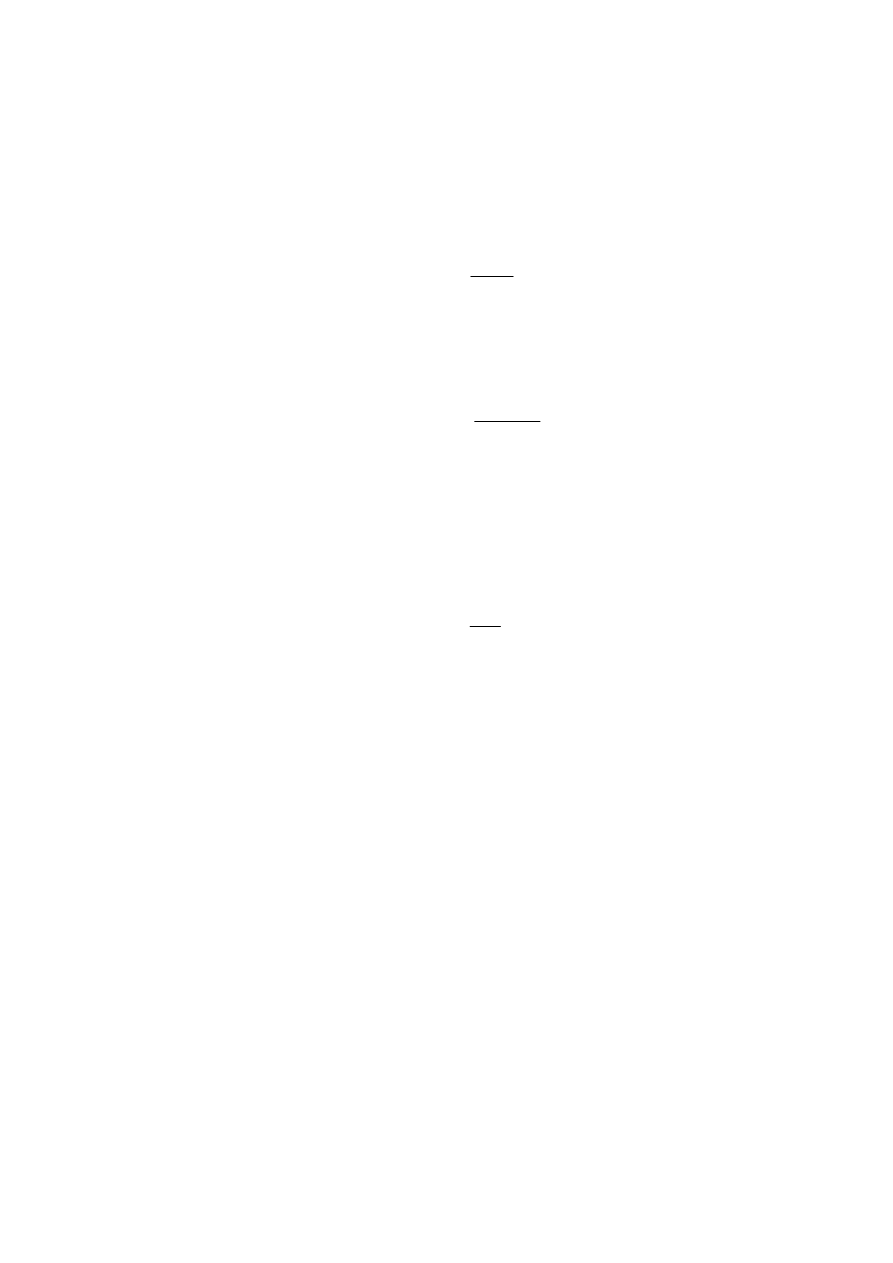
W konstrukcjach nośnych maszyn najczęściej stosuje się elementy o przekrojach
cienkościennych. Przykład takiego pręta o przekroju kołowym otwartym przedstawia rys.
2.2a. Podczas skręcania takich przekrojów może wystąpić zjawisko deplanacji (paczenia)
przekroju, objawiające się tym, że przekrój płaski po obciążeniu momentem skręcającym
przestaje być płaski (przekroje odkształcają się w kierunku osiowym), rys. 2.2b.
Ze względu na deplanację przekroju i jej ograniczenie, rozróżnia się skręcanie swobodne
i nieswobodne. Skręcanie swobodne występuje wtedy, gdy deplanacja przekroju pręta nie jest
ograniczana na całej długości pręta, np. przez sposób zamocowania pręta lub żebra
poprzeczne w pręcie, rys. 2.2b. Z powyższej definicji wynika, że przekroje nie ulegające
deplanacji są skręcane w sposób swobodny, niezależnie od sposobu utwierdzenia pręta.
W prętach skręcanych swobodnie występują tylko naprężenia styczne.
4
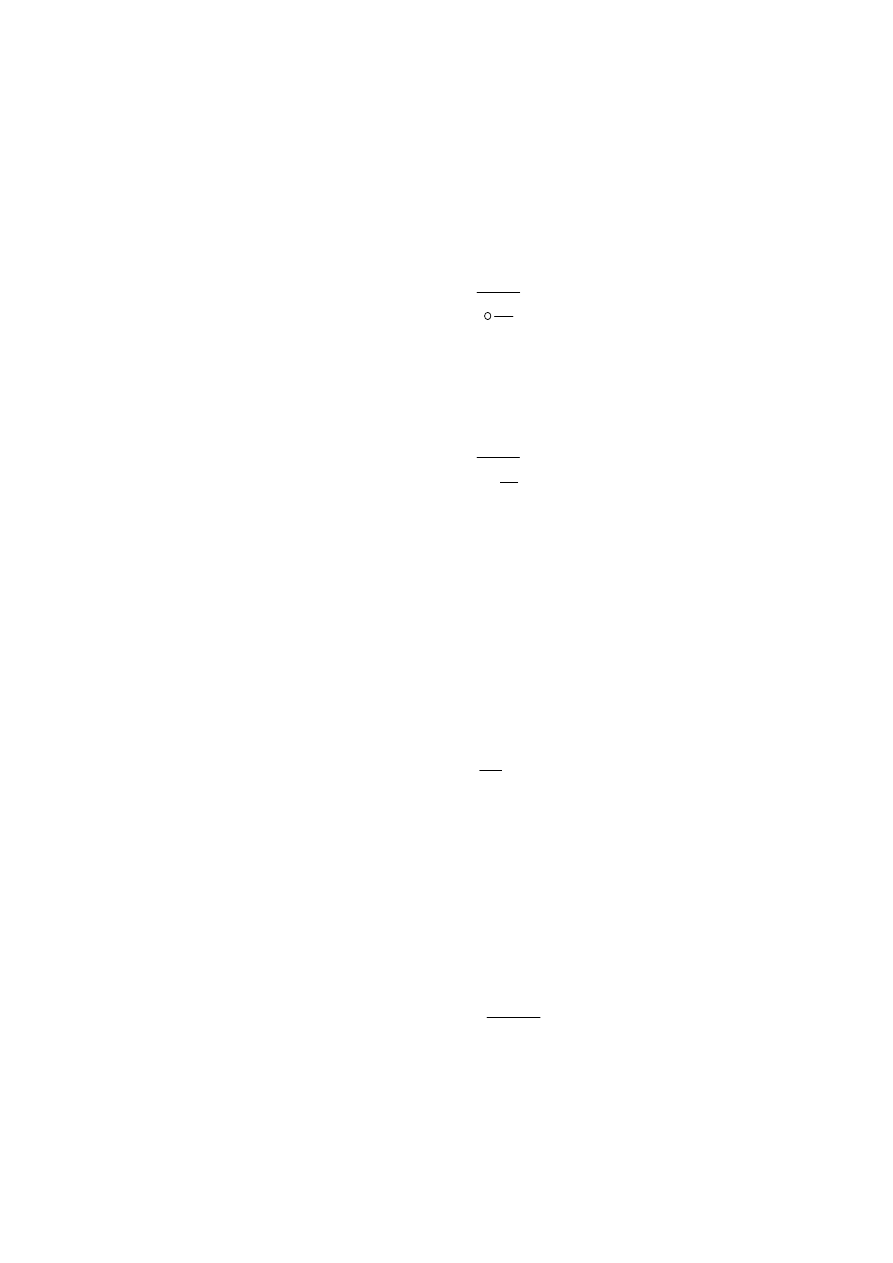
Przy skręcaniu nieswobodnym istnieją przyczyny nie pozwalające na swobodną
deplanację przekrojów pręta, jak np. przyspawanie pręta do płyty (rys. 2.2c). Skutkiem tego
ograniczenia część ‘wzdłużnych włókien’ pręta powyżej linii przecięcia konturu przekroju z
rys. 2.2c zostanie skrócona, zaś włókna poniżej przecięcia zostaną wydłużone. Efektem tego
są jest powstanie odkształceń (i naprężeń) wzdłuż osi pręta (normalnych do przekroju). Warto
zauważyć, że rozkład tych naprężeń w przekroju pręta musi być taki, aby siła normalna w
przekroju była równa zeru, bo na pręt nie działa żadna siła osiowa.
M
M
M
M
M
M
M
M
M
M
M
M
Rys. 2.2 Skręcanie swobodne (b) i nieswobodne (c)
Ze względu na deplanację i jej wpływ na efekty skręcania prętów cienkościennych,
przekroje prętów można podzielić na trzy grupy:
a) przekroje nie podlegające deplanacji (skręcane swobodnie, niezależnie od
utwierdzenia), wśród których znajdują się:
• przekroje kołowo - symetryczne, w których środek skręcania pokrywa się ze
środkiem masy,
• przekroje złożone z krzyżujących się pasów, środek skręcania tych przekrojów
leży na ich przecięciu,
• przekroje zamknięte o stałej grubości opisane na okręgu, jak profile trójkątne i
inne wielokątne foremne.
a)
b)
c)
5
b) przekroje ulegające deplanacji w niewielkim stopniu, dla których zastosowanie
modelu skręcania swobodnego daje zadowalające przybliżenie,
c) przekroje podlegające deplanacji, dla których konieczne jest uwzględnienie tego
zjawiska.
Należy tu podkreślić, że deplanacja przekroju ma wpływ jedynie na wartości naprężeń
w pręcie przy skręcaniu nieswobodnym. Przy skręcaniu swobodnym to zjawisko nie jest
w ogóle brane pod uwagę.
Do obliczania kąta skręcenia profili cienkościennych o przekroju otwartym jak
i zamkniętym można wykorzystać wzór (2.1). Biegunowy moment bezwładności przekroju,
I
o
, powinien jednak zostać zastąpiony wskaźnikiem sztywności przekroju na skręcanie, I
s
,
który jest nazywany również biegunowym momentem bezwładności przekroju
cienkościennego, chociaż w ogólności nie jest obliczany tak, jak moment bezwładności.
a)
b)
c)
S
4
S
1
S
2
S
3
δ
2
δ
1
δ
4
δ
3
δ
2
δ
1
h
1
h
2
δ
3
h
3
δ
3
δ
1
h
1
h
3
h
2
δ
2
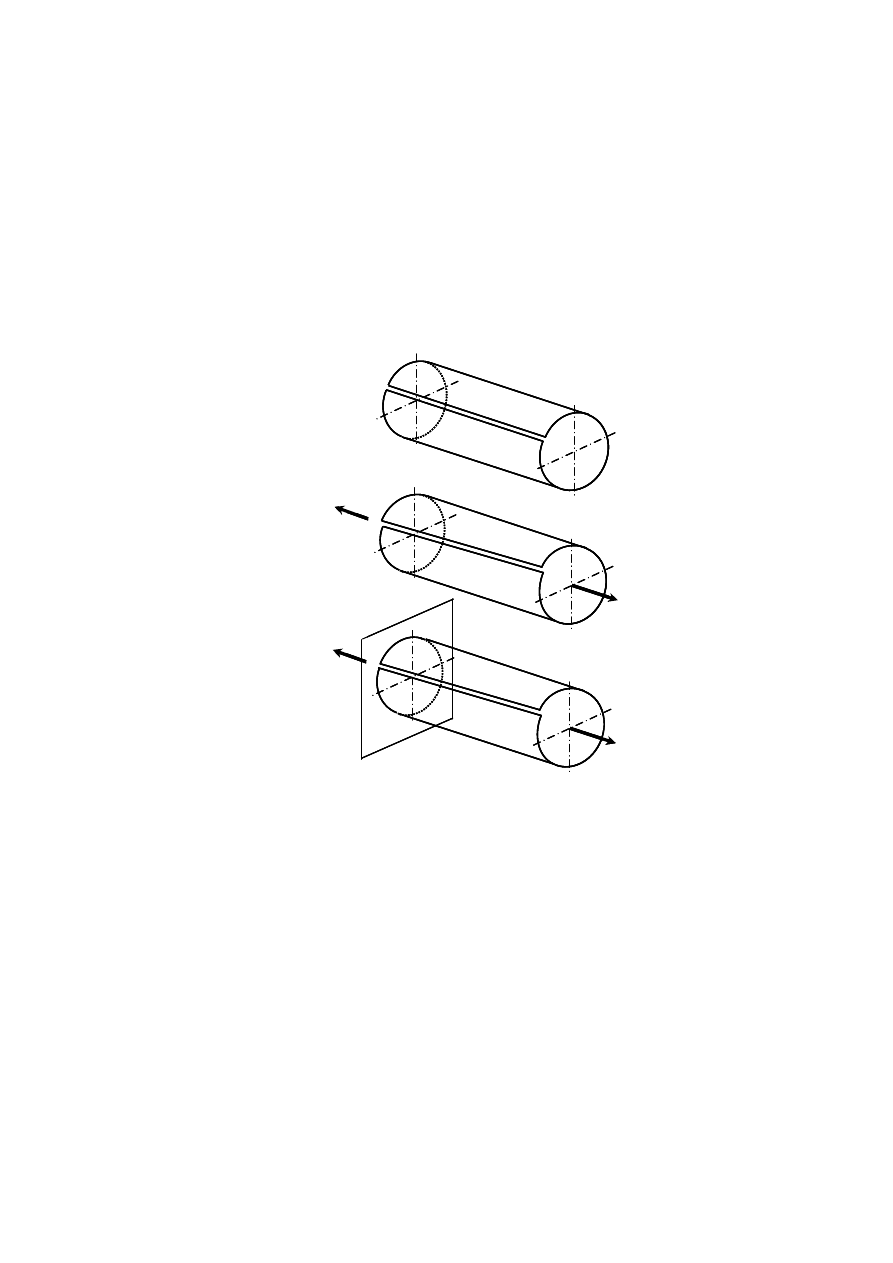
Rys. 2.3 Profile o przekroju zamkniętym (a) oraz otwartym (b) i (c).
W przypadku profili o przekroju otwartym, wartość I
s
oblicza się jako sumę wskaźników,
I
si
, poszczególnych odcinków (części składowych) przekroju.
3
1
3
1
i
n
i
i
S
h
I
δ
⋅
⋅
⋅
α
=
∑
=
(2.4)
gdzie: h
i
i
δ
i
- długość i szerokość i - tego prostokąta.
Dodatkowy współczynnik poprawkowy
α
uwzględnia kształt przekroju cienkościennego.
Poniżej przedstawiono jego wartość dla kilku podstawowych profili.
Kątownik
α
= 1.00
Walcowany dwuteownik
α
= 1.20
6
Walcowany ceownik
α
= 1.12
Spawany dwuteownik
α
= 1.50
W przypadku profili o przekroju zamkniętym wskaźnik sztywności przekroju na
skręcanie opisywany jest wzorem:
∫
δ
⋅
=
ds
A
I
o
S
2
4
(2.5)
Dla profili o zarysie odcinkowo prostoliniowym o stałych grubościach całkę we wzorze
możemy zamienić na sumę, a mianowicie
∑
=
δ
⋅
=
n
i
i
i
o
S
s
A
I
1
2
4
(2.6)
gdzie: A
o
- pole powierzchni ograniczone linią środkową ścianki, zaś s
i
i
δ
i
– to długość
i grubość i - tego odcinka ścianki przekroju pręta zamkniętego.
Skręcanie swobodne profili o przekroju otwartym i zamkniętym
Naprężenia styczne przy skręcaniu swobodnym prętów wyznacza się z następujących
wzorów:
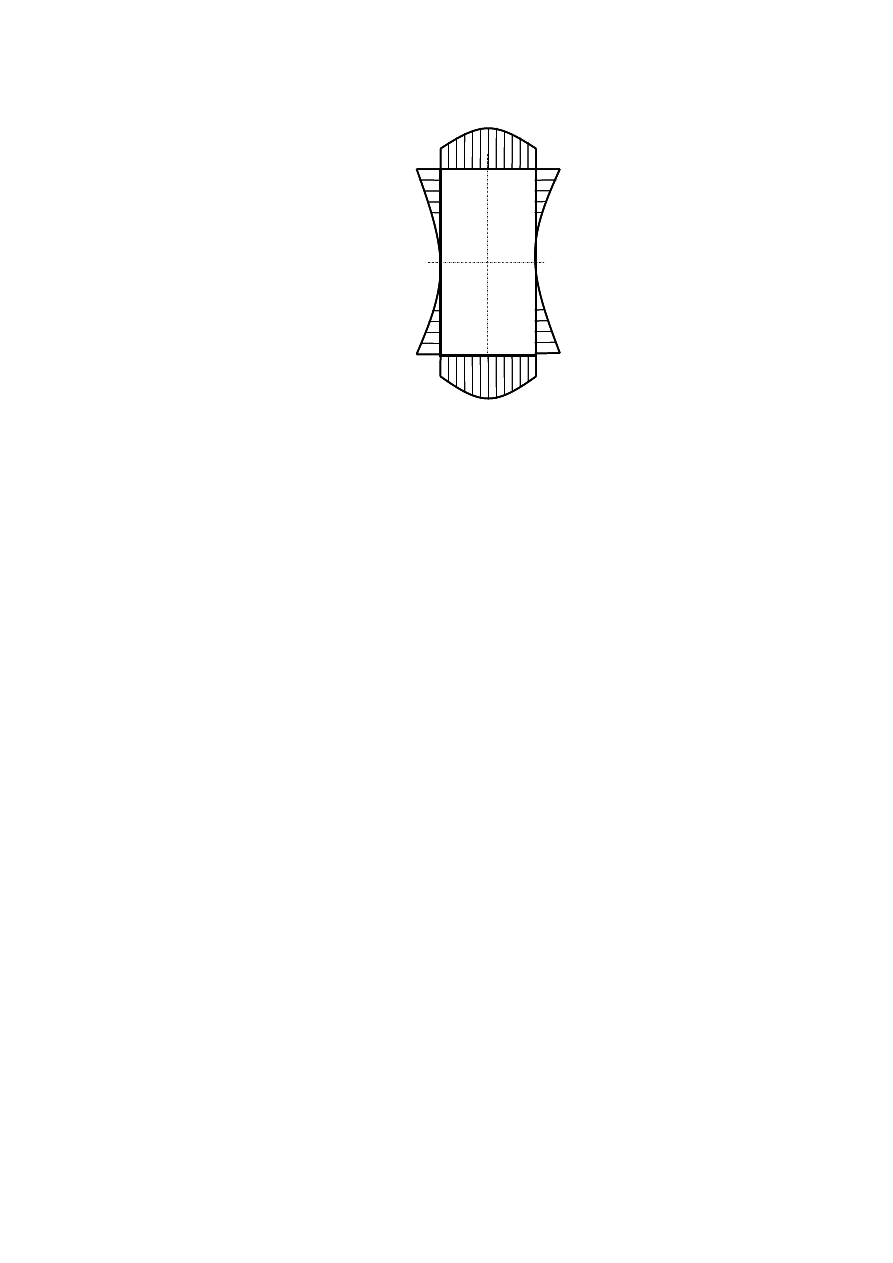
• Dla profili o przekrojach otwartych:
δ
⋅
=
τ
S
S
I
M
(2.7)
gdzie
δ
oznacza grubość ścianki. Naprężenia styczne osiągają największe wartości na
powierzchni swobodnej przekroju (rys. 2.4a).
• Dla profili o przekrojach zamkniętych naprężenia styczne przy skręcaniu swobodnym
określa się ze wzoru Breda (2.8), a ich rozkład wzdłuż grubości jest równomierny, rys.
2.4b. Dla profili zamkniętych obowiązuje zależność
.
const
i
Si
=
δ
τ
δ
⋅
=
τ
o
s
A
M
2
(2.8)
Warto zwrócić uwagę, że w przekrojach otwartych największa wartość naprężeń
stycznych występuje przy największej, zaś w przekrojach zamkniętych – przy najmniejszej
grubości ścianki.
7
a)
b)
Rys. 2.4 Rozkład naprężeń stycznych skręcania swobodnego
Skręcanie nieswobodne profili otwartych i zamkniętych
Obliczanie naprężeń w prętach przy skręcaniu nieswobodnym jest o wiele bardziej
złożone niż w przypadku skręcania swobodnego. Wymaga to bowiem wyznaczenia wartości
dodatkowych sił wewnętrznych w analizowanych przekrojach pręta (moment skręcania
swobodnego i giętno-skrętnego oraz bimomentu), które są efektem nie tylko sposobu
obciążenia pręta, ale również jego zamocowania oraz kształtu i wymiarów przekroju
poprzecznego. W pierwszej kolejności należy jednak wyznaczyć środek skręcania przekroju
pręta oraz dodatkowe charakterystyki przekroju.
Wyznaczanie środka skręcania
Środek skręcania jest punktem (w przekroju poprzecznym), wokół którego odbywa się
względny obrót sąsiednich przekrojów pręta. Środek skręcania pokrywa się ze środkiem
ścinania [3]. Warto pamiętać, że siły poprzeczne przechodzące przez środek ścinania nie
wywołują skręcania pręta. W przypadku przekrojów posiadających oś symetrii - środek
skręcania znajduje się zawsze na tej osi.
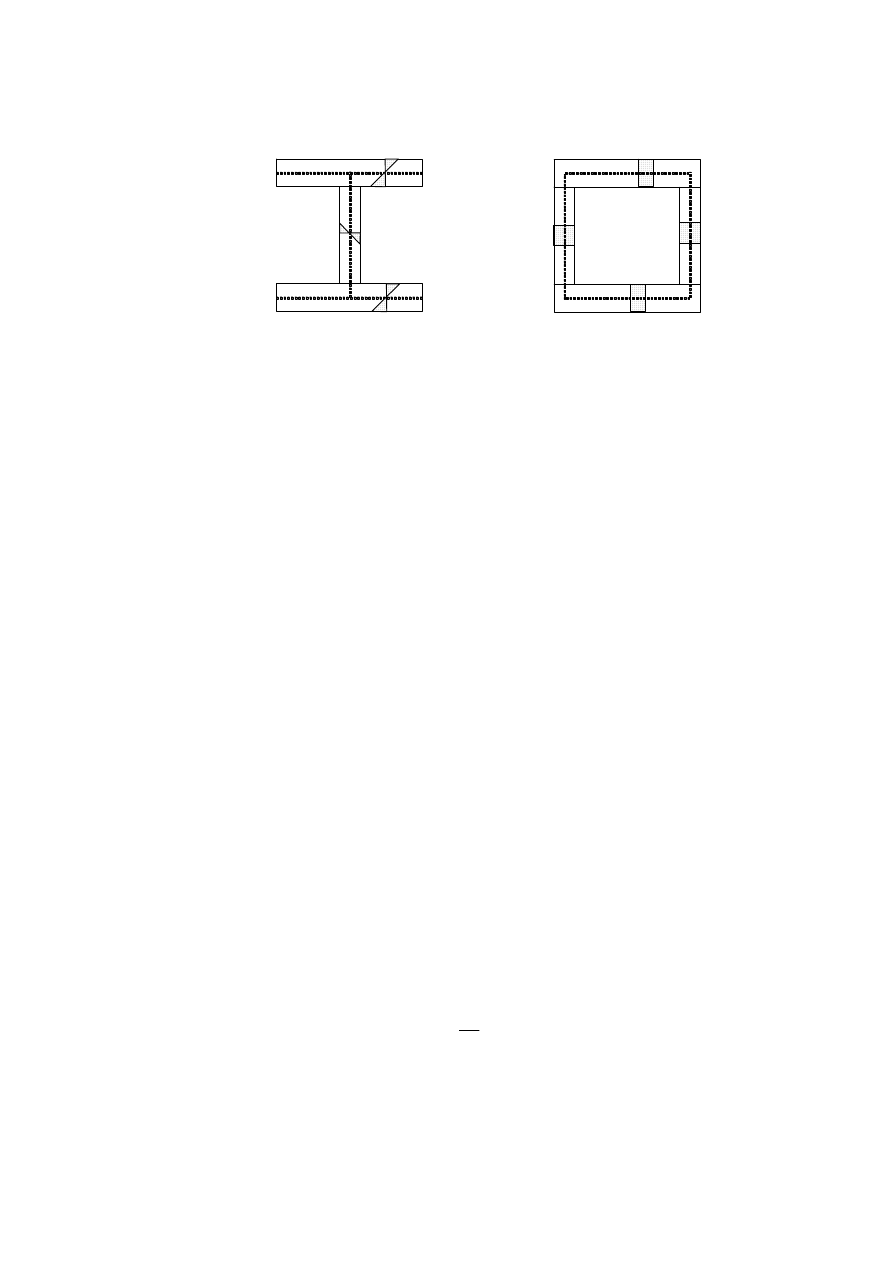
Wyznaczenie środka skręcania jest niezbędne dla określenia deplanacji przekroju, której
miarą jest powierzchnia wycinkowa
ω
(powierzchnia wycinkowa pokazuje sposób paczenia
przekroju przy skręcaniu). Powierzchnią wycinkową (lub współrzędną wycinkową) punktu N
krzywej s względem bieguna B, nazywamy wyrażenie
( )
∫
⋅
=
MN
ds
s
h
ω
(2.9)
gdzie h(s) jest zmienną odległością bieguna B od stycznej do krzywej s, a punkt M wyznacza
początek sumowania, w którym
ω
= 0, rys. 2.5a. Powierzchnia wycinkowa przyjmuje
wartości dodatnie gdy promień wodzący BM obraca się zgodnie z ruchem zegara. Całka we
8
wzorze (2.9) równa jest podwojonemu polu powierzchni ograniczonej odcinkiem łuku
konturu MN oraz prostymi BM i BN.
Położenie bieguna B można przyjmować w dowolnym miejscu, ale wówczas nie
odzwierciedla rzeczywistej deplanacji przekroju. Na rys. 2.5c przedstawiono przykład
powierzchni wycinkowej względem punktu B dla przekroju ceowego. Położenie punktu
zerowego początku całkowania M wyznaczamy z warunku zerowania statycznego momentu
wycinkowego:
0
=
⋅
=
∫
Ac
c
dA
S
ω
ω
(2.10)
Dla przekrojów posiadających oś symetrii (np. przekrój ceowy) początek całkowania leży
na przecięciu osi symetrii z profilem.
B
M
N
h(s)
ss
s=0
K
L
c
b
z
y
δ
δ
δ
B
S
y
y
M
M
α
y
c
2 (b+
α
y
)
c
2
α
y
c
2
-
α
y
c
2(
-
α
y
-b)
c
2
-b
c
2
b
z
z
y
S
d)
c)
b)
a)
y
y
y
B
B
B
B
B
M
N
h(s)
ss
s=0
K
L
c
b
z
y
δ
δ
δ
B
S
y
y
M
M
α
y
c
2 (b+
α
y
)
c
2
α
y
c
2
-
α
y
c
2(
-
α
y
-b)
c
2
-b
c
2
b
z
z
y
S
d)
c)
b)
a)
y
y
y
B
B
B
B
Rys. 2.5 Sposób wyznaczania środka skręcania.
Rzeczywistą deplanację przekroju obrazuje główna powierzchnia wycinkowa, która jest
wyznaczana względem środka skręcania S. Położenie środka skręcania, S dowolnego
przekroju (współrzędne y
S
, z
S
) wyznacza się na podstawie powierzchni wycinkowej
ω
B
,
wyznaczonej względem dowolnie wybranego punktu, B (o znanym położeniu y
B
, z
B
):
y
By
B
S
y
I
I
y
y
ω
−
=
−
=
α
(2.11)
z
Bz
B
S
Z
I
I
z
z
ω
=
−
=
α
(2.12)
gdzie: y, z - główne osie bezwładności, I
y
, I
z
– momenty bezwładności przekroju względem
osi y i z, y
B
, z
B
- położenie dowolnego punktu B względem układu współrzędnych.
9
Parametry
α
y
i
α
z
wyznaczają przesunięcie środka skręcania względem punktu B, przy
czym wartości dodatnie oznaczają przesunięcie zgodne z kierunkiem osi, natomiast wartości
ujemne – przesunięcie w stronę przeciwną (jak
α
y
na rys. 2.5d). Z tego względu przy
wyznaczaniu głównej powierzchni wycinkowej (rys. 2.5d) należy uwzględnić znak tego
parametru.
Wycinkowo - liniowe momenty względem osi y i z wynoszą odpowiednio:
zdA
I
B
By
∫
ω
=
ω
(2.13)
ydA
I
B
Bz
∫
ω
=
ω
(2.14)
gdzie: A - pole przekroju pręta, ω
B
- powierzchnia wycinkowa względem dowolnie
wybranego punktu B.
Poniższy tok postępowania jest podobny dla profili otwartych i zamkniętych.
W przypadku przekrojów zamkniętych należy się posługiwać tzw. uogólnioną powierzchnią
wycinkową,
ωˆ
. Pełniejsze informacje dotyczące wyznaczania środka skręcania dla
przekrojów otwartych i zamkniętych są zawarte w pracy [1].
Wyznaczanie charakterystyk geometrycznych przekroju
Istotnym problemem do rozwiązania jest tu określenie powierzchni wycinkowych dla
danego przekroju. Przykładowe wykresy powierzchni wycinkowych dla profili stosowanych
w ćwiczeniu pokazane zostaną w części dotyczącej wykonania ćwiczenia.
Wycinkowy moment bezwładności obliczany jest ze wzoru:
dA
I
A
∫
ω
=
ω
2
(2.15)
Wycinkowy moment statyczny dla dowolnego punktu przekroju oblicza się
uwzględniając jedynie część przekroju A
c
od początku konturu:
∫
⋅
=
Ac
c
dA
S
ω
ω
(2.16)
Oznacza to, że w każdym punkcie początkowym (i końcowym) konturu wartość
wycinkowego momentu bezwładności jest równa zero.
10
Wyznaczanie sił wewnętrznych
Przy skręcaniu nieswobodnym w przekroju pręta cienkościennego, którego przekrój
ulega deplanacji, pojawiają się dodatkowe naprężenia styczne, równomiernie rozłożone po
grubości ścianki. Stąd całkowity moment skręcający M dzieli się na moment skręcania
swobodnego M
S
i moment giętno-skrętny M
ω
.
ω
M
M
M
S
+
=
(2.17)
Wartości momentów M
s
i M
ω
, wyznaczane są z równań różniczkowych kąta skręcenia
pręta:
'
s
S
I
G
M
ϕ
⋅
⋅
=
(2.18)
oraz
''
'
I
E
M
ϕ
⋅
⋅
⋅
μ
−
=
ω
1
1
(2.19)
gdzie: I
1
= I
ω
dla profilu otwartego i I
1
=
ω
ˆ
I dla profilu zamkniętego. I
ω
oraz
ω
ˆ
I to główne
wycinkowe momenty bezwładności przekroju cienkościennego otwartego i zamkniętego.
Zatem:
'
s
''
'
I
G
I
E
M
ϕ
⋅
⋅
+
ϕ
⋅
⋅
⋅
μ
−
=
1
1
(2.20)
Przy skręcaniu nieswobodnym należy uwzględnić również bimoment B, który wyraża się
wzorem:
''
I
E
B
ϕ
⋅
⋅
⋅
μ
−
=
1
1
(2.21)
W powyższych wzorach μ oznacza współczynnik spaczenia przekroju (μ = 1 dla
przekrojów otwartych oraz dla przekrojów zamkniętych, które nie ulegają deplanacji):
p
S
I
I
−
=
μ 1
(2.22)
dla przekroju zamkniętego, gdzie I
p
jest kierunkowym momentem bezwładności przekroju,
obliczanym ze wzoru:
∫
⋅
δ
=
ds
h
I
p
2
(2.23)
gdzie h jest odległością od środka skręcania do odcinka ds konturu przekroju.
11
Po zróżniczkowaniu równanie (2.20) przybiera postać::
( )
( )
x
I
G
x
I
E
dx
dM
II
s
IV
ϕ
⋅
⋅
+
ϕ
⋅
⋅
⋅
μ
−
=
1
1
(2.24)
Przy założeniu stałości momentu obciążającego pręt wzdłuż jego długości, równanie kąta
skręcenia można przekształcić do postaci obowiązującej zarówno dla przekrojów otwartych
oraz zamkniętych:
( )
0
2
=
ϕ
⋅
−
ϕ
II
IV
k
x
(2.25)
gdzie k - współczynnik giętno-skrętny pręta cienkościennego:
1
I
E
I
G
k
s
⋅
⋅
⋅
μ
=
.
(2.26)
Rozwiązanie równania różniczkowego (2.18) pręta skręcanego, z uwzględnieniem
warunków brzegowych, wynikających z jego zamocowania i obciążenia, umożliwia
wyznaczenie sił wewnętrznych M
s
, M
ω
oraz B w każdym przekroju pręta.
Wyznaczanie naprężeń
Znając siły wewnętrzne (B, M
S
, M
ω
) i charakterystyki przekrojów możemy wyznaczyć
naprężenia panujące w przekroju pręta.
Naprężenia styczne St. Venanta (wywołane momentem M
s
) oblicza się tak, jak przy
skręcaniu swobodnym, ze wzorów (2.7) i (2.8) odpowiednio dla przekrojów otwartych
i zamkniętych.
a) Przekroje otwarte
• naprężenia normalne wycinkowe (otrzymane w wyniku deplanacji):
ω
⋅
=
σ
ω
ω
I
B
(2.27)
• naprężenia styczne wycinkowe (powstałe na skutek nierównomiernego rozkładu
naprężeń normalnych):
δ
⋅
⋅
−
=
τ
ω
ω
ω
ω
I
S
M
c
(2.28)
b) Przekroje zamknięte
• naprężenia normalne wycinkowe (otrzymane w wyniku deplanacji):
12
ω
⋅
=
σ
ω
ω
ˆ
I
B
ˆ
ˆ
(2.29)
• naprężenia styczne wycinkowe (zmienne wzdłuż konturu, analogiczne do przekrojów
otwartych):
δ
⋅
⋅
−
=
τ
ω
ω
ω
ω
ˆ
ˆ
ˆ
ˆ
I
S
M
(2.30)
Wyznaczenie tych naprężeń stycznych jest bardzo złożone i jest szczegółowo opisane w
pracy [1].
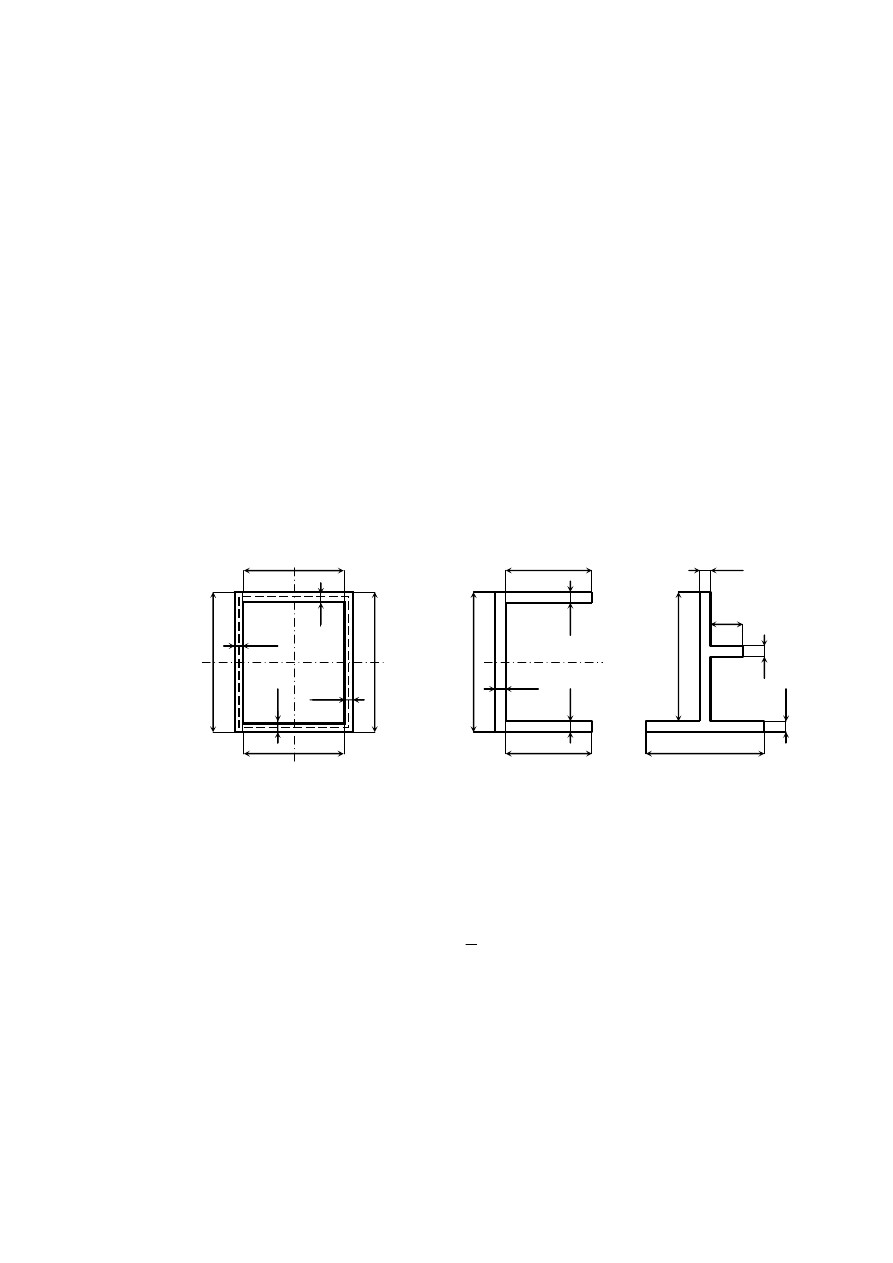
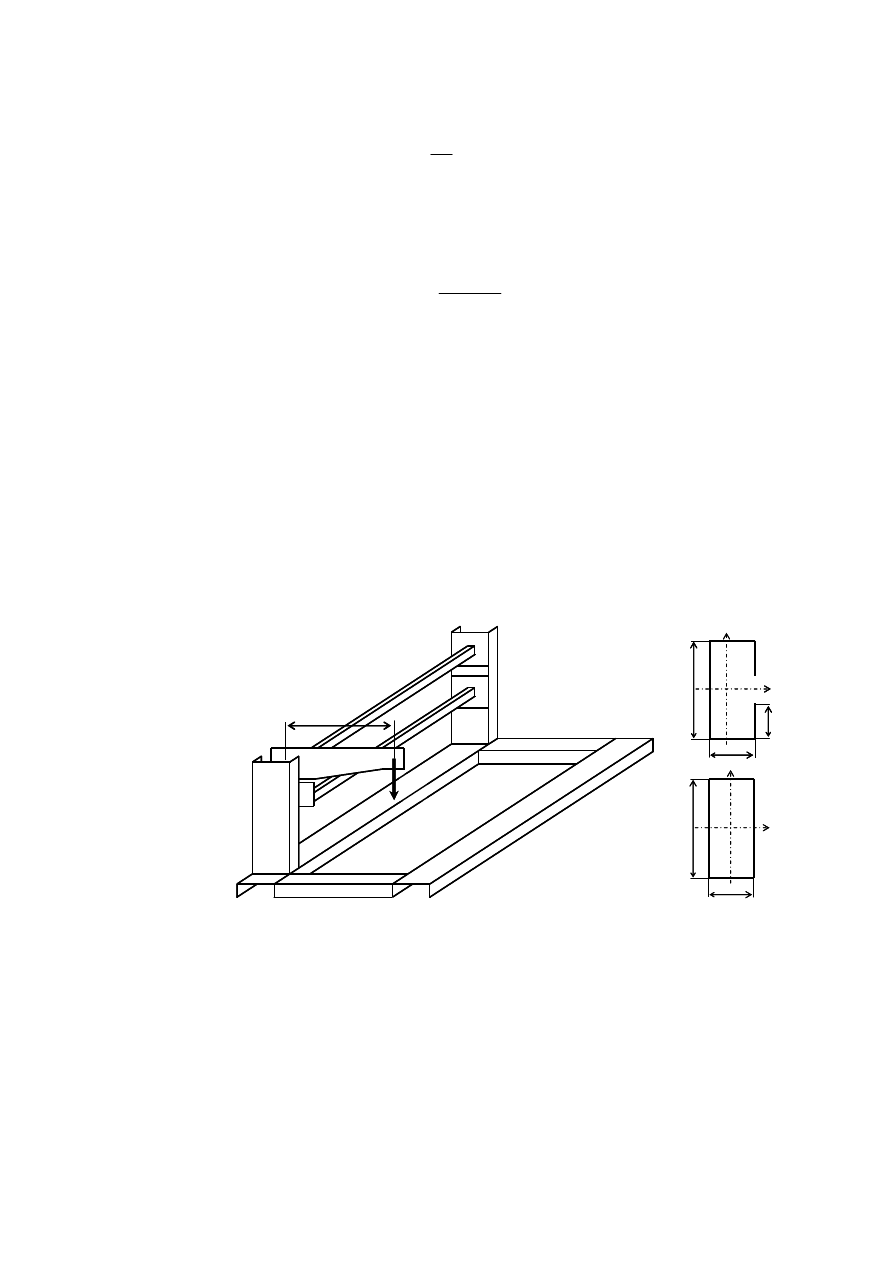
2.3 STANOWISKO BADAWCZE
W ćwiczeniu dostępne są dwa rodzaje profili - profil zamknięty i profil otwarty (rys. 2.7).
Stanowisko badawcze jest wykonane w taki sposób, aby pozwolić na obciążenie tych
elementów momentem skręcającym. Moment skręcający uzyskujemy przykładając obciążenie
P do ramienia a o maksymalnej długości 500 mm. Zarówno przykładaną siłę jak i ramię jej
działania można zmieniać, czego efektem będzie zmiana momentu skręcającego.
P
a
P
a
b
h
b
h
b
h
a
b
h
a
b
h
a
Rys. 2.7 Stanowisko badawcze oraz przekroje prętów
Pomiaru kąta skręcenia dokonuje się pośrednio mierząc wielkość przesunięcia punktu
odniesienia od położenia zerowego do położenia po obciążeniu.
Do wyznaczenia naprężeń w wybranych przekrojach badanych elementów zastosowano
tensometry, pozwalające uzyskać wartości odkształceń w danych kierunkach. Składowe
naprężeń dla płaskiego stanu naprężenia wyznacza się wykorzystując uogólnione prawo
Hooke’a.
13
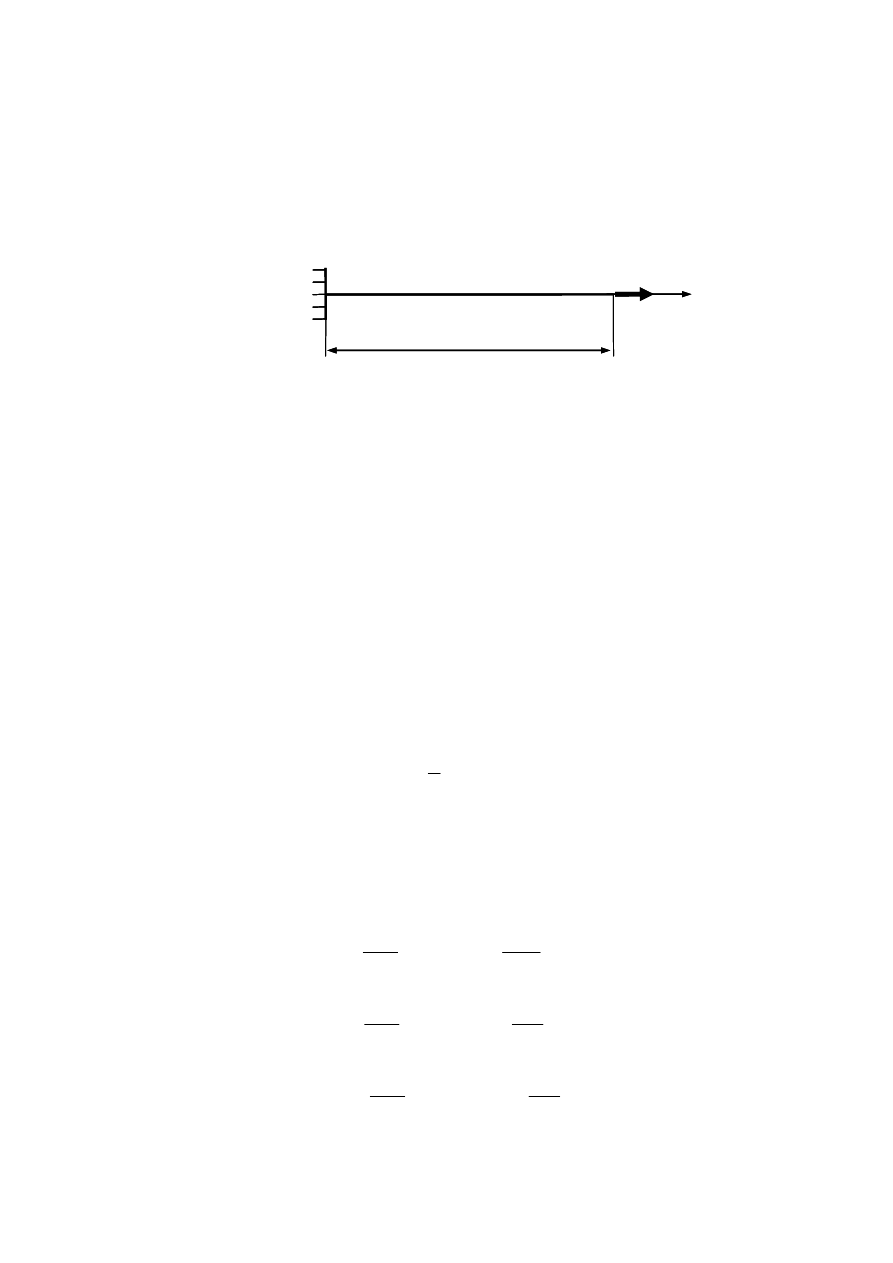
Model obliczeniowy
Model pręta z wyszczególnieniem warunków brzegowych przedstawia rys. 2.8.
x
M
ϕ
(0) = 0
ϕ
’(0) = 0
B(0)
≠ 0
x
l
M
ϕ
”(l) = 0
B(l) = 0
x
M
ϕ
(0) = 0
ϕ
’(0) = 0
B(0)
≠ 0
x
l
M
ϕ
”(l) = 0
B(l) = 0
Rys. 2.8 Warunki brzegowe do wyznaczenia sił wewnętrznych
Ze względu na to, że moment skręcający, obciążający pręt w stanowisku badawczym jest
stały wzdłuż jego długości można posłużyć się równaniem (2.25). Rozwiązanie ogólne
równania różniczkowego można zapisać w następujący sposób:
4
3
2
1
A
x
A
kx
cosh
A
kx
sinh
A
+
+
+
=
ϕ
(2.31)
Wartości stałych A
i
wyznaczymy z warunków brzegowych, podanych na rysunku 2.8,
a mianowicie:
• kąt skręcenia w miejscu zamocowania ϕ(0) = 0
• naprężenia normalne na brzegu swobodnym:
( )
( )
( )
0
0
0
=
ϕ
⇒
=
⇒
=
σ
ω
ω
l
"
l
B
l
• Moment skręcający równy jest M
M
)
l
(
I
G
)
l
(
I
E
M
)
l
(
M
S
=
ϕ′
⋅
⋅
+
ϕ ′′′
⋅
⋅
⋅
μ
−
⇒
=
ω
1
(2.32)
• W miejscu zamocowania znika moment skręcania swobodnego
0
0
0
0
=
ϕ
⇒
=
)
(
'
)
(
M
S
Uwzględniając warunki brzegowe, rozwiązanie tego równania przedstawia się
następująco:
(
)
(
)
kx
sinh
kx
kGI
M
kx
cosh
GI
B
s
s
O
−
μ
+
−
μ
=
ϕ
1
(2.33)
(
)
(
)
kx
cosh
GI
M
kx
sinh
k
GI
B
'
s
s
O
−
μ
+
−
⋅
μ
=
ϕ
1
(2.34)
(
)
(
)
kx
sinh
k
GI
M
kx
cosh
k
GI
B
''
s
s
O
−
⋅
μ
+
−
⋅
μ
=
ϕ
2
(2.35)
14
(
)
(
)
kx
cosh
k
kGI
M
kx
sinh
k
GI
B
''
'
s
s
O
−
⋅
μ
+
−
⋅
μ
=
ϕ
2
3
(2.36)
Korzystając z faktu, że pochodna kąta φ”(l) = 0, z równania (2.35) można określić jedyną
niewiadomą wielkość w powyższych równaniach - bimoment B
o
w miejscu zamocowania
pręta:
kl
tgh
k
M
B
O
⋅
−
=
(2.37)
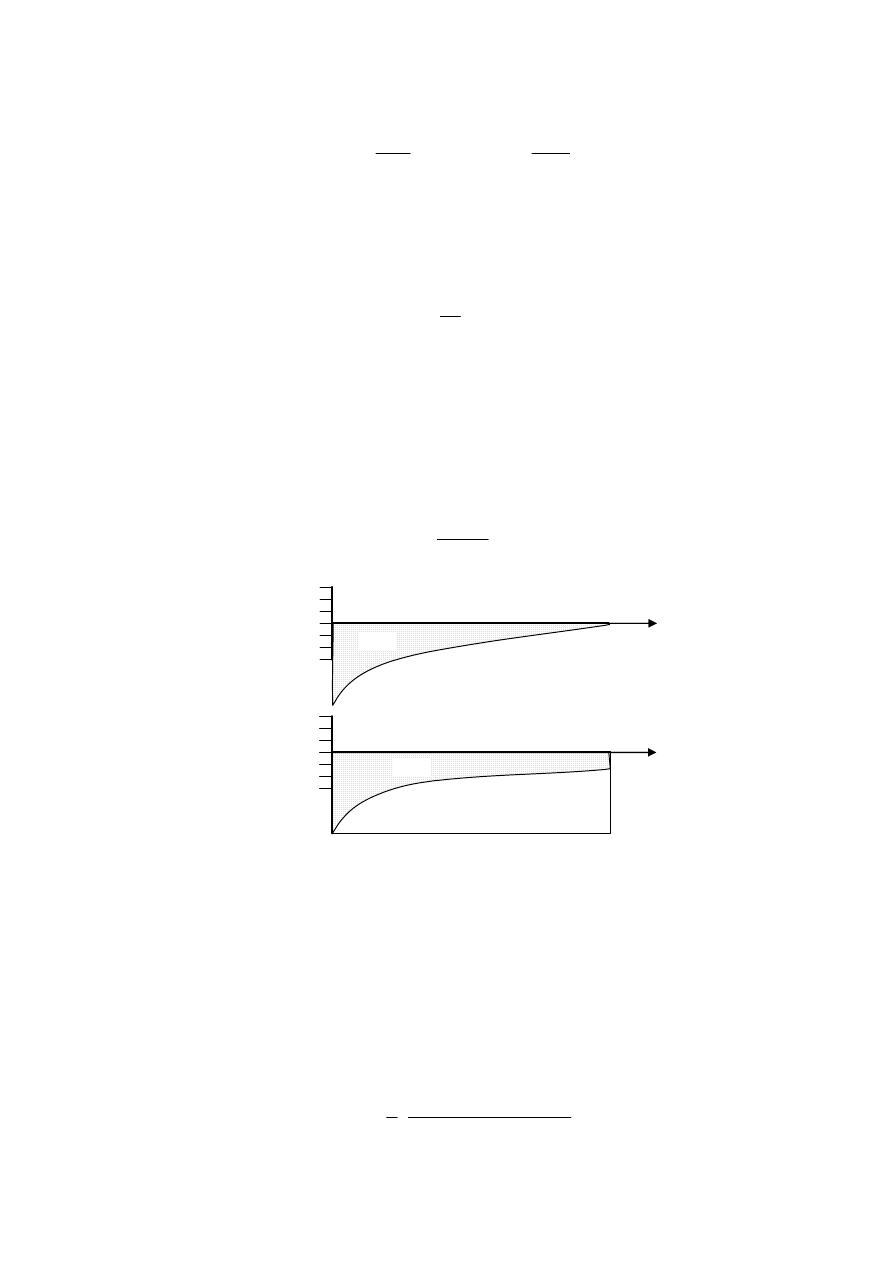
Znając rozwiązanie kąta skręcenia pręta, siły wewnętrzne
B, M
S
i
M
ω
oraz ich przebiegi
w funkcji długości pręta można wyznaczyć odpowiednio ze wzorów (2.35), (2.34) i (2.36). Są
one przedstawione na rys. 2.9. Warto zwrócić uwagę, że moment giętno-skrętny
M
ω
na końcu
swobodnym ma wartość podaną wzorem (2.38), co oznacza, że przy małych wartościach
kl na
końcu pręta występuje moment skręcania swobodnego oraz moment giętno-skrętny.
kl
cosh
M
M
l
=
ω
(2.38)
x
x
M
ω
(x)
B (x)
M
S
(x)
Rys. 2.9 Zmiana sił wewnętrznych
B, M
S
i
M
ω
wzdłuż długości pręta
Charakterystyki geometryczne przekrojów występujących w ćwiczeniu
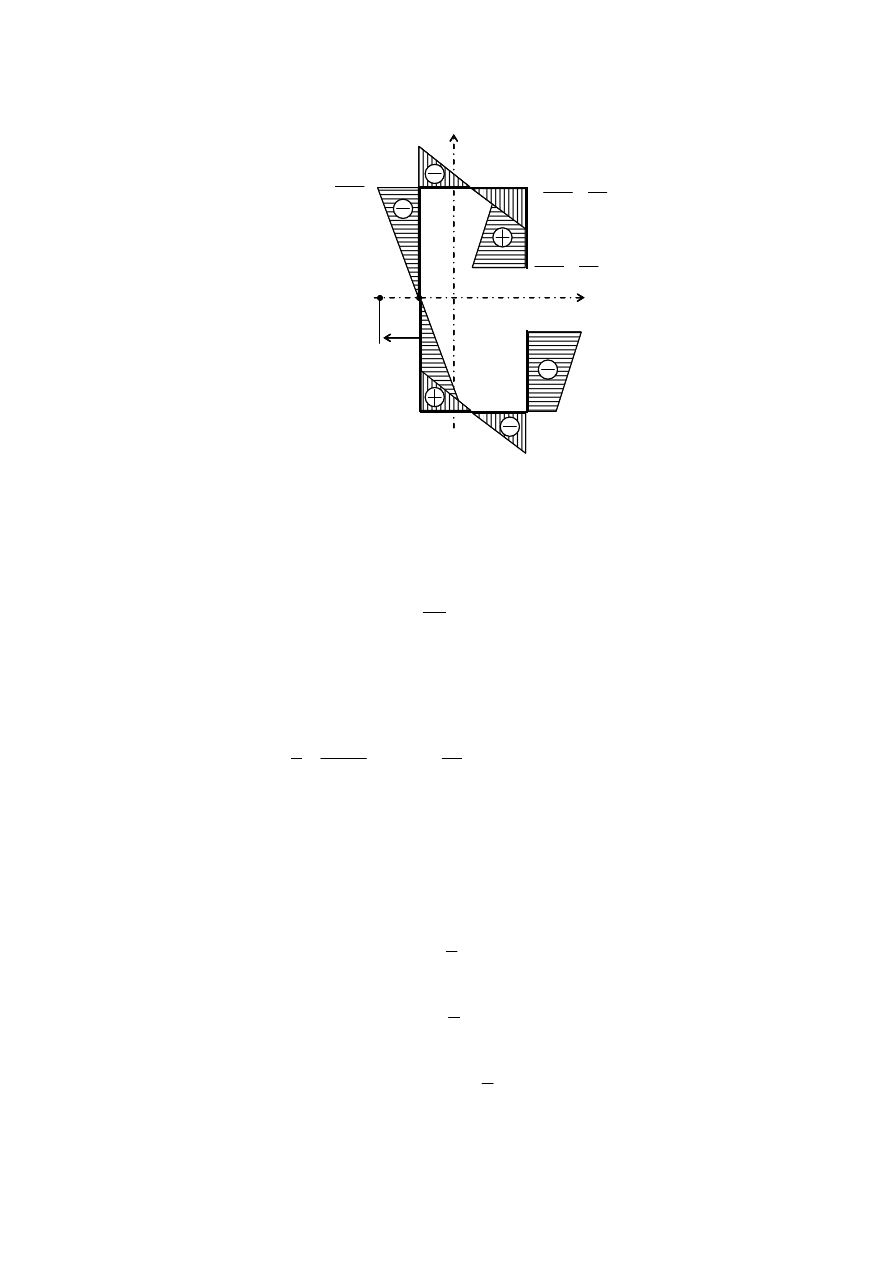
Charakterystyki geometryczne dla przekroju otwartego wyznaczono na podstawie
wykresu powierzchni wycinkowej, przedstawionego na rys. 2.10.
Położenie punktu
S względem B wskazuje, że wartość
α
y
< 0, bowiem jego wartość
wynosi (wartość
h
*
=
h/2 -2/3a):
(
)
3
2
3
2
2
2
2
6
2
4
3
a
h
bh
h
h
a
ah
bh
b
*
y
−
−
+
+
+
⋅
−
=
α
(2.39)
15
1
z
B
S
α
y
y
2
3
5
6
3
4
7
8
9
2
h
y
α
2
2
bh
h
y
+
α
(
)
y
y
b
a
bh
h
α
−
+
+
α
2
2
1
z
B
S
α
y
y
2
3
5
6
3
4
7
8
9
2
h
y
α
2
2
bh
h
y
+
α
(
)
y
y
b
a
bh
h
α
−
+
+
α
2
2
Rys. 2.10 Powierzchnia wycinkowa dla przekroju otwartego
• Wskaźnik sztywności na skręcanie dla przekroju otwartego, obliczany ze wzoru (2.4),
przedstawia się następująco:
(
)
3
2
2
3
2
1
δ
⋅
+
+
⋅
=
a
h
b
.
I
S
(2.40)
• Główny wycinkowy moment bezwładności dla przekroju otwartego o powierzchni
wycinkowej z rys. 2.10 oblicza się ze wzoru:
(
)
(
)
(
)
(
)
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
α
−
⋅
+
α
+
⋅
+
α
+
+
α
−
α
⋅
δ
=
ω
2
3
2
2
3
2
2
2
2
3
2
6
2
y
y
y
y
b
a
b
ah
b
h
h
h
I
(2.41)
• Wycinkowy moment statyczny wyznacza się w charakterystycznych punktach przekroju z
rys. 2.10 korzystając ze wzoru (2.16):
( )
0
1
=
ω
S
(2.42)
( )
( )
(
) (
)
[
]
y
y
b
a
b
h
a
S
S
α
−
⋅
+
α
+
⋅
δ
⋅
+
=
ω
ω
2
1
1
2
(2.43)
( )
( )
(
)
2
4
2
3
y
b
h
S
S
α
+
⋅
δ
⋅
+
=
ω
ω
(2.44)
( )
( )
δ
α
ω
ω
⋅
⋅
−
=
4
3
4
2
h
S
S
y
(2.45)
16
( )
( )
δ
⋅
⋅
α
+
=
ω
ω
8
4
5
2
h
S
S
y
(2.46)
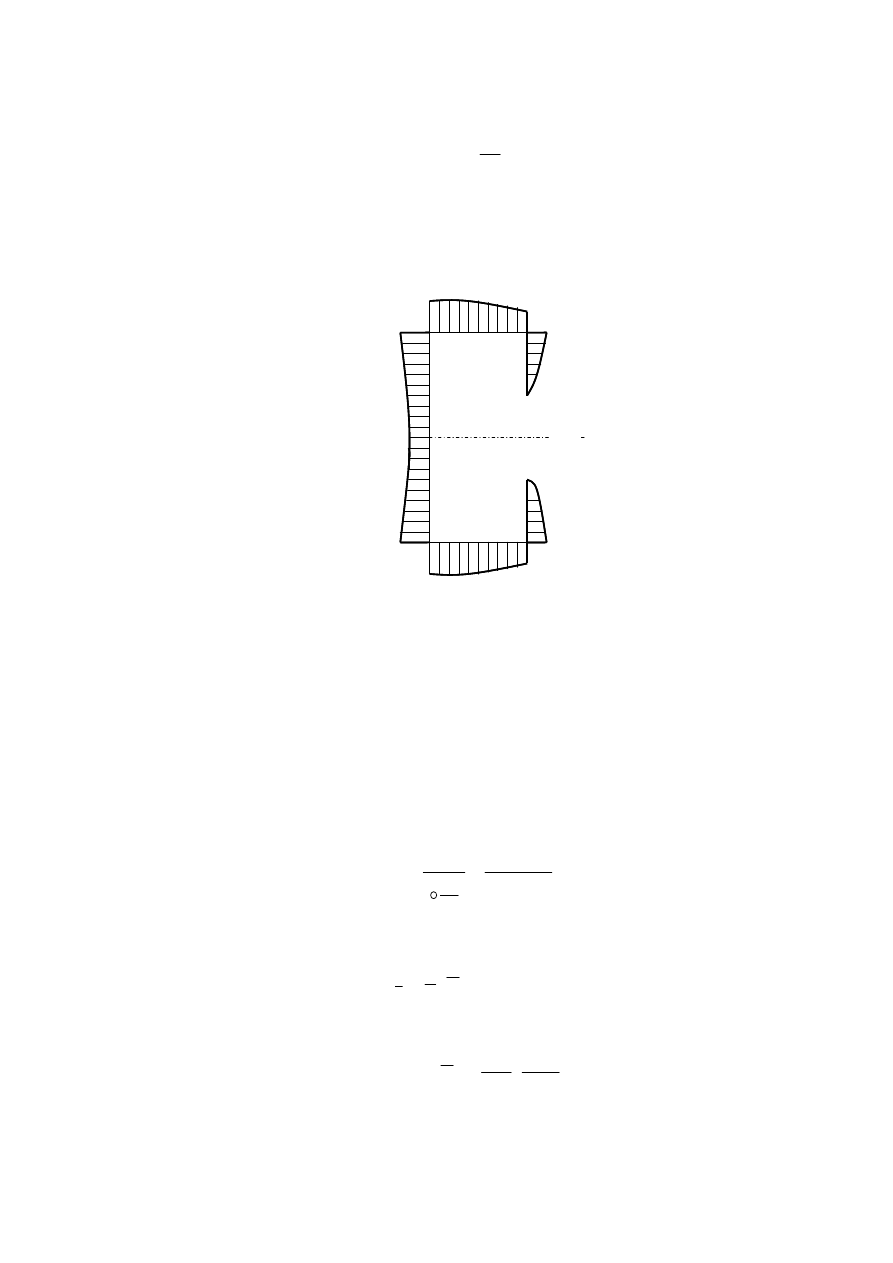
Na tej podstawie można sporządzić rozkład wycinkowego momentu statycznego
S
ω
dla
przekroju badanej belki, pamiętając o symetrycznym rozkładzie
S
ω
względem osi
y.
Przedstawiono go poniżej, na rys. 2.11.
5
1
2
3
4
5
1
2
3
4
Rys. 2.11 Rozkład wycinkowego momentu statycznego
S
ω
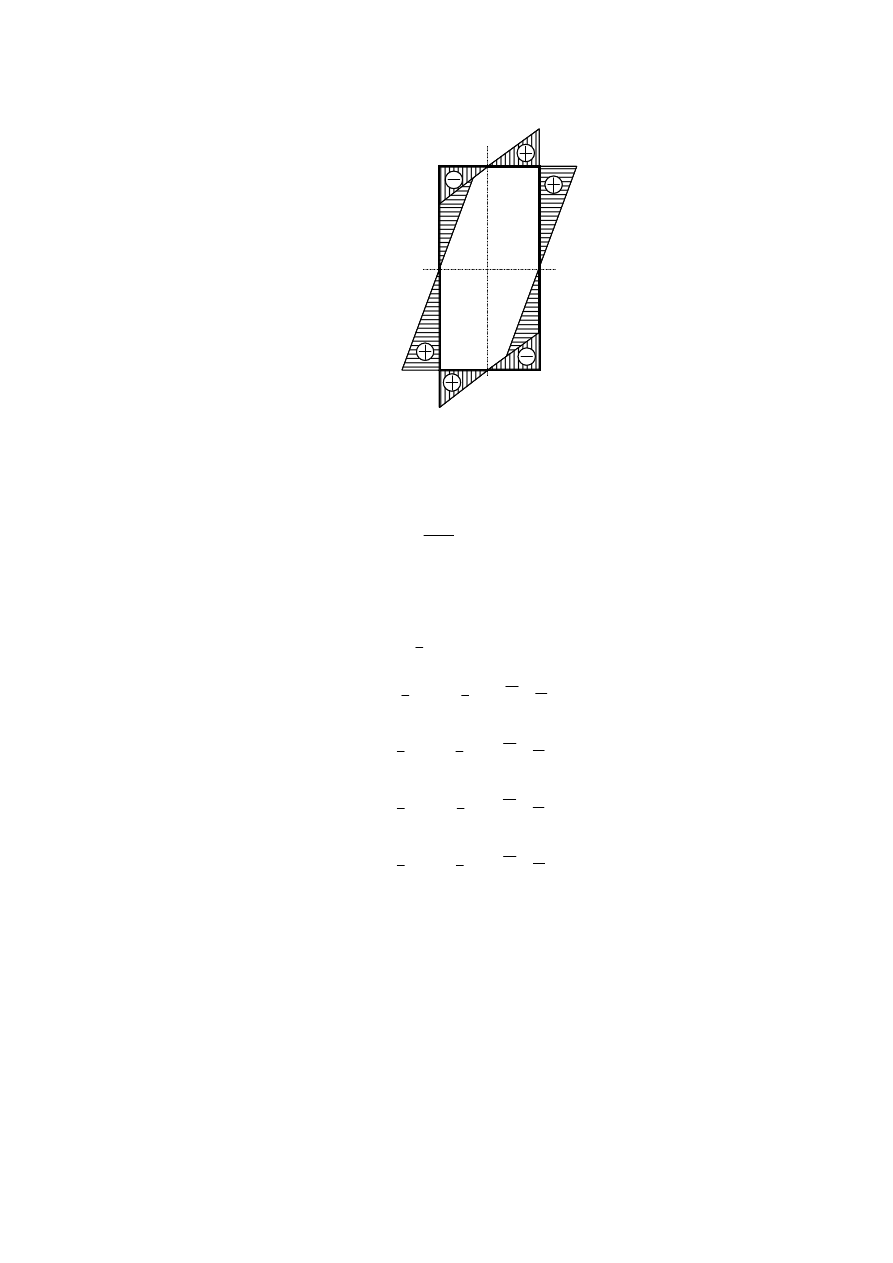
Wykres uogólnionej powierzchni wycinkowej dla przekroju zamkniętego jest
przedstawiony na rys. 2.12. Na jego podstawie wyznaczono następujące charakterystyki
przekroju:
• Powierzchnia ograniczona średnim konturem przekroju:
h
b
A
O
⋅
=
(2.47)
• Biegunowy moment bezwładności obliczany ze wzoru (2.5):
( )
(
)
h
b
h
b
ds
A
I
o
S
+
δ
⋅
=
δ
⋅
=
∫
2
2
2
4
(2.48)
• Główny wycinkowy moment bezwładności przekroju:
(
)
b
h
I
O
+
⋅
δ
⋅
ω
⋅
=
ω
2
3
2
(2.49)
gdzie:
b
h
b
h
h
b
O
+
−
⋅
⋅
=
4
ω
(2.50)
17
ϖ
0
1
2
3
4
5
6
7
8
ϖ
0
ϖ
0
1
2
3
4
5
6
7
8
ϖ
0
Rys. 2.12 Uogólniona powierzchnia wycinkowa
ω
ˆ dla przekroju zamkniętego.
• Kierunkowy moment bezwładności przekroju:
(
)
b
h
b
h
I
p
+
⋅
δ
⋅
⋅
=
2
(2.51)
• Wycinkowy moment statyczny dla przekroju zamkniętego badanego w ćwiczeniu wynosi
w wybranych punktach odpowiednio:
( )
0
1
=
ω
S
,
(2.52)
( )
( )
δ
ω
ω
ω
⋅
⋅
+
=
4
1
2
h
S
S
O
(2.53)
( )
( )
δ
ω
ω
ω
⋅
⋅
+
=
4
2
3
b
S
S
O
(2.54)
( )
( )
δ
ω
ω
ω
⋅
⋅
−
=
4
3
4
b
S
S
O
(2.55)
( )
( )
δ
ω
ω
ω
⋅
⋅
−
=
4
4
5
h
S
S
O
(2.56)
Rozkład wycinkowego momentu statycznego przedstawia rys. 2.13. Warto podkreślić, że
rozkłady powierzchni wycinkowej, przedstawione na rys. 2.10 i 2.12, odzwierciedlają
rozkłady naprężeń normalnych w przekrojach badanych prętów (patrz wzory 2.27 i 2.29).
Podobnie, wykresy wycinkowego momentu statycznego, przedstawione na rys. 2.11
i 2.13 odzwierciedlają rozkłady wartości naprężeń stycznych skręcania giętno-skrętnego
(patrz wzory 2.28 i 2.30).
18
1
2
3
4
5
6
7
8
1
2
3
4
5
6
7
8
Rys. 2.13 Rozkład wycinkowego momentu statycznego
2.4 WYKONANIE ĆWICZENIA
W celu wykonania ćwiczenia należy:
1. Dokonać pomiarów wielkości geometrycznych przekrojów badanych prętów.
2. Wyznaczyć charakterystyki przekroju, niezbędne do obliczenia kąta skręcenia pręta.
3. Wyznaczyć graficzną zależność teoretycznego kąta skręcenia od wartości momentu
skręcającego.
4. Dokonać pomiarów kąta skręcenia dla kilku wartości momentu skręcającego (zmiana
obciążenia i ramienia siły) i otrzymane wyniki nanieść na wykres teoretyczny.
5. Dokonać pomiaru naprężeń za pomocą tensometrów naklejonych w wybranych
przekrojach badanego pręta i ocenić wartość naprężeń normalnych.
6. Dokonać obliczeń sił wewnętrznych w przekrojach oraz naprężeń w punktach
pomiarowych przy założeniu skręcania swobodnego i nieswobodnego.
7. Dokonać porównania wartości otrzymanych teoretycznie i doświadczalnie oraz wyciągnąć
wnioski.
2.5 LITERATURA
1. S. Oziemski, W. Sobczykiewicz:
Konstrukcje nośne maszyn roboczych ciężkich, WPW
Warszawa 1990
2. Z. Dyląg, A. Jakubowicz, Z. Orłoś:
Wytrzymałość materiałów, WNT Warszawa 1996
3. J. Rutecki:
Cienkościenne konstrukcje nośne, WNT Warszawa 1966
Wyszukiwarka
Podobne podstrony:
Lab KN cw 5 id 258468 Nieznany
Lab KN cw 3
Lab KN cw 4 id 258467 Nieznany
Lab KN cw 1
Lab KN cw 6
Lab KN cw 5 id 258468 Nieznany
Lab KN cw 5
Lab KN cw 6
Lab KN cw 4
Lab KN cw 3
Lab KN cw 2
Lab technologii ćw 2 ogarnijtemat com
Lab TP Ćw 7
Instr lab elektronika Cw 2
ćw 1 SRT4, SiMR, Pojazdy, Lab. Pojazdów, Ćw 1
teoria przezwojowana, Semestr 3 moje, FIZYKA LAB, fizyka cw 1
Lab technologii cw 4 id 258645 Nieznany
Lab technologii cw 6 id 258649 Nieznany
więcej podobnych podstron