
PODSTAWY
KINEMATYKI
Wykład 2

PODSTAWY
KINEMATYKI
Kinematyka – klasyfikacja i
porównywanie różnych ruchów
(jak zmiany ruchu zależą od czasu?)
Wykład – 2 -

Ruch mechaniczny – zmiana położenia ciała
konieczne wskazanie innych ciał względem, których
ruch się odbywa (względne przemieszczanie się ciał)
Ruch – zmiana w przestrzeni i w czasie
Układ odniesienia – zbiór nieruchomych względem
siebie ciał służący do rozpatrywania ruchu innych ciał i
zegar odmierzający czas
Ruch tego samego ciała względem różnych układów
odniesienia różny charakter (pasażer w pociągu)
opis ruchu – podanie położenia dla każdej chwili czasu
Punkt materialny – ciało o znikomo małych rozmiarach
w warunkach danego zagadnienia, o danej masie i
położeniu, które można określić jak położenie punktu
geometrycznego
Ruch mechaniczny
3
Wektory
i skalary
• dla ruchu jednowymiarowego kierunek wyróżniamy
znakiem
• do opisu ruchu w przestrzeni trójwymiarowej stosujemy
pojęcie wektora
• wektor posiada wartość i kierunek
• działania na wektorach podlegają prawom rachunku
wektorowego
• wielkości wektorowe: przemieszczenie, prędkość,
przyspieszenie, siła
• wielkości skalarne: temperatura, ciśnienie, energia, masa,
czas – nie wykazują żadnego kierunku w przestrzeni
A
B
a
a
a ,
początek
koniec
moduł
zwrot
kierunek
Ruch w trzech wymiarach
•
układ odniesienia
układ odniesienia - kartezjański
układ współrzędnych prostokątnych
•
położenie cząstki
położenie cząstki – podanie
współrzędnych cząstki (wektor
położenia)
•
ruch
ruch – zmiana położenia względem
układu odniesienia
•
tor (trajektoria) cząstki
tor (trajektoria) cząstki – linia którą
zakreśla poruszająca się cząstka
•
przemieszczenie
przemieszczenie
k
z
j
y
i
x
z
y
x
r
)
,
,
(
X
Y
Z
A
r
z
A
y
A
x
A
k
j
i
A
B
r
r
r
B
)
,
,
(
)
.
,
,
(
2
4
1
5
2
3
2
B
A
r
r
)
.
,
,
.
,
,
5
0
1
1
5
2
2
3
4
2
1
A
B
r
r
r
0
0
1 ,
,
i
0
1
0 ,
,
j
1
0
0 ,
,
k
wektory jednostkowe
r
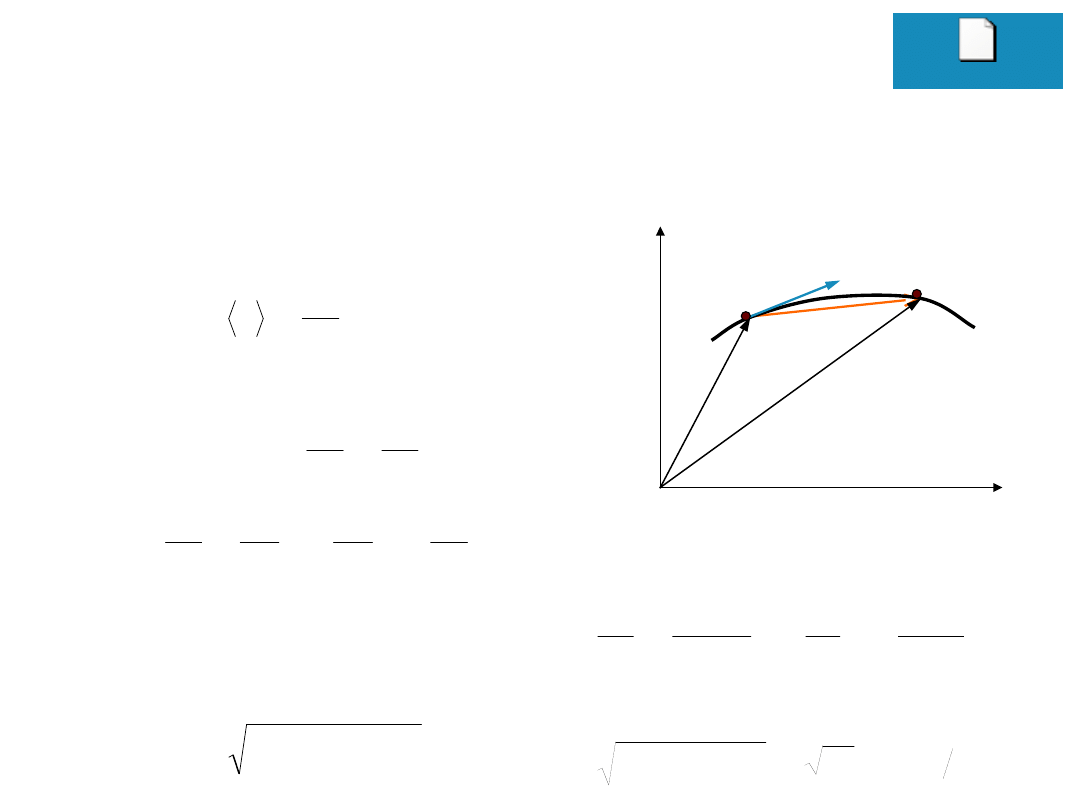
Prędkość
cząstka porusza się po krzywoliniowym torze z
punktu A do B w czasie t przebywając drogę s
• prędkość średnia
• prędkość chwilowa
t
r
v
dt
r
d
t
r
v
t
lim
0
k
dt
dz
j
dt
dy
i
dt
dx
dt
r
d
v
k
v
j
v
i
v
v
z
y
x
2
2
2
z
y
x
v
v
v
v
y
x
A
B
t
r
r
r
t
t
r
r
s
v
tor
ProjKinematics.swf
RacingBalls .swf
z
y
x
v
v
v
v
,
,
m
t
t
r
3
3
2
2
,
,
k
dt
t
d
j
dt
d
i
dt
t
d
dt
r
d
v
3
3
2
2
Przykład:
3
0
4
,
,
t
v
s
t
Dla
1
3
0
4
1
,
,
s
v
s
m
v
5
25
3
0
4
2
2
2
wartość
prędkości
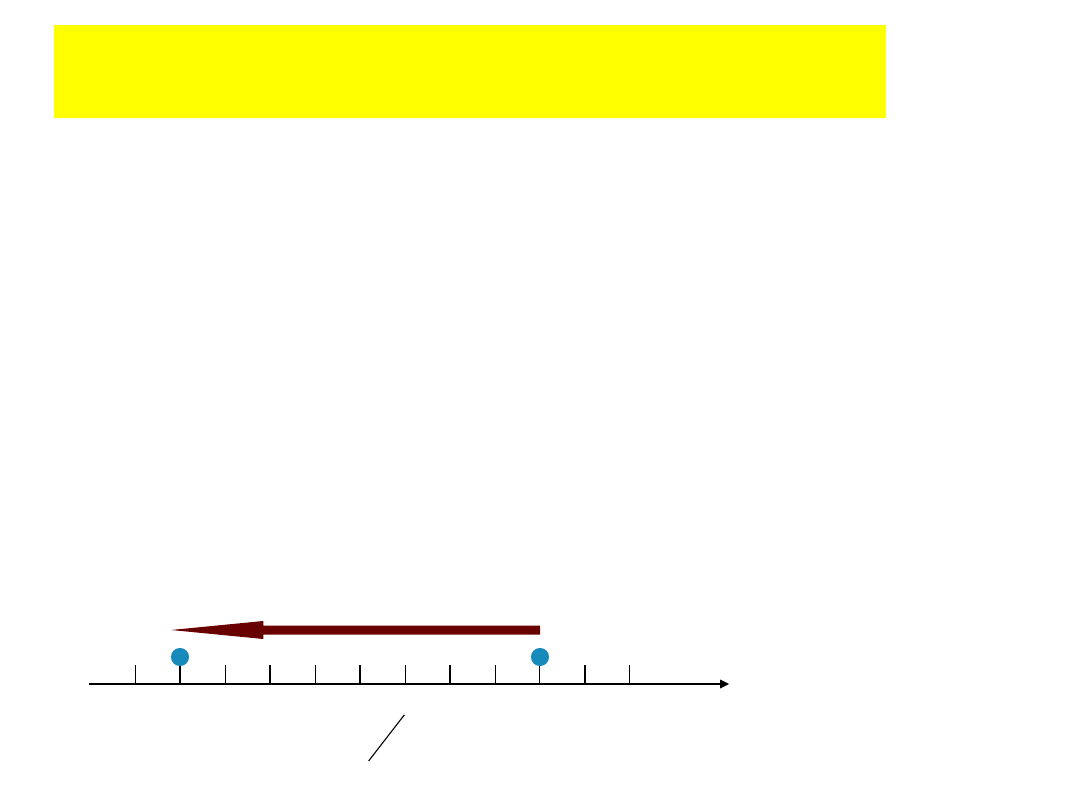
Ruch prostoliniowy
• ruch zachodzący tylko wzdłuż linii prostej
• położenie ciała, czyli współrzędną punktu w jakim
się ono znajduje, wyznaczamy względem punktu
odniesienia (początku osi) podając współrzędną
punktu
• przemieszczenie, zmiana położenia punktu
materialnego
• znak przemieszczenia określa kierunek ruchu
7
1
2
x
x
x
m
x
m
x
5
3
2
1
,
0 1 2 3 4 5
x [m]
-1
-2
-3
-4
-5
-6
początek osi
m
x
8
3
5
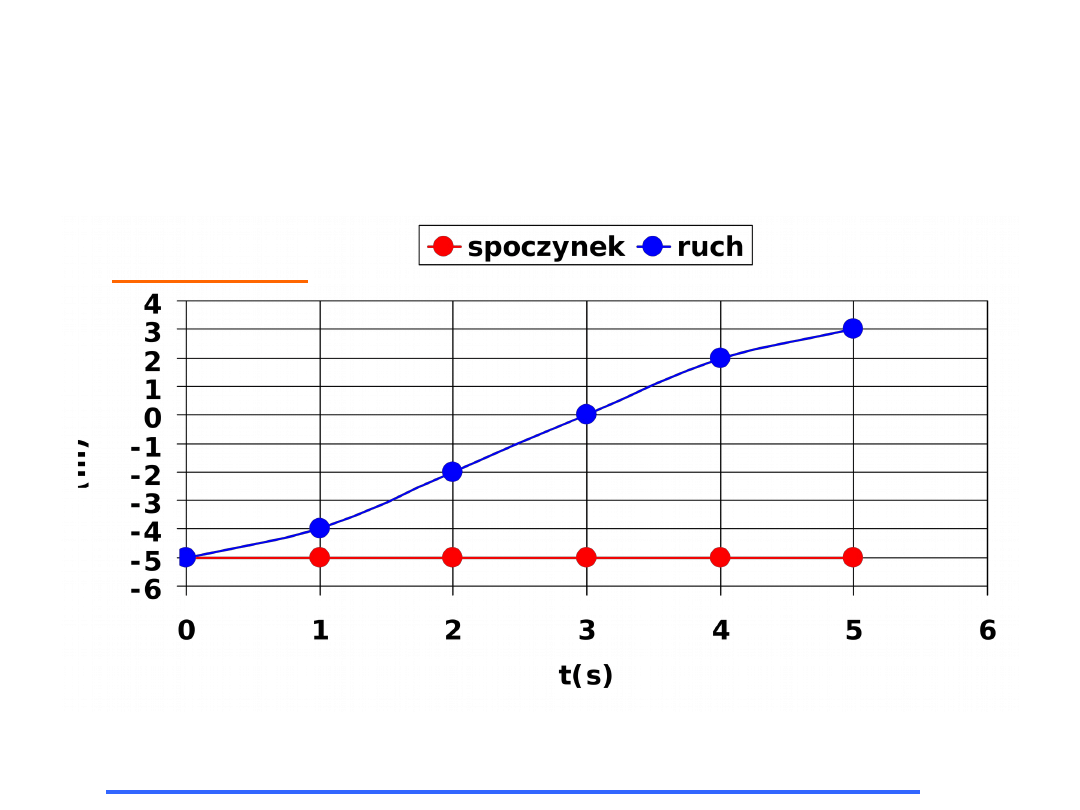
Sposób przedstawiania
ruchu – wykres x(t)
t
f
x
5
x
5
5
0
7
0
1
0
2
3
t
t
t
x
,
,
,
Prędkość średnia
• jak szybko porusza się cząstka?
– prędkość średnia
jednostka (m/s)
– średnia wartość bezwzględnej prędkości
t
zenie
przemieszc
t
t
x
x
t
x
v
v
v
śr
1
2
1
2
t
droga
calkowita
t
s
v
śr
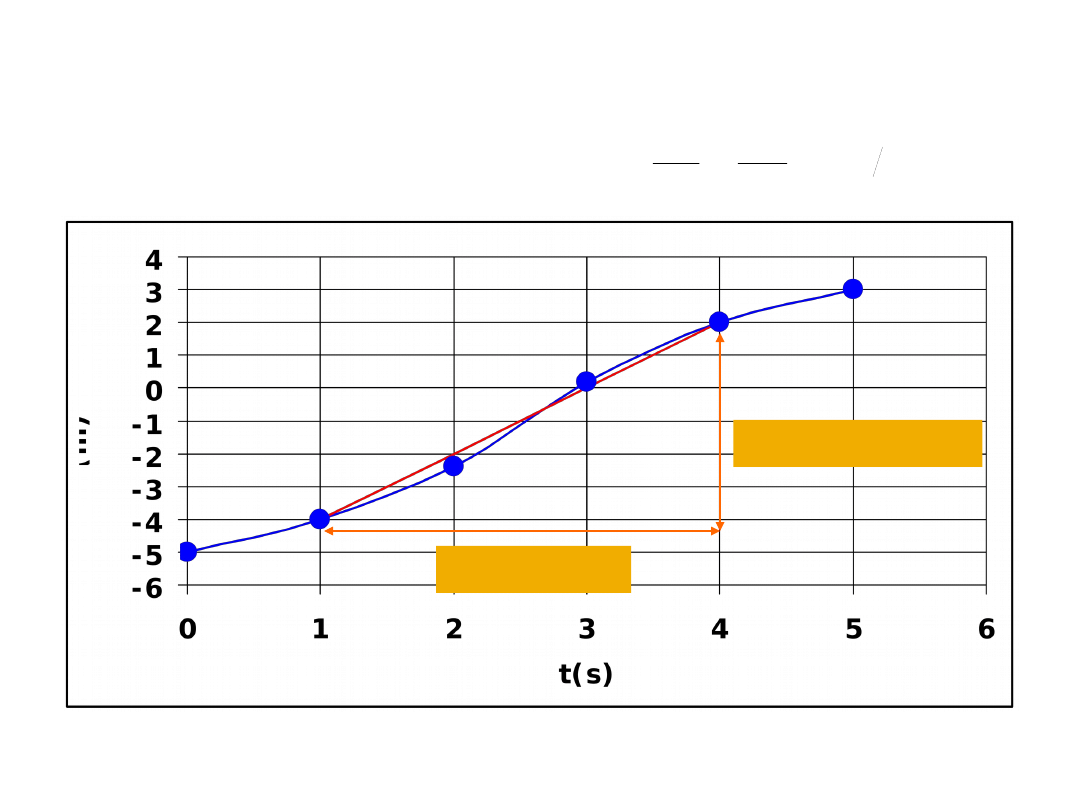
Wyznaczanie prędkości
średniej
x=2-(-4)=6 m
t=4-1=3 s
s
m
s
m
t
x
v
śr
2
3
6
prędkość średnia jako nachylenie prostej (współczynnik kierunkowy)
Prędkość chwilowa
czyli po prostu „prędkość”
• jak szybko porusza się cząstka w danej chwili
• v – jest szybkością zmiany położenia cząstki
przy zmianie czasu w danej chwili (v jest
pochodną x względem t)
• wartość v jest równa nachyleniu prostej
stycznej do wykresu x=f(t)
dt
dx
t
x
v
t
lim
0
Przy zmniejszaniu się t średnia prędkość dąży do granicy,
którą jest prędkość w danej chwili
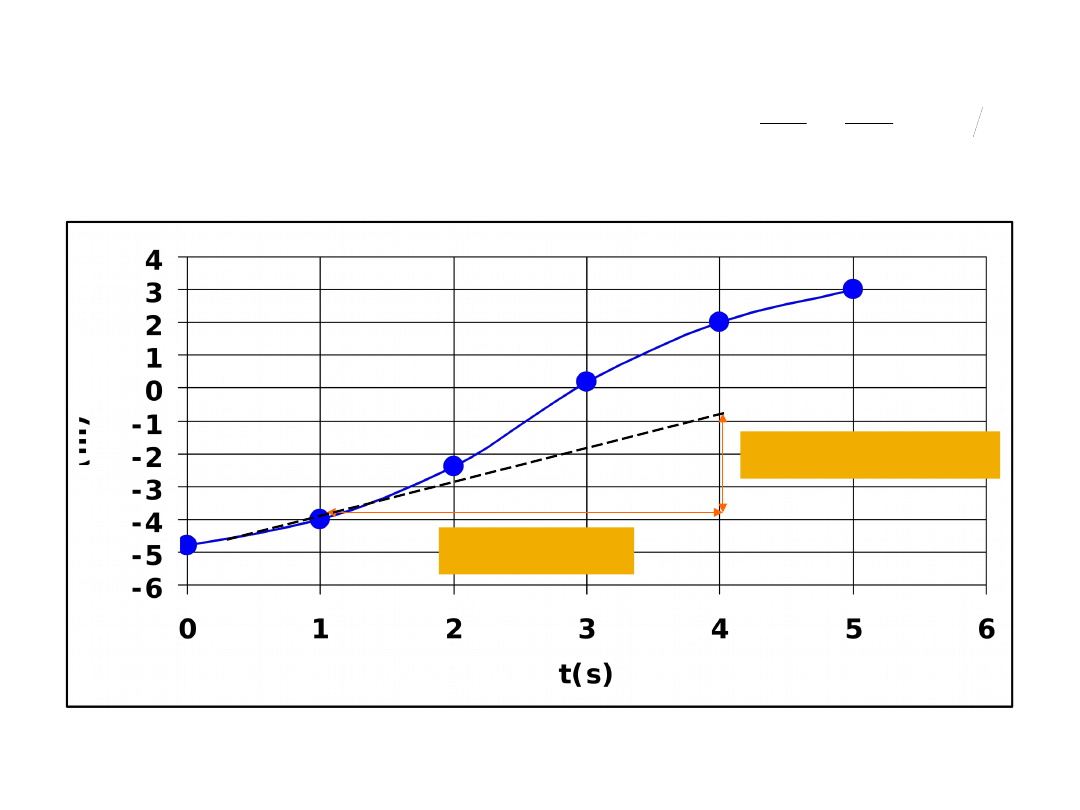
prędkość
chwilowa
s
m
s
m
t
x
s
v
1
3
3
1
prędkość chwilowa jako nachylenie stycznej do wykresu x(t)
x=-1-(-4)=3 m
t=4-1=3 s
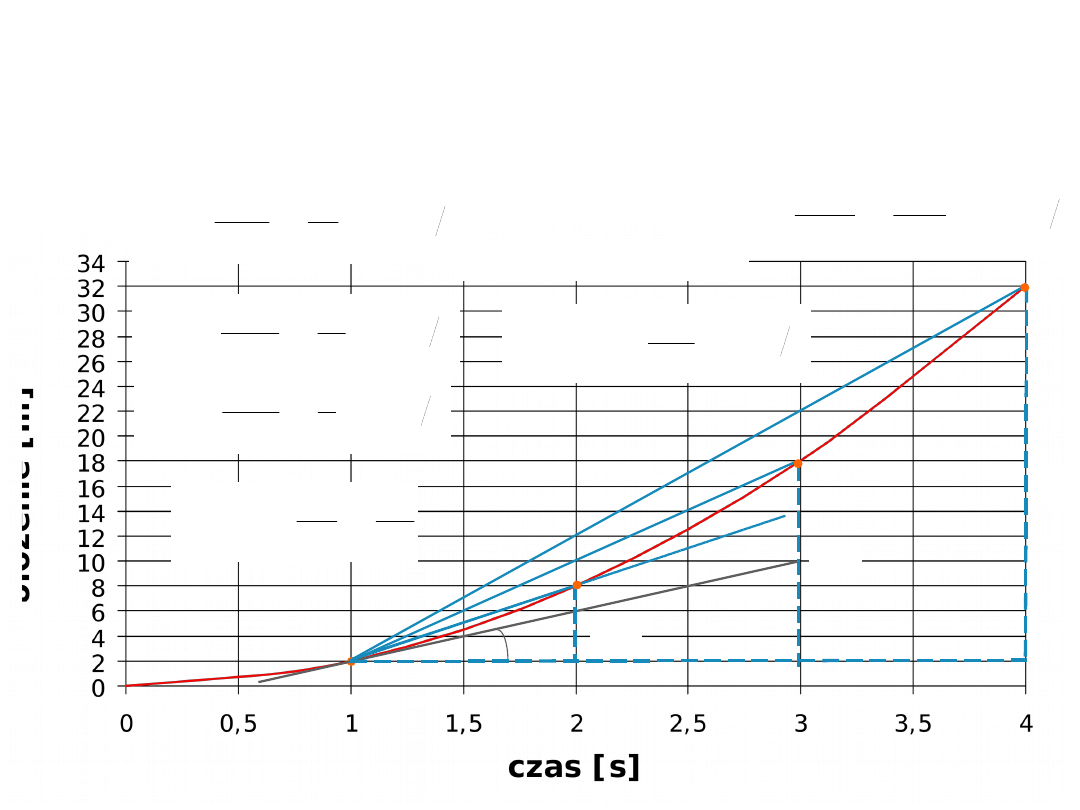
Pochodna - graficznie
funkcja x=2t
2
pochodna x’=4t [v(t=1)=4]
s
m
t
x
tg
v
4
s
m
t
x
v
śr
10
3
30
1
1
1
1
x
s
m
t
x
v
śr
8
2
16
2
2
2
2
x
s
m
t
x
v
śr
6
1
6
3
3
3
3
x
dt
dx
t
x
v
t
lim
0
s
t
1
0,
s
m
t
x
v
n
n
śrn
1
4
1
0
41
0
,
,
,
41
0
2
1
1
2
2
,
,
x
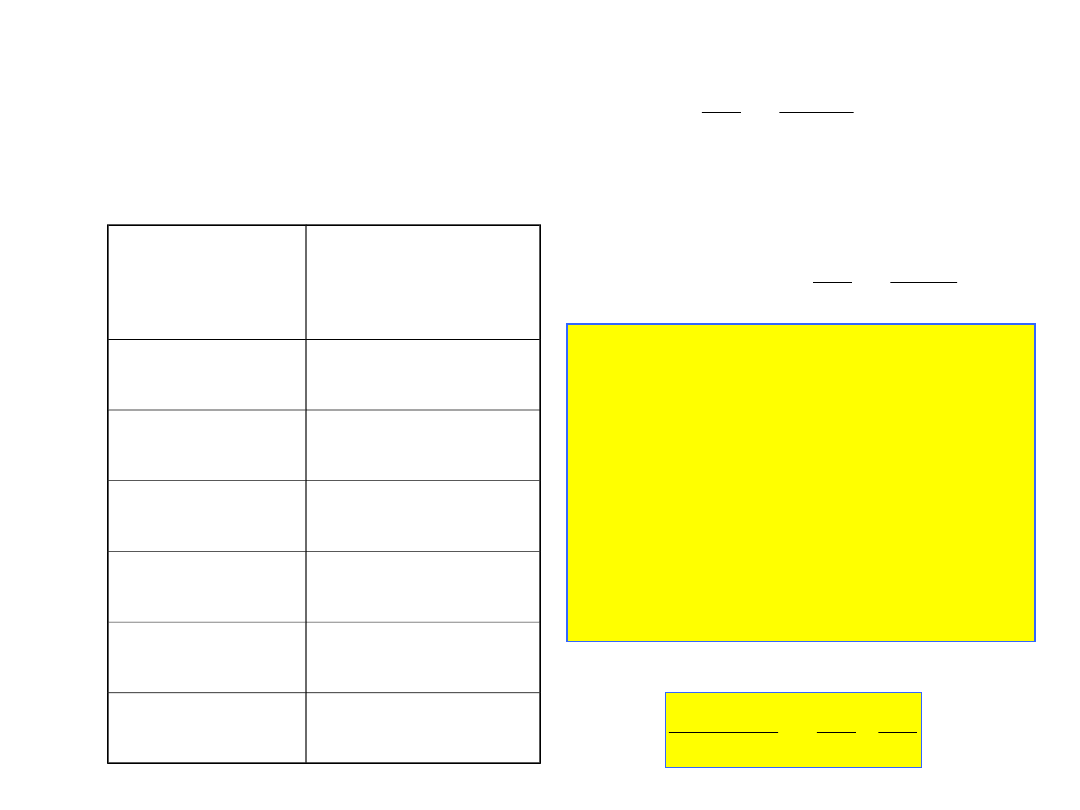
Pochodna
funkcji
Funkcja
f(x)
Pochodna
f’(x)
stała
0
x
n
nx
n-1
sin(x)
cos(x)
cos(x)
- sin(x)
e
ax
ae
ax
ln(x)
1/x
x
dt
t
df
dt
dx
ozn
.
y
dx
x
df
dx
dy
ozn
.
Właściwości pochodnej:
(ax)’=ax’
(x+y)’=x’+y’
(x·y)’=x’·y+x·y’
(x/y)’= (x’·y-x·y’)/y
2
dt
dx
dx
dy
dt
t
x
dy

Przykład
Położenie cząstki, poruszającej się wzdłuż osi x, jest
opisane równaniem (x-w metrach, t- w sekundach):
3
1
2
2
9
8
7
t
t
x
,
,
,
Ile wynosi prędkość cząstki w chwili t = 3,5 s?
Czy ciało porusza się wówczas ze stałą prędkością, czy zmienną?
3
1
2
2
9
8
7
t
t
dt
d
dt
dx
v
,
,
,
2
1
2
3
2
9
0
t
v
,
,
s
m
v
68
5
3
3
6
2
9
5
3
2
,
,
,
,
Cząstka porusza się w ujemnym kierunku osi x z prędkością o
wartości bezwzględnej 68 m/s.
W równaniu v zależy od czasu, a więc prędkość nie jest stała.

Przyspieszenie
• gdy prędkość cząstki się zmienia tzn. że
doznaje ona przyspieszenia
– przyspieszenie średnie
– przyspieszenie chwilowe
16
dt
dv
t
v
a
t
lim
0
2
2
dt
x
d
dt
dx
dt
d
dt
dv
a
t
v
t
t
v
v
a
śr
1
2
1
2
jednostka
2
s
m

Klasyfikacja ruchów
• tor:
• prostoliniowe
• krzywoliniowe (po okręgu, rzut poziomy)
• przestrzenne i płaskie
• wartość prędkości:
• jednostajne
v=const.
a=0
• jednostajnie zmienne v const. a=const.
• niejednostajne
v const. a const.
17
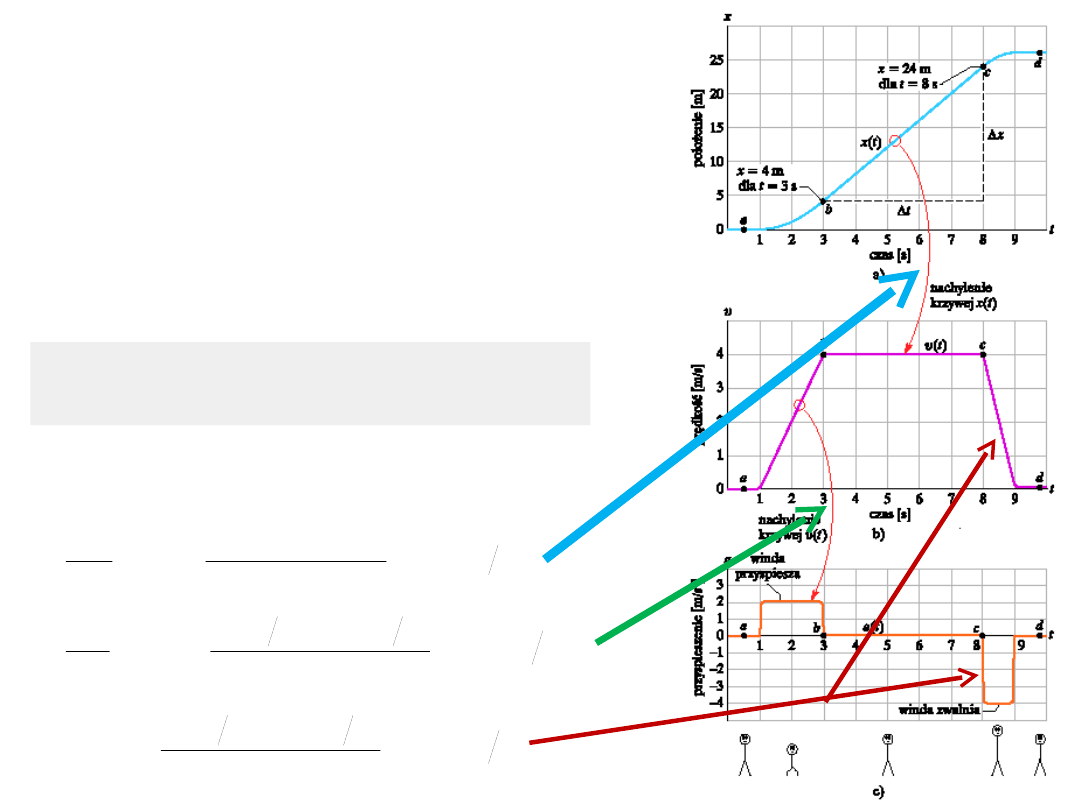
Przykład: winda
18
Na podstawie położenia windy w funkcji
czasu x(t) sporządzić wykres v(t) i a(t).
Winda początkowo nieruchoma jedzie
do góry i następnie zatrzymuje się.
Wybór układu:
dodatni kierunek x – do góry
s
m
s
s
m
m
v
t
x
4
3
8
4
24
2
1
2
1
3
0
4
s
m
s
s
s
m
s
m
a
t
v
2
2
4
8
9
4
0
s
m
s
s
s
m
s
m
a
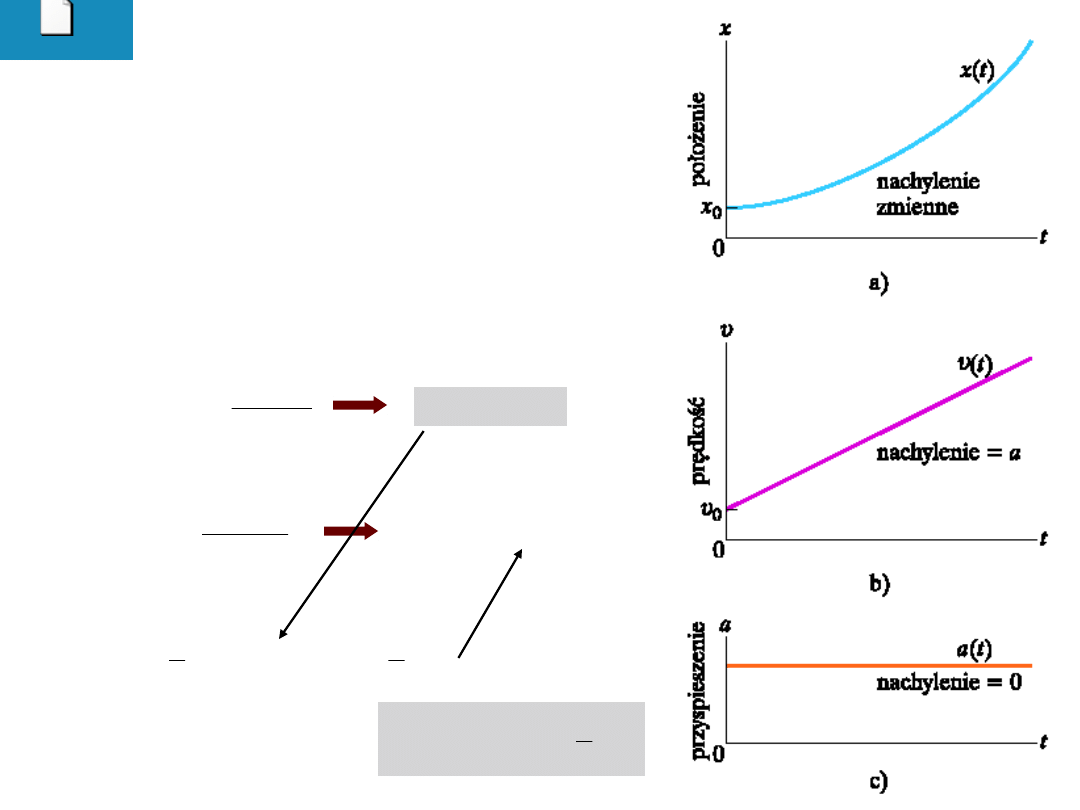
Ruch ze stałym
przyspieszeniem
19
Gdy przyspieszenie jest stałe (a=const.)
to przyspieszenie średnie równe jest
chwilowemu:
0
0
t
v
v
a
a
śr
at
v
v
0
Podobnie:
0
0
t
x
x
v
śr
t
v
x
x
śr
0
Prędkość zmienia się liniowo w czasie, więc:
at
v
v
v
v
śr
2
1
2
1
0
0
2
0
0
2
1
at
t
v
x
x
Podstawowe równania
ruchu ze stałym
przyspieszeniem
ConstantAccel.swf
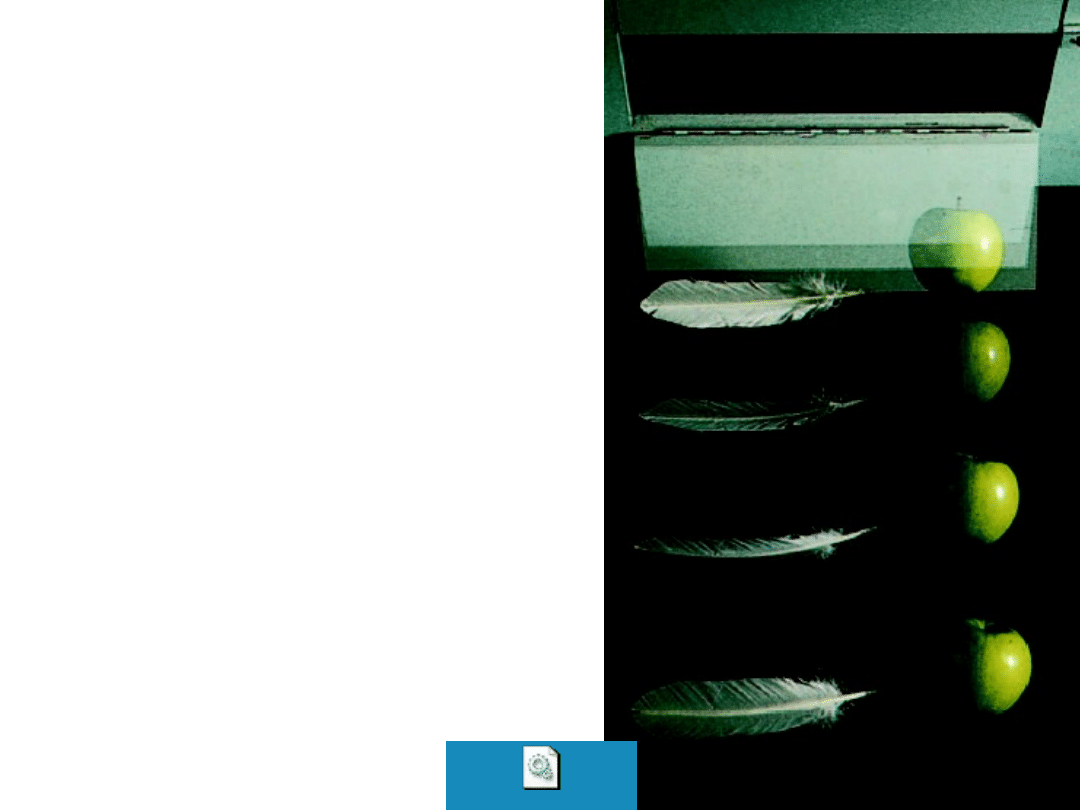
Spadek
swobodny
20
MonkeyHunter.swf
Każde ciało rzucone w górę lub w
dół w pobliżu powierzchni Ziemi
doznaje przyspieszenia o stałej
wartości skierowanego w dół.
Przyspieszenie to nazywamy
przyspieszeniem ziemskim
, a jego
wartość bezwzględna wynosi
g = 9,8 m/s
2
.
Przyspieszenie swobodnego
spadku ciała jest więc równe
a = -g = -9,8 m/s
2
.
Nie zależy ono od właściwości
przedmiotu: masy, kształtu.
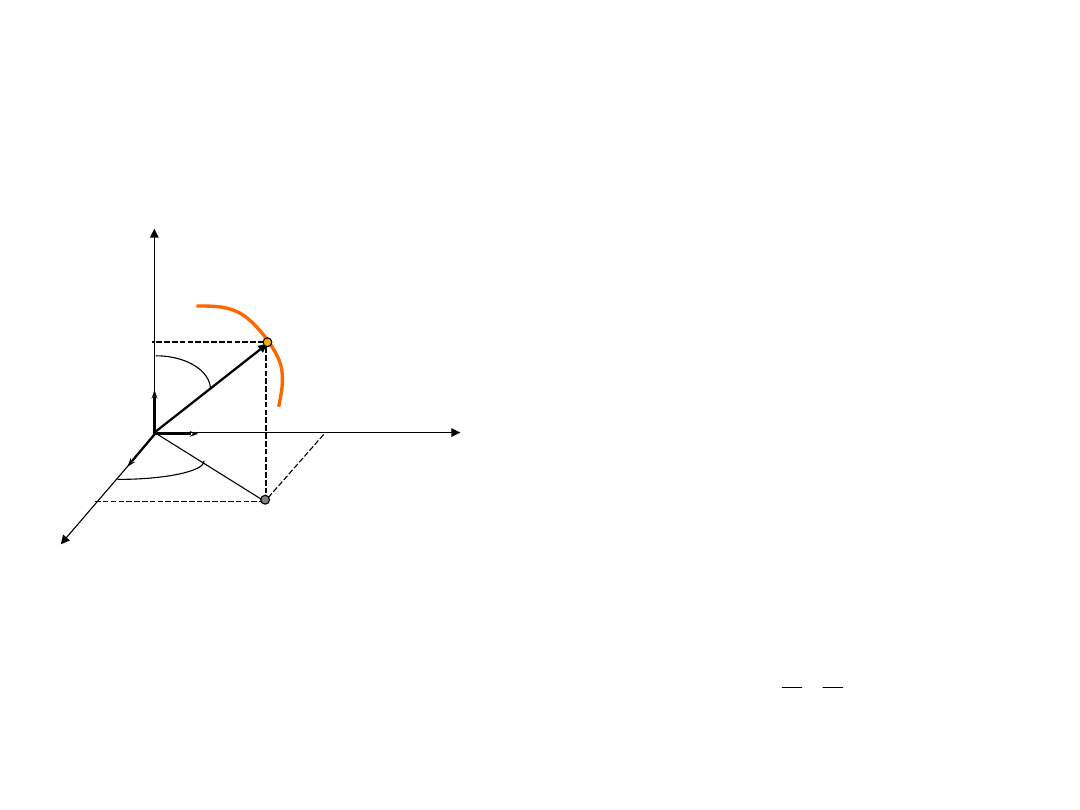
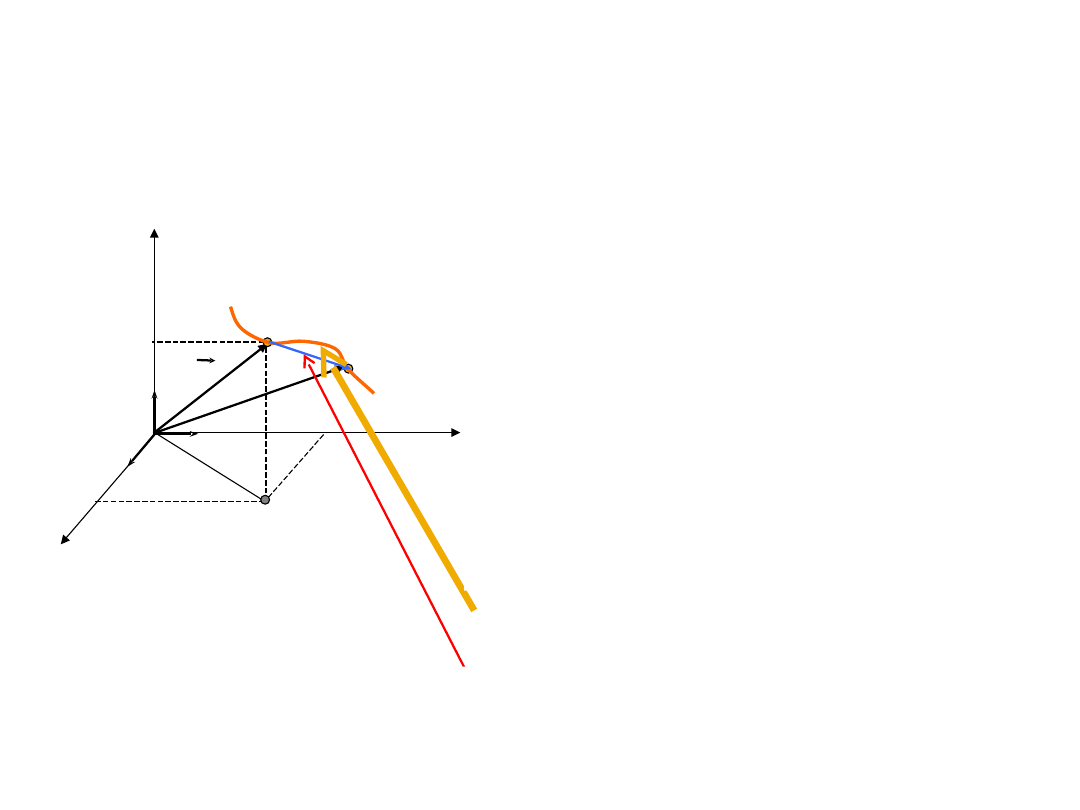
Układ sferyczny
• w układzie sferycznym
położenie cząstki określamy
przez podanie:
– odległości od środka układu r
– kąta azymutalnego w
płaszczyźnie XY
– kąta biegunowego jaki tworzy
wektor r dodatnią półosią OZ
21
)
,
,
(
r
r
X
Y
Z
A
r
z
y
x
k
j
i
cos
sin
r
x
sin
sin
r
y
cos
r
z
związek pomiędzy
współrzędnymi układu
kartezjańskiego i
sferycznego
)
,
,
(
4
4
3
A
r
Układy odniesienia na
płaszczyźnie
• położenie punktu – wektor położenia r (współrzędne
wektora r (x,y) lub r(r, )
• wersory osi układu – wektory o jednostkowej długości,
skierowane zgodnie ze zwrotem osi współrzędnych
22
e
r
0
Y
j
X
i
r
+
r
x
y
e
r
r = i x + j y
r =
r
e
r
kartezjański układ
współrzędnych prostokątnych
układ biegunowy
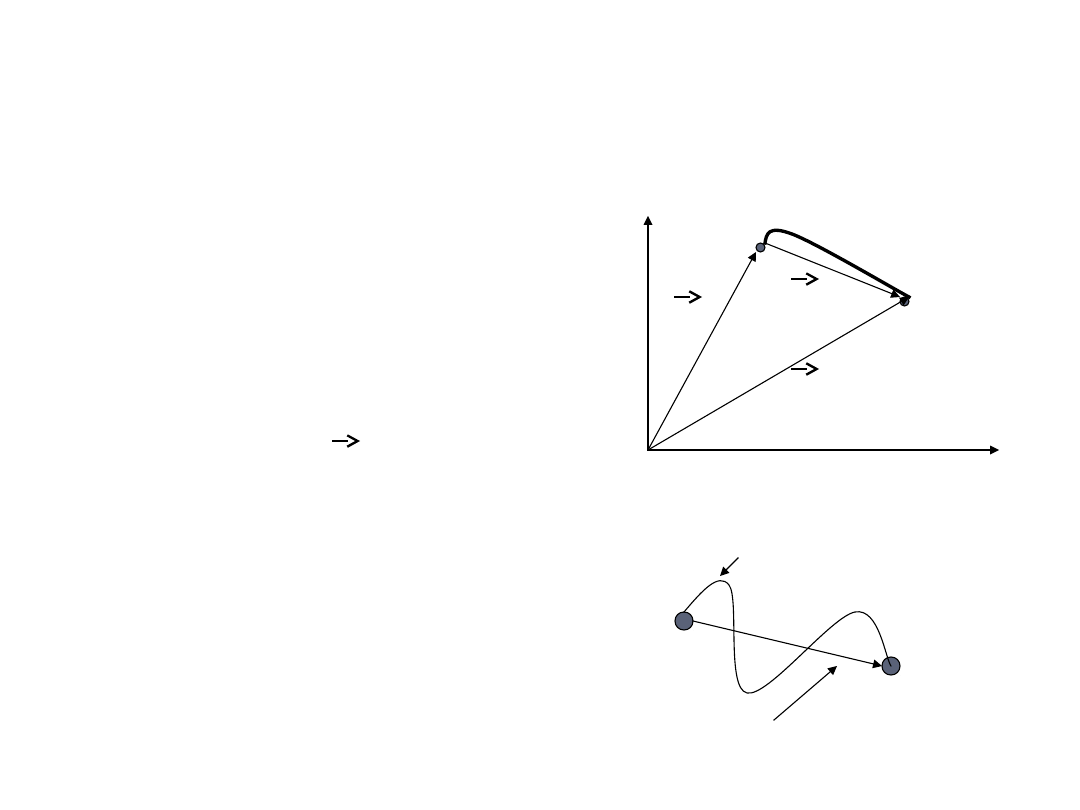
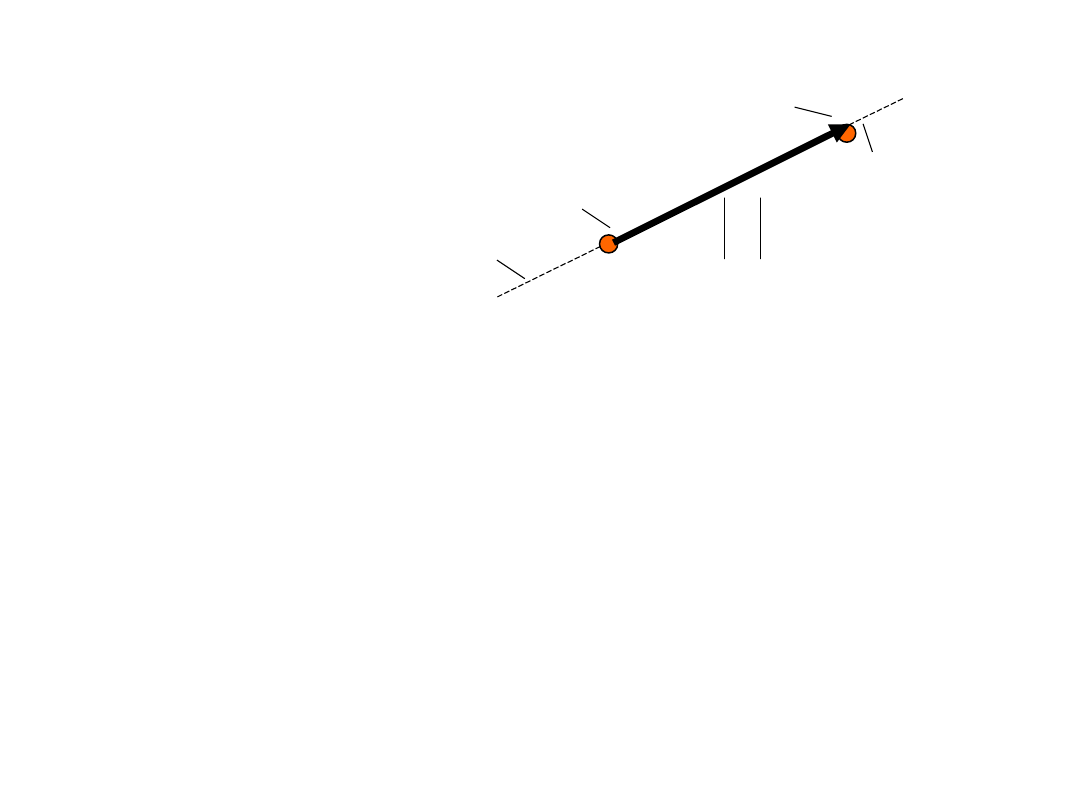
Tor a przemieszczenie
• tor (trajektoria) cząstki – linia
którą zakreśla poruszające się
ciało
• droga s – odległość pomiędzy
położeniem początkowym i
końcowym mierzona wzdłuż toru
• przemieszczenie r – wektor o
początku w punkcie początkowym
(1) i końcowym (2)
23
1
2
tor
przemieszczenie
r
1
r
12
r
2
X
Y
0
j
y
y
i
x
x
r
r
r
)
(
)
(
1
2
1
2
1
2
12
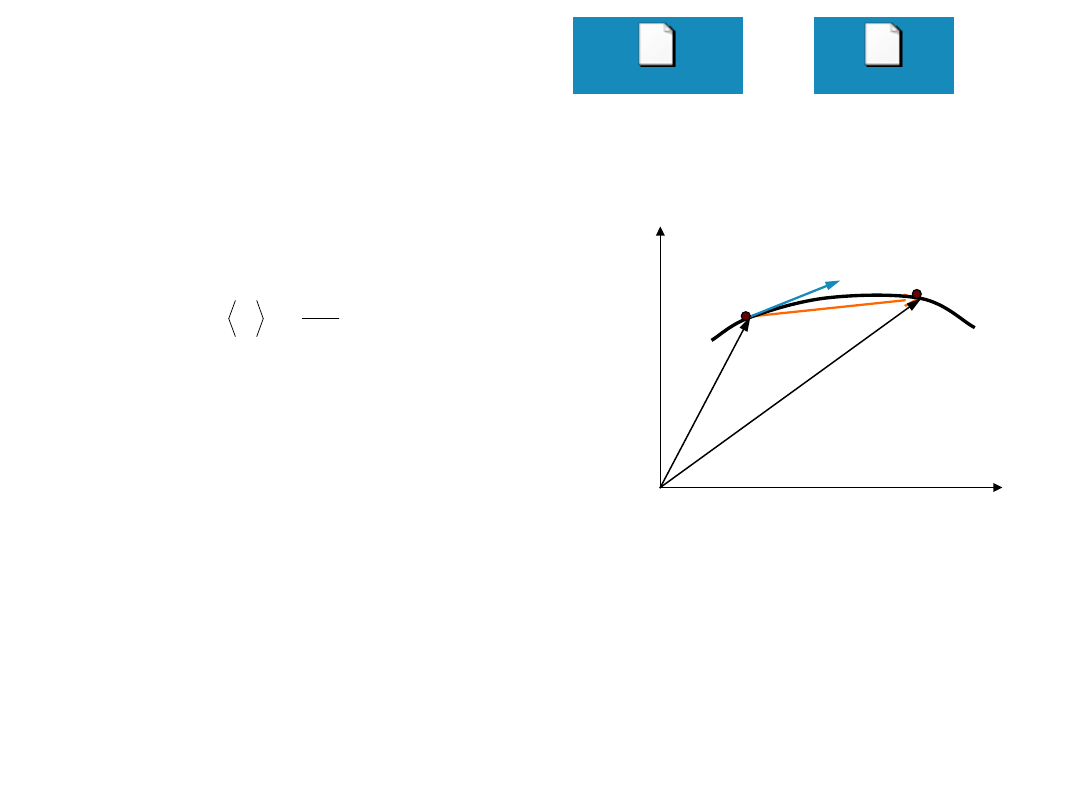
Prędkość
cząstka porusza się po krzywoliniowym torze z punktu A
do B w czasie t przebywając drogę s
• prędkość średnia
• prędkość chwilowa
24
t
r
v
dt
r
d
t
r
v
t
lim
0
k
dt
dz
j
dt
dy
i
dt
dx
dt
r
d
v
k
v
j
v
i
v
v
z
y
x
2
2
2
z
y
x
v
v
v
v
y
x
A
B
t
r
r
r
t
t
r
r
s
v
tor
ProjKinematics.s wf
z
y
x
v
v
v
v
,
,
m
t
t
r
3
3
2
2
,
,
k
dt
t
d
j
dt
d
i
dt
t
d
dt
r
d
v
3
3
2
2
Przykład:
3
0
4
,
,
t
v
s
t
Dla
1
3
0
4
1
,
,
s
v
s
m
v
5
25
3
0
4
2
2
2
wartość
prędkości
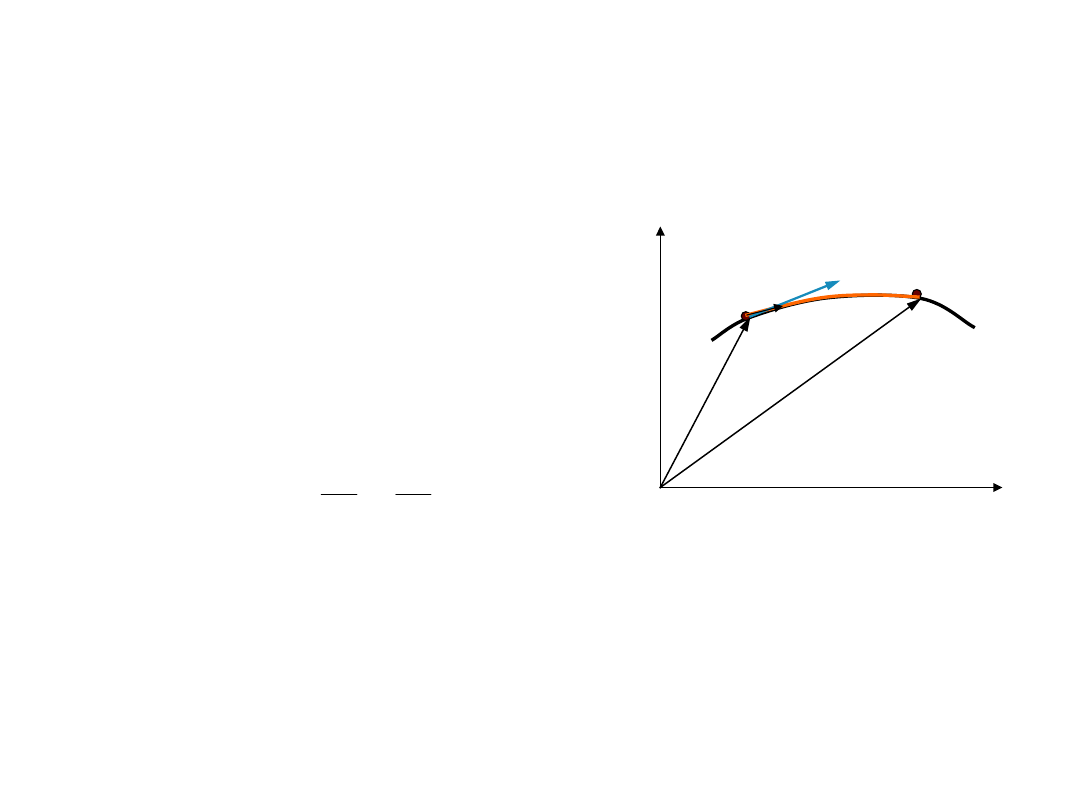
Prędkość
cząstka porusza się po krzywoliniowym
torze z punktu A do B w czasie t
przebywając drogę s
• wartość liczbowa prędkości
jest równa pochodnej drogi
względem czasu
25
dt
ds
t
s
v
t
lim
0
y
x
A
B
t
r
r
r
t
t
r
r
s
v
tor
t
i
v
v
t
i
toru
do
styczny
wektor
i
t
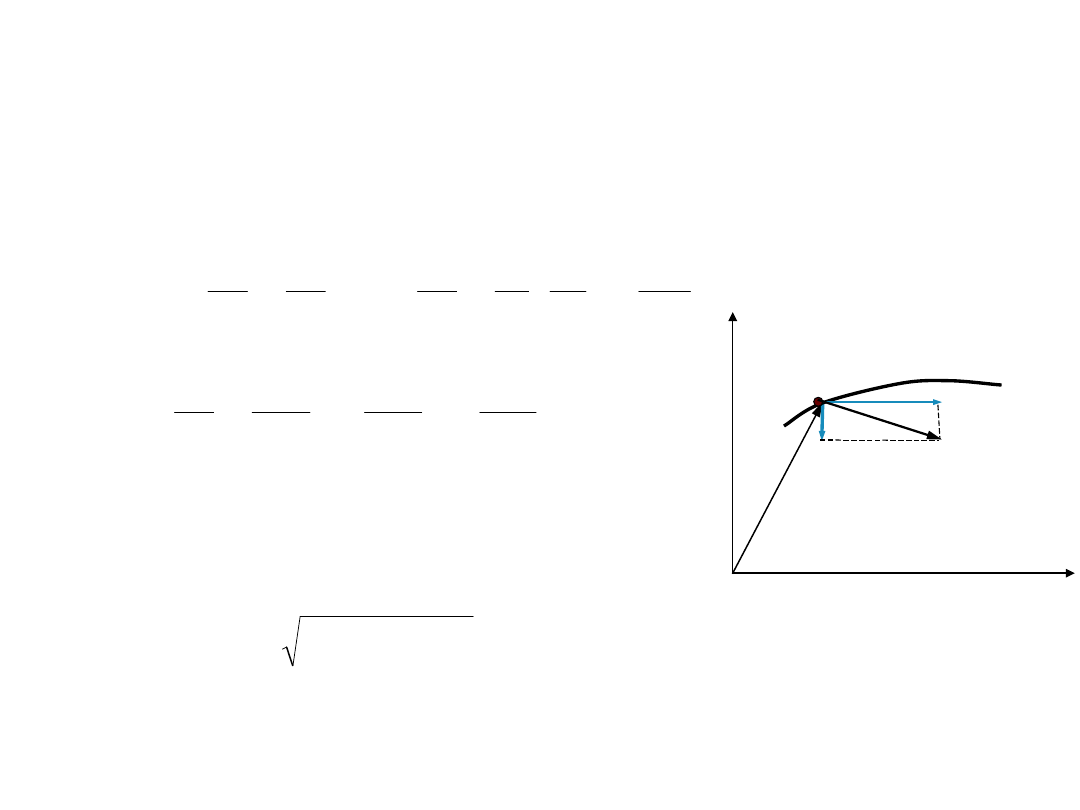
Przyspieszenie
26
dt
v
d
t
v
a
t
lim
0
2
2
dt
r
d
dt
r
d
dt
d
dt
v
d
a
y
x
t
r
a
x
a
tor
y
a
k
dt
dv
j
dt
dv
i
dt
dv
dt
v
d
a
z
y
x
k
a
j
a
i
a
a
z
y
x
2
2
2
z
y
x
a
a
a
a
z
y
x
a
a
a
a
,
,
wartość
przyspieszenia
y
x
a
a
a
,
6
2
4
,
cos t
a
2
3
2 t
t
r
,
cos
t
t
v
6
2
2
,
sin
Przykład:
Przyspieszenie styczne i
normalne
27
t
i
v
v
v
dt
i
d
i
dt
dv
i
v
dt
d
a
t
t
t
n
t
a
a
a
dt
dv
a
t
R
v
v
dt
di
a
t
n
2
przyspieszenie styczne
szybkość zmiany wartości v
przyspieszenie normalne
szybkość zmiany kierunku ruchu
(R – promień krzywizny)
y
x
t
r
a
t
a
tor
n
a
2
3
2 t
t
r
,
cos
t
t
v
6
2
2
,
sin
Przykład:
2
2
36
2
2
t
t
v
sin
2
2
36
2
2
2
72
2
2
2
4
t
t
t
t
t
dt
dv
a
t
sin
cos
sin
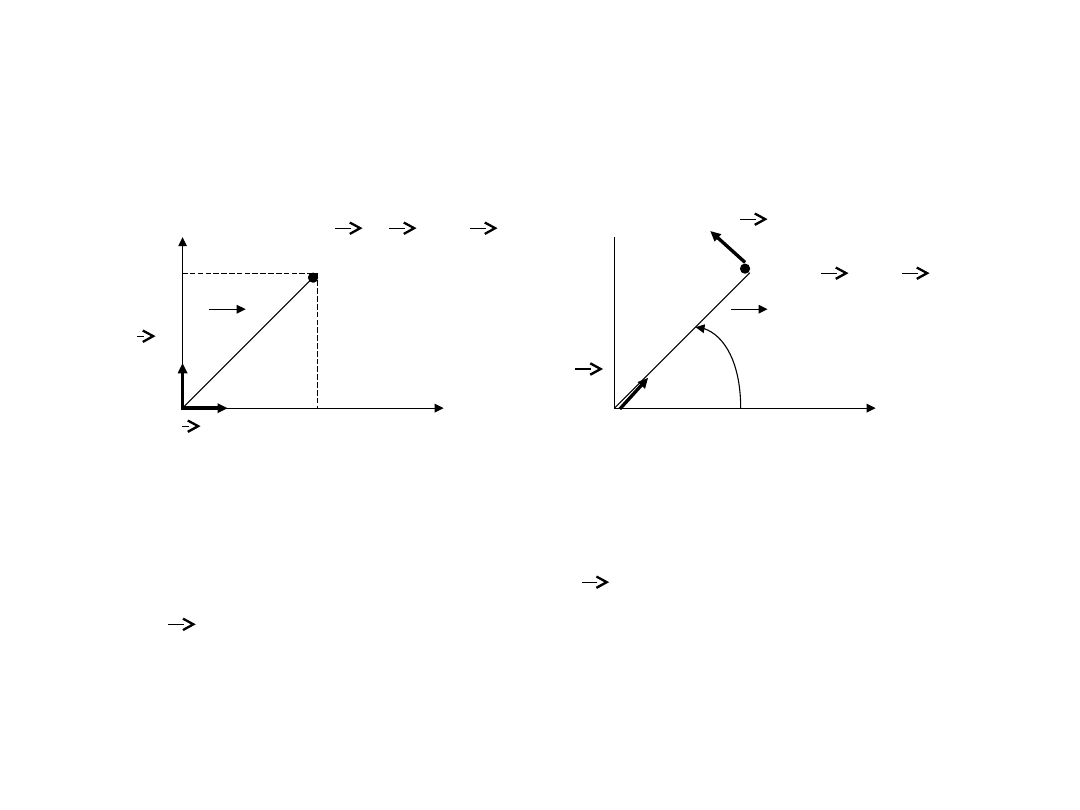
Ruch jednostajny
po okręgu
28
Ruch po okręgu - przypadek ruchu
krzywoliniowego, gdy promień jest stały
r=const. i wartość prędkości nie zmienia się
j
v
i
v
j
v
i
v
v
y
x
cos
sin
r
x
cos
r
y
sin
j
r
x
v
i
r
y
v
v
j
v
r
v
i
v
r
v
j
dt
dx
r
v
i
dt
dy
r
v
dt
v
d
a
x
y
j
r
v
i
r
v
a
sin
cos
2
2
r
v
r
v
a
a
a
y
x
2
2
2
2
2
2
sin
cos
Przyspieszenie
dośrodkowe
Ruch jednostajny
po okręgu
29
Ruch po okręgu – obliczmy
przyspieszenie styczne i normalne
j
v
i
v
j
v
i
v
v
y
x
cos
sin
v
v
v
v
2
2
2
2
cos
sin
0
dt
dv
a
t
r
v
v
dt
di
a
t
n
2
sin
,
cos r
r
r
cos
,
sin
dt
d
r
dt
d
r
v
dt
r
d
v
d
r
ds
cos
,
sin
dt
ds
dt
ds
v
cos
,
sin v
v
v
dt
d
r
v
r
v
r
v
s
r
v
r
v
r
r
v
r
a
n
2
2
2
2
- prędkość kątową
Przyspieszenie liniowe:
tożsamość
Przyspieszenie normalne (dośrodkowe)
a
t
a
n
dt
d
dt
r
d
dt
r
d
dt
v
d
a
r
r
r
r
v
dt
r
d
2
0
r
s
r
v
W układzie biegunowym do opisu ruchu stosujemy:
- położenie kątowe
Ruch jednostajny
po okręgu
30
r
d
ds
)
(
)
(
)
(
b
a
c
c
a
b
c
b
a
v
0x
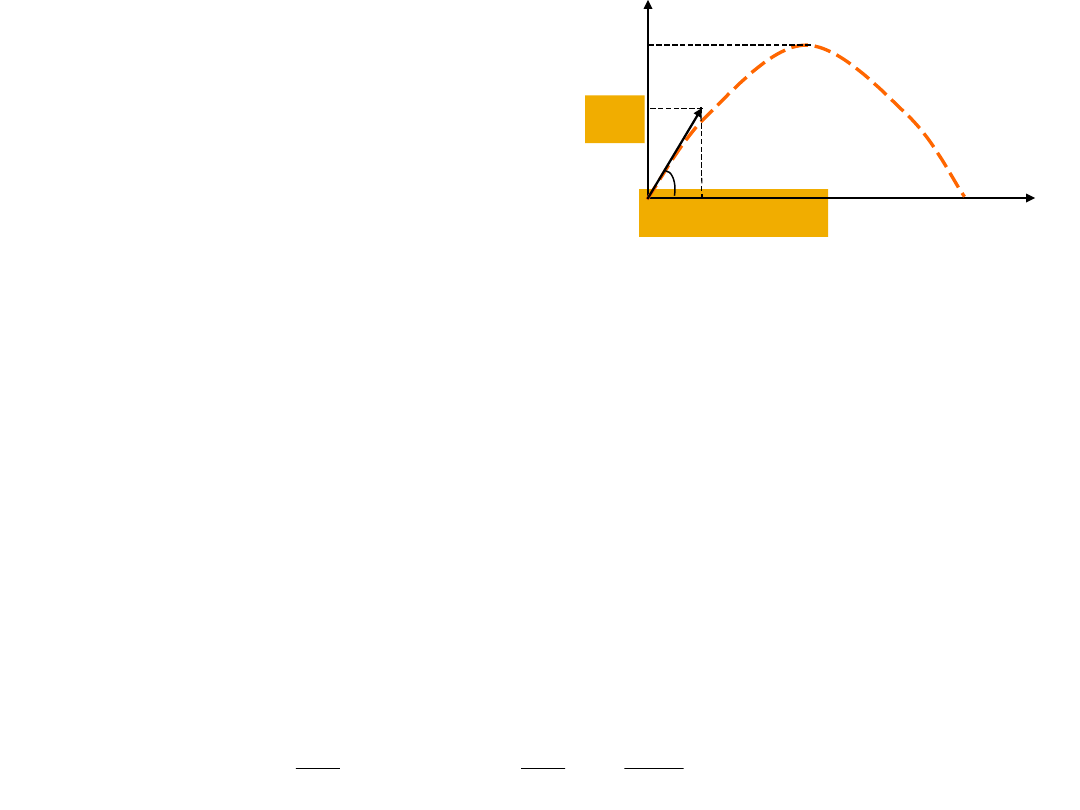
Rzut ukośny
31
ruch w płaszczyźnie pionowej z prędkością początkową v
0
i z
przyspieszeniem ziemskim g
w rzucie ukośnym ruch cząstki w kierunku poziomym i kierunku
pionowym można traktować jako niezależne – żaden z nich nie
wpływa na drugi
ruch w poziomie: v
0x
= const. x = x
0
+ v
0x
t x
0
=0
ruch w pionie: a = -g y = y
0
+ v
0y
t –gt
2
/2 y
0
=0
wektor prędkości początkowej możemy przedstawić w postaci
sumy jego składowych w kierunku poziomym x i pionowym y
gdzie v
0x
=v
0
cos
0
v
0y
=v
0
sin
0
y
x
x
max
v
0y
y
max
0
j
v
i
v
v
y
x
0
0
0
x
v
x
t
0
2
0
2
0
0
2
x
x
y
v
x
g
v
x
v
y
jest to równanie toru
v
0x
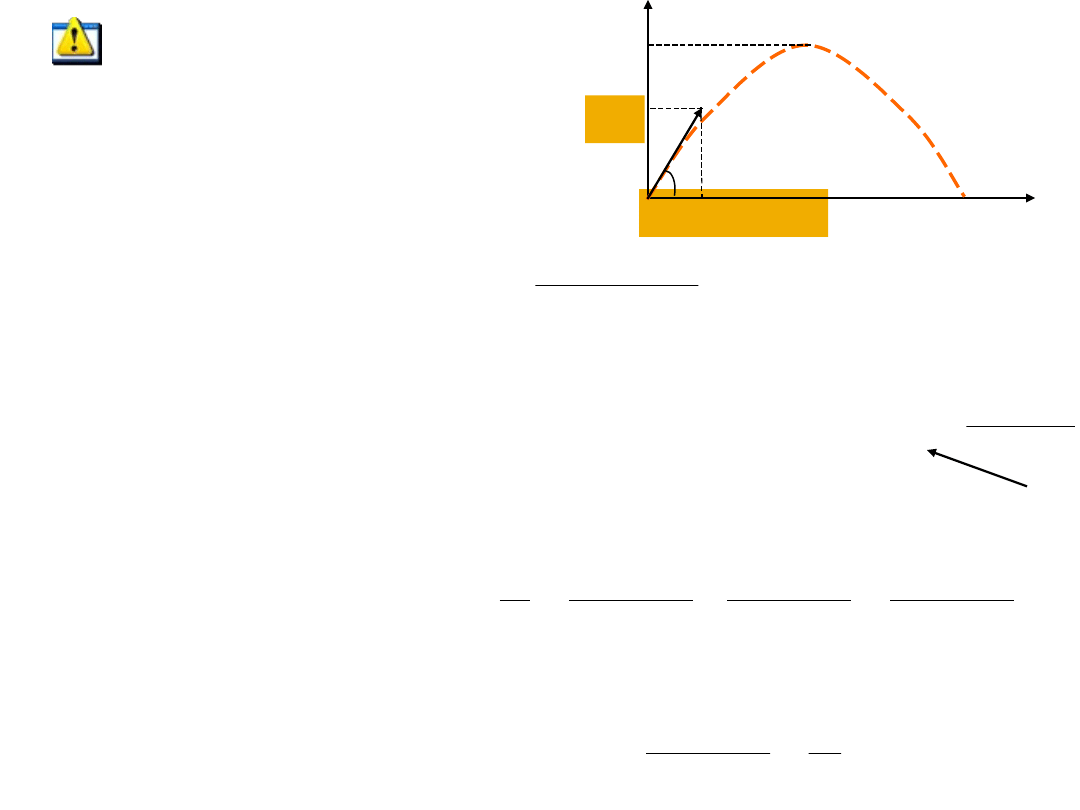
Rzut ukośny
32
ruch w poziomie: v
x
= v
0x
=v
0
cos
0
ruch w pionie: v
y
= v
0y
– gt = v
0
sin
0
– gt
równanie toru:
równanie paraboli
2
0
0
2
0
2
cos
v
gx
x
tg
y
zasięg rzutu:
0
2
0
0
0
0
0
2
2
sin
sin
cos
max
g
v
g
v
v
t
x
x
c
y
x
x
max
v
0y
y
max
0
maksymalna wysokość: y
max
gdy v
y
= 0 czyli 0 = v
0
sin
0
– gt
w
g
v
t
w
0
0
sin
g
v
g
v
g
v
t
g
t
v
t
y
y
w
w
w
2
2
2
0
2
2
0
0
2
2
0
0
2
2
0
2
0
0
sin
sin
sin
sin
max
ponieważ t
w
=t
s
to t
c
=2t
w
Rzut.exe
Rachunek całkowy
Rachunek całkowy
Całkowanie jest działaniem odwrotnym względem
różniczkowania. Polega na znalezieniu dla badanej funkcji
f(x) tzw. funkcji pierwotnej F(x) która w każdym punkcie
badanego przedziału spełnia równość F’(x) = f(x)
Funkcja pierwotna jest wyznaczana z dokładnością do
dowolnej stałej C, gdyż (F(x)+C)’=f(x)
Sumę F(x)+C nazywamy całką nieoznaczoną f(x) i
oznaczamy symbolem
dx
x
f
)
(
dx
......
symbol całkowania
funkcja zmienna
podcałkowa całkowania
Całka oznaczona
Jeżeli F(x) jest funkcją pierwotną funkcji f(x) to całką
oznaczoną funkcji f(x) w przedziale [a,b] nazywamy
)
(
)
(
)
(
)
(
a
F
b
F
x
F
dx
x
f
b
a
b
a
górna
dolna
granica
całkowania
Przykład:
5
7
1
4
2
1
2
1
2
2
4
1
2
4
1
,
x
dx
x
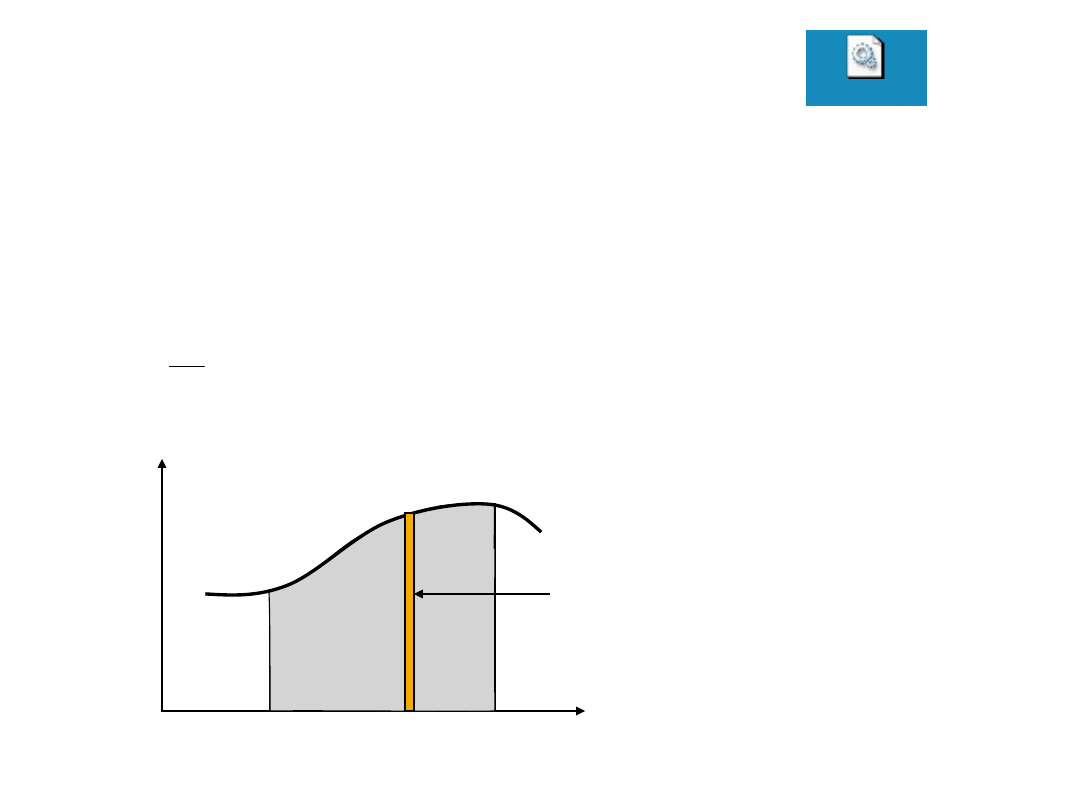
Całka jako suma
znajomość prędkości pozwala obliczyć drogę
przebytą przez punkt materialny
dt
ds
v
dt
v
ds
2
1
t
t
dt
v
s
v
t
t
1
t
2
s
v(t)
całka oznaczona
t
i
s
i
i
i
i
i
i
t
v
s
s
v
i
całka oznaczona
równa jest polu pod
krzywą
Integrals.swf
Podstawowe wzory
C
x
dx
x
cos
sin
C
x
dx
1
C
ax
dx
a
C
n
x
dx
x
n
n
1
1
C
x
dx
x
ln
1
...
,
,
718
2
e
C
e
dx
e
x
x
C
dx
0
C
x
dx
x
sin
cos
Przykłady:
2
3
3
2
3
1
3
1
x
C
x
bo
C
x
dx
x
l
,
C
y
C
y
dy
y
dy
y
1
1
1
1
2
2
C
t
dt
t
5
5
1
5
cos
sin
Równanie różniczkowe typu ma rozwiązanie
ogólne postaci
Równania różniczkowe
Równania różniczkowe
x
f
dx
dy
dx
x
f
y
dx
x
f
dy
dx
x
f
dy
dx
x
f
y
Przykład:
t
e
y
2
'
t
e
dt
dy
2
dt
e
y
t
2
C
e
y
t
2
2
1
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
Wyszukiwarka
Podobne podstrony:
02 podstawowe definicje
10 02 podstawy endokrynologi
Politechnika Białostocka 02 Podstawowe pneumatyczne układy sterowania ręcznego
02 Podstawy Marketingu 1 Students
02 02 podstawy statyki zadanie 02
02 Podstawy działania sieci komputerowych, Wprowadzenie, Wprowadzenie
02 Podstawowe
Wykład 02, Podstawy Zarządzania UG, wykłady prof. hab Rybicki
2009 02 Podstawowa kinezyterapia u kobiet po mastektomii
02 PODSTAWOWE POJĘCIA
02 Podstawy
JS 02 Podstawowe okienka, Programowanie, instrukcje - teoria
02 podstawy rynków finansowychid 3433 ppt
02 Podstawy modelowania
2009 02 Podstawy MySQL [Poczatkujacy]
02 Podstawowe Zabiegi Resuscytacyjne & Automatyczna Defibrylacja Zewnętrzna (BLS&AED)
02 Podstawy dynamiki[2]
więcej podobnych podstron