
METODY
KOMPUTEROWE W
MECHANICE
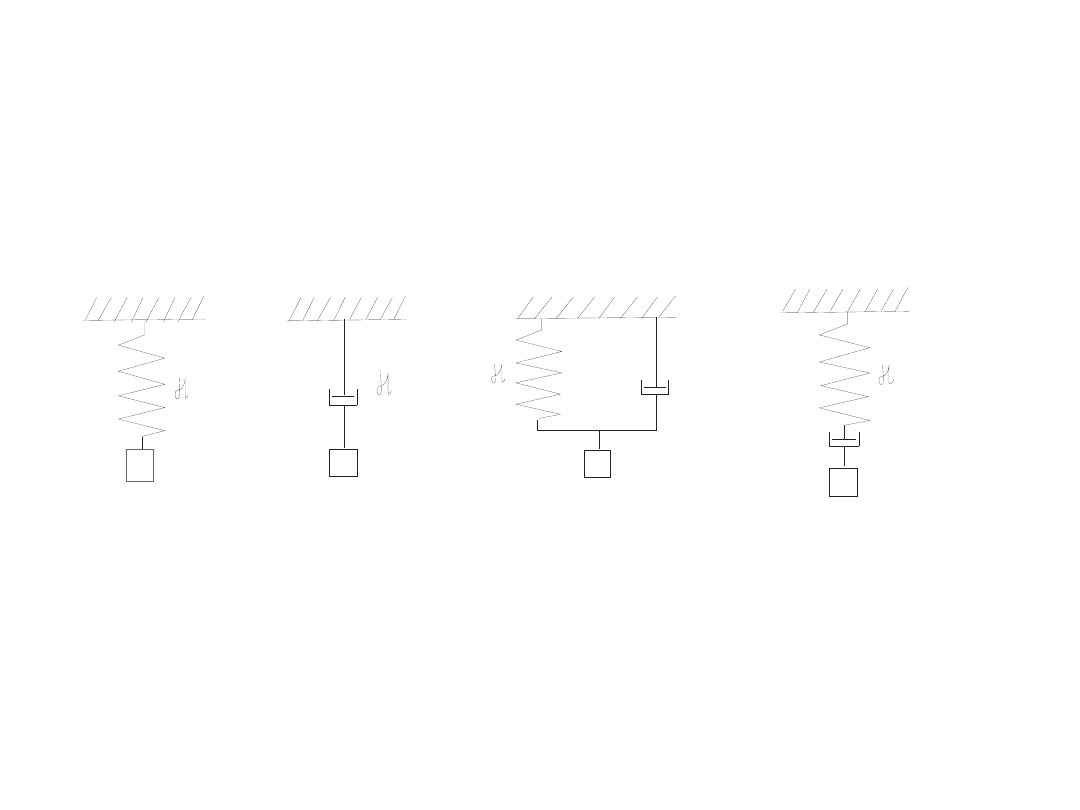
MODELE DRGAŃ
Hooke
Newton
Voigt-Kelvin
Maxwell
P
o
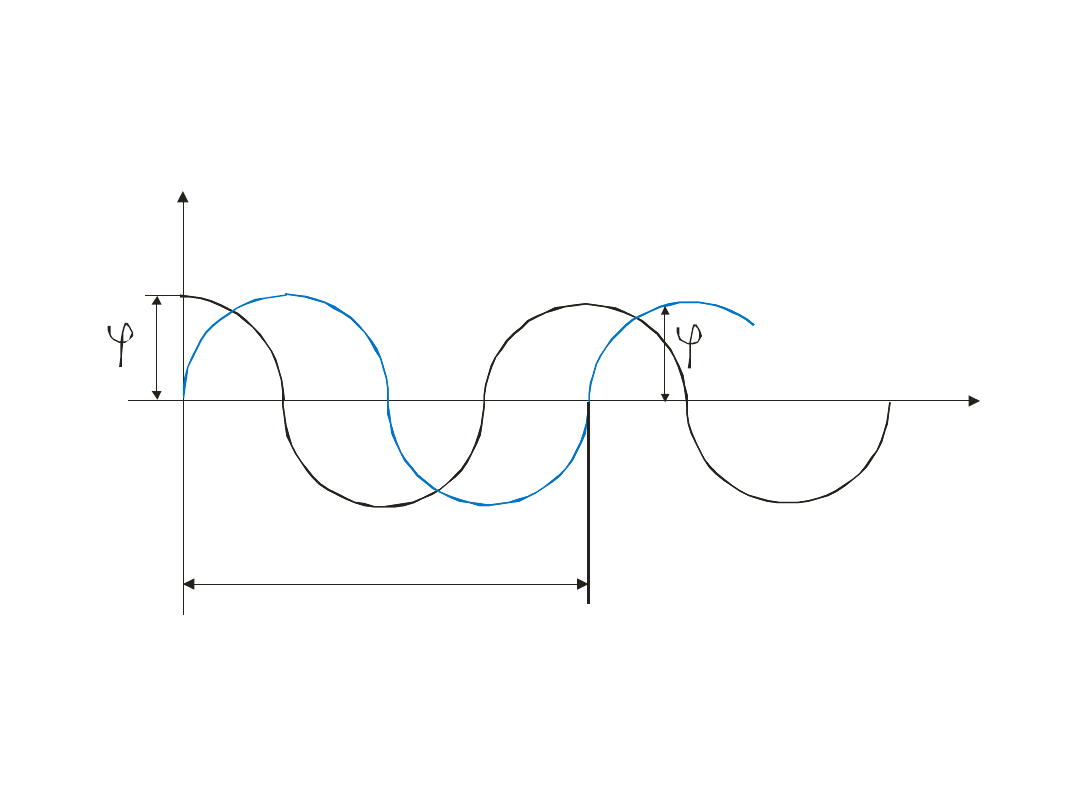
– przesunięcie fazowe,
a
p
- amplituda max,
f – częstotliwość drgań (ilość wahnięć na sekundę),
x(t) – wychylenie,
x – współrzędna, która określa chwilowe położenie ruchomego
punktu,
T – czas,
x˙ - prędkość
ω – częstotliwość drgań
χ - współczynnik proporcjonalności pomiędzy siłą a
wychyleniem
s
rad
T
2Π
dt
dx
x
s
1
T
1
f
)
t
cos(
a
x(t)
t
cos
a
x(t)
T)
(t
x
(t)
x
T)
x(t
x(t)
0
p
p
Klasyfikacja i podział drgań
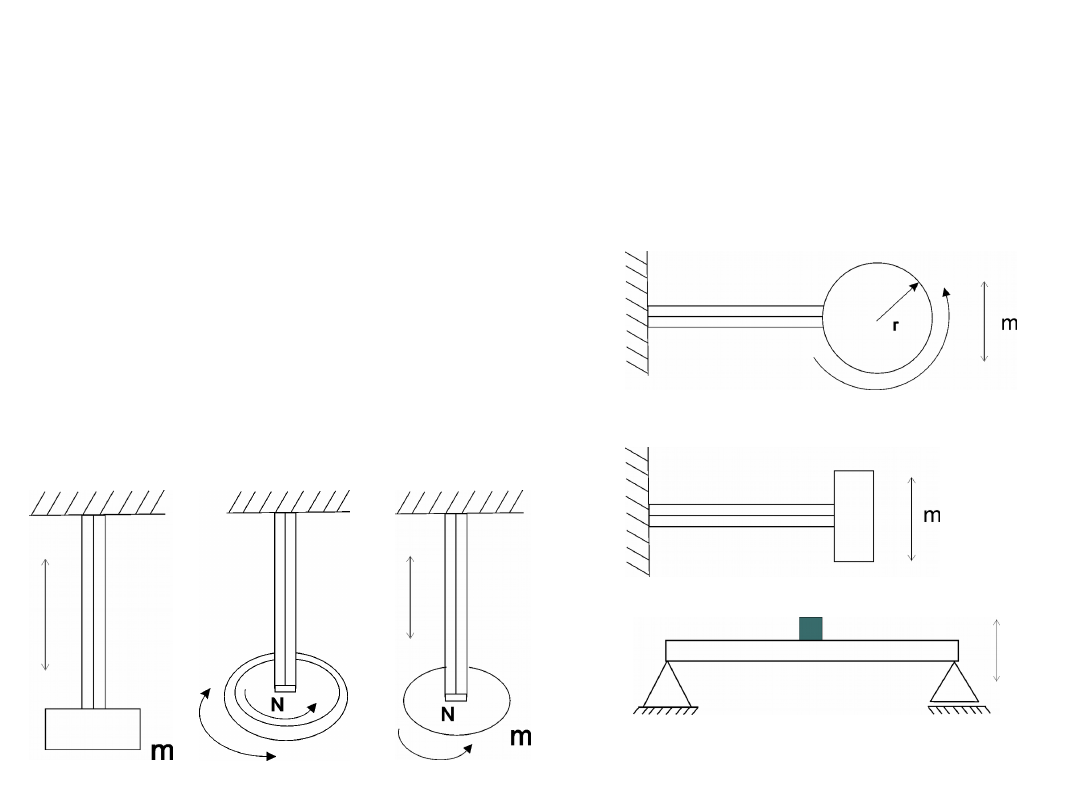
1. Ze względu na ilość stopni swobody.
s – ilość niezależnych uogólnionych
współrzędnych, których określają
chwilowe położenie układu.
a) Drgania o 1 stopniu swobody
b) Drgania o 2 stopniach swobody.
c) Drgania o 3 stopniach swobody.
d) Drgania o 4 stopniach swobody.
e) Drgania o wielu stopniach swobody.
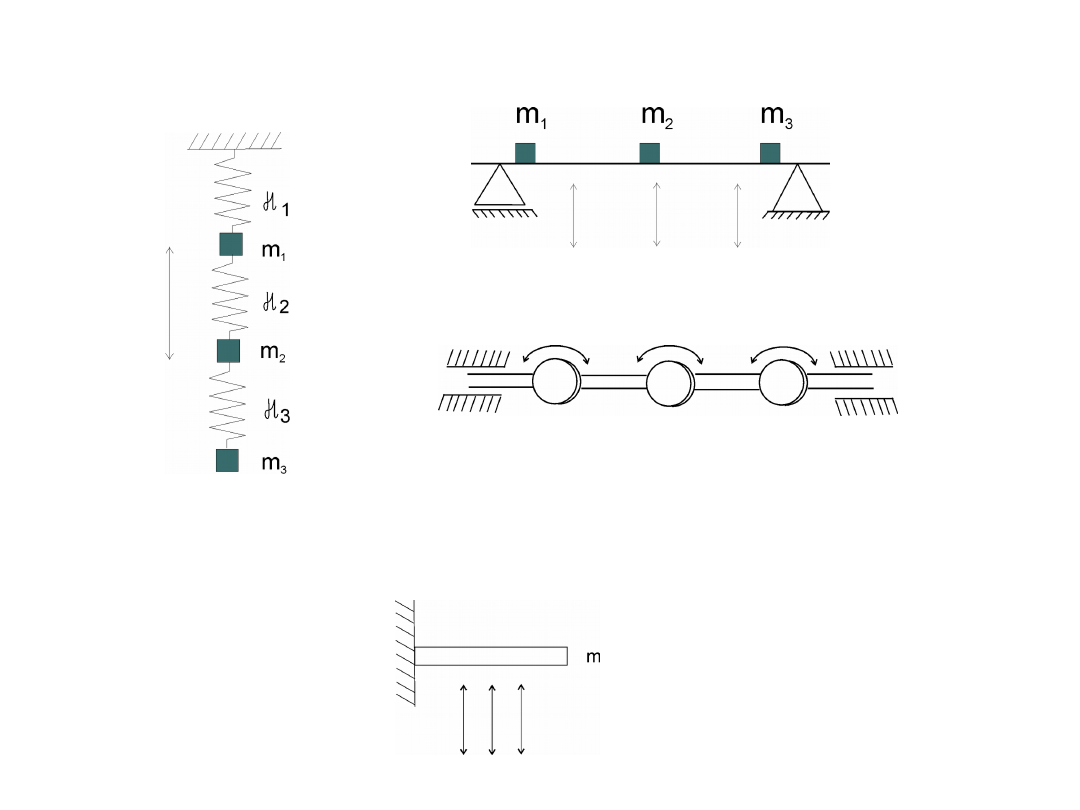
Drgania o skończonej ilości stopni swobody
Drgania podłużne
Drgania poprzeczne
Drgania skrętne złożone i dowolne
Drgania o nieskończonej ilości stopni swobody

2. Ze względu na charakter odkształceń sprężystych drgającego układu.
a) drgania podłużne
b) drgania poprzeczne (gięte)
c) drgania skrętne
d) drgania złożone
e) drgania dowolne
3. Ze względu na przyczyny wywołujące drgania.
a) Drgania własne (swobodne) – Są to drgania, które wywołane są jednorazowym wytrąceniem układu z położenia równowagi sprężystej.
b) Drgania wymuszone – Są to drgania, które wzbudzone są siłami zewnętrznymi, zmieniającymi się w czasie T.
P(t) = P0 sinγt
P0 – stała siła
γ- częstość drgań
t – czas
P(t) – drgania wymuszone
c) Drgania parametryczne – Są to drgania, które są wywołane okresową zmianą parametru układu np.: jego sztywność.
P(t)=P0sinγt
d) drgania samowzbudne – Są to drgania, które wzbudzane są przez siły spowodowane samym ruchem np.: siły tarcia.
4. Ze względu na możliwości
występowania oporów.
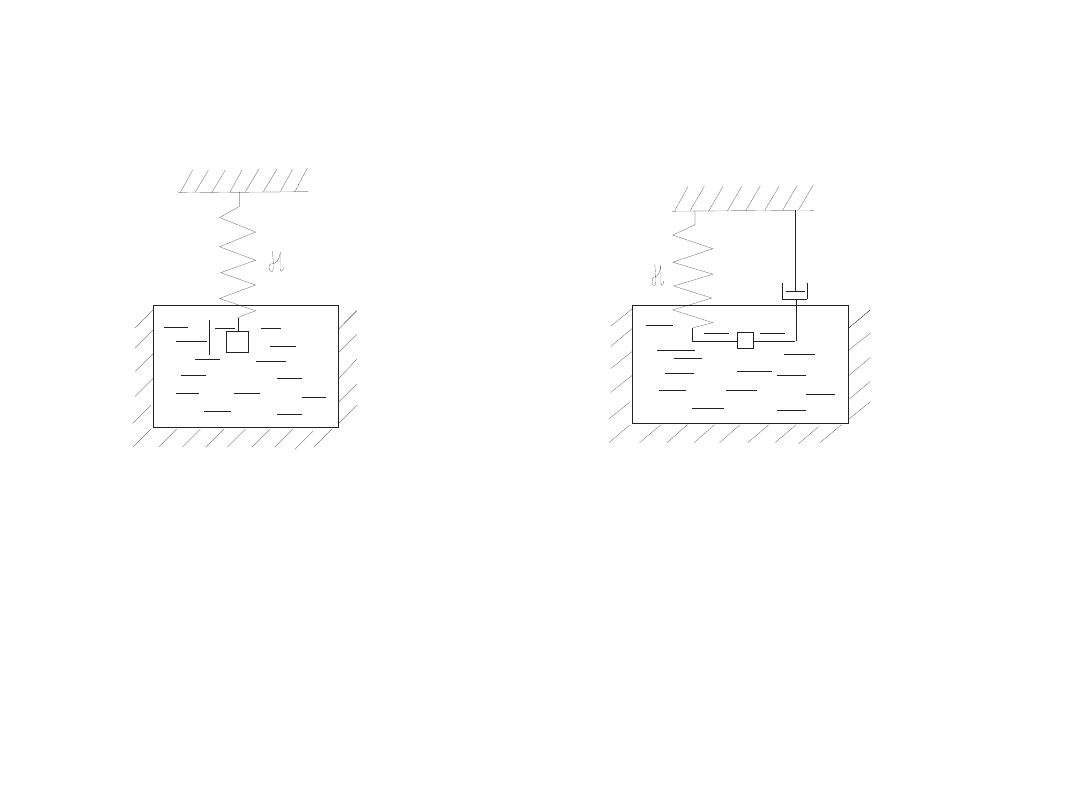
Modele drgań
5. Ze względu na opis matematyczny ruchu.
a) Drgania tłumione – to takie ,gdzie występuje opór.
Szeregowy model Maxell-a
b) Drgania nietłumione – bez oporów.
równoległy model Voight-Kelvin-a
Stałe sprężystości układu o jednym stopniu swobody.
s – uogólnione przemieszczenie
S – uogólniona siła
χ- stała sprężystości
Stałą sprężystości (χ) układu o jednym stopniu swobody nazywamy iloraz uogólnioną
siły do uogólnionego przemieszczenia w miejscu przyłożenia siły w kierunku jej
działania.
a) Ruch postępowy
b) Ruch obrotowy
zenie
przemieszc
siłi
m
N
x
P
kąą
moment
rad
Nm
M
Stałe sprężystości układu o wiązaniach połączonych.
a) Połączenie szeregowe.
st.sprężystości zastępcza
Połączenie szeregowe podstawowy warunek to inaczej warunek przemieszczeń. Pod
xxxxxxxxxxxxxxx obciążeniem i całkowitym przemieszczeniem równe jest
xxxxxxxxxxxxxxx
i
i
i
i
i
i
z
i
i
i
i
p
i
S
x
Q
S
S
S
Q
x
Q
x
x
x
x
x
x
...
1
1
...
1
1
1
...
...
2
1
2
1
2
1
2
1
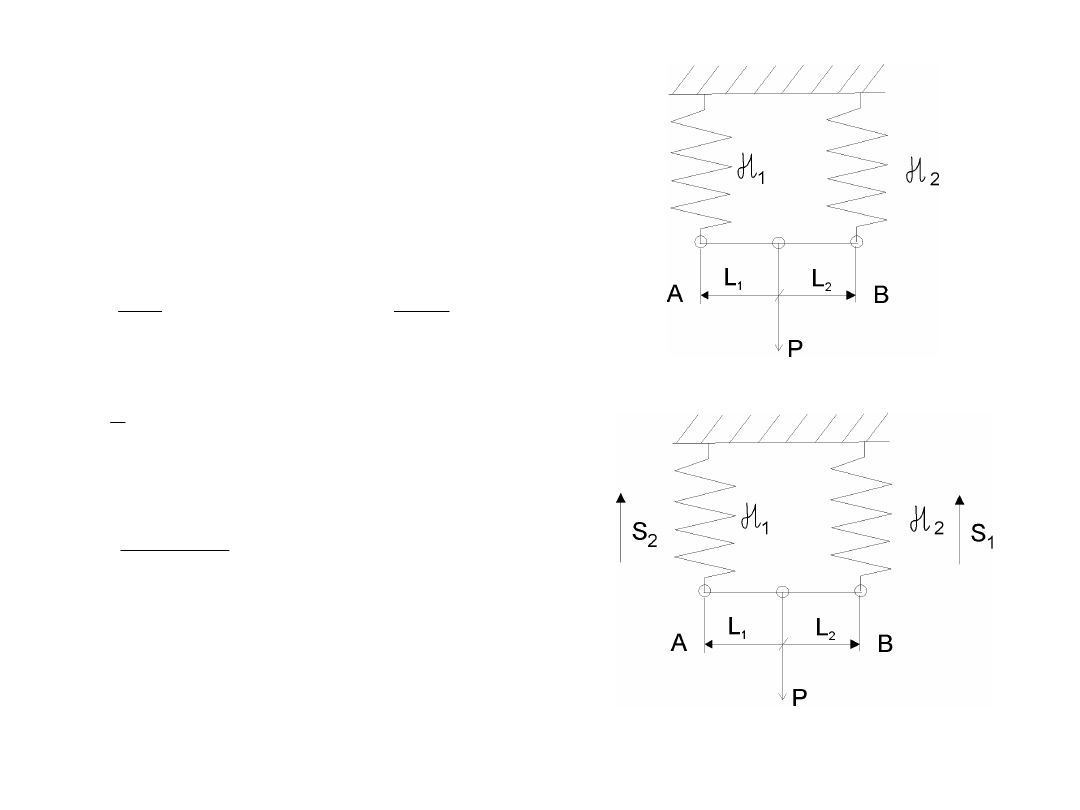
b) Połączenie równoległe.
Warunki równowagi
x - przemieszczenie
- wydłużenie sprężyn
- st.sprężystości zastępcza
2
2
2
1
2
1
2
i
z
2
1
1
2
1
2
2
1
df
2
1
2
1
2
2
2
1
1
1
1
2
1
2
2
1
2
1
χ
λ
χ
λ
χ
χ
χ
x
λ
x
λ
x
Pλ
S
,
Pλ
S
χ
P
x
1
λ
λ
l
l
l
λ
,
l
l
l
λ
0
)Pl
l
(l
S
0
P
*
S
S
λ
,
λ
l
l
l
l
3
1
3
2
2
1
E
E
E
2
1
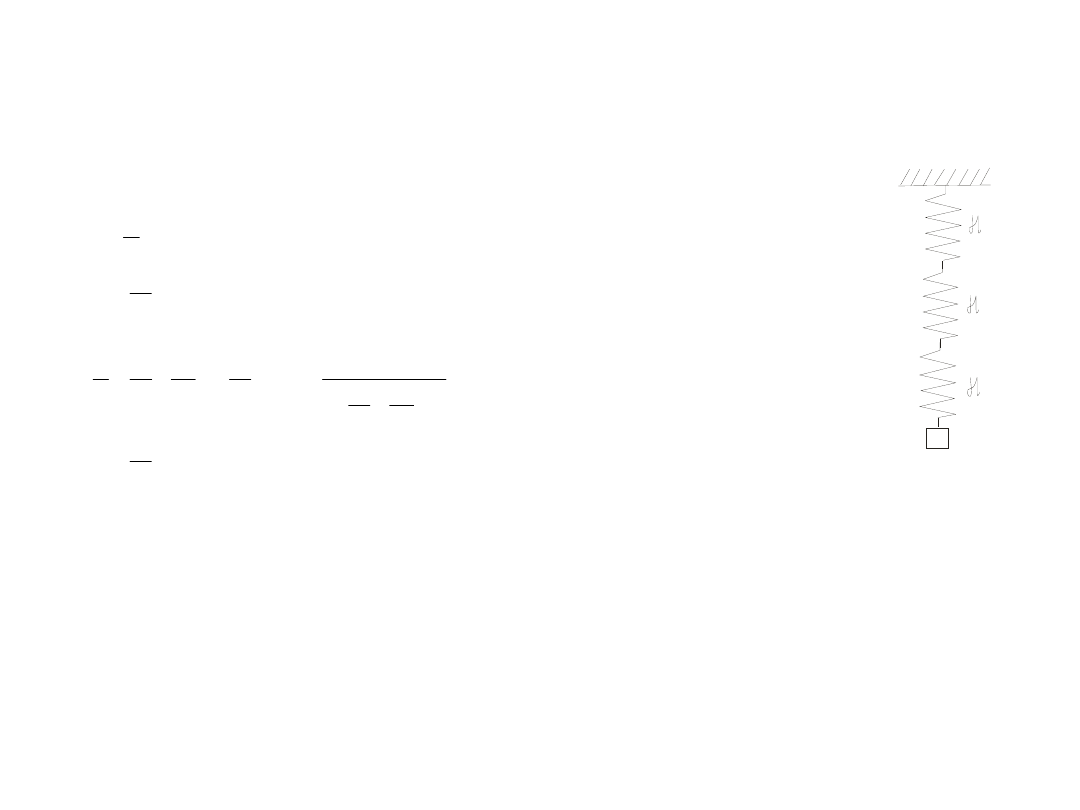
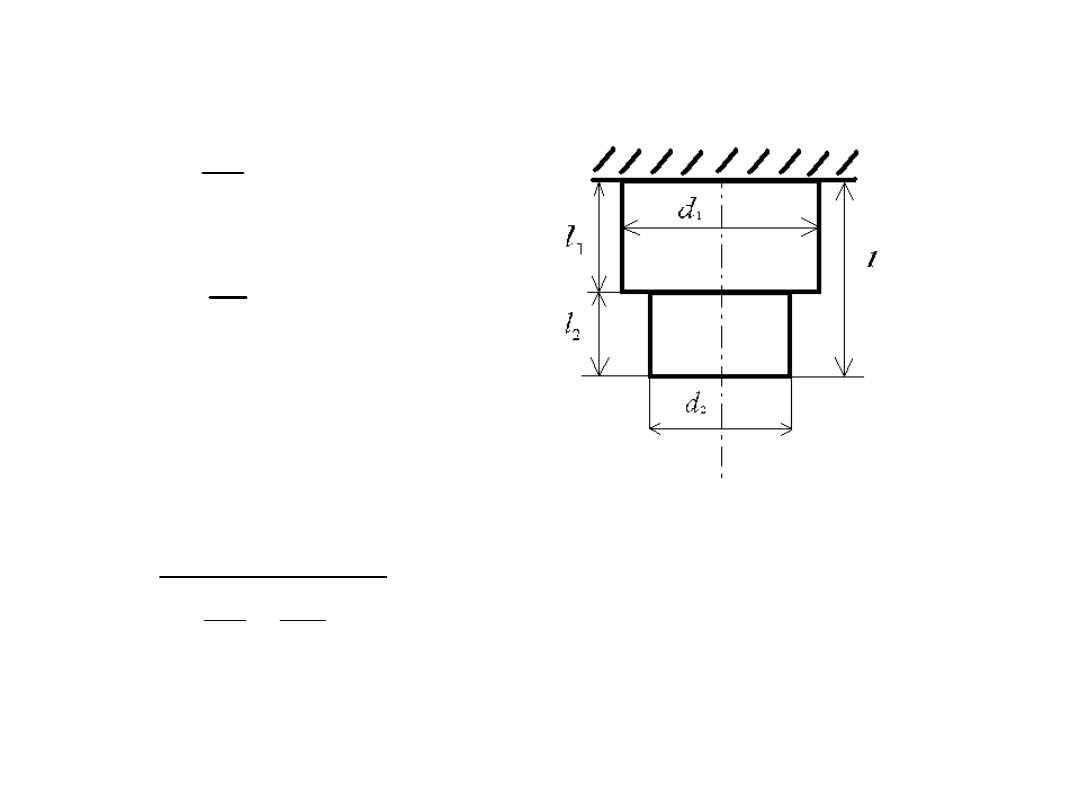
Zad. 1 Określić zastępczą siłę sprężystości H
2
.
2
1
1
2
1
H
H
H
H
H
H
i
i
2
i
s
S
H
x
Q
H
2
2
1
2
2
2
l
EF
l
Q
EF
Ql
l
2
2
1
1
l
Q
H
l
Q
H
4
4
2
2
2
2
1
1
d
F
d
F
m
N
l
EF
H
1
1
1
m
N
l
EF
H
2
2
2
1
2
2
2
2
1
1
2
2
1
2
2
1
1
2
1
4
4
l
d
l
d
l
F
l
F
l
EF
l
EF
H
H
Czyli:
1
2
2
2
2
1
1
1
2
1
l
d
l
d
l
EF
H
rad
l
EF
d
d
l
l
l
EF
H
2
1
2
2
2
1
1
2
1
1
2
1
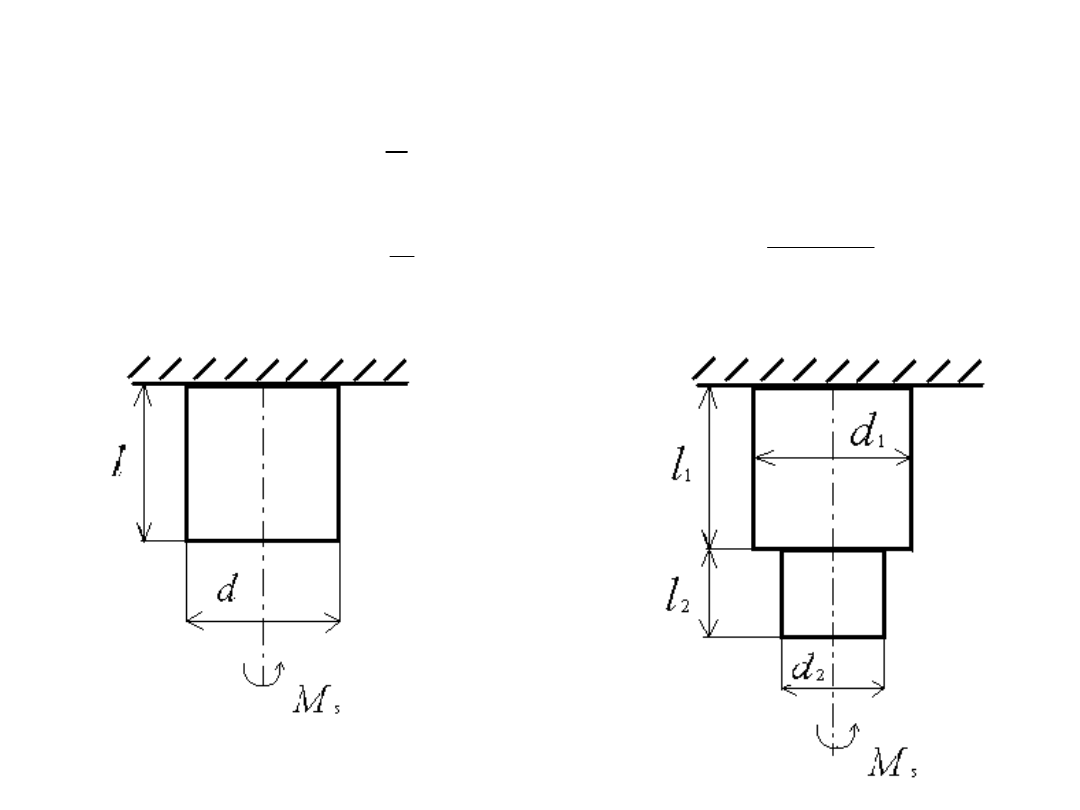
Zad. 2 Określić zastępczą stałą sprężystości gdy
mm
d
mm
d
10
14
2
1
l
l
l
l
3
2
3
1
2
1
E
E
E
2
1
)
1
(
2
E
G
I
II
0
GI
l
M
S
S
32
4
0
d
I
rad
Nm
l
GI
M
0
1
01
1
l
GI
2
02
2
l
GI
32
4
1
01
d
I
32
4
2
02
d
I
4
2
1
2
1
2
1
d
d
l
l
2
1
1
2
1
Dla ruchu obrotowego:
red
l
GI
d
d
GI
l
l
l
2
01
4
2
1
1
2
1
01
2
1
Analiza wyników
m
l
d
d
l
l
l
l
red
33
,
1
1
2
2
1
1
2
1
2
m
l
d
d
l
l
l
l
red
94
,
1
1
4
2
1
1
2
1
2
Sztywność układu
0
GI
Przy skręcaniu jest większa
niż przy rozciąganiu
0
0
EI
GI
Zmiana średnicy pręta ma większy wpływ przy
skręcaniu na podatność w porównaniu z
rozciąganiem
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
Wyszukiwarka
Podobne podstrony:
METODY KOMPUTEROWE W MECHANICE 2
METODY KOMPUTEROWE W MECHANICE1
METODY KOMPUTEROWE W MECHANICE 2
Metody komputerowe w inzynierii materiałowej 6
Fifyka komputerowa, Mechanika i Budowa Maszyn PWR MiBM, Semestr I, Fizyka, fiza
Metody Komputerowe i Numeryczne, Równania różniczkowe zwyczajne
Metody Komputerowe i Numeryczne, Równania nieliniowe
Metody komputerowe wykład 1
Metody Komputerowe, K-tar.wyn, ELEMENT NR 41
Metody Komputerowe, TARCZA.DAT
Metody komputerowe w inzynierii materiałowej 8
Metody komputerowe wykład 2
Metody komputerowe wer 0 8
Metody Komputerowe i Numeryczne, Aproksymacja
Metody komputerowe, PAKO
więcej podobnych podstron