Cel ćwiczenia:
Celem ćwiczenia jest zapoznanie się z metodami wyznaczania charakterystyk dynamicznych obiektów i znajdowaniem transmitancji zastępczych.
Zadania do wykonania:
Na podstawie doświadczalnej odpowiedzi skokowej na wymuszenie prostokątnym impulsem - wyznaczyć graficznie odpowiedź skokową obiektu inercyjnego 3-go rzędu (k=1 ; T=20).
Wyznaczyć doświadczalnie odpowiedź skokową obiektu inercyjnego 3-go rzędu (k=1 ; T=20) i porównać z otrzymaną graficzną.
Z otrzymanej w punkcie 2 odpowiedzi skokowej obiektu wyznaczyć parametry zastępcze transmitancji i przyporządkować danemu obiektowi odpowiadającą mu transmitancję zastępczą według Rotacza.
Wyznaczyć doświadczalnie odpowiedź skokową obiekty bez wyrównania, opracować graficznie i przyporządkować obiektowi transmitancję zastępczą.
Wyznaczyć odpowiedzi skokowe układu regulacji z obiektem z wyrównaniem (k=1 ; T=5) i regulatorem typu: a) P (kp=1)
b) PI (kp=1 ; Ti=0,5)
Wyznaczyć odpowiedzi skokowe układu regulacji z obiektem bez wyrównania (całkującym) i regulatorem typu: a) P (kp=1)
b) I (Ti=30)
c) PI (kp=1,2 ; Ti=1)
Skomentować otrzymane wyniki.
Zadania wykonane: ćwiczenie 1.11
Ad 1.
Układ blokowy dla programu TUTSIM.
gdzie:
PLS: A=1 ; to=0s ; tk=200s
FIO1 ÷ FIO3: k=1 ; T=20s
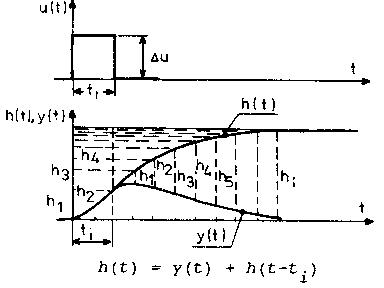
Z otrzymanej charakterystyki - (dołączona do sprawozdania jako charakterystyka nr 1) uzyskaliśmy charakterystykę odpowiedzi skokowej obiektu inercyjnego 3-go rzędu - narysowane ołówkiem (na podstawie zamieszczonego sposobu).
Ad 2.
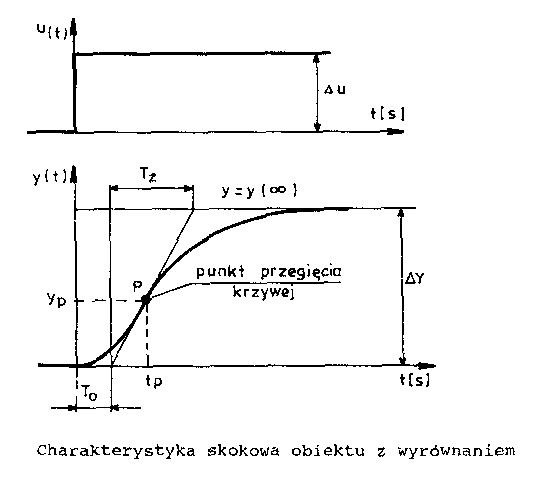
Wyznaczona doświadczalnie odpowiedź skokowa obiektu inercyjnego 3-go rzędu (k=1 ; T=20), zamieszczona jest na dołączonym do sprawozdania jako charakterystyka nr 2.
Otrzymana doświadczalnie charakterystyka w momencie, gdy przechodzi przez tzw. punkt przegięcia P- zaczyna dążyć do wartości ΔY. Charakterystyka otrzymana graficznie - rysowana na podstawie wyżej zamieszczonego rysunku posiada zbliżony charakter.
h(t) = y(t) +h( t - ti )
Ad 3.
Wyznaczmy parametry zastępcze transmitancji do otrzymanej w punkcie 2 odpowiedzi skokowej obiektu. Następnie przyporządkowywujemy danemu obiektowi odpowiadającą mu transmitancję zastępczą według Rotacza.
Parametry zastępcze:
- hp = 0,334
- T0 = 15,79s
- Tz = 75s
- Tzr = Tz(1-hp) = 75(1-0,334) = 49,95s
- T0r = T0+ Tzhp - Tzrln(1/(1-hp) = 15,79 + 75*0,334 -75*ln(1/(1-0,334)) = 10,35s
Transmitancja zastępcza według Rotacza wynosi:
Ad 4.
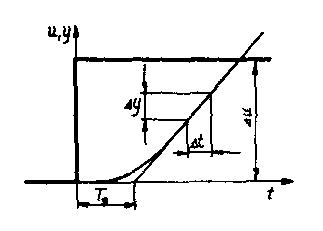
Wyznaczona doświadczalnie odpowiedź skokowa obiektu bez wyrównania - opracowana graficznie (według podanej niżej metody), zamieszczona jest w sprawozdaniu jako charakterystyka nr 3.
Układ blokowy dla programu TUTSIM.
gdzie:
PLS: A=1 ; to=0s ; tk=200s
FIO3 ÷ FIO5: k=0,2 ; T=10s
Δt = 14,47s Δy = 13,16 Δu = 1
Tc = 14,47/13,16 = 1,1s T0 = 30,92s
Transmitancja zastępczą przyporządkowana danemu obiektowi:
lub
Ad 5.
Ćwiczenie 2.1
Układ blokowy dla programu TUTSIM.
Odpowiedź skokowa układu regulacji z obiektem z wyrównaniem i regulatorem typu P:
kp=1 ; T =3,07s ; Δz0 =0,5
Transformata sygnału wejściowego:
Natomiast przebieg czasowy:
Odpowiedź skokowa układu regulacji z obiektem z wyrównaniem i regulatorem typu PI:
kp=1 ; Ti=0,5s
Transformata sygnału wejściowego:
Charakter przebiegu zależy od współczynnika tłumienia ξ. Jest on równy:
co oznacza, iż mamy charakter oscylacyjny, gdyż 0<ξ<1.
Natomiast przebieg czasowy:
Porównując obydwie charakterystyki, można jednoznacznie stwierdzić, iż uzyskanie stabilności w układzie regulacji z obiektem z wyrównaniem jest lepsze, gdy zastosujemy regulator PI.
Ad 6.
Układ blokowy dla programu TUTSIM.
Odpowiedź skokowa układu regulacji z obiektem bez wyrównania i regulatorem typu P:
kp=1 ; T =1,18s ; Δz0 =1
Transformata sygnału wejściowego:
Natomiast przebieg czasowy:
Odpowiedź skokowa układu regulacji z obiektem bez wyrównania i regulatorem typu I:
Ti=30s ; kp=0,001
Odpowiedź skokowa układu regulacji z obiektem bez wyrównania i regulatorem typu PI:
kp=1,2 ; Ti=1s
Transformata sygnału wejściowego:
Charakter przebiegu zależy od współczynnika tłumienia ξ. Jest on równy:
co oznacza, iż mamy charakter oscylacyjny, gdyż 0<ξ<1.
Natomiast przebieg czasowy:
Porównując obydwie charakterystyki, można jednoznacznie stwierdzić, iż uzyskanie stabilności w układzie regulacji z obiektem bez wyrównania jest lepsze, gdy zastosujemy regulator PI. Natomiast gdy stosujemy regulator I w tymże układzie - otrzymujemy układ strukturalnie niestabilny. Uzyskanie stabilności w takim układzie jest możliwe po zmianie struktury układu regulacji.
Wnioski:
Do ćwiczenia 1.11
Charakterystyka odpowiedzi skokowej obiektu inercyjnego 3-go rzędu - narysowana ołówkiem jest mniej dokładna aniżeli charakterystyka otrzymana za pomocą programu TUTSIM wynika to z jej krzywoliniowości (brak odpowiedniej ilości punktów naniesionych ołówkiem).
Każdemu obiektowi przyporządkowaliśmy transmitancje zastępczą według Rotacza. Są jeszcze dwie możliwości przyporządkowania charakterystyk - dopiero porównanie tych trzech mogło by nam bardziej przybliżyć właściwości tych obiektów.
Do ćwiczenia 2.1
Porównując obydwie charakterystyki w punkcie 5, można jednoznacznie stwierdzić, iż uzyskanie stabilności w układzie regulacji z obiektem z wyrównaniem jest lepsze, gdy zastosujemy regulator PI.
Porównując obydwie charakterystyki zestawione w punkcie 6, można także stwierdzić, iż uzyskanie stabilności w układzie regulacji z obiektem bez wyrównania jest lepsze, gdy zastosujemy regulator PI. Natomiast gdy stosujemy regulator I w tymże układzie - otrzymujemy układ strukturalnie niestabilny. Uzyskanie stabilności w takim układzie jest możliwe po zmianie struktury układu regulacji.
Wyszukiwarka
Podobne podstrony:
AutomatykaII 11
Saba Schwarzwald Automatic 11 Schematic
AUTOMATY 11 Te dobre kurna
Automatyka 11
Automatyka (wyk 11 12) ppt [try Nieznany
003HISTORIA SZTUKI WCZESNOCHRZEŚCIJAŃSKIEJ I BIZANTYJASKIEJ WYKŁAD III 3 11 09 (Automatycznie zapisa
Automaty ściąga do ćw 11
sprawko automatyka no 11
26-11, Automatyka i Robotyka, Semestr I, Fizyka, Semestr 2, Laboratoria, Instrukcje, Zadanie 11, Pom
wstęp ćw 11, PWr W9 Energetyka stopień inż, IV Semestr, Podstawy automatyki - laboratorium, Podsatwy
automatyka i sterowanie wyklad 11
26-5, Automatyka i Robotyka, Semestr I, Fizyka, Semestr 2, Laboratoria, Instrukcje, Zadanie 11, Pomo
har ST Ii AIR AMU 6 l 11 12, Automatyka i robotyka air pwr, VI SEMESTR
26-6, Automatyka i Robotyka, Semestr I, Fizyka, Semestr 2, Laboratoria, Instrukcje, Zadanie 11, Pomo
11 Podstawy automatyki - Transformata Z, PWr W9 Energetyka stopień inż, III Semestr, Podstawy automa
CLAB 11 2010-2011, Automatyka i Robotyka, Język programowania
11 automaty gotowe
11, wojtek studia, Automatyka, studia 2010, obrona inz, Pytania na obrone, brak tematu , dyplomowka
więcej podobnych podstron