
GEODEZJA
WYKŁAD
Teoria błędów
Katedra Geodezji im. K. Weigla
ul. Poznańska 2/34

TEORIA BŁĘDÓW
Twórca teorii błędów
CARL FRIEDRICH GAUSS
niemiecki matematyk i astronom, w 1799 doktor
matematyki Uniwersytetu Helmstedt.
Wydał dwutomowe dzieło (1844 i 1847) z dziedziny
geodezji.
Pierwsze prace z zakresu teorii błędów w geodezji:
- postulat
Legendre’a
– met. najmn. kwadratów
- hipotezy Hagena o rozkładzie błędów

Błędy pomiarów i ich charakterystyka
Błąd prawdziwy
obserwacji - różnica między
nieznanym wymiarem X (prawdziwą wartością)
mierzonej
wielkości i wynikiem pomiaru L
i
= X - L
Źródła błędów:
- niedoskonałość zmysłów obserwatora,
- narzędzia pomiarowe (dalmierz, teodolit, niwelator)
- warunki pracy, czyli środowisko (temperatura,
ciśnienie, wilgotność, wiatr, opady, promieniowanie
słoneczne).
Ogólna klasyfikacja błędów obserwacji:
-
błędy grube
(omyłki),
-
systematyczne
,
-
przypadkowe (losowe)
.

Rozkład błędów przypadkowych
Błędy przypadkowe są
zmiennymi losowymi
.
Charakteryzuje je
rozkład normalny
zwany
rozkładem
Gaussa-Laplace'a
N(μ,σ).
Jest to najczęściej spotykany w naturze
rozkład zmiennej losowej ciągłej.
Rozkład normalny ma dwa parametry:
-
μ – wartość oczekiwana,
-
σ – odchylenie standardowe
.
Funkcja gęstości rozkładu normalnego
2
2
1
(
)
( )
exp(
)
2
2
x
f x
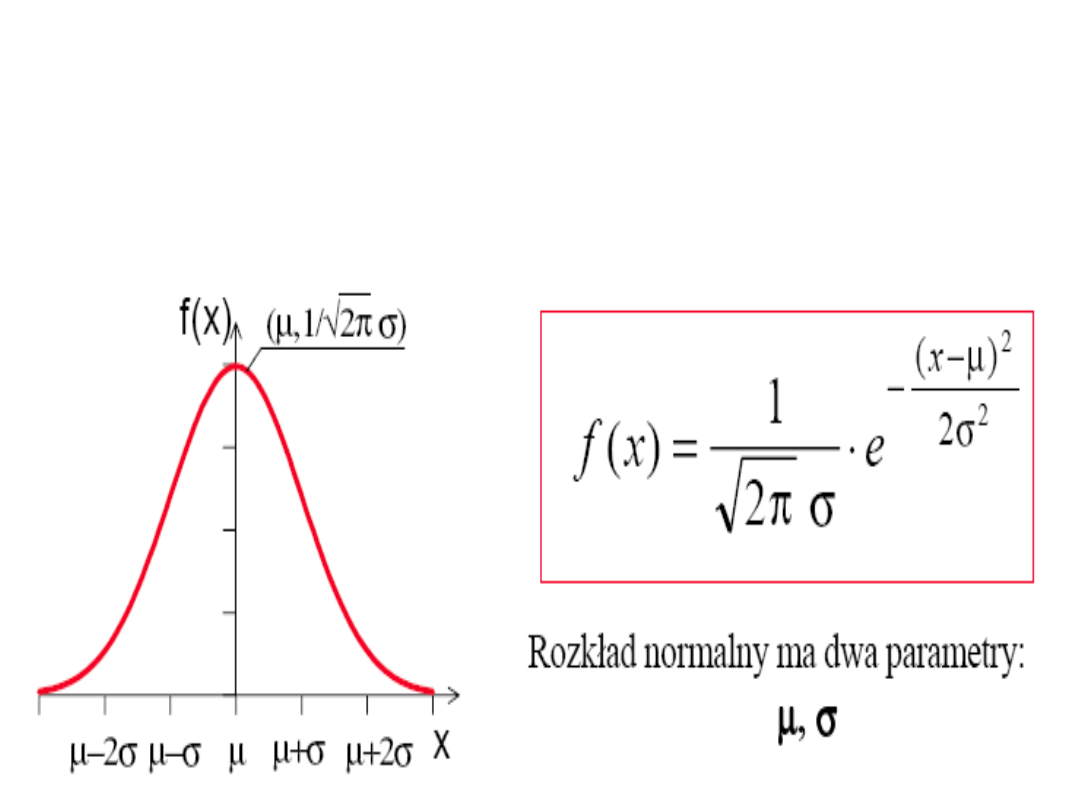
Wykres funkcji gęstości rozkładu normalnego
dla parametrów μ,σ.
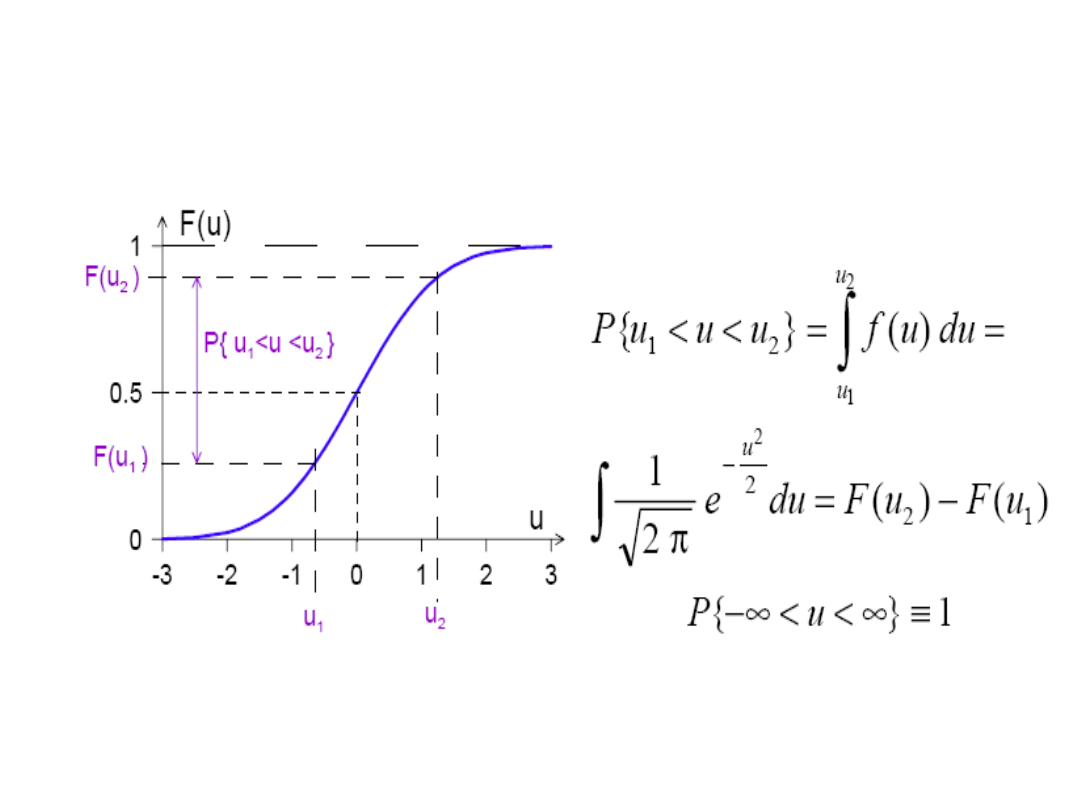
DYSTRYBUANTA ROZKŁADU
Własności rozkładu normalnego

Empiryczne wartości parametrów
rozkładu normalnego
Obliczone empiryczne wartości parametrów μ,σ
z próby
losowej
:
-
wartość średnia - x
s
- błąd średni – m
.
Błąd średni to empiryczna ocena parametru σ,
Definicja: P(|| < m) = 0.68
Różne charakterystyki do oceny błędów:
błąd
średni
,
błąd
przeciętny,
błąd
prawdopodobny,
błąd graniczny
oraz
błąd względny
.
Różnica między wartością średnią z próby
losowej x
s
i obserwacją l
i
nazywa się
błędem pozornym
v
i
v
i
= x
s
- l
i
Obliczenie błędu średniego z próby losowej
2
m=
n
e
�
Wielokrotny pomiar tej samej wielkości daje
nadliczbowe elementy i pozwala obliczyć błędy
pozorne v oraz błąd średni m. Dotyczy to zarówno
pomiarów bezpośrednich jak też pośrednich.
2
v
m=
n-1
Błąd graniczny
Małe prawdopodobieństwo zdarzenia: P(||
<m)=0.68 nakazuje szukać korzystniejszego
parametru do oceny błędów: P(|| < m
gr
) = 0.997,
m
gr
= 3 m. (0.3% ryzyka
wystąpienia błędów || większych od granicznego)
Błąd graniczny jest przyjmowany do określenia
największej wartości błędu dopuszczalnej dla
obserwacji. W metrologii w budownictwie, do
określania
odchyłki dopuszczalnej
często przyjmuje
się 5% poziom istotności, stąd P(|| < 2 m) = 0.95
Błąd przeciętny t
jest średnią arytmetyczną
bezwzględnych wartości błędów danego szeregu
jednakowo dokładnych obserwacji:
| |
t=
n
Błąd względny
Błąd względny to
stosunek bezwzględnej wartości
błędu do całej mierzonej wielkości
.
W pewnych zadaniach przy ocenie dokładności
korzystniej jest użyć miary względnej. Na przykład
porównanie błędów długości odcinków, pola figur,
objętości obiektów lub ich masy. Odcinka krótkiego
i bardzo długiego ewentualnie pomiar objętości
obiektów lub ich masy. Takie porównania wymagają
względnej miary dokładności
:
1
w =
L
(
)
|m|

Prawo Gaussa przenoszenia się
błędów średnich.
Błędy obserwacji
powodują, że również wszelkie
funkcje
tych
obserwacji
są obarczone błędami. W
przypadku funkcji liniowych ocena błędu funkcji
obserwacji jest nieskomplikowana. Dla
funkcji
nieliniowej
F = f(x, y, z, ...), błąd średni może być
obliczony dla przybliżonej postaci tej funkcji, przy
założeniu, że daje się ona rozwinąć w szereg
Taylora. Funkcja F (x, y, z) w postaci
szeregu Taylora
w otoczeniu punktu P (x
0
, y
0
, z
0
):
F (x,y,z) = F (x
0
+ dx ,y
0
+ dy, z
0
+ dz) = F (x
0
,y
0
,z
0
)
+
0
0
0
F
F
F
...
x
y
z
dx
dy
dz
Utożsamiając zmiany dx, dy, dz z błędami:
x
,
y
,
z
wzór na średni błąd dowolnej funkcji:
...
2
2
2
2
2
2
z
y
x
F
m
z
F
m
y
F
m
x
F
m
p
i
i
p
F
Xi
m
x
x
x
x
F
m
1
2
2
1
)
,
,
,
(
Przykład
: Pole prostokątnej działki o bokach
a,b.
Z pomiaru długości boków figury: a =300m,
m
a
=0,10 m, b = 20m m
b
= 0,01m
Obliczyć pole figury, błąd średni oraz względny pola.
Pole P = F(a,b) = a * b = 6000 m
2
= 60 a.
Średni błąd tej funkcji
:
2
2
2
2
P
b
a
P
P
m
m
m
a
b
a
b
Pochodne cząstkowe:
P = 6000 m
2
± 4 m
2
Błąd względny pola figury:
b
a
P
a
b
P
2
2
2
2
b
2
a
P
m
3.6
0.01)
*
300
(
0.1)
*
(20
)
m
*
a
(
)
m
*
(b
m
P
1600
1
m
6000
m
3.6
2
2

Wyrównanie obserwacji i ocena
dokładności
Obserwacje bezpośrednie:
-
jednakowo dokładne
.
-
niejednakowo dokładne
(o różnej dokładności).
Wzajemny stosunek dokładności wyraża się przez
nadanie wag p
i
dla każdej obserwacji,
Wagi p
i
=1 dla każdej obserwacji jednakowo
dokładnej.
Wagi
to liczby niemianowane, które określają
dokładność
względną poszczególnych
obserwacji.

Wyrównanie i ocena dokładności
obserwacji
bezpośrednich jednakowo dokładnych
Teoria błędów posługuje się błędami pozornymi
przy
obliczaniu
wartości
najbardziej
prawdopodobnej.
W statystyce wyrównanie wyników pomiaru nosi
nazwę estymacji parametrów rozkładu.
Wyrównanie obserwacji metodą najmniejszych
kwadratów jest wykonywane przy założeniu v
2
=
minimum dla obserwacji jednakowo-dokładnych.
Dla obserwacji niejednakowo-dokładnych warunek
ten ma postać:
pv
2
= minimum. Wyrównanie takie nazywane jest
wyrównaniem ścisłym.
W zadaniach geodezyjnych często występują
obserwacje pośrednie, których wartości oblicza się
na podstawie innych pomierzonych wielkości.
Próba
złożona z n obserwacji: l
1
, l
2
, ..., l
n
wykonanych z tą samą
dokładnością, Jeżeli
wartość prawdziwa poszukiwanej wielkości
wynosi X, to zgodnie z podaną wcześniej definicją
błędu
prawdziwego można zapisać:
1
= X—l
1
2
= X—l
2
...
n
= X—l
n
Sumując równania, otrzymuje się:
stąd X =
/n dąży do zera,
dąży do wartości prawdziwej
X
Wartość średnia
:
i
nX
l
l
n
n
x
i
l
x
n
Przykład wyrównania obserwacji jednakowo
dokładnych
i
Obs. l
i
v
i
pv
i
1
1.419
-5
25
2
1.408
6
36
3
1.415
-1
1
4
1.410
4
16
5
1.415
-1
1
6
1.418
-4
16
7
1.412
2
4
8
1.415
-1
1
9
1.422
-8
64
10
1.406
8
64
1.414
=
0
228
=
14.140
x
2
v
m
n 1
=
±
5 mm
Błąd średni średniej
arytmetycznej
M:
2
m
5
M
=
= 1.6 mm
n n 1
n
10
v
Średnia
arytmetyczna:
i
l
x
= 1.414
n
1
2
2
n
v
n
m
2
m
M
n n 1
n
v
Średni błąd pojedynczej obserwacji z próby (m):
Błąd średni średniej arytmetycznej (M):
(po wyrównaniu obserwacji)
n
i
l
x
i
i
v = x- l
Ocena dokładności pomiarów
Błąd średniej arytmetycznej M można wyznaczyć
jako
błąd
funkcji:
= F(l):
Przyjmując, że suma obserwacji ma
odchyleni
standardowe σ
x
,
otrzymuje się wzór na tzw. średni
błąd średniej
arytmetycznej
:
x
2
i
2
m
M
n
2
2
2
x
2
M
n
2
2
M
n(n-1)
v
Wyrównanie i ocena dokładności obserwacji
bezpośrednich niejednakowo dokładnych
Próba
losowa
n
obserwacji
niejednakowo
dokładnych: l
1
, l
2
, ..., l
n
średnie błędy
m
1
, m
2
, ..., rn
n
lub
wagi
p
1
, p
2
, ..., p
n
,
lub
2
i
l
p
1/ m
1
2
2
2
2
1
2
1
1
1
p :p :...:p
:
:...:
m m
m
n
n
Ogólna średnia arytmetyczna
(ważona):
1 1
2 2
1
2
pl
p l
p l
... p l
p
p
... p
p
n n
n
X
Błąd średni
typowej obserwacji
o wadze p
0
=1.
2
0
pv
m
n 1
Błąd średni ogólnej średniej arytmetycznej:
2
pv
M
p(n-1)
Przykład wyrównania obserwacji
różnodokładnych
i
Obs. l
i
p
i
v
i
pv
i
pvv
i
1
1.419
0.3
-4.85
-1.455 7.05
6
2
1.408
0.5
6.15
3.075
18.9
11
3
1.415
1.2
-0.85
1.020
0.86
7
4
1.410
0.6
4.15
2.490
10.3
34
5
1.415
1.5
-0.85
-1.275 1.08
4
6
1.418
0.2
-3.85
-0.770 2.96
4
7
1.412
0.4
2.15
0.860
1.84
9
8
1.415
1.5
-0.85
-1.275 1.08
4
9
1.422
0.5
-7.85
3.925
30.8
11
10
1.406
0.4
8.15
3.260
26.5
69
1.414
pl
10.0
4
7.1
0.030
98.5
65
pl
=
10.040
x
Średni błąd obserwacji typowej:
2
0
pv
m
n 1
2
pv
M
p(n-1)
x
= 1.4141.2 mm
=
3.3
mm
=
1.2
mm
Średni błąd wartości oczekiwanej:
Dla bardzo małych prób wyniki pomiarów podlegają
rozkładowi
tStudenta
. Przyjmując interpretacje
probabilistyczną odchylenia standardowego w rozkładzie
normalnym (prawdopodobieństwo uzyskania wyniku
spoza przedziału
<x
s
- m
x
;x
s
+ m
x
> wynosi 0,3174),
znajdujemy taką
wartość krytyczną
w rozkładzie
Studenta t
n,
, dla której =0.31740.32. Wtedy dla
bardzo małej próby
S
xt
= t
n, 0.32
m
x
m
x
S
xt
t
n, 0.32
– wartość krytyczna z rozkładu tStudenta
Wartości krytyczne t
n,0.32
dla niektórych wartości n
podane są w tabeli
n
Wart. Krytyczna
t(n,0.32)
3
1.3210
4
1.1966
6
1.1103
8
1.0765
10
1.0585
15
1.0368
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
Wyszukiwarka
Podobne podstrony:
teoria bledow 2
2 Teoria Bledow Pomiarow
teoria bledow
teoria bledow ppt
Teoria błędów
Kompendium teoria bledow
Teoria błędów, !!!Uczelnia, fizyka, kolos
3 Podstawy Metrologii teoria błędów
TEORIA BŁĘDÓW
Wykład 2-Teoria błędów
dod teoria błędów
miernictwo1 teoria bledow id 77 Nieznany
teoria bledow 2
2 Teoria Bledow Pomiarow
teoria bledow
Teoria błędów w analizie numerycznej
DIAGNOZA BŁĘDÓW WYCHOWAWCZYCH, Pedagogika I, Teoria wychowania
więcej podobnych podstron