AiR II rok czwartek nieparzysty
Podstawy automatyki - ćwiczenia
Lista nr 2
1)
Wyznaczyć opis w przestrzeni stanu dla równań
a)
u
y
dt
dy
dt
y
d
3
2
2
2
b)
u
dt
du
dt
u
d
dt
u
d
y
dt
dy
dt
y
d
dt
y
d
3
3
5
4
2
3
2
2
3
3
2
2
3
3
2)
Dla przykładu z zadania 1a wyznaczyć macierz tranzycyjną:
a) metodą odwrotnego przekształcenia Laplace’a
b) metodą diagonalizacji macierzy
3)
Rozwiązać równania stanu z zadania 1a przy następujących założeniach:
a) u(t)=0, y’(0)=0, y(0)=1
b) u(t)=2*1(t), y’(0)=y(0)=0
4)
Wyznaczyć transmitancję operatorową dla równań stanu wyznaczonych w
zadaniu 1
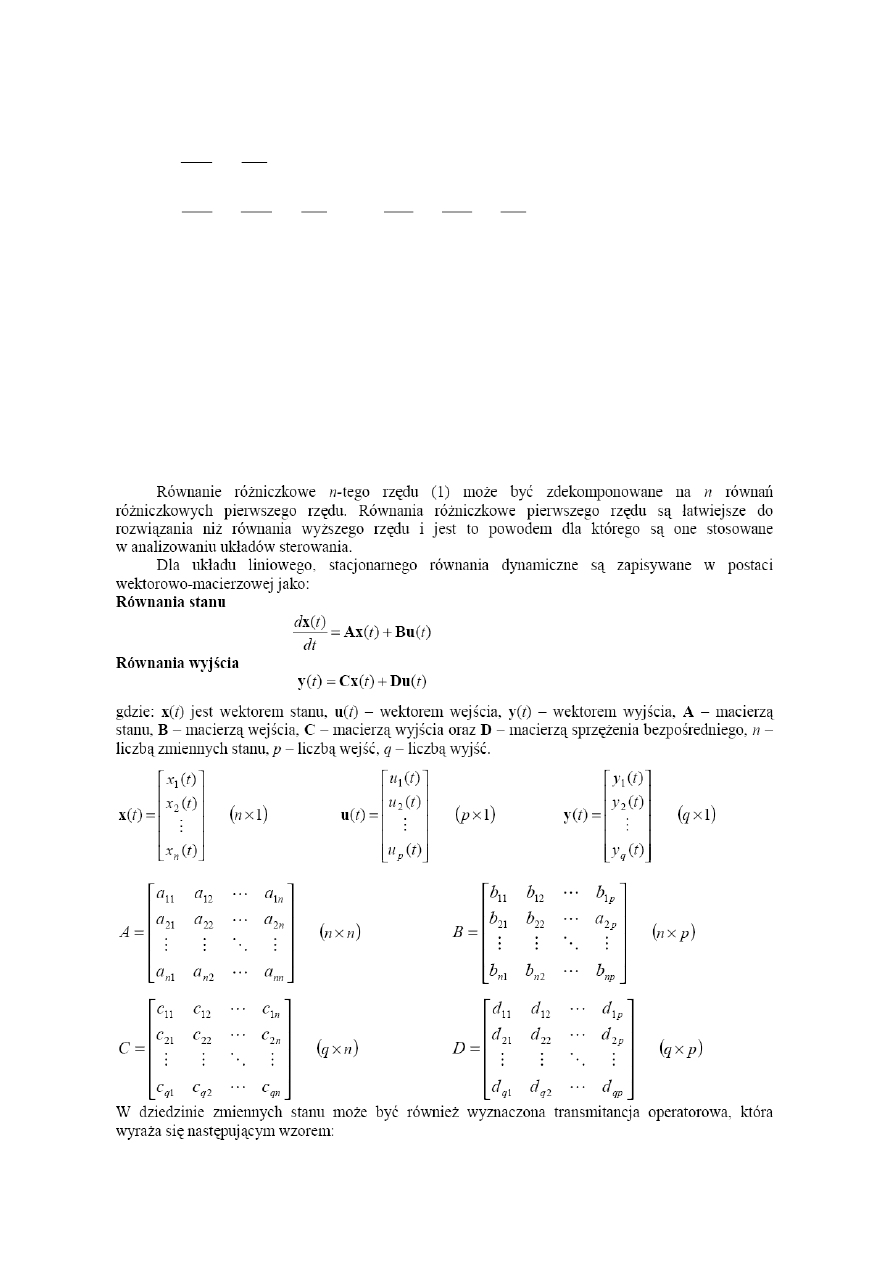
OPIS UKŁADÓW DYNAMICZNYCH W PRZESTRZENI STANÓW
D
B
A
sI
C
s
G
1
]
[
)
(

Wyznaczanie równań stanu na podstawie równania różniczkowego
Metoda ogólna
W przypadku równania różniczkowego rzędu n-tego
d
n
y
dt
n
+ a
n-1
d
n-1
y
dt
n-1
+...+ a
1
dy
dt
+a
0
y= b
0
u
z prostym skladnikiem wymuszającym, jako zmienne stanu przyjmuje się
)
1
(
2
1
,
,
,
n
n
y
x
y
x
y
x
Wówczas otrzymujemy równania stanu
1
0
0
1
1
3
2
2
1
n
i
i
i
n
n
n
u
b
x
a
x
x
x
x
x
x
x
i równanie wyjścia
1
x
y
W przypadku równania różniczkowego rzędu n-tego z wymuszeniem zawierającym
pochodne
d
n
y
dt
n
+ a
n-1
d
n-1
y
dt
n-1
+...+ a
1
dy
dt
+a
0
y= b
m
d
m
u
dt
m
+ b
m-1
d
m-1
u
dt
m-1
+...+ b
1
du
dt
+b
0
u
wyznacza się opis metodą ogólną w postaci
u
c
c
c
x
x
x
x
a
a
a
a
x
x
x
x
n
n
n
n
n
n
2
1
1
2
1
1
2
1
0
1
2
1
1
0
0
0
0
1
0
0
0
0
1
0
u
c
x
x
x
y
n
0
2
1
0
0
1
Następnie stosujemy podstawienie :
u
c
x
y
o
1
,
u
c
u
c
x
u
c
x
y
o
o
1
2
1
'
'
'
, .........
Powyższe wyrażenia należy podstawić do równania różniczkowego, porównać stronami i
wyliczyć współczynniki
,....
,
,
2
1
c
c
c
o
Rozwiązywanie równań stanu
Rozwiązanie równania
Bu
Ax
x
spełniające warunek początkowy
0
0
)
(
x
t
x
ma postać:
t
t
t
A
t
t
A
d
Bu
e
x
e
t
x
0
0
)
(
)
(
)
(
0
)
(
At
e
t
)
(
- macierz tranzycyjna
W przypadku gdy
0
)
(
t
u
rozwiązanie ma postać:
0
0
)
(
)
(
x
t
x
e
t
x
At
Wyznaczanie macierzy tranzycyjnej -metoda odwrotnego przekształcenia Laplaca
e
At
=L
-1
[(sI-A)
-1
]
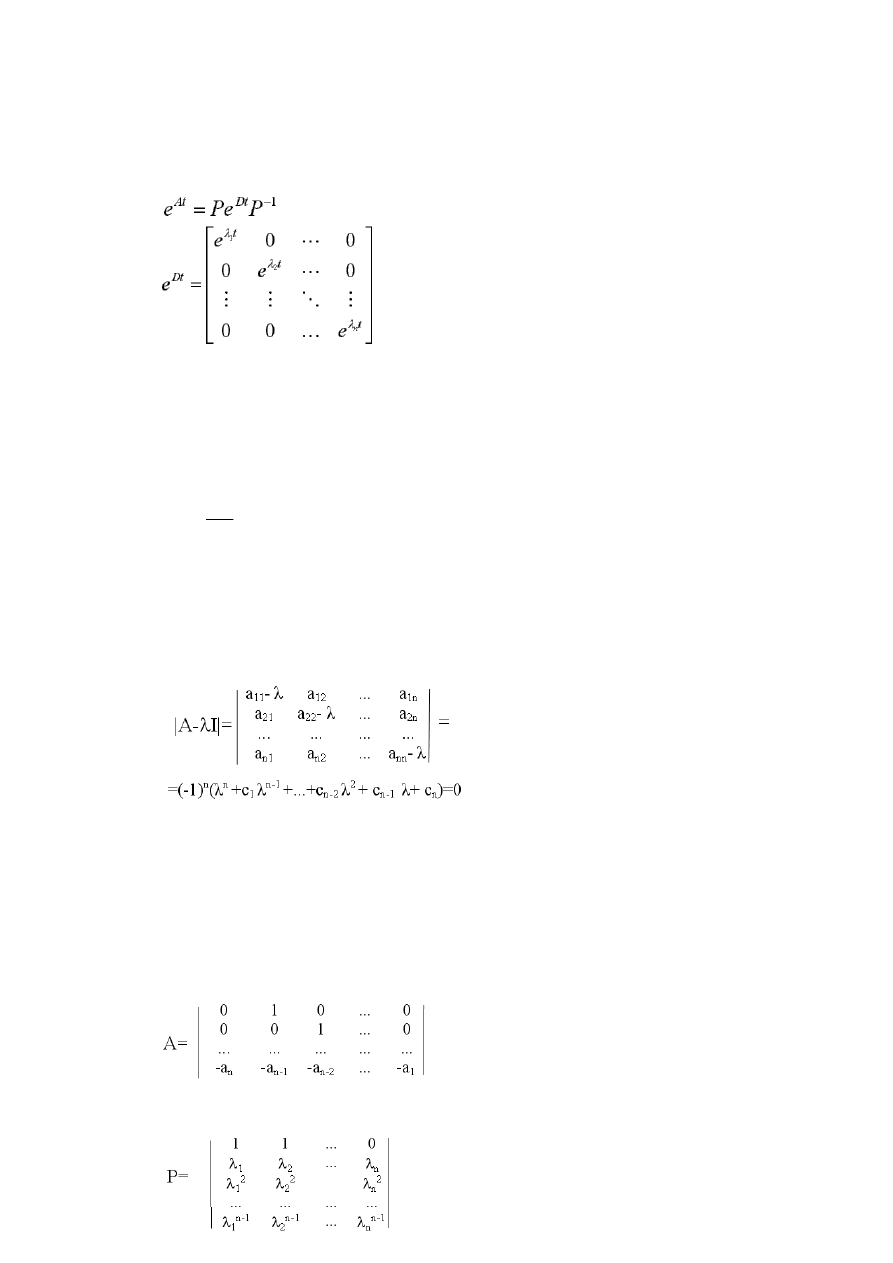
Wyznaczanie macierzy tranzycyjnej -metoda diagonalizacji macierzy
Metoda ta oparta jest na następującej zależności
Minorem M
ij
nazywamy wyznacznik (n-1) - szego stopnia otrzymanego przez opuszczenie i-
tego wiersza i j-tej kolumny z wyznacznika n-tego stopnia
Dopełnienie algebraiczne D
ij
określa się z zależności D
ij
=(-1)
i+ j
M
ij
Macierz dołączoną macierzy kwadratowej A
d
otrzymuje się przez transpozycję macierzy,
w której każdy element A zastąpiono przez jego dopełnienie algebraiczne
A A
d
=A
d
A=|A| I
Macierz odwrotna A
-1
jest macierzą dołączoną podzieloną przez wyznacznik macierzy
|
A
|
A
A
d
1
A
-1
A=A A
-1
=I
Jeśli A jest macierzą o wymiarach n x n, to wyznacznik |A-
I| nazywa się wielomianem
charakterystycznym macierzy A
I - macierz jednostkowa, w której wszystkie elementy na przekątnej są równe 1
Równanie |A-
I|=0 nazywa się równaniem charakterystycznym
Pierwiastki równania charakterystycznego
1,
2,...,
n
stanowią wartości własne macierzy A
Wektor niezerowy V
i
który spełnia równanie AV
i
=
i
V
i
nazywa się wektorem własnym
macierzy A związanym z wartością własną
i
Wektory własne wyznacza się z następującego równania [A-
i
I ] V
i
=0
Jeśli
1,
2,...,
n
są pojedynczymi wartościami własnymi macierzy A, a wektory V
1
, V
2
,..., V
n
są wektorami własnymi macierzy A, to kolumny macierzy przekształcenia
diagonalizującego P stanowią wektory własne macierzy A
P=[V
1
, V
2
,..., V
n
]
Jeśli macierz A ma postac
i wartości własne macierzy A są pojedyncze
1,
2,...,
n,
to macierz diagonalizująca P ma
postac
Wyszukiwarka
Podobne podstrony:
podstawy automatyki ćwiczenia lista nr 4b
podstawy automatyki ćwiczenia lista nr 4c
podstawy automatyki ćwiczenia lista nr 5b
podstawy automatyki ćwiczenia lista nr 3c
podstawy automatyki ćwiczenia lista nr 4d
podstawy automatyki ćwiczenia lista nr 4d
podstawy automatyki ćwiczenia lista nr 5a
podstawy automatyki ćwiczenia lista nr 1b
podstawy automatyki ćwiczenia lista nr 5a
podstawy automatyki ćwiczenia lista nr 4c
podstawy automatyki ćwiczenia lista nr 5b
podstawy automatyki ćwiczenia lista nr 2a
podstawy automatyki ćwiczenia lista nr 5a
podstawy automatyki ćwiczenia lista nr 4a
podstawy automatyki ćwiczenia lista nr 5b
podstawy automatyki ćwiczenia lista nr 1c
podstawy automatyki ćwiczenia lista nr 2b
podstawy automatyki ćwiczenia lista nr 1a
podstawy automatyki ćwiczenia lista nr 3a
więcej podobnych podstron