Badania operacyjne (część 4)
Metody obliczeniowe zagadnienia minimalizacji
Zagadnienie optymalizacyjne
Funkcja celu (kryterium decyzyjne)
f(x) = f(x1, x2, … , xn)
Zmienne decyzyjne (wielkości optymalizowane)
xj (j=1, 2, … , n)
Ograniczenia, warunki ograniczające (funkcja nakładów)
Vi(x) = Vi(x1, x2, … , xn) (i=1, 2, … , m) (warunki uboczne).
Funkcje celu i nakładów są ciągłe i różniczkowalne (posiadają ciągłe pochodne cząstkowe pierwszego i drugiego rzędu) i są określone na n-wymiarowym wektorze x o nieujemnych składowych
x
0 (warunki brzegowe)
Zadanie optymalizacyjne polega na wyznaczeniu ekstremum (maksimum lub minimum) funkcji celu przy zadanych ograniczeniach.
Zadanie optymalizacyjne ma rozwiązanie jeśli nie jest wewnętrznie sprzeczne (zbiór rozwiązań dopuszczalnych nie jest zbiorem pustym) oraz gdy m
n.
Ekstremum funkcji n zmiennych
Funkcja celu - f(x) = f(x1, x2, … , xn)
Gradient funkcji celu w punkcie
Jakobian funkcji f (o m wartościach wektorowych) -
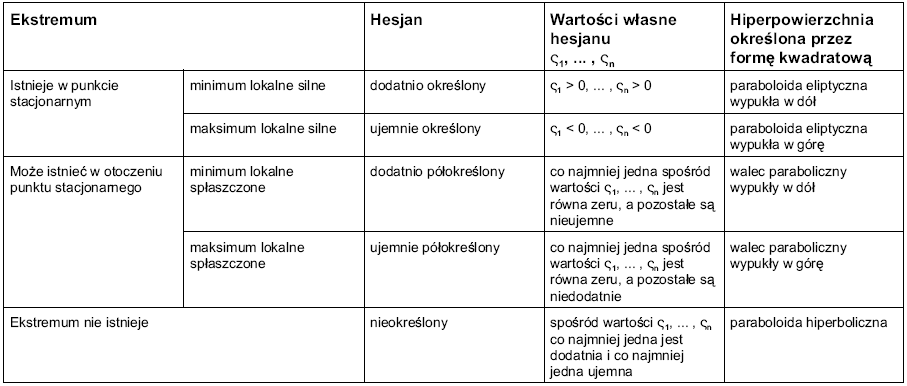
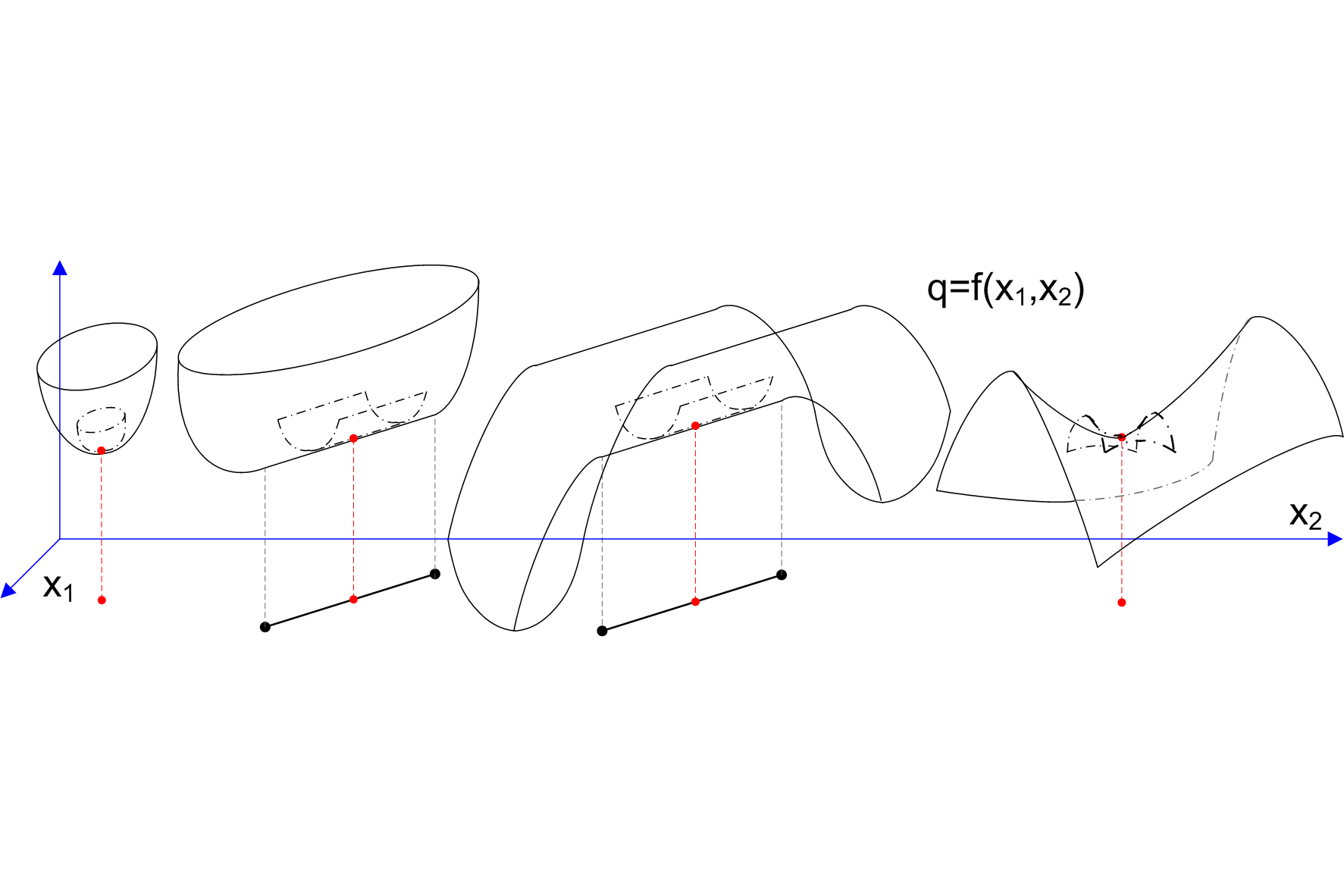
Hesjan funkcji f(x) w punkcie
Forma kwadratowa -
\
Metody obliczeniowe optymalizacji
Metody rzędu zerowego, nie korzystające w sposób jawny z pochodnych funkcji kryterium (np. metoda sympleksu)
wady: niezwykle wolna zbieżność do rozwiązania.
Metody gradientowe (np. gradientu prostego)
zalety: zbieżność globalna, niewygórowane wymagania wobec postaci funkcji kryterium f(x), prostota algorytmu,
wady: wolna zbieżność, konieczność wyboru długości kroku wzdłuż kierunku gradientu.
Metody rzędu drugiego (newtonowskie)
zalety: szybka zbieżność,
wady: wymagania wobec postaci funkcji kryterium, złożoność obliczeniowa, trudności z obliczeniem macierzy drugich pochodnych.
Metody quasi-newtonowskie (przybliżające wartość hesjanu przy pomocy jakobianu).
Sympleks
Algorytm rozwiązywania zagadnień optymalizacji, tworzący zbiór bazowych rozwiązań dopuszczalnych - zbieżny do rozwiązania zagadnienia optymalizacji.
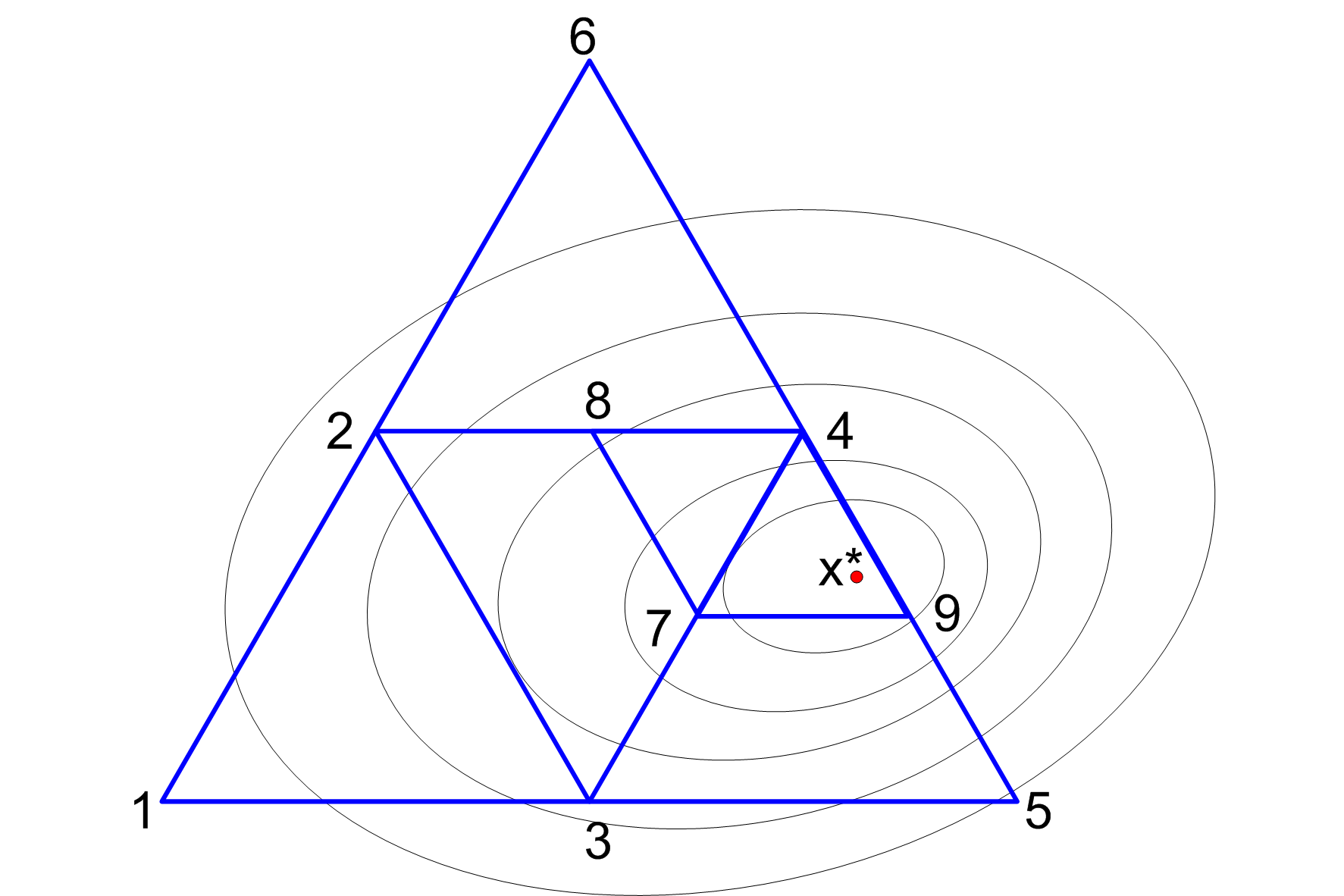
Sympleks - n-wymiarowy wielościan wypukły o n+1 wierzchołkach. W przestrzeni jednowymiarowej (na prostej) sympleks jest odcinkiem, na płaszczyźnie dwuwymiarowej - trójkątem, w trójwymiarowej - czworościanem, itd. Brzegi sympleksu (powierzchnie boczne) są sympleksami niższych wymiarów.
Dla n+1 punktów wierzchołkowych x0, x1, … , xn zostają obliczone wartości funkcji kryterium f(x0), f(x1), … f(xn). Konstrukcja kolejnego sympleksu polega na odrzutowaniu punktu xj najbardziej odbiegającego od założonego kierunku poszukiwania ekstremum, względem płaszczyzny przeciwległej powierzchni bocznej.
Przy zbliżeniu się do ekstremum zostaje zmniejszona wielkość sympleksu, przy braku postępów optymalizacji - jego wielkość jest powiększana.
Metoda kierunków sprzężonych Powella
Aproksymacja w otoczeniu punktu x wartości funkcji kryterium f(x) szeregiem Taylora
f(x) = f(xk) + *f(xk) [x - xk]T + ½ [x - xk] *2f(xk) [x - xk]T + R(x)
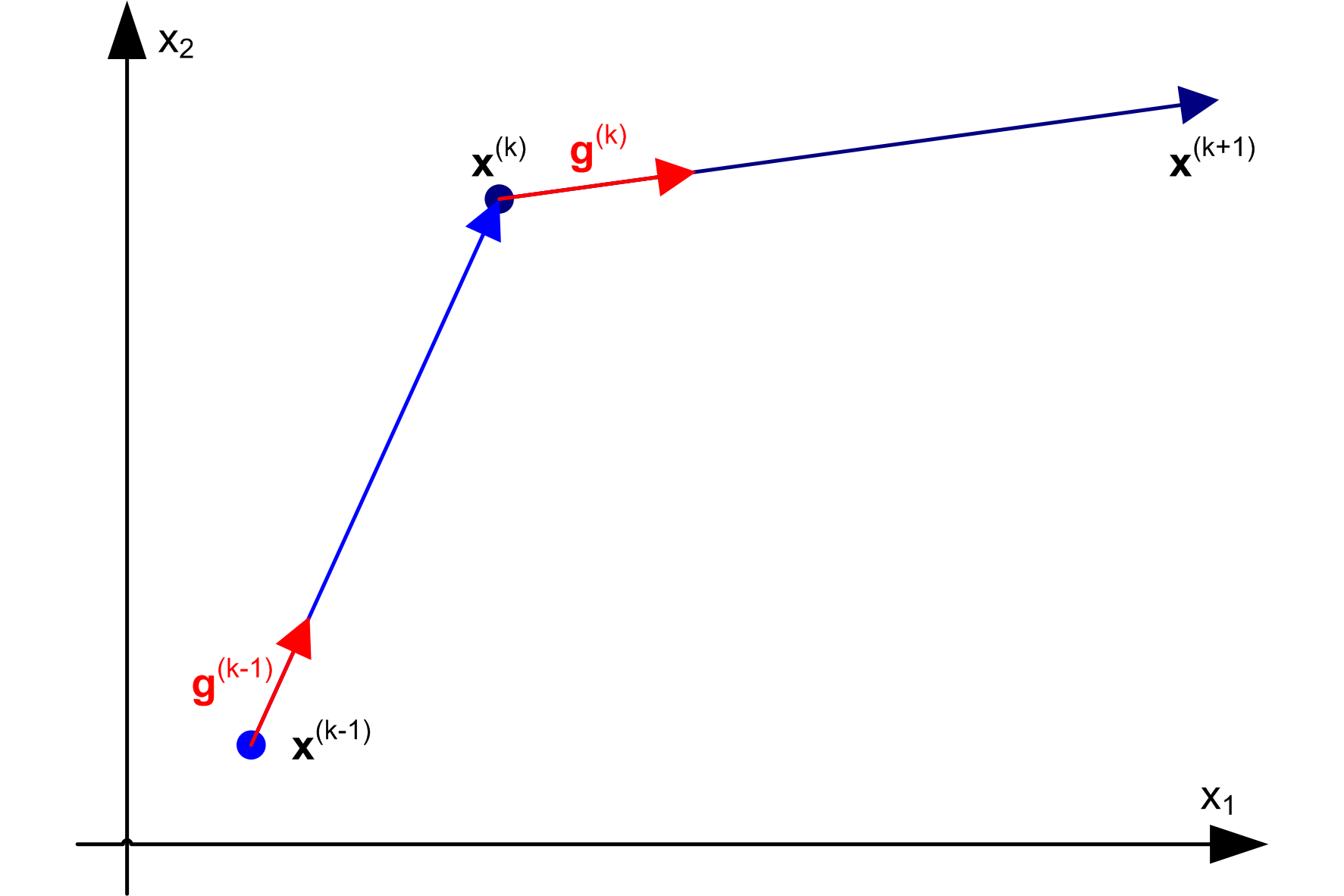
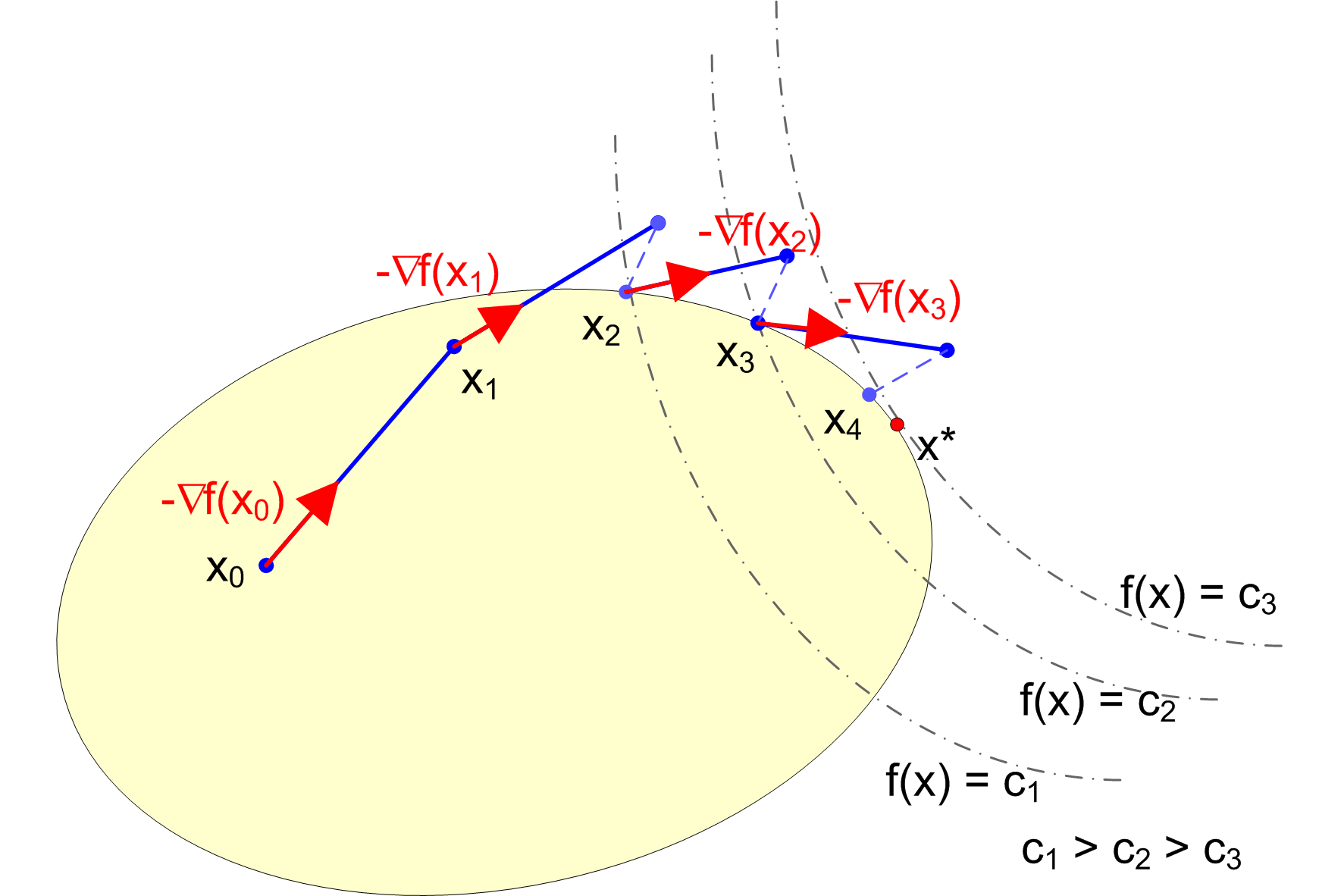
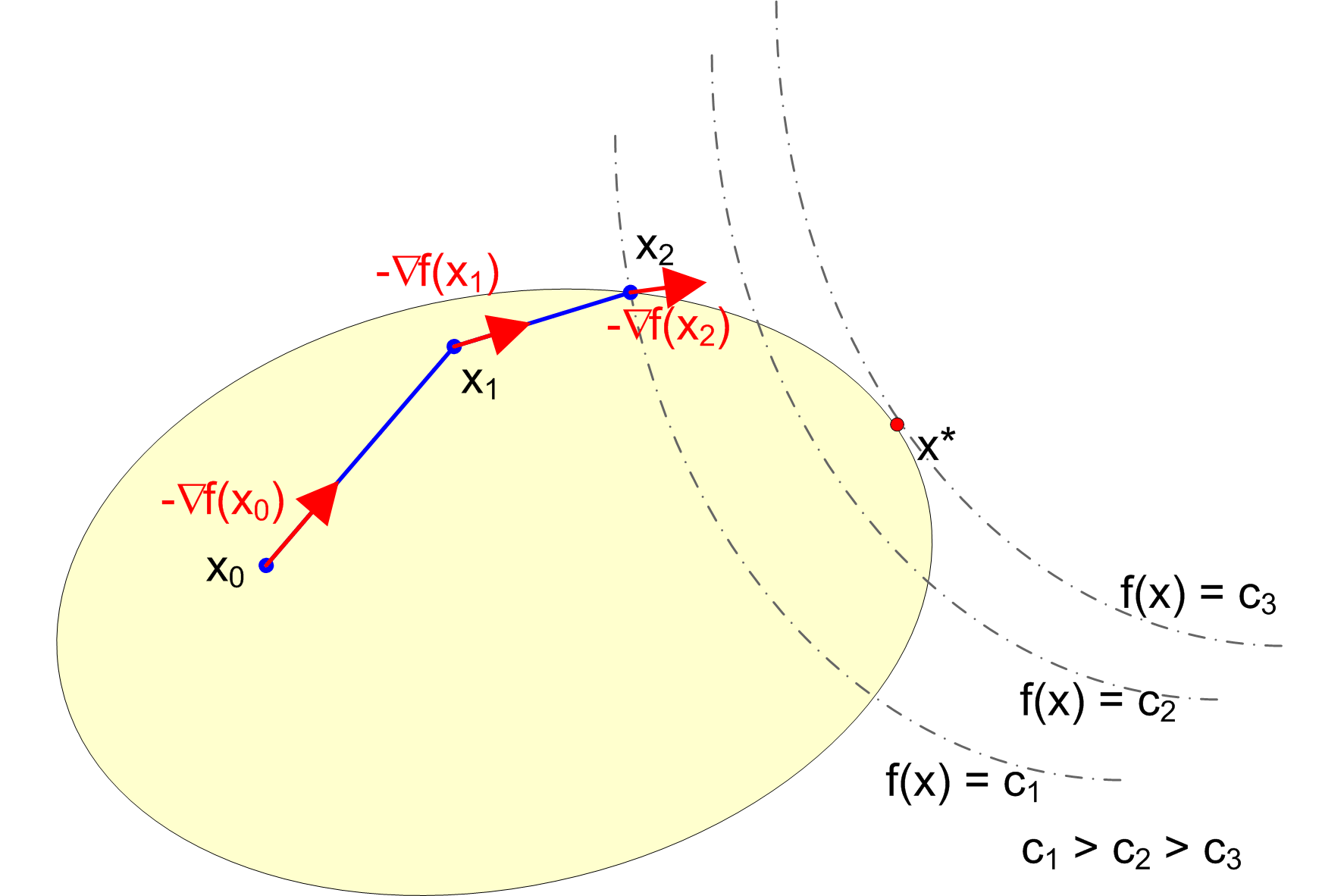
Metoda gradientu prostego
Metoda gradientu prostego
xk+1 = xk -
k*f(xk)
k - długość kroku, dobierana podczas minimalizacji funkcji kryterium wzdłuż kierunku gradientu.
Wady:
niezbyt wysoka (w porównaniu z metodami drugiego rzędu) efektywność
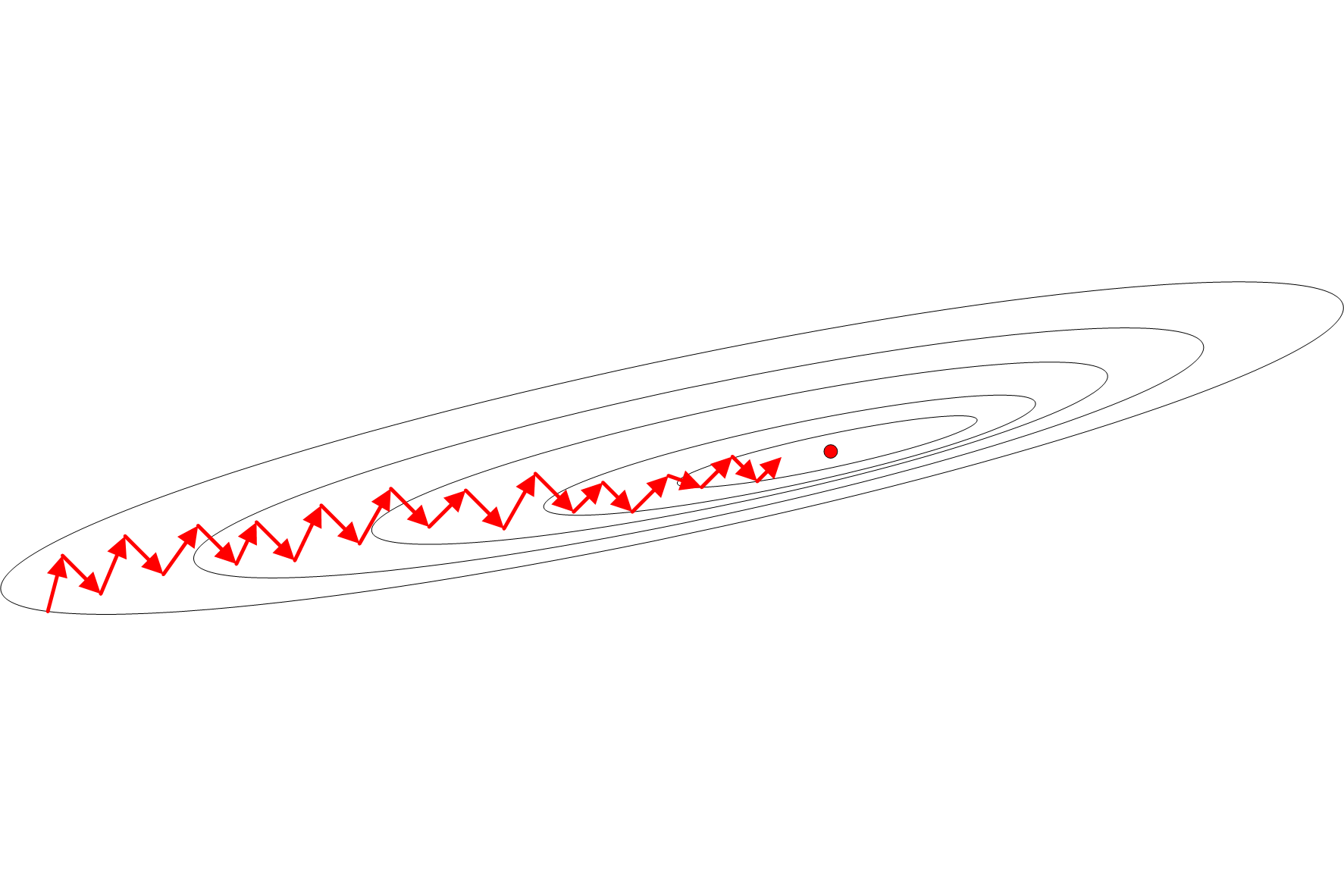
`zygzakowanie' w przypadku funkcji o wyciągniętych poziomicach.
Metoda Newtona
Iteracyjna metoda optymalizacji drugiego rzędu
xk+1 = xk+1 -
k*f(xk) H-1 (xk)T
k - długość kroku, dobierana podczas minimalizacji funkcji kryterium wzdłuż kierunku gradientu.
Metody quasi-newtonowskie
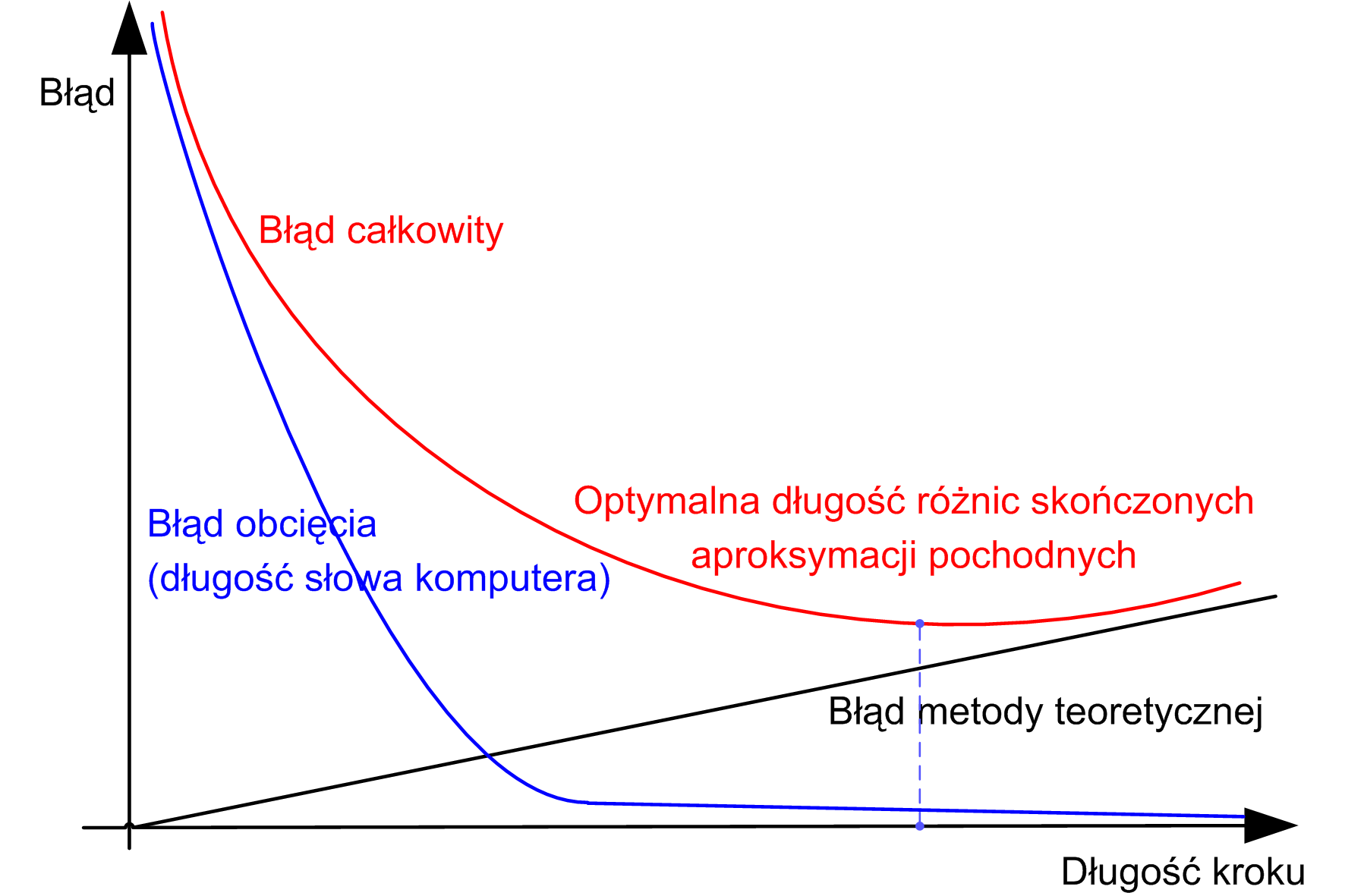
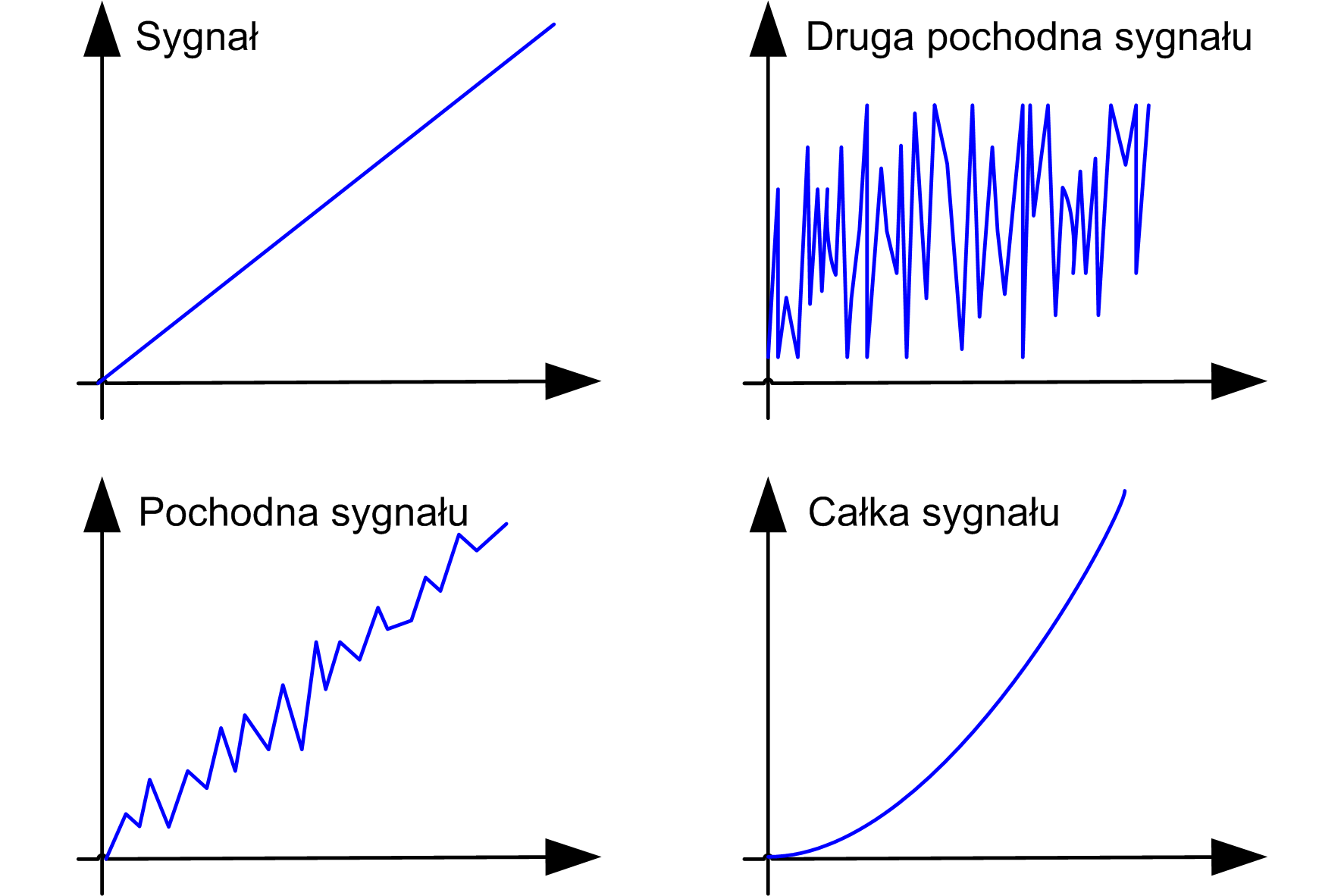
Konieczność zastąpienia hesjanu aproksymacją jakobianem (macierzą pierwszych pochodnych funkcji kryterium). Potrzeba ta wynika z ogromnego wpływu stosowania różnic skończonych do aproksymacji drugich pochodnych.
Aproksymacja pochodnych różnicami skończonymi
Różnice skończone
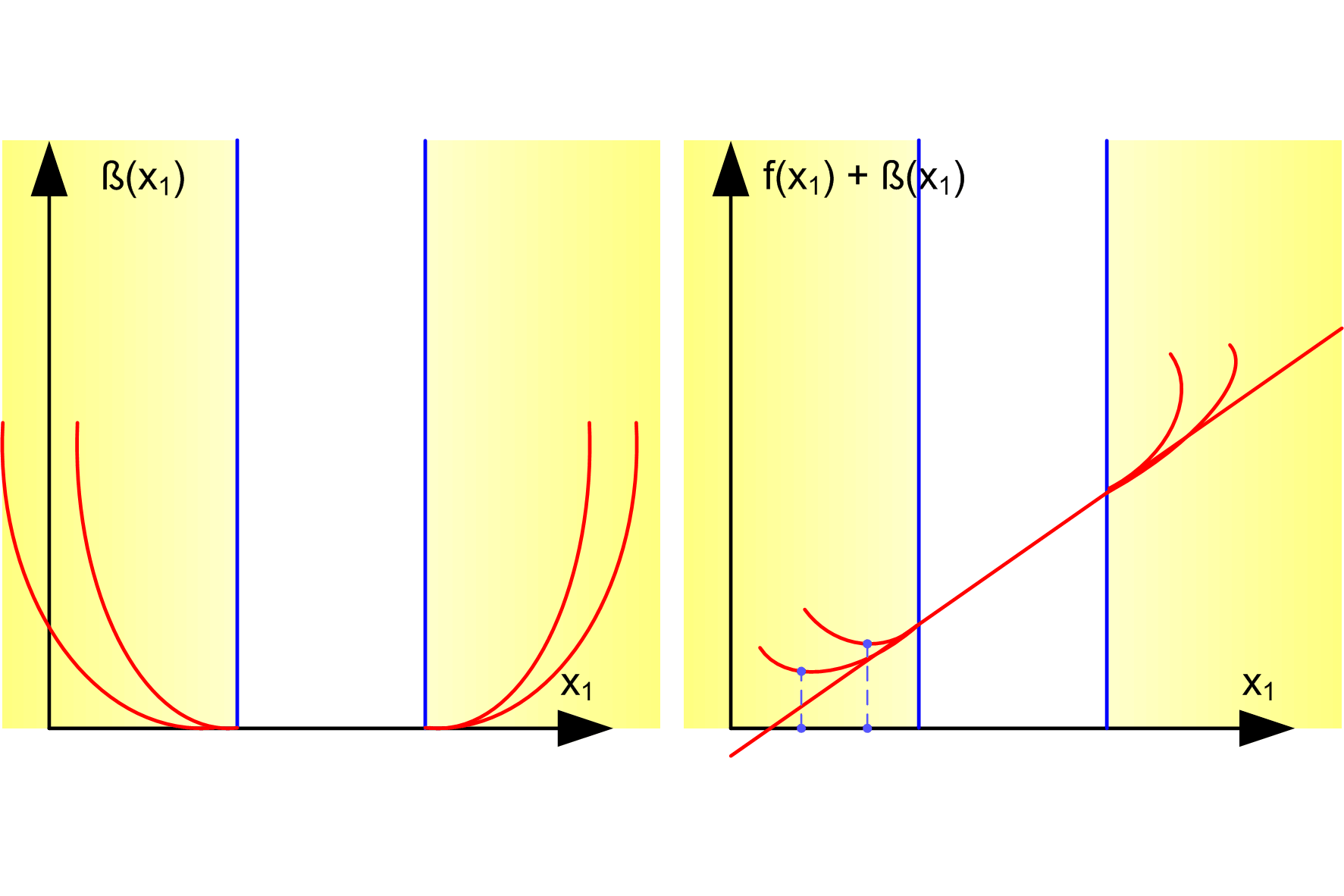
Metody kary wewnętrznej i barier
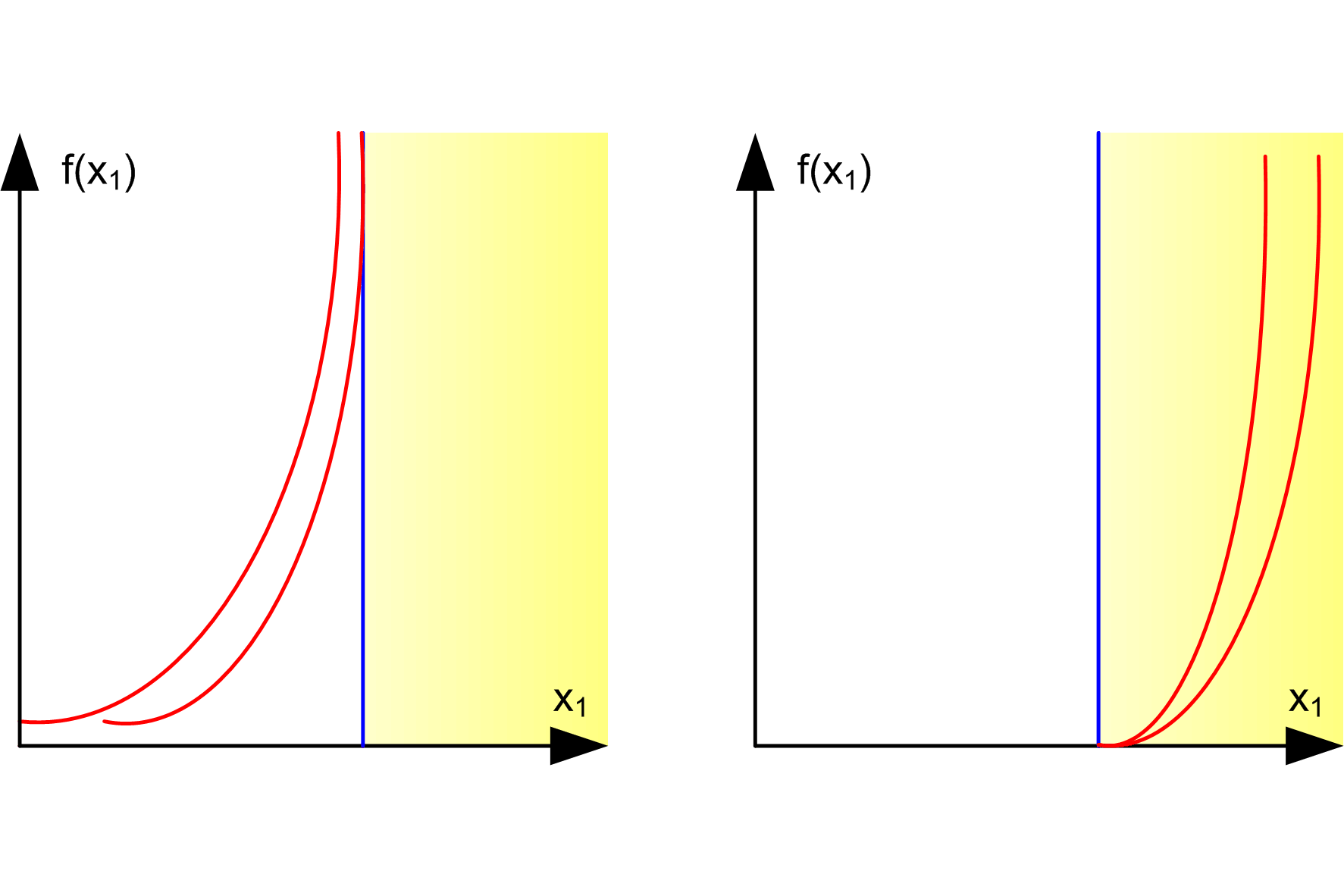
Metody zewnętrznych barier
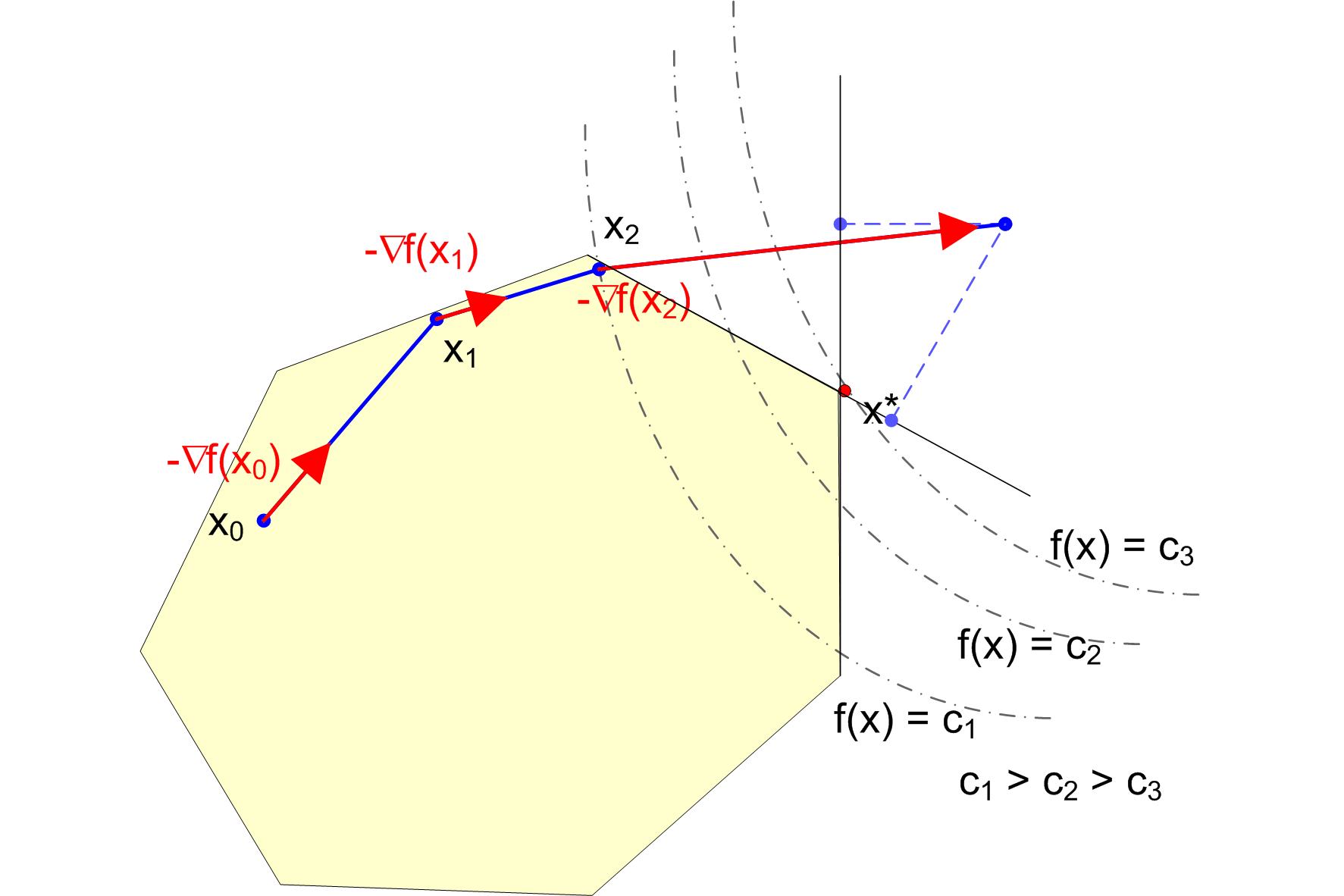
Metoda rzutowania gradientu (B.Rosena)
Metoda redukcji gradientu
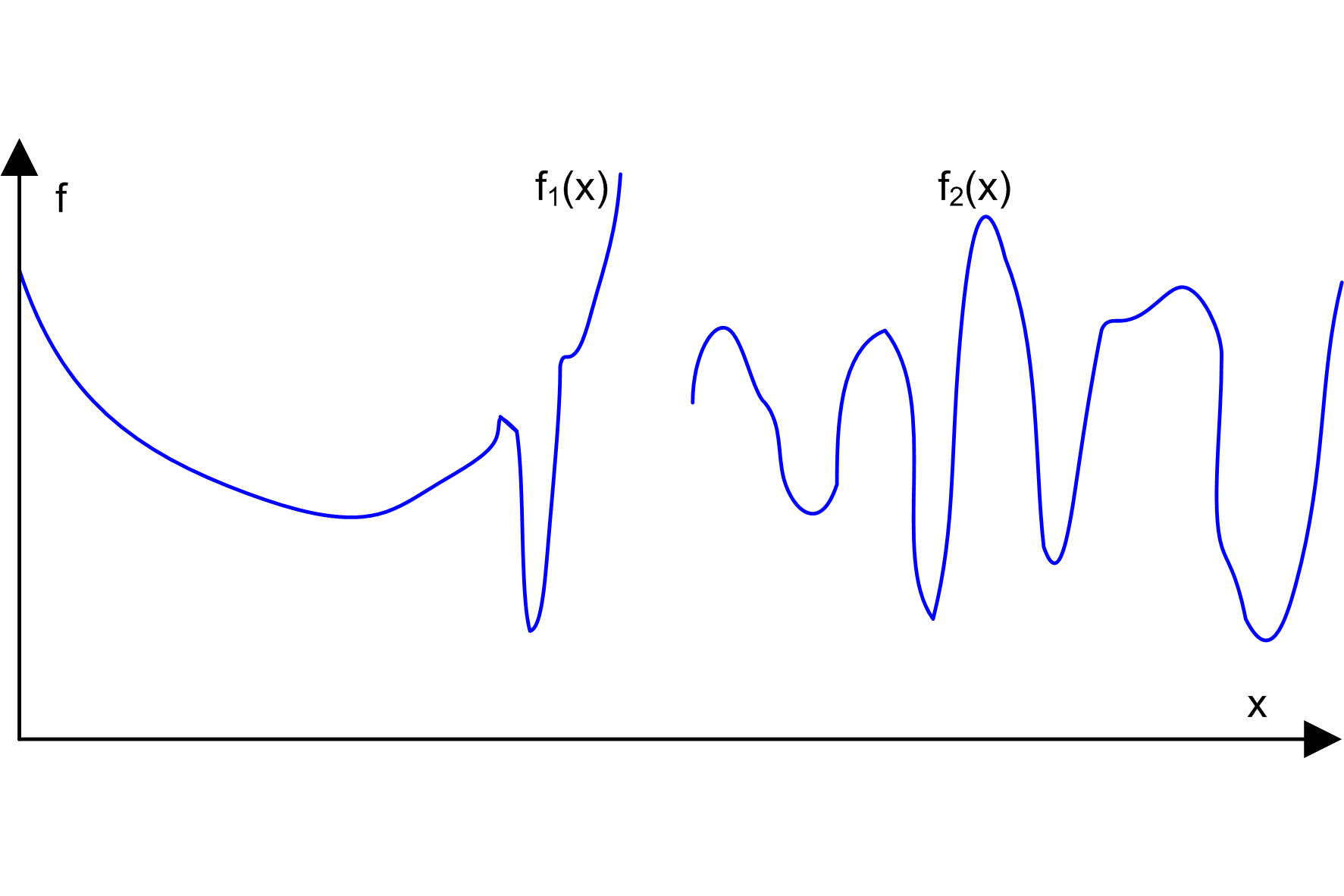
Trudności
Funkcje trudne do optymalizacji
Porównywanie metod
Zagadnienia testowe
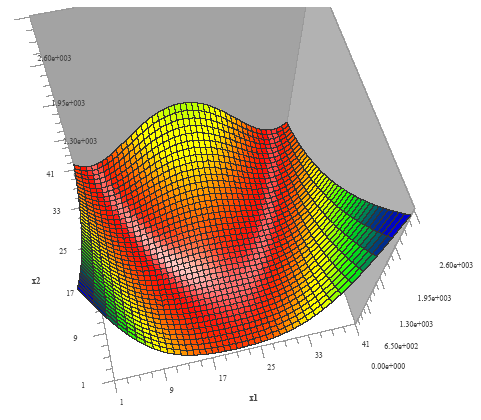
Funkcja Rosenbrocka („dolina bananowa”)
f(x) = 100 (x2 - x12)2 + (1 - x1)2
x0 = (- 1.2; 1), x* = (1; 1), f* = 0
Funkcja Powella
f(x) = (x1 + 10 x2)2 + 5 (x3 - x4)2 + (x2 - 2x3)4 + 10 (x1 - x4)4
x0 = (3; - 1; 0; 1), x* = (0; 0; 0; 0), f* = 0
Funkcja Rosenbrocka („dolina bananowa”)
f(x) = 100 (x2 - x12)2 + (1 - x1)2
x0 = (- 1.2; 1), x* = (1; 1), f* = 0
Wąska dolina o stromych zboczach i niewielkim spadku dna, zakrzywiona
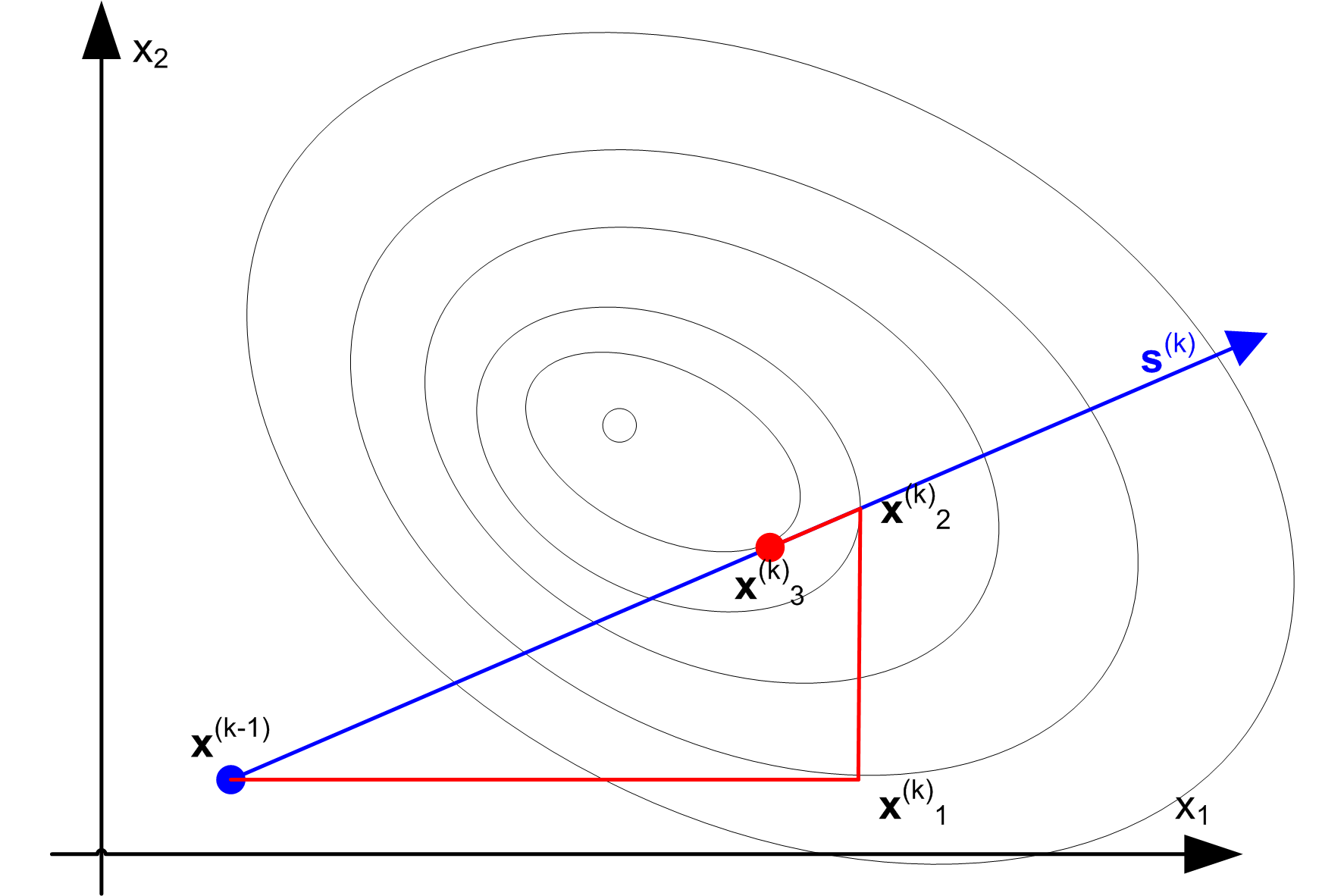
Gradientowe metody obliczeniowe optymalizacji:
- wyznaczenie kierunku,
- minimalizacja funkcji wzdłuż wyznaczonego kierunku.
Wyszukiwarka
Podobne podstrony:
wykład 1 Rybinski
wykład 3 Rybinski
wykład 2 Rybinski
Napęd Elektryczny wykład
wykład5
Psychologia wykład 1 Stres i radzenie sobie z nim zjazd B
Wykład 04
geriatria p pokarmowy wyklad materialy
ostre stany w alergologii wyklad 2003
WYKŁAD VII
Wykład 1, WPŁYW ŻYWIENIA NA ZDROWIE W RÓŻNYCH ETAPACH ŻYCIA CZŁOWIEKA
Zaburzenia nerwicowe wyklad
Szkol Wykład do Or
Strategie marketingowe prezentacje wykład
Wykład 6 2009 Użytkowanie obiektu
wyklad2
wykład 3
więcej podobnych podstron