EI
2
1
4
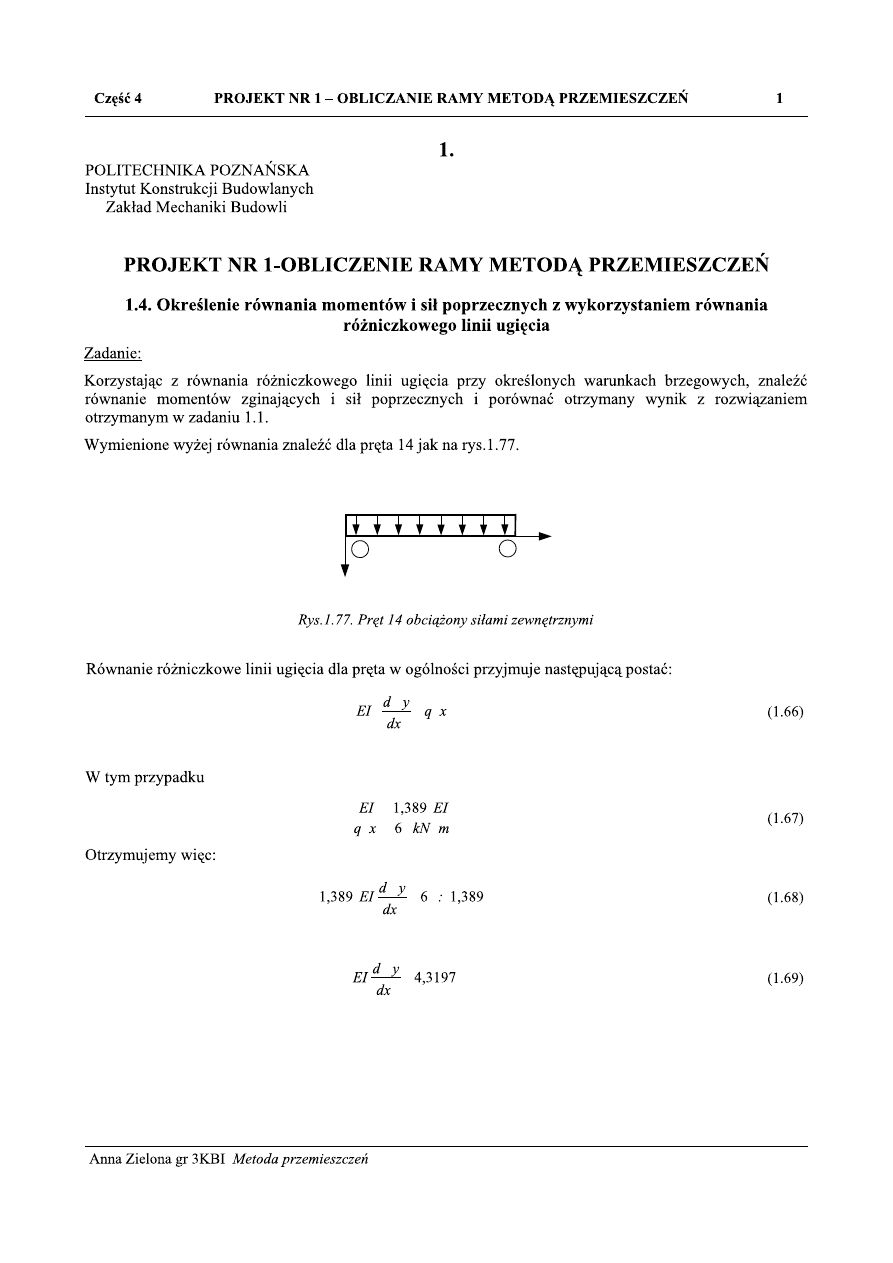
6 kN/m
y
x
2
4
4
=
2
=
= [
/ ]
4
4
= /
4
4
=
AlmaMater
EI
d
3
y
dx
3
=
x A=
−T x
EI
d
2
y
dx
2
=
⋅x
2
!
AxB=
−M x
EI
d y
dx
=
⋅x
3
!
A⋅x
2
!
xBxC =EI
EI y=
⋅x
4
!
A
x
3
!
B
x
2
!
CxD
EI y=
x
4
A
x
3
B
x
2
CxD
B=
−
=
⋅
3
A⋅
2
BC
−
= AC
1
0
4
v
1
v
4
Ψ
01
Ψ
14
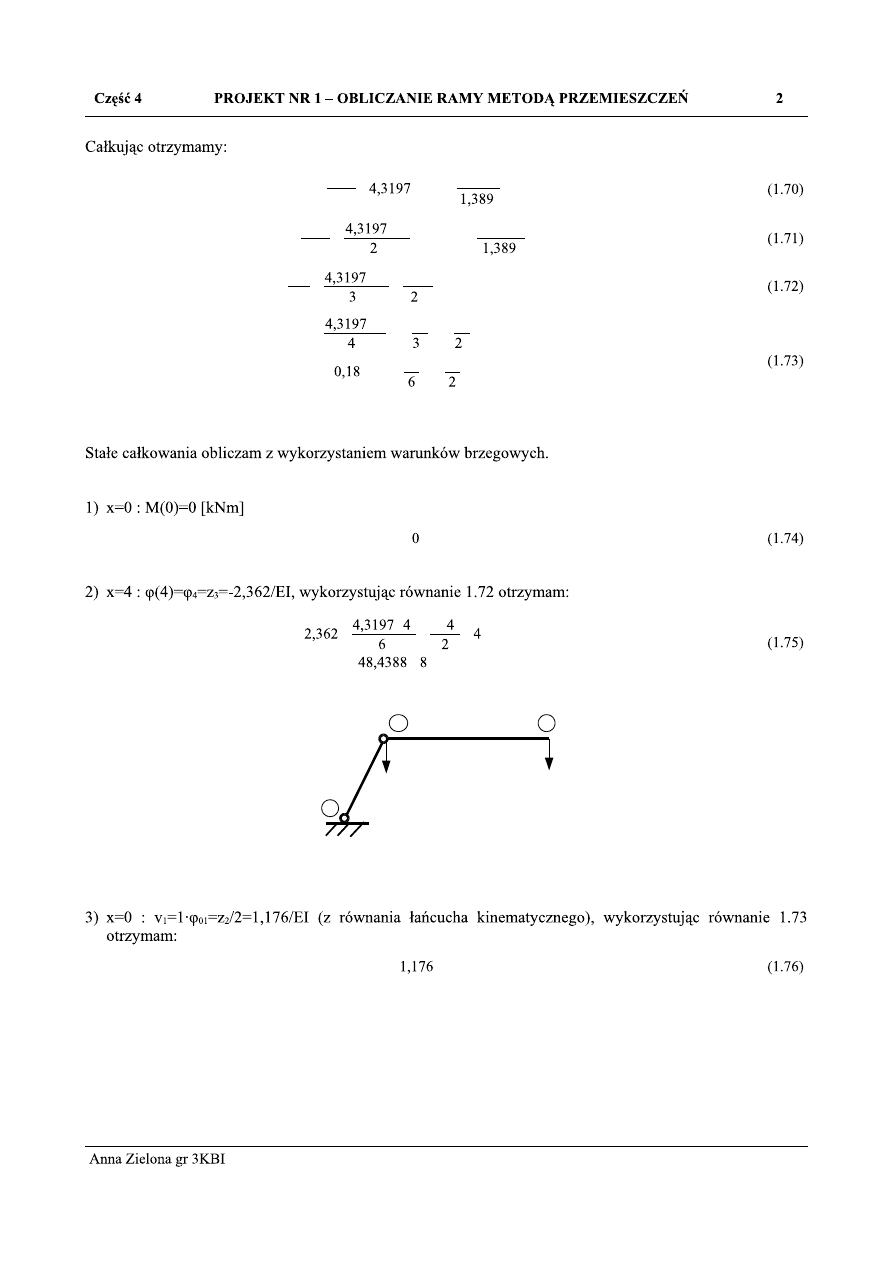
Rys.1.78. Łańcuch kinematyczny dla części ramy 014
D=
Metoda przemieszczeń
AlmaMater

4) x=4 : v
4
=1·φ
01
+4φ
14
=z
2
/2-z
2
=-1,176/EI (z równania łańcucha kinematycznego), wykorzystując równanie
1.73 otrzymam:
−1,176=0,18 ⋅4
4
A⋅4
3
6
B⋅4
2
2
4 CD
−48,432=10,667⋅A4 C
(1.77)
Rozwiązaniem układu równań:
−48,4388=8 AC
−48,432=10,667⋅A4 C
(1.78)
jest para liczb (stałe całkowania):
A=−6,812
C =6,0574
(1.79)
Stąd otrzymujemy równania momentów zginających oraz sił tnących jak niżej:
T x=−1,389⋅4,3197 x−6,812
M x=−1,389 ⋅2,1599 x
2
−6,812
(1.80)
Sprawdzenie wartości przęsłowych przywęzłowych momentów zginających oraz sił tnących:
x=0 ⇒ T 0=9,462 [ kN ] , M 0=0 [ kNm]
x=4 ⇒ T 4=−14,538 [ kN ] , M 4=−10,153 [ kNm]
(1.81)
Wartości sił wewnętrznych w punktach 0 i 4 z obliczeń wg metody przemieszczeń:
x=0 ⇒ T 0=9,462 [ kN ] , M 0=0 [ kNm]
x=4 ⇒ T 4=−14,538 [ kN ] , M 4=−10,152 [ kNm]
(1.82)
Uwaga: ujemne wartości momentów oznaczają rozciąganie włókien górnych pręta!!!
Jak widać znalezione równania momentów zginających oraz sił poprzecznych potwierdzają poprawność
wyników otrzymanych w części 1.1. projektu obliczania ram metodą przemieszczeń.
Anna Zielona gr 3KBI Metoda przemieszczeń
AlmaMater
Wyszukiwarka
Podobne podstrony:
Metoda przemieszczen sprawdzenie rownania rozniczkowego2
Metoda przemieszczen sprawdzenie rownania rozniczkowego7
Metoda przemieszczen sprawdzenie rownania rozniczkowego1
Obliczanie ramy metodą przemieszczeń obliczenie momentów oraz sił tnących korzystając z równania róż
Rownania rozniczkowe linii ugiecia belki, metoda Clebscha Zad 1
Niejednorodne liniowe rownania rozniczkowe
PrzemianyPolityczne Sprawdzian TylkoGeografia
04 Rozdział 03 Efektywne rozwiązywanie pewnych typów równań różniczkowych
Bołt W Równania Różniczkowe
OBLICZANIE PRZEMIESZCZEŃ Z ZASTOSOWANIEM RÓWNANIA PRACY WIRTUALNEJ
raport3 Równania różniczkowe zwyczajne
Metody Komputerowe i Numeryczne, Równania różniczkowe zwyczajne
9 Rownania rozniczkowe id 4845 Nieznany (2)
belka obroty i przesuwy metoda przemieszczeń
anch1012 rownania rozniczkowe
Kochański P, Kortyka P Sposoby rozwiązywania prostych równań różniczkowych zwyczajnych
Szereg Fouriera przyklady, SiMR, Studia inżynierskie, Semestr II 2, Równania różniczkowe, 2012 13
więcej podobnych podstron