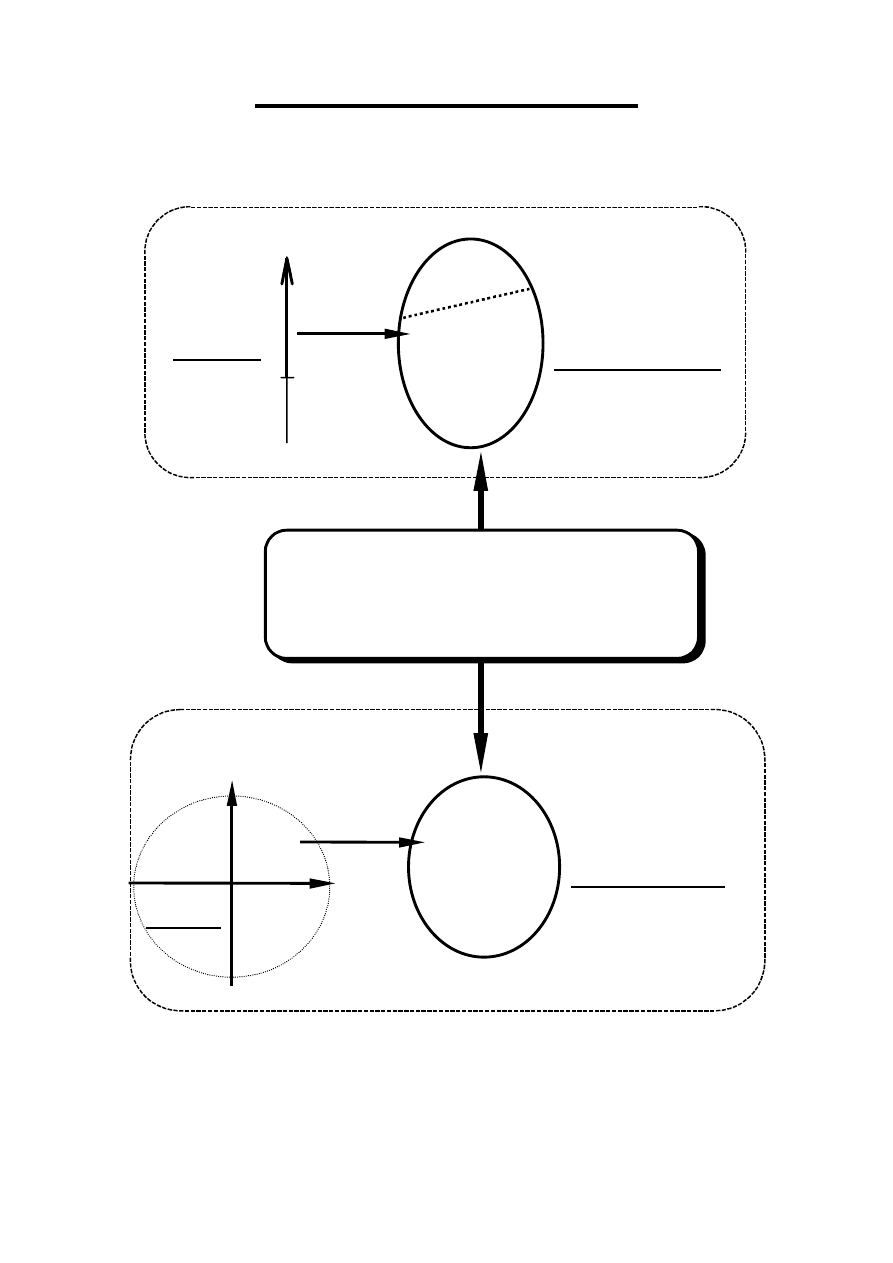
Przekształcenie Laplace’a
Zbiór funkcji
zmiennej zespolonej
Zbiór funkcji
zmiennej rzeczywistej
Dziedzina
rzeczywista
Np. czas
„t”
0
Pozostałe
f(t)
f( t
≥ 0 )
f(
•)
+ 1
+ j
Dziedzina
zespolona
Np. zmienna
s =
α
+j
ω
F(
•)
F(s)
)]
(
[
)
(
1
)
(
)
(
)
(
)
(
1
0
s
F
L
t
t
f
s
F
t
f
dt
st
e
t
f
−
=
⋅
∫
=
=
−
∞
⎥⎦
⎤
⎢⎣
⎡
L
Dr inż. Jacek Czosnowski
Katedra Elektrotechniki AGH Wydział EAIiE
Twierdzenia
• O Liniowości
Jeśli L[f
1
(t)]= F
1
(s) oraz L[f
2
(t)]= F
2
(s) , to dla
dowolnych liczb k
1
, k
2
:
L[k
1
f
1
(t) + k
2
f
2
(t)] = k
1
F
1
(s) + k
2
F
2
(s)
• O Zmianie Skali ( o podobieństwie )
Jeśli L[f(t)]= F(s) oraz a
∈R
+
, to :
L[f(at)] = a
–1
F(a
–1
s)
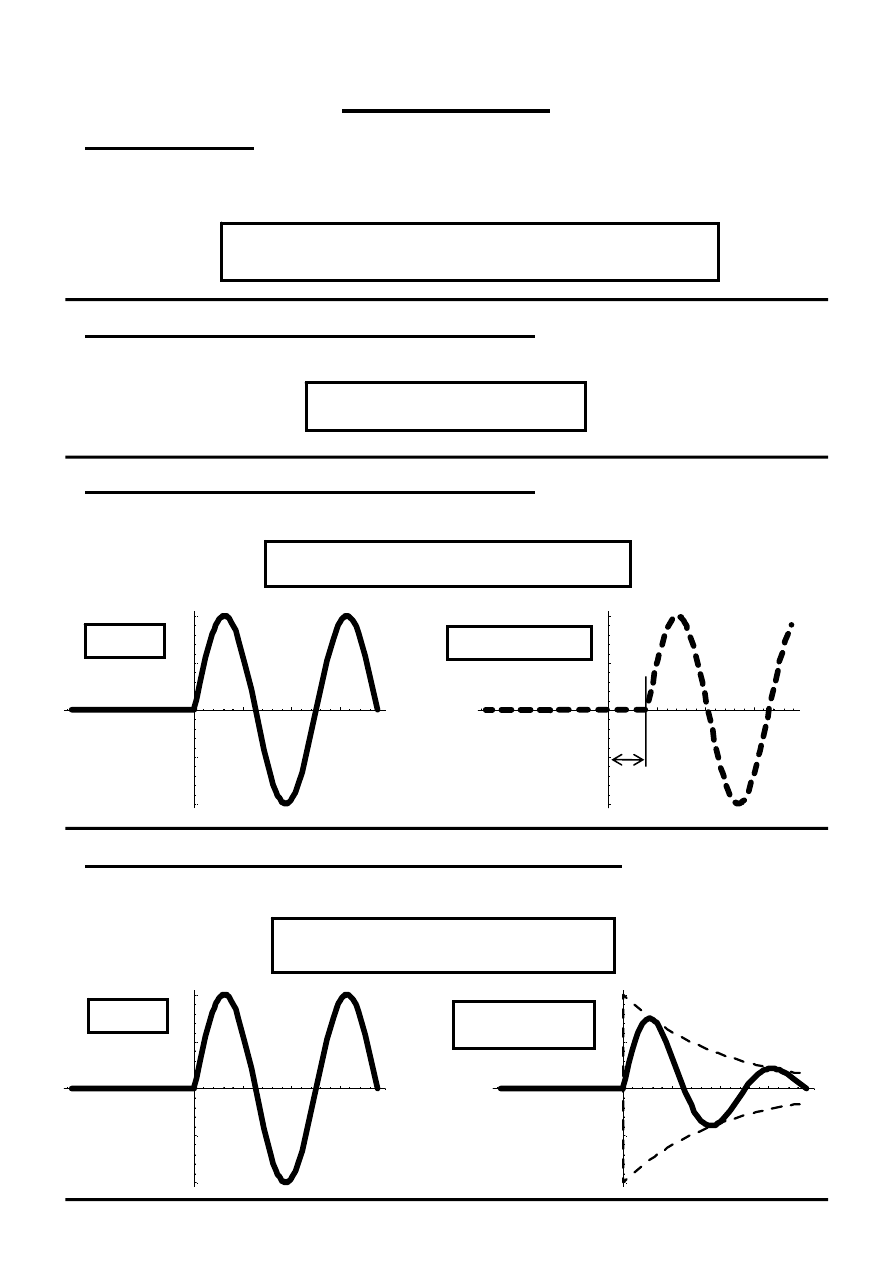
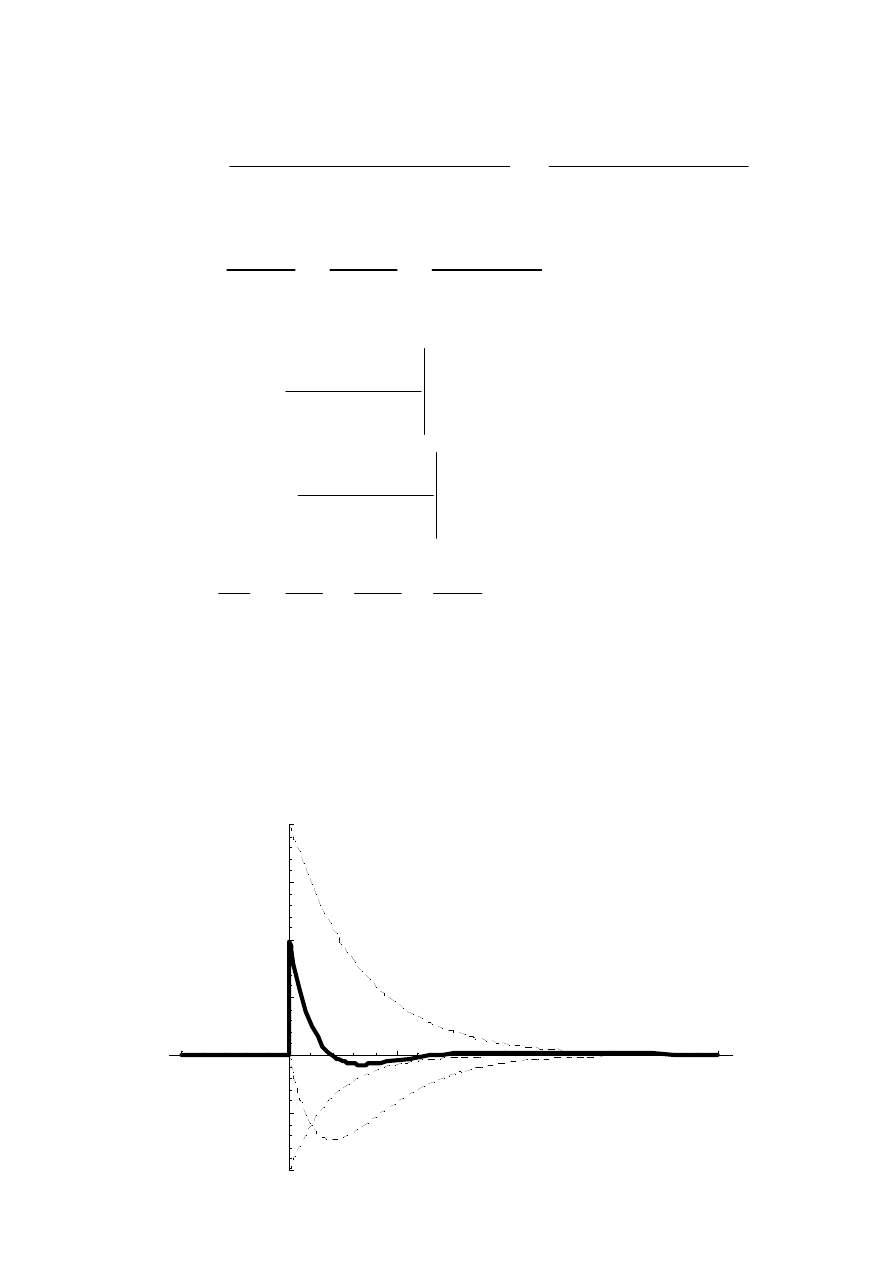
• O Przesunięciu w Dziedzinie Czasu
Jeśli L[f (t)]= F (s) , to dla
τ
≥ 0 :
L[f(t –
τ
) 1(t –
τ
)] = e
–s
τ
F(s)
-5
-2.5
2.5
5
7.5
-1
-0.5
0.5
1
-5
-2.5
2.5
5
7.5
-1
-0.5
0.5
1
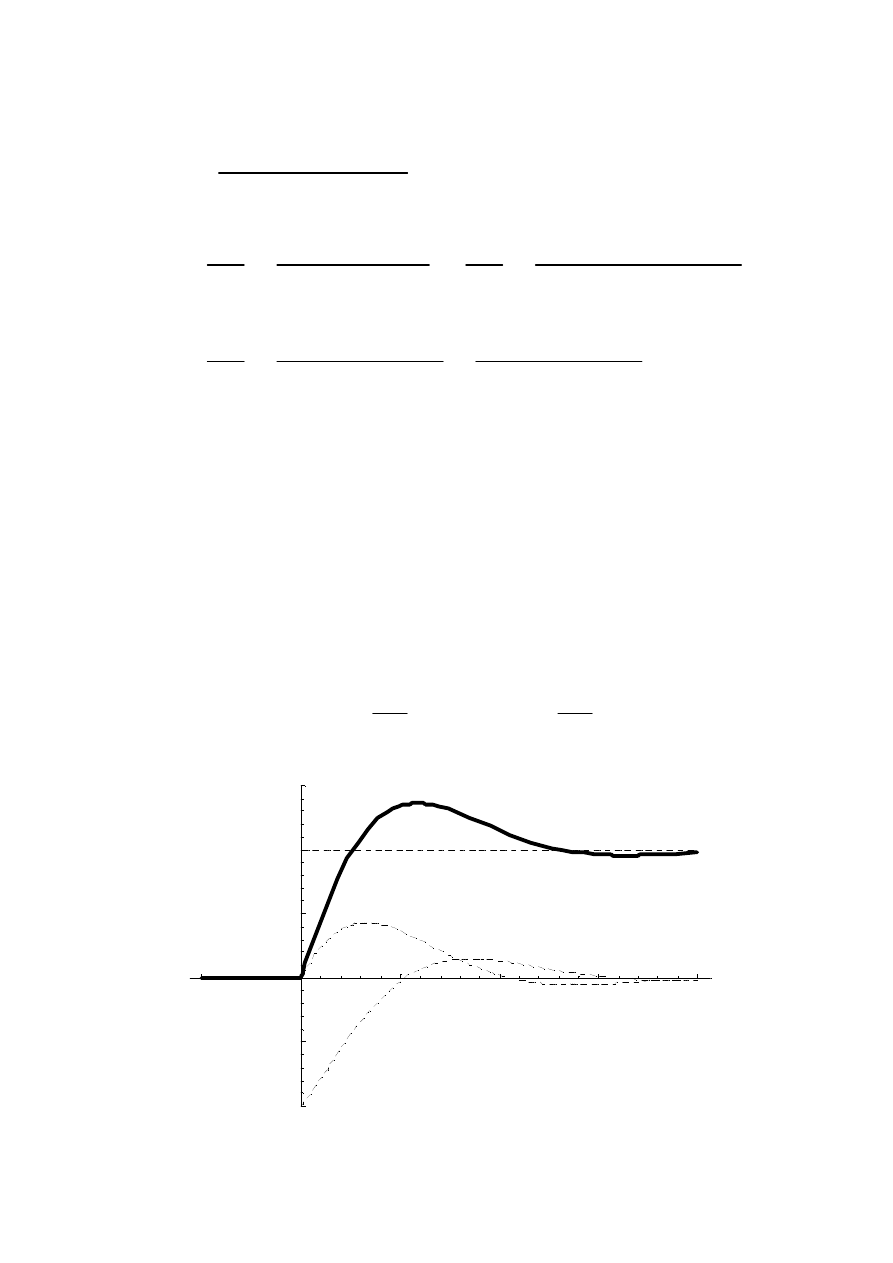
• O Przesunięciu w Dziedzinie Transformat
Jeśli L[f (t) 1(t)]= F (s) , to dla
α
∈Z:
L[e
–
αt
f(t) 1(t)] = F( s +
α )
-5
-2.5
2.5
5
7.5
-1
-0.5
0.5
1
-5
-2.5
2.5
5
7.5
-1
-0.5
0.5
1
f(t)1(t)
e
–
αt
f(t) 1(t)
f(t)1(t)
f(t–
τ
)1(t–
τ
)
τ
Dr inż. Jacek Czosnowski
Katedra Elektrotechniki AGH Wydział EAIiE
• O Transformacie Pochodnej
Jeśli f(t) i f
(1)
(t) są L - transformowalne , to:
L[f
(1)
(t)]= s F(s) – f(0
+
)
i ogólnie:
L f
t
snF s
s
f
n
n k
k
n
k
[
( )]
( )
(
( )
( )
=
− ∑
+
− −
)
=
−
1
0
1
0
• O Transformacie Całki
Jeśli L[f (t)]= F (s) , to:
)
(
1
)
(
0
s
F
s
d
f
L
t
=
∫
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
τ
τ
• O Różniczkowaniu Transformaty
Jeśli L[f (t)]= F (s) , to:
L t f t
d F s
d s
[
( )]
( )
= −
i ogólnie:
L t
f t
d n F s
d ns
n
n
[
( )] (
)
( )
= −
⋅
1
• O Granicy Transformaty w Nieskończoności
Jeśli L[f (t)]= F (s) , to:
lim ( )
s
F s
→∞
=0
• O Wartościach Granicznych
Jeśli L[f (t)]= F (s) oraz
a) istnieje granica
t
lim
( )
( )
f t
f
→+∞
= ∞
, to:
lim
( )
( )
s
sF s
f
→
= ∞
0
b) istnieje granica
t
lim
( )
(
)
f t
f
→ +
=
+
0
0
, to:
lim
( )
(
)
s
sF s
f
→∞
=
+
0
Dr inż. Jacek Czosnowski
Katedra Elektrotechniki AGH Wydział EAIiE
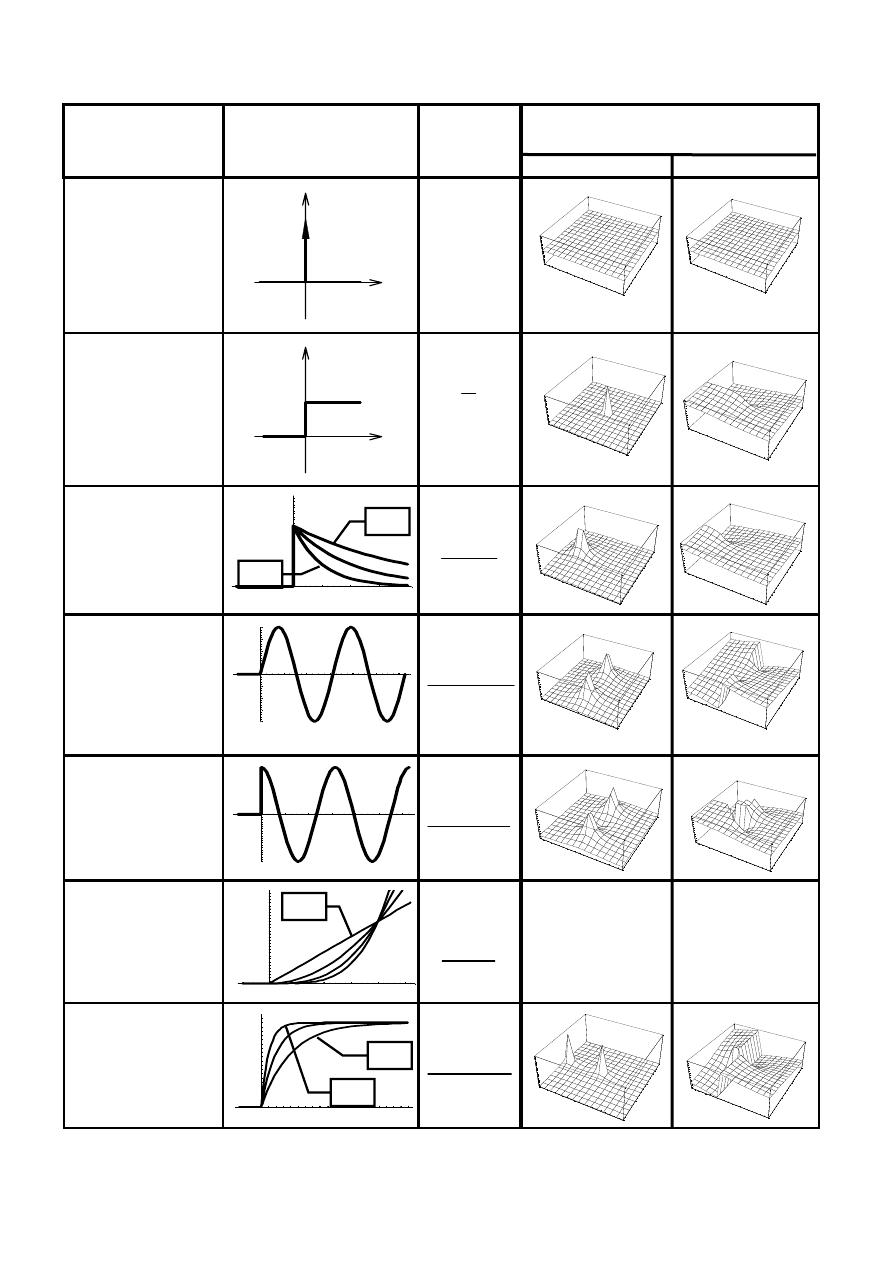
Tabela podstawowych transformat Laplace’a
f(t) –
oryginał
Wykres f(t)
F(s) -
transf.
Wykres F(s)
Moduł Argument
δ(t)
δ
(t)
f(t)
t
1
-1
-0.5
0
0.5
1
-1
-0.5
0
0.5
1
0
0.5
1
1.5
2
-1
-0.5
0
0.5
1
-0.1
-0.05
0
0.05
0.1
-0.1
-0.05
0
0.05
0.1
-1
-0.5
0
0.5
1
-0.1
-0.05
0
0.05
0.1
1(t)
1
f(t)
t
1
s
-0.1
-0.05
0
0.05
0.1
-0.1
-0.05
0
0.05
0.1
0
1
´ 10
1 6
2
´ 10
1 6
3
´ 10
1 6
4
´ 10
1 6
-0.1
-0.05
0
0.05
0.1
-0.1
-0.05
0
0.05
0.1
-0.1
-0.05
0
0.05
0.1
-2
0
2
-0.1
-0.05
0
0.05
0.1
e
at
−
1(t)
-1
-0.5
0.5
1
1.5
2
0.2
0.4
0.6
0.8
1
1.2
1.4
1
s
a
+
-0.1
-0.05
0
0.05
0.1
-0.1
-0.05
0
0.05
0.1
50
100
-0.1
-0.05
0
0.05
0.1
-0.1
-0.05
0
0.05
0.1
-0.1
-0.05
0
0.05
0.1
-2
0
2
-0.1
-0.05
0
0.05
0.1
sin
ωt 1(t)
-2
2
4
6
8
10
12
-1
-0.75
-0.5
-0.25
0.25
0.5
0.75
1
ω
ω
s
2
2
+
-0.1
-0.05
0
0.05
0.1
-0.1
-0.05
0
0.05
0.1
20
40
60
-0.1
-0.05
0
0.05
0.1
-0.1
-0.05
0
0.05
0.1
-0.1
-0.05
0
0.05
0.1
-2
0
2
-0.1
-0.05
0
0.05
0.1
cos
ωt 1(t)
-2
2
4
6
8
10
12
-1
-0.75
-0.5
-0.25
0.25
0.5
0.75
1
s
s
2
2
+ ω
-0.1
-0.05
0
0.05
0.1
-0.1
-0.05
0
0.05
0.1
0
20
40
60
-0.1
-0.05
0
0.05
0.1
-0.1
-0.05
0
0.05
0.1
-0.1
-0.05
0
0.05
0.1
-2
0
2
-0.1
-0.05
0
0.05
0.1
t
n
1(t)
-0.25
0.25
0.5
0.75
1
1.25
0.2
0.4
0.6
0.8
1
1.2
1.4
n
s
n
!
+1
patrz wyżej patrz wyżej
(1– e
–at
) 1(t)
2
4
6
8
10
0.2
0.4
0.6
0.8
1
(
)
a
s s
a
+
-1
-0.5
0
0.5
1
-1
-0.5
0
0.5
1
0
10
20
30
40
50
-1
-0.5
0
0.5
1
-0.1
-0.05
0
0.05
0.1
-0.1
-0.05
0
0.05
0.1
-2
0
2
-0.1
-0.05
0
0.05
0.1
a<1
a>1
n=1
a<1
a>1
Dr inż. Jacek Czosnowski
Katedra Elektrotechniki AGH Wydział EAIiE
Dr inż. Jacek Czosnowski
Katedra Elektrotechniki AGH Wydział EAIiE
NP.
1.
δ τ τ
( )
( )
d
t
t
=
−∞
∫
1
z tw. OTC
L
t
L
d
s
t
[ ( )]
[
( )
]
1
1
=
=
−∞
∫
δ τ τ
2.
L
t
s
[ ( )]
1
1
=
z tw. OPwDT
L e
t
s a
at
[
( )]
−
=
+
1
1
3.
sin
( )
( )
( )
( )
ω
ω
ω
ω
ω
t
t
e
e
j
t
e
j
t
e
j
t
j t
j t
j t
j t
⋅
=
−
⋅
=
⋅
−
⋅
−
−
1
2
1
2
1
2
1
L
t
s
[ ( )]
1
1
=
z tw. OPwDT
L
t
t
j
L e
t
L e
t
j s
j
s
j
j
s
j
s
j
s
j
s
j
s
j t
j t
[sin
( )]
[
( )]
[
( )]
[
]
(
)
(
)
(
)(
)
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
⋅
=
⋅
−
⋅
=
=
−
−
+
=
+
− −
−
+
=
=
+
−
1
1
2
1
1
1
2
1
1
1
2
2
2
4.
L
t
s
[sin
]
ω
ω
ω
=
+
2
2
z tw. OTP
L
t
L
d
dt
t
s
s
s
s
[cos
]
[
sin
]
sin(
)
ω
ω
ω
ω
ω
ω
ω
=
=
+
−
=
=
+
+
1
1
0
2
2
2
2
ROZKŁAD WŁAŚCIWEJ FUNKCJI WYMIERNEJ
NA UŁAMKI PROSTE
F s
L s
M s
a s
b s
s
a b
a
b
l
m
k
k
k
l
k
k
k
m
k
k
l
m
( )
( )
( )
;
,
,
;
,
;
=
=
∈
∈ℜ
≠
=
−
=
=
∑
∑
0
0
0
1
Ζ
< 0
(1)
Przypadek 1
Pierwiastki wielomianu M(s) są pojedyncze (różne)
M s
s
s
p s
q
s
s
k
k
m
i
i
i
m
k
k
m
i
i
i
m
( )
(
)
(
)
(
)
((
)
=
+
⋅
+
+
=
+
⋅
+
+
=
=
=
=
∏
∏
∏
∏
α
α
β
1
2
1
1
2
2
1
1
2
1
2
)
=
ω
(2)
przy czym:
m
m
m
p
p
q
i
i
i
i
i
i
i
1
2
2
0
2
4
+
=
<
=
−
=
−
,
,
,
,
∆
∆
∆
=
2
β
ω
i
.
Wielomian M(s) ma: m
1
- pierwiastków rzeczywistych: {
α
1
,
α
2
, ...,
α
m1
};
m
2
- pierwiastków zespolonych: {-
β
1
±jω
1
, -
β
2
±jω
2
, ..., -
β
m2
±jω
m2
};
Dr inż. Jacek Czosnowski
Katedra Elektrotechniki AGH Wydział EAIiE
F s
A
s
B s
C
s
p s
q
A
s
B s
D
s
k
k
k
m
i
i
i
i
i
m
k
k
k
m
i
i
i
i
i
i
m
( )
(
)
(
)
=
+
+
+
+
+
=
=
+
+
+
+
+
+
=
=
=
=
∑
∑
∑
∑
α
α
β
β
ω
1
2
1
1
2
2
1
1
2
1
2
i
ω
(3)
przy czym:
D
C
B
i
i
i
i
=
−
i
β
ω
Pary transformat:
A
s
A e
k
k
k
t
k
+
← →
⎯
∧
−
α
α
B s
C
s
p s
q
B s
D
s
e
B
t
D
t
i
i
i
i
i
i
i
i
i
i
t
i
i
i
i
+
+
+
=
+
+
+
+
← →
⎯
+
∧
−β
2
2
2
(
)
(
)
(
cos
sin
β
i
)
ω
β
ω
ω
ω
Oryginał:
( )
f t
A e
e
B
t
D
t
k
t
k
m
t
i
i
i
m
i
i
i
i
=
+
+
−
=
−
=
∑
∑
α
β
ω
ω
1
1
1
2
(
cos
sin
)
(4)
Przypadek 2
Wielomian M(s) ma pierwiastki wielokrotne.
r - krotny pierwiastek rzeczywisty: s
k
= -
α
k
( s +
α
k
)
r
=>
)
(
!
)
(
)
(
1
1
1
t
f
e
t
i
A
s
A
s
F
r
t
i
r
i
ki
r
i
i
k
ki
r
k
=
⎯→
←
+
=
−
−
=
∧
=
∑
∑
α
α
Dr inż. Jacek Czosnowski
Katedra Elektrotechniki AGH Wydział EAIiE
r - krotny pierwiastek zespolony: s
k
= -
β
k
± j
ω
k
(s
2
+ p
k
s + q
k
)
r
= [(s +
β
k
)
2
+
ω
k
2
]
r
=>
(
)
[
]
(
)
)
(
sin
cos
)
(
)
(
)
(
1
1
1
2
2
1
2
t
f
t
F
t
E
e
t
s
D
s
B
q
s
p
s
C
s
B
s
F
r
r
i
k
ki
k
ki
t
i
r
i
i
k
k
k
ki
k
ki
r
i
i
k
k
ki
ki
r
k
=
+
⎯→
←
+
+
+
+
=
+
+
+
=
∑
∑
∑
=
−
−
∧
=
=
ω
ω
ω
β
ω
β
β
Przykłady
1).
F s
s
s
s
s
s
A
s
A
s
A
s
( )
=
+
+
+
+
=
+
+
+
+
2
3
2
1
2
29
30
7
10
2
5
3
=>
α
1
= 0,
α
2
= –2,
α
3
= –5
A
k
= F(s)(s-
α
k
)|
s=
α
k
=> A
1
= +3,
A
2
= +4,
A
3
= –6
f(t) = (3 + 4e
-2t
-6e
-5t
) 1(t)
-1
1
2
3
4
-6
-4
-2
2
4
6
Dr inż. Jacek Czosnowski
Katedra Elektrotechniki AGH Wydział EAIiE
2).
F s
s
s
s
s
s
s
s
s
s
A
s
A
s
A
s
( )
(
)(
)
(
)
=
+
+
+
+
+
=
+
+
+
+
=
=
+
+
+
+
+
2
3
2
2
2
1
21
22
2
2
5
13
55
75
2
5
3
5
3
5
5
A
s
s
s
A
s
s
s
A
A
A
A
S
S
1
2
2
3
22
2
5
1
21
22
21
2
5
5
5
2
5
3
10
1
15
3
5
25
1
=
+
+
+
=
=
+
+
+
= −
=
+
+
=>
= −
=−
=−
(
)
;
;
f(t)= [2e
-3t
- (1+10t)e
-5t
] 1(t)
-0.5
0.5
1
1.5
2
-1
-0.5
0.5
1
1.5
2
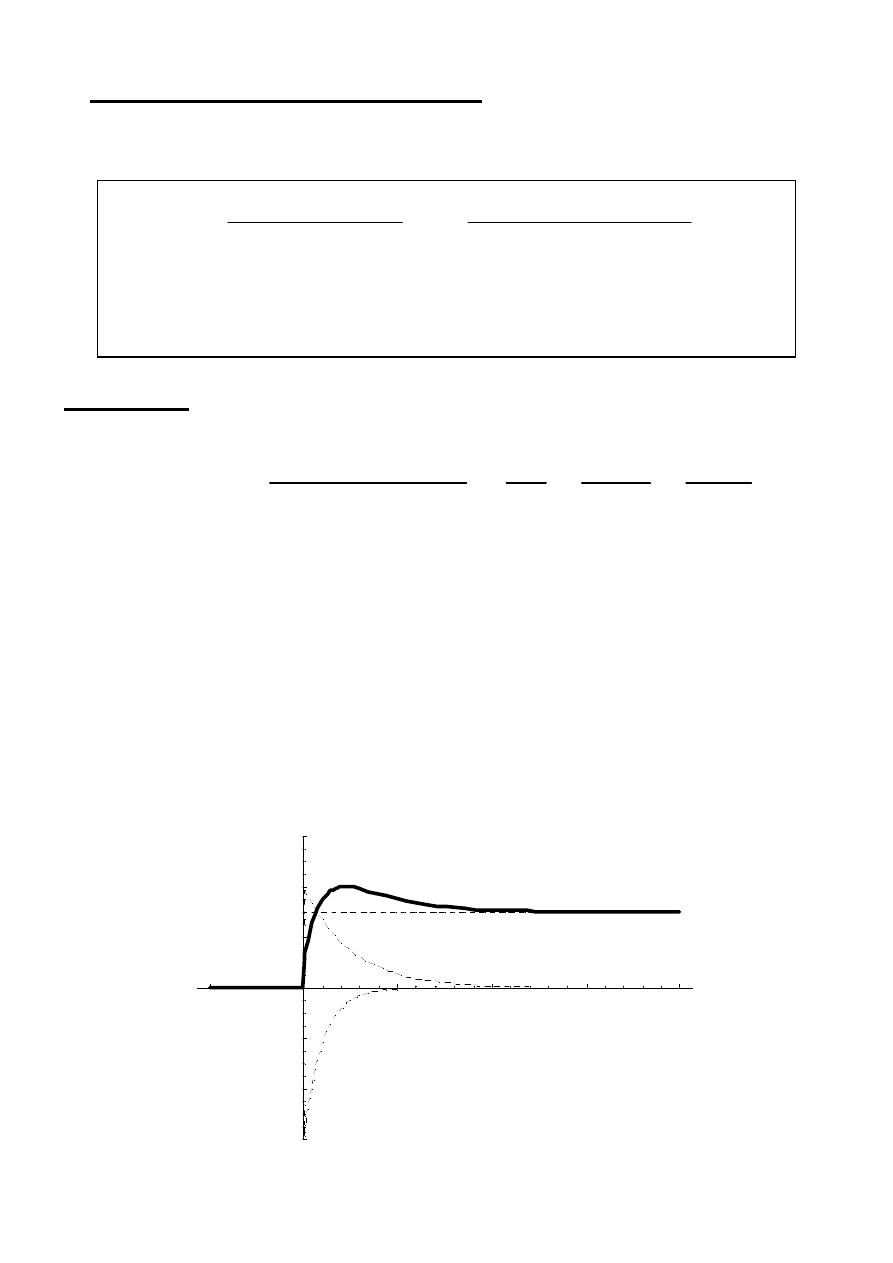
Dr inż. Jacek Czosnowski
Katedra Elektrotechniki AGH Wydział EAIiE
3).
F s
s
s s
s
A
s
B s
C
s
s
A
s
B s
D
s
A
s
A
s
j
A
s
j
( )
(
)
(
)
(
)
(
)
(
)
*
=
+
+
+
=
+
+
+
+
=
+
+
+
+
+
=
+
− − +
+
− − −
5
13
4
13
4
13
2
3
2
3
2
3
2
3
2
1
2
2
2
1
2
2
2
2
1
2
2
=
=
A
1
= + 1;
A
2
= – (1+j)/2;
( B
2
= – 1, C
2
= 1 => D
2
= 1 ; )
f(t) = 1 – e
–2t
(cos
3t – sin
3t ) =
= 1 –
1
2
+ j
e
(–2+3j)t
–
1
2
− j
e
(–2–3j)t
-0.5
0.5
1
1.5
2
-1
-0.5
0.5
1
1.5
Dr inż. Jacek Czosnowski
Katedra Elektrotechniki AGH Wydział EAIiE
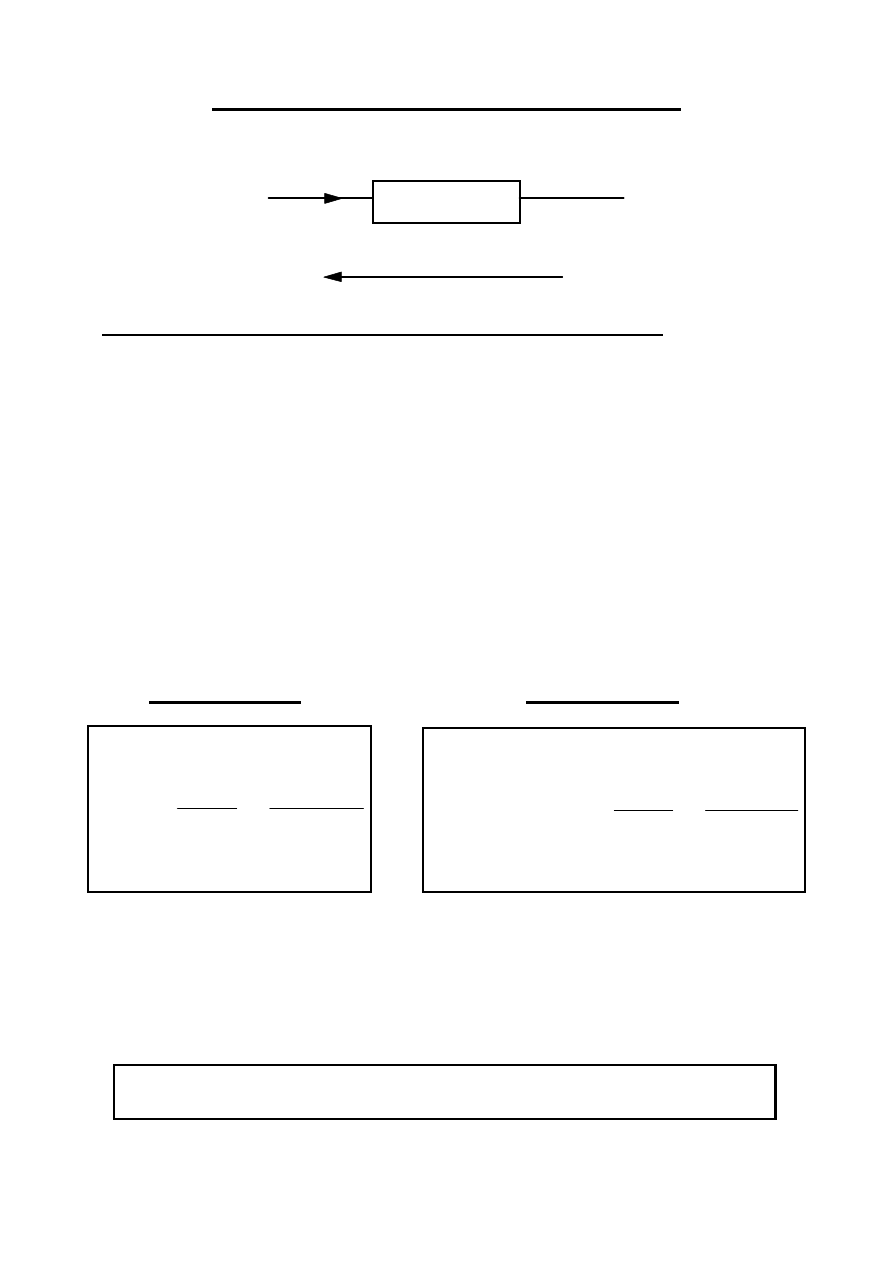
IMMITANCJE DWÓJNIKA
U(s)
I(s)
Z(s) lub Y(s)
1). Zerowe warunki początkowe ( dwójnik SLSB)
Równanie różniczkowe wiążące funkcje obwodowe dwójnika ma postać:
b u
t
a i
t
k
k
k
m
k
k
k
l
( )
( )
( )
( )
=
=
=
∑
∑
0
0
(1)
Po dokonaniu przekształcenia Laplace’a równania (1) dostajemy:
b s U s
a s I s
k
k
k
m
k
k
k
l
( )
( )
=
=
=
∑
∑
0
0
(2)
a stąd:
IMPEDANCJA ADMITANCJA
Z s
U s
I s
a s
b s
k
k
k
l
k
k
k
m
( )
( )
( )
=
=
=
=
∑
∑
0
0
Y s
Z
s
I s
U s
b s
a s
k
k
k
m
k
k
k
l
( )
( )
( )
( )
=
=
=
−
=
=
∑
∑
1
0
0
⇒ Impedancja i admitancja dwójnika SLSB są funkcjami
wymiernymi rzeczywistymi zmiennej zespolonej „s”
Równania operatorowe opisujące dwójnik SLSB mają postać:
U s
Z s I s
I s
Y s U s
( )
( ) ( )
( )
( ) ( )
=
=
;
(4)
Dr inż. Jacek Czosnowski
Katedra Elektrotechniki AGH Wydział EAIiE
2). Niezerowe warunki początkowe ( dwójnik SLS)
Dr inż. Jacek Czosnowski
Katedra Elektrotechniki AGH Wydział EAIiE
Po dokonaniu przekształcenia Laplace’a równania różniczkowych
dwójnika dostajemy równanie:
b s U s
w s
a s I s
w s
k
k
k
m
k
k
k
l
( )
( )
( )
( )
+
=
+
=
=
∑
∑
1
0
2
0
(5)
gdzie w
1
(s), w
2
(s) - składniki zależne od warunków początkowych.
Po przekształceniach otrzymujemy równania operatorowe opisujące
dwójnik SLS:
U s
Z s I s
W s
I s
Y s U s
W s
u
i
( )
( ) ( )
( )
( )
( ) ( )
( )
=
+
=
+
(6)
ŹRÓDŁA W OPISIE OPERATOROWYM
Z(s)
E(s)
I(s)
U(s)
Z(s), Y(s) - dwójniki SLSB
Równoważność:
Z s
Y s
( )
( )
=
1
E(s)= Z(s)J(s)
J(s)= Y(s)E(s)
Y(s)
J(s)
I(s)
U(s)
I(s)= J(s) – Y(s)U(s)
U(s)= E(s) – Z(s)I(s)

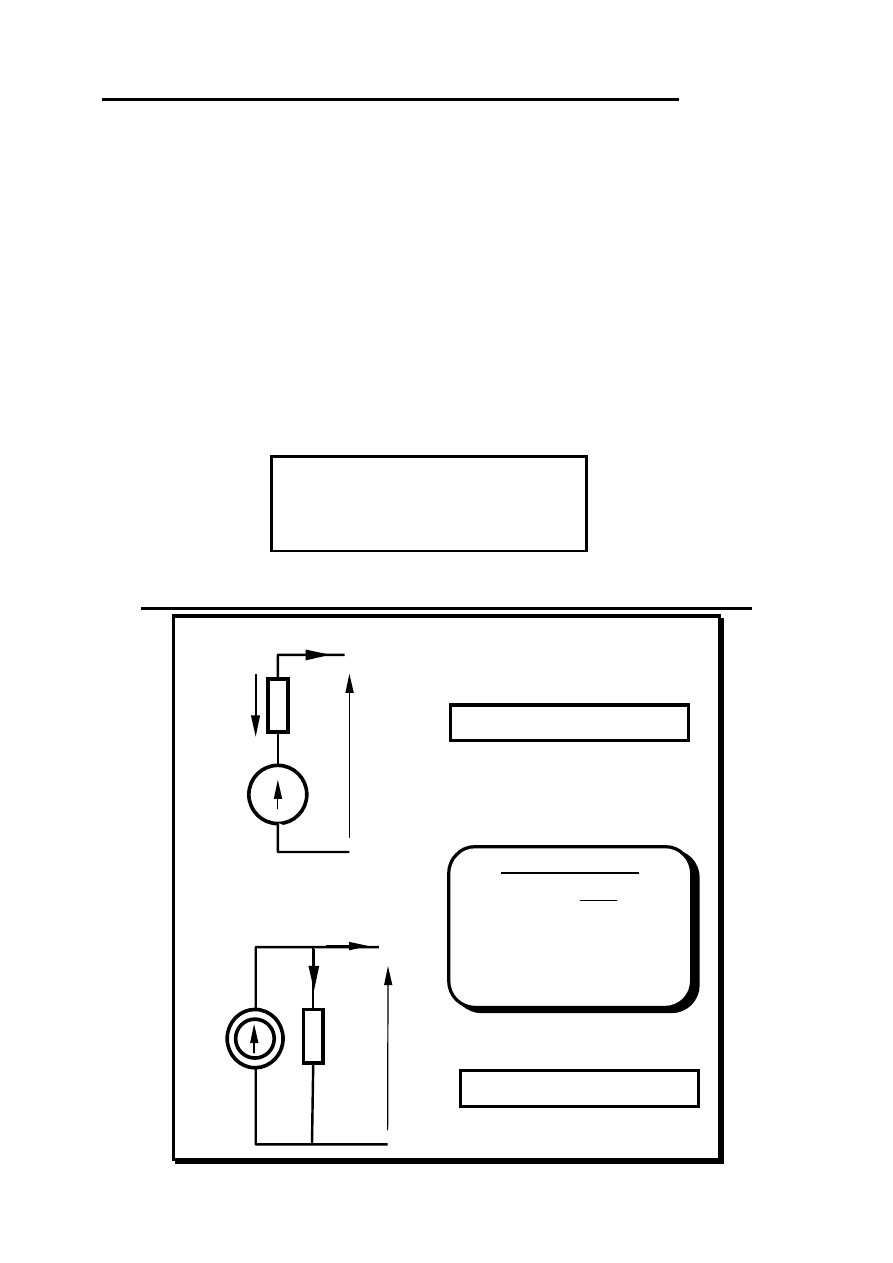
OPIS OPERATOROWY ELEMENTÓW OBWODU
i(t)
u(t)
R
I(s)
U(s)
R
L[
•]
L
– 1
[
•]
u(t)= R i(t) U(s)= R I(s)
I(s)
U(s)
u
s
( )
0
i(t)
u(t)
C
u(0)
1
Cs
L[
•]
L
– 1
[
•]
)
0
(
dτ
)
τ
(
1
)
(
0
u
i
C
t
u
t
+
=
∫
U s
Cs
I s
u
s
( )
( )
( )
=
+
1
0
i(t)
u(t)
L
i(0)
I(s)
U(s)
Ls
i
s
( )
0
L[
•]
L
– 1
[
•]
)
0
(
dτ
)
τ
(
1
)
(
0
i
u
L
t
i
t
+
=
∫
I s
Ls
U s
i
s
( )
( )
( )
=
+
1
0
Dr inż. Jacek Czosnowski
Katedra Elektrotechniki AGH Wydział EAIiE
Dr inż. Jacek Czosnowski
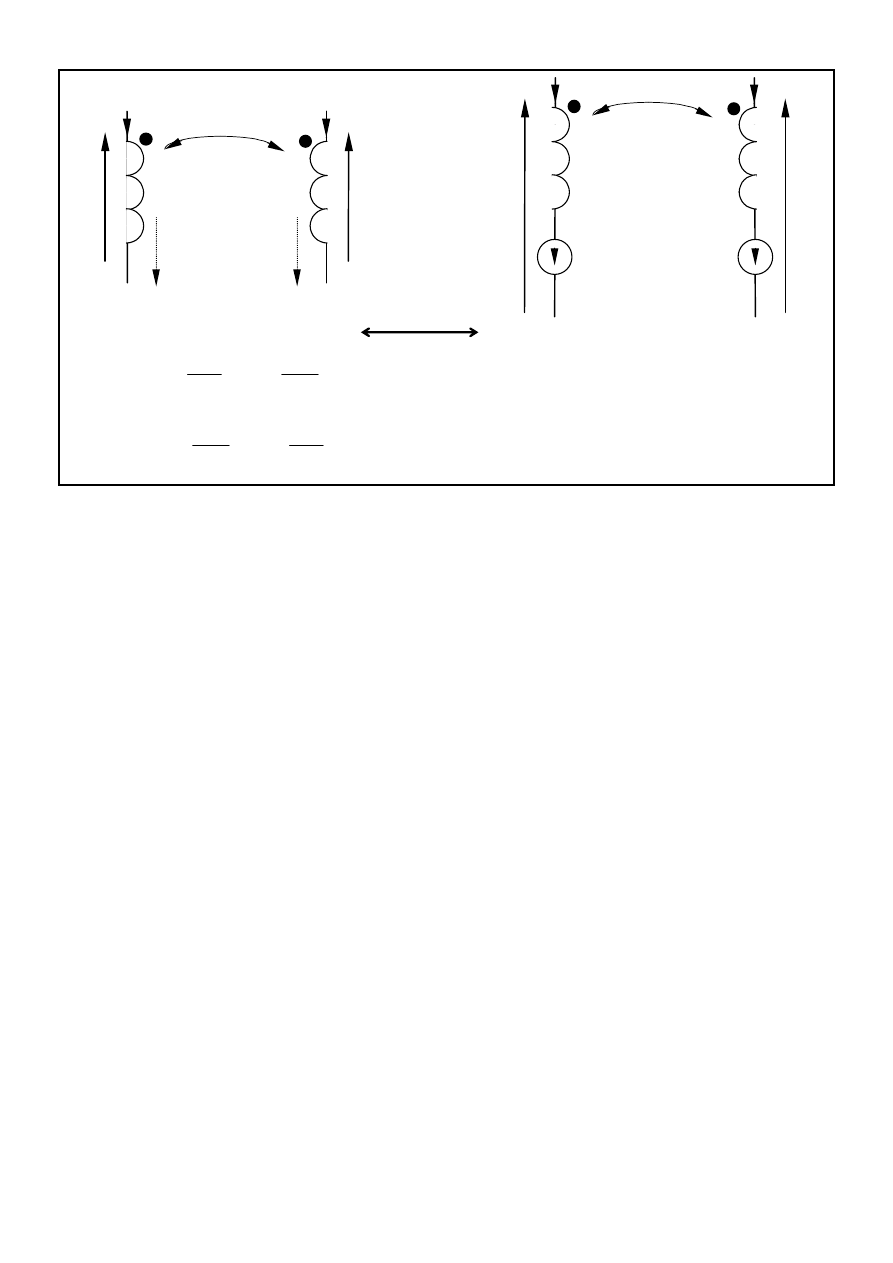
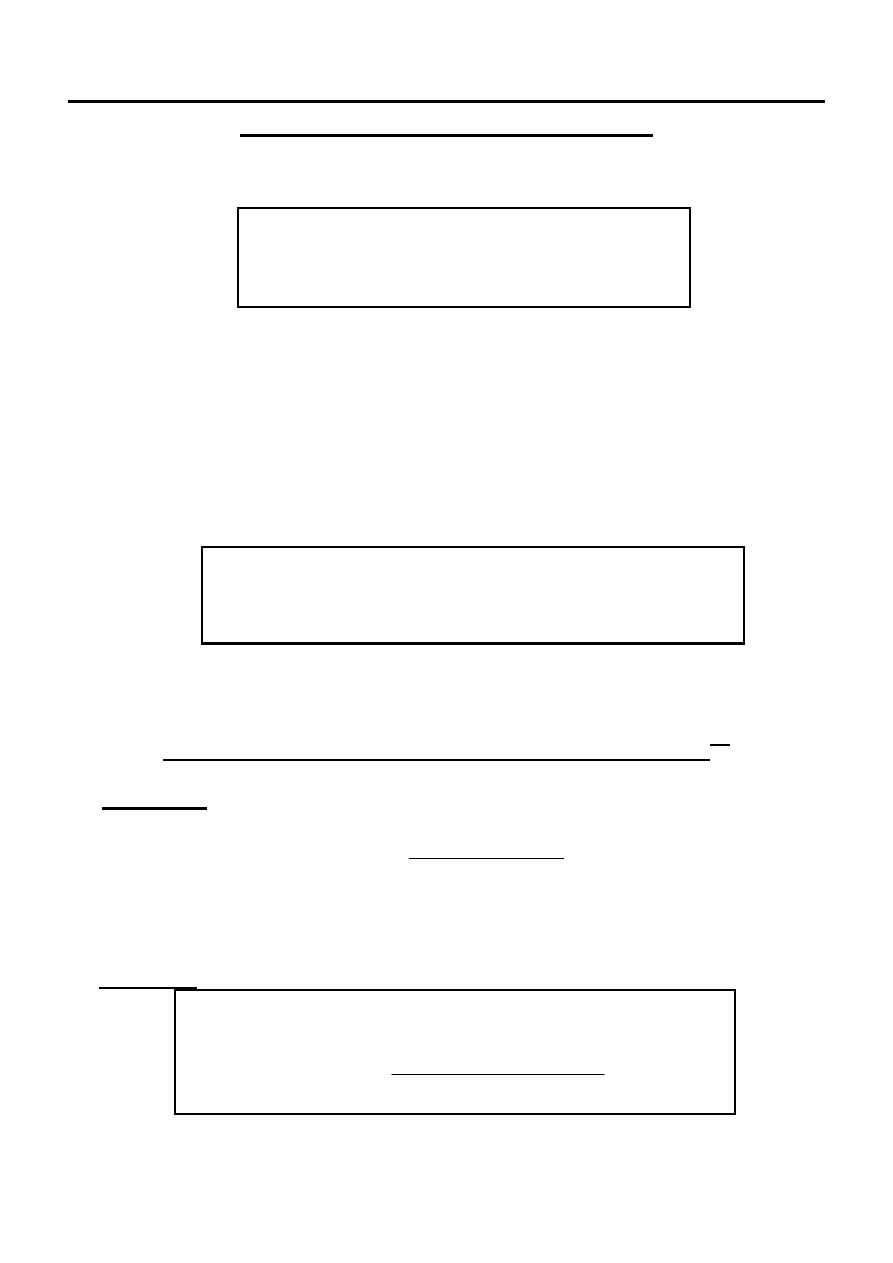
Katedra Elektrotechniki AGH Wydział EAIiE
L
1
i
1
(0)+M
i
2
(0)
L
2
i
2
(0)+M
i
1
(0)
I
1
(s)
U
1
(s)
L
1
s
I
2
(s)
U
2
(s)
L
2
s
Ms
i
1
(t)
u
1
(t)
L
1
i
1
(0)
i
2
(t)
u
2
(t)
L
2
i
2
(0)
M
u t
L
di
dt
M
di
dt
u t
L
di
dt
M
di
dt
1
1
1
2
2
2
2
( )
( )
=
+
=
+
1
]
)]
U s
L sI s
MsI s
L i
Mi
U
s
L sI s
MsI s
L i
Mi
1
1
1
2
1 1
2
2
2
2
1
2 2
1
0
0
0
0
( )
( )
( )
[
( )
( )
( )
( )
( )
[
( )
(
=
+
−
+
=
+
−
+
L[
•]
L
– 1
[
•]
ROZWIĄZYWANIE RÓWNAŃ STANU W DZIEDZINIE
ZMIENNEJ ZESPOLONEJ „s”
Równania stanu i wyjścia zapisane w dziedzinie naturalnej ( czasu ) dla t
≥ 0:
( )
( )
( )
(
)
( )
( )
( )
( )
x
A x
B u
x
x
y
Cx
D u
•
=
+
=
≡
=
+
t
t
t
t
t
t
t
;
0
0
(1)
Dokonując L-transformacji równań (1) z dziedziny czasu ( naturalnej ) do
dziedziny zespolonej otrzymujemy:
( )
( )
( )
( )
( )
( )
( )
s
s
s
s
s
s
s
X
X
AX
BU
Y
CX
DU
−
=
+
=
+
0
(2)
i po przekształceniu:
( ) (
)
( )
( )
[
]
( )
(
)
[
]
( )
(
)
( )
X
1 A
BU
X
Y
C 1 A
B
D U
C 1 A
X
s
s
s
s
s
s
s
=
−
+
=
−
+
+
−
−
−
−
1
1
1
0
0
(3)
Równania (3) są „prostymi” równaniami algebraicznymi. Jedyną trudnością jest
obliczenie macierzy odwrotnej do nieosobliwej ( det(
•) ≠ 0 ) macierzy (s1-A).
OBLICZENIE MACIERZY: K(s)= (s1-A)
–1
1). Ze wzoru:
( )
(
)
(
)
K
1 A
1 A
s
s
s
=
−
−
adj
det
(4)
gdzie adj(s1-A) - macierz dołączona macierzy (s1-A). Jej wyznaczenie
dla n > 3 jest uciążliwe;
2). Ze wzoru:
( ) (
)
(
)
K
1
A
A
1
A
s
s
s
a
s
a
j
k
k
j
k
j
n
j
n
n
=
−
=
⎛
⎝
⎜
⎞
⎠
⎟
−
=
−
− −
= +
=
−
∑
∑
1
1
1
0
1
1
det
;
(5)
gdzie a
k
- współczynniki równania charakterystycznego det(
λ
1-A) = 0
macierzy A.
Dr inż. Jacek Czosnowski
Katedra Elektrotechniki AGH Wydział EAIiE
Wyszukiwarka
Podobne podstrony:
02 Przeksztalcenie Laplace, MiBM Politechnika Poznanska, IV semestr, automatyka, egzamin, pierdoly,
02 Przeksztalecenie Laplace
02.przekształcenia parametrów, STATYSTYKA
Przekształcenia Laplacea cz1
Przekształcenie Laplace
Przekształcenie Laplace'a
4 Przeksztalcenie Laplacea
Przekszta?nie Laplace 1
Przekształcenie Laplace-tabela
03 przeksztalcenie laplace
Przekształcenie Laplace'a
Przeksztalcenie%20Laplace
4 Przeksztalcenie Laplacea CW
Rozwiazywanie rownan rozniczkowych Przeksztalcenia Laplacea, Nauka i Technika, Automatyka, Teoria st
Przekształcenia Laplace'a, Matematyka
Przekształcenie Laplace
02.przekształcenia parametrów, STATYSTYKA
więcej podobnych podstron