ZBIEŻNE UKŁADY SIŁ
Sposób geometryczny wyznaczania wypadkowej - polega na zbudowaniu wieloboku sił, w którym wektory sił odkłada się równolegle do ich linii działania (jako wektory swobodne)
Płaski układ sił zbieżnych:
Płaski układ sił zbieżnych P1, P2 ,P3, ... , Pn przyłożonych do punktu O można zastąpić siłą wypadkową P równą sumie geometrycznej tych sił i przyłożoną również w punkcie O.
Płaski układ sił zbieżnych:
Sposób geometryczny wyznaczania wypadkowej polega na zbudowaniu wieloboku sił, w którym wektory sił odkłada się równolegle do ich linii działania (jako wektory swobodne).
Z dowolnego punktu odkłada się wektor P, z jego końca wektor P1, z końca wektora P1 wektor P2 i tak kolejno wektory, aż do Pn. Wektor P poprowadzony od początku wektora P do końca wektora Pn jest sumą geometryczną wektorów P1,P2,P3,...,Pn.
Płaski układ sił zbieżnych P1,P2,P3,...,Pn przyłożonych do punktu O można zastąpić wypadkową P, równą sumie geometrycznej tych sił i przyłożoną również w punkcie O.
Wypadkowa płaskiego układu sił zbieżnych jest wektorem posuwnym, ponieważ ma określoną linię działania, podczas gdy suma geometryczna jest wektorem swobodnym.
W sposobie analitycznym wyznaczenia wypadkowej wykorzystuje się twierdzenie o rzucie sumy wektorów.
Twierdzenie o rzucie sumy wektorów:
Rzut sumy geometrycznej wektorów i na dowolną oś równy jest sumie rzutów tych wektorów na tę samą oś.
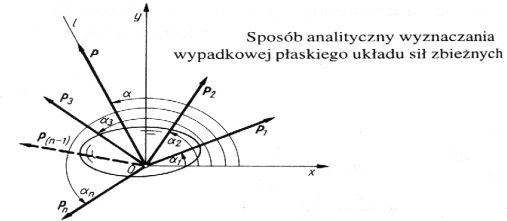
układ dwóch wzajemnie prostopadłych osi Oxy,
kąty nachylenia sił P1 P2, P3,, Pn do osi x, oznaczono odpowiednio przez 1, 2, 3,. . n
wypadkowa sił działa wzdłuż prostej I przechodzącej przez punkt O i nachylonej do osi x pod kątem
wartość wypadkowej P i kąta nie jest znana dlatego należy je wyznaczyć
Wyznaczenie wypadkowej P i kąta ၡ
- wyznaczenie składowych Px i Py
- określenie wartości liczbowych wypadkowej P i kąta a
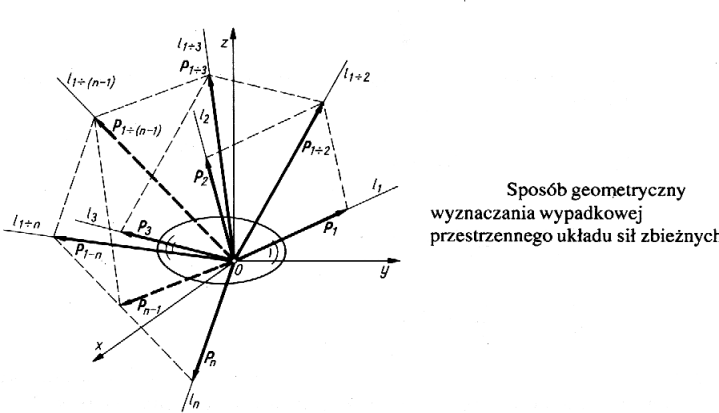
Przestrzenny układ sił zbieżnych:
Przestrzenny układ sił zbieżnych P1, P2,..., Pn przyłożonych do jednego punktu O można zastąpić jedną siłą wypadkową P przyłożoną w tymże punkcie i równą sumie geometrycznej tych sił.
Wypadkowa dowolnej liczby n sił przyłożonych do jednego punktu:
Sposób geometryczny wyznaczania wypadkowej
Zastosowanie zasady równoległoboku
Sposób analityczny wyznaczenia wypadkowej
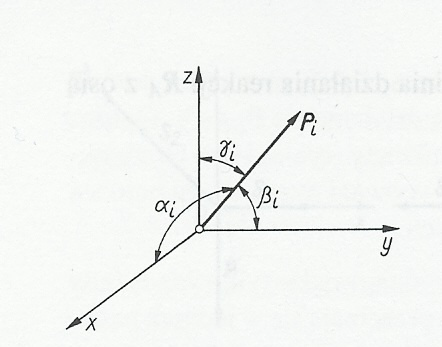
Aby wyznaczyć wypadkową układu sił P1, P2 ,....,Pn, których linie działania przechodzą przez punkt 0, przyjmuje się prostokątny układ osi Oxyz.
Oznaczając kąty nachylenia sił do osi x, y, z przez: αi, βi, γi, (i =1,2,..,n), oblicza się wartości algebraiczne rzutów wypadkowej P sił Pi, na odpowiednie osie układu
Obliczenie wartości składowych
Określenie wartości liczbowej (modułu) wypadkowej P oraz jej cosinusów kierunkowych:
Linia działania wypadkowej przechodzi przez punkt 0, przez który przechodzą linie działania sił P.
We wzorach α, β, γ oznaczają kąty, które wypadkowa P tworzy z osiami współrzędnych.
Cosinusy kierunkowe spełniają zależność: cos2α + cos2β + cos2γ = 1
Równowaga płaskiego układu sił zbieżnych
W szczególnym przypadku suma geometryczna płaskiego układu sił zbieżnych może być równa zeru.
Wielobok zbudowany z tych sił jest wielobokiem zamkniętym a układ jego jest w równowadze.
Warunki równowagi płaskiego układu sił zbieżnych
1. Aby układ sił zbieżnych P1, P2, ... , Pn działających w jednej płaszczyźnie znajdował się w równowadze, wielobok utworzony ze wszystkich sił tego układu musi być zamknięty (warunek geometryczny).
Powyższemu warunkowi odpowiada następujące równanie wektorowe:
P1 + P2 + ... + Pn =
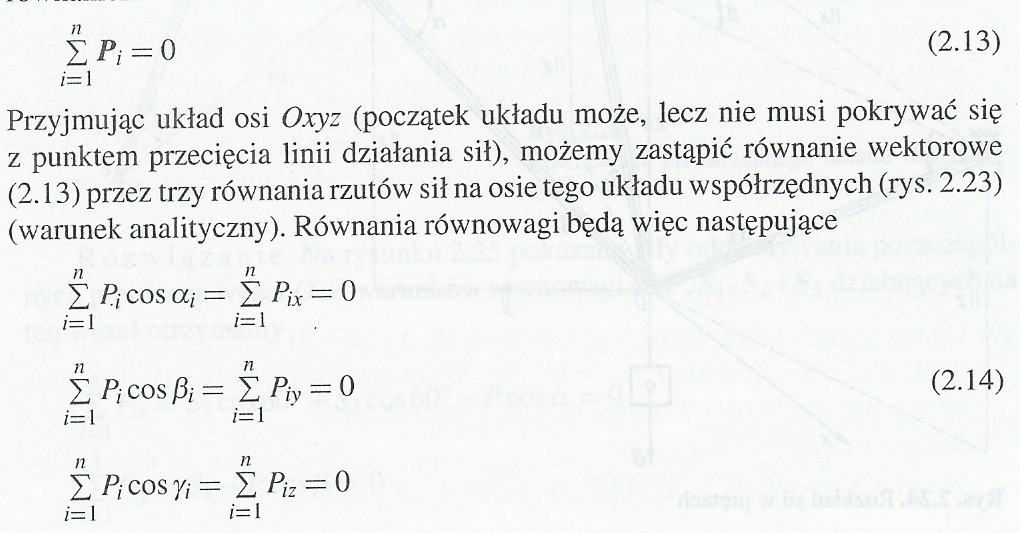
2. Aby siły zbieżne leżące w jednej płaszczyźnie były w równowadze, sumy rzutów tych sił na osie układu współrzędnych muszą być równe zeru (warunek analityczny).
Równania równowagi sił zbieżnych działających w jednej płaszczyźnie są następujące:
Rozwiązywanie zagadnień równowagi płaskiego układu sił zbieżnych
Dla układu sił zbieżnych o określonych liniach działania, należy dysponować danymi liczbowymi
(n- 2) sił. Wartości liczbowe dwóch niewiadomych sił można wyznaczyć z warunku równowagi. Zakłada się, że na bryłę działają trzy nierównoległe siły P1 P2 i P3 (rys. a), będące w równowadze.
Równowaga trzech sił nierównoległych
Wypadkowa dwóch z tych sił (np. P1 i P2 czyli P1,2) musi się równoważyć z siłą trzecią P3, a więc siły P1,2 i P3 muszą być równe co do wartości liczbowych, przeciwne co do kierunku i muszą działać wzdłuż jednej prostej. Stąd wynika, że linia działania siły P3 musi przechodzić także przez punkt 0, w którym przecinają się linie działania sił P1 i P2 . Oprócz tego, wielobok (trójkąt) sił P1 ,P2 i P3 musi być zamknięty (rys. b).
Równowaga przestrzennego układu sił zbieżnych:
Warunek równowagi w postaci wektorowej
19
Wyszukiwarka
Podobne podstrony:
Zbieżne uklady sił
1. Zbiezny uklad sil
Pr dom 3 dowolne przestrzenne układy sił
3 Zbieżny układ sił
3 4 zbiezny uklad sil
Mechanika Techniczna II, Płaski zbieżny układ sił
1 Zbiezny uklad sił
PLASKIE UKLADY SIL, Studia, Budownictwo Ladowe i Wodne, Semestr II, Mechanika ogolna
Mechanika Techniczna I Statyka Zbieżny Układ Sił
Wykl III 14 1 3 Układy trójfazowe niesymetryczny wzór
referat zbieżny ukad sił
uklady sil
więcej podobnych podstron