Filtry
cyfrowe
FILTRY CYFROWE
Wstęp
Filtry cyfrowe są często spotykanymi algorytmami cyfrowego przetwarzania sygnałów, spotykanymi w prawie wszystkich układach DSP.
N a
przykładzie analogowego filtra dolnoprzepustowego RC przedstawiono
wyprowadzenie podstawowych zależności dla filtra cyfrowego.
a
przykładzie analogowego filtra dolnoprzepustowego RC przedstawiono
wyprowadzenie podstawowych zależności dla filtra cyfrowego.
Prądy i napięcia w tym układzie można powiązać przy pomocy równania:

gdzie
 -stała
czasowa obwodu,
-stała
czasowa obwodu,
 ,
,

(po podstawieniu)
 .
Przyjmujemy, że y
jest próbkowany z częstotliwością
.
Przyjmujemy, że y
jest próbkowany z częstotliwością
 ,
a okres próbkowania jest mały w porównaniu ze stałą czasową
obwodu. W tym przypadku można zastosować przybliżenie
różniczkowania w postaci:
,
a okres próbkowania jest mały w porównaniu ze stałą czasową
obwodu. W tym przypadku można zastosować przybliżenie
różniczkowania w postaci:
 ,
gdzie
,
gdzie
 -jest n-tą
próbką mierzonej na wyjściu filtra wartości a
-jest n-tą
próbką mierzonej na wyjściu filtra wartości a
 -poprzednią próbką. Można zastąpić równanie różniczkowe
filtra równaniem różnicowym:
-poprzednią próbką. Można zastąpić równanie różniczkowe
filtra równaniem różnicowym:
przekształconym do postaci:
Równanie to opisuje filtr cyfrowy pierwszego rzędu.
Uogólnienie powyższego równania prowadzi do zależności opisującej przekształcenie danego wektora x w nowy wektor y przez przekształcenie dane wzorem:

Równanie to opisuje filtr
cyfrowy N-tego
rzędu, gdzie
 .
.
Taki filtr może być reprezentowany przez schemat pokazany poniżej:
Współczynniki
 są znormalizowane przez podzielenie ich przez
są znormalizowane przez podzielenie ich przez
 .
Moduł
.
Moduł
 oznacza jednostkowe przesunięcie w czasie. W każdym etapie obliczeń
należy zapamiętać wartości
oznacza jednostkowe przesunięcie w czasie. W każdym etapie obliczeń
należy zapamiętać wartości
 .
.
IMPLEMENTACJA filtra przebiega następująco:
INICJALIZACJA
Wektor wartości początkowych
 jest zapamiętywany w komórkach
.
Jeśli wartości początkowe nie są znane wpisuje się wartości
zerowe.
jest zapamiętywany w komórkach
.
Jeśli wartości początkowe nie są znane wpisuje się wartości
zerowe.
Wartości współczynników
 i
i
 są normalizowane przez podzielenie ich przez
.
są normalizowane przez podzielenie ich przez
.
GŁÓWNA PĘTLA
Obliczenie wartości
Aktualizacja wartości
 zgodnie z zależnością:
zgodnie z zależnością:
 a
a

Pętla jest wykonywana dopóki nie skończy się wektor wejściowy x.
KONIEC. Wartości Zj są kopiowane do wektora wartości wyjściowych.
Obliczenia przy pomocy funkcji filter
FILTER (help filter)
Jednowymiarowy filtr cyfrowy. Y = FILTER(B,A,X) filtruje dane z wektora X przy pomocy filtra opisanego wektorami A i B i tworzy wektor wyjściowy Y.
Jest to implementacja równania różnicowego:
a(1)*y(n) = b(1)*x(n) + b(2)*x(n-1) + ... + b(nb+1)*x(n-nb)
a(2)*y(n-1) - ... - a(na+1)*y(n-na)
[Y,Zf] = FILTER(B,A,X,Zi) umożliwia dostęp do wartości początkowych Zi i końcowych Zf.
Przykład 1
x=[1,2,1,2,1,2,1,2,1,2];
B=[0.5];
A=[1,-0.25,-0.25];
[y,Zf]=filter(B,A,x)
y(:)=0.5000
1.1250
0.9063
1.5078
1.1035
1.6528
1.1891
1.7105
1.2249
1.7338
Zadanie: Przeprowadzić kilka obliczeń przy pomocy funkcji filter z dowolnymi danymi.
Przykład 2
Przeprowadzamy filtrację sygnału losowego – szumu przy pomocy filtra Butterwortha piątego rzędu dolnoprzepustowego o częstotliwości odcięcia 30 Hz. Sygnał jest próbkowany z częstotliwością 100 Hz.
help butter
BUTTER Wyznaczenie współczynników filtra Butterwortha
[B,A] = BUTTER(N,Wn) wylicza filtr N-tego rzędu dolnoprzepustowy. Częstotliwość odcięcia musi być 0.0 < Wn < 1.0, gdzie 1.0 odpowiada połowie częstotliwości próbkowania.
X=rand(1000,1); sygnał
[b,a]=butter(5,30/50); obliczenia współczynników
b =
0.1084 0.5419 1.0837 1.0837 0.5419 0.1084
a =
1.0000 0.9853 0.9738 0.3864 0.1112 0.0113
Y=filter(b,a,X); przeprowadzamy filtrację
sygnał wejściowy sygnał wyjściowy
Zadanie: Przeprowadzić filtrację sygnału X filtrami o różnych rzędach, typach, dolno- górnoprzepustowy (patrz help butter) i różnych częstotliwościach odcięcia. Wykreślić sygnał Y [plot(Y)], podać wnioski.
Projektowanie filtrów cyfrowych
Zadaniem jest zaprojektowanie filtra cyfrowego o zadanej charakterystyce amplitudowej. W toolboxie Signal Processing jest wiele narzędzi do projektowania filtrów. Omówimy dwie funkcje yulewalk i fir2.
Przy pomocy operatora opóźnienia jednostkowego z-1 można przedstawić filtr H przy pomocy zależności:

g dzie
dzie
 i co najmniej jeden ze współczynników
i co najmniej jeden ze współczynników
 jest różny od zera.
jest różny od zera.
Jeśli wszystkie współczynniki
 śą zerowe to filtr jest określany jako FIR
(Finite
Impulse
Response
= SOI
–Skończonej
Odpowiedzi
Impulsowej)
śą zerowe to filtr jest określany jako FIR
(Finite
Impulse
Response
= SOI
–Skończonej
Odpowiedzi
Impulsowej)
w przeciwnym wypadku IIR (Infinite Impulse response =NOI Nieskończonej Odpowiedzi Impulsowej)
Funkcja yulewalk służy do syntezy filtrów IIR a funkcja fir2 do syntezy filtrów FIR.
Definiowanie charakterystyki filtra
Charakterystyka częstotliwościowa
filtra cyfrowego zależy od częstotliwości próbkowania. W wielu
funkcjach MATLABa jest wymagane podanie częstotliwości w
jednostkach bezwymiarowych tzn. częstotliwości w Hz podzielonej
przez częstotliwość Nyquista (połowę częstotliwości
próbkowania). Czyli jeśli częstotliwość próbkowania wynosi 1000
Hz to częstotliwość 50 Hz odpowiada częstotliwości unormowanej

Aby zdefiniować charakterystykę projektowanego filtra, trzeba utworzyć dwa wektory określające częstotliwości (unormowanej) i odpowiadające im amplitudy.
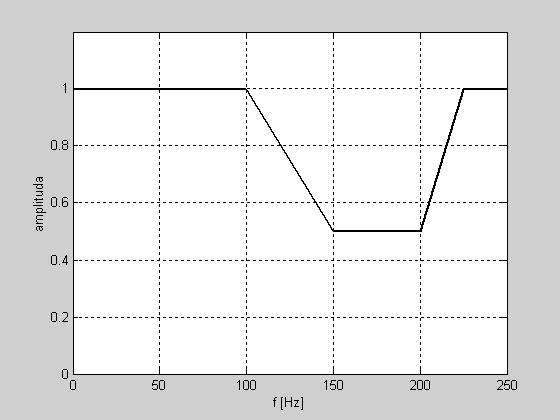
Przykład
Sygnał je próbkowany z częstotliwością 500 Hz.
|
Od Hz |
Do Hz |
amplituda |
|
0 |
100 |
Stała 1.0 |
|
100 |
150 |
Liniowo malejąca się od 1 do 0,5 |
|
150 |
200 |
Stała 0,5 |
|
200 |
225 |
Liniowo rosnąca od 0,5 do 1 |
|
225 |
250 |
Stała 1.0 |
Wprowadzamy założoną charakterystykę do MATLABa
fHz0=[0 100 150 200 225 250]
m0=[1 1 0.5 0.5 1 1]
plot(fHz0,m0);
fs=500; częstotliwość próbkowania
f0=fHz0/(fs/2); normalizacja
[bIIR,aIIR]=yulewalk(6,f0,m0); filtr 6 rzędu
bIIR =
0.7977 1.0451 1.1993 0.9520 0.7048 0.3119 0.1364
aIIR =
1.0000 1.0900 1.0755 0.9712 0.6448 0.2489 0.1171
Charakterystykę amplitudową i fazową otrzymanego filtra można wykreślić przy pomocy freqz
freqz(bIIR,aIIR,250)
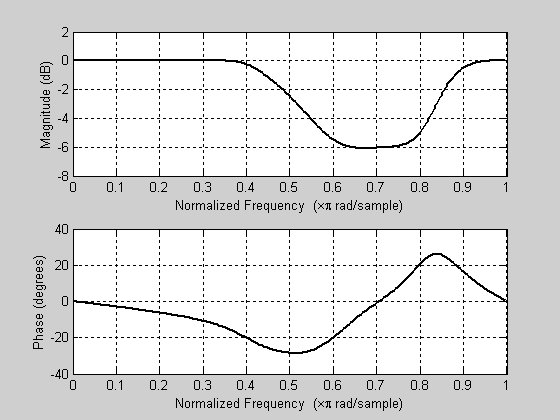
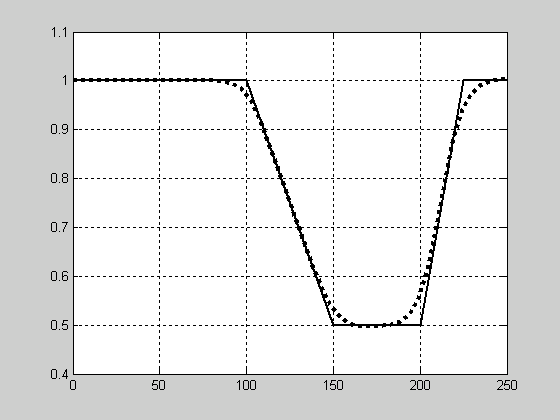
Charakterystykę amplitudową można porównać z założoną:
fHz1=linspace(0,250,50); oś x
om1=2*pi*fHz1; konwersja do rad/s
z=exp(sqrt(-1)*om1/fs);
mIIR=abs(polyval(bIIR,z)./polyval(aIIR,z));
plot(fHz0,m0,fHz1,mIIR);
Zadanie:
Opracował dr inż. Zbigniew Leonowicz na podstawie: A. Biran, M. Breiner: Matlab 5 for Engineers, Addison-Wesley, 1999, str. 567-600.
© Zakład Elektrotechniki Teoretycznej – Politechnika Wrocławska 2001
Wyszukiwarka
Podobne podstrony:
filtry cyfrowe
asb filtry cyfrowe 7
filtry cyfrowe id 171064 Nieznany
koszałka,teoria sygnałów, Filtry cyfrowe
filtry cyfrowe, CPS8, Ćwiczenie
filtry cyfrowe, Akademia Morska -materiały mechaniczne, szkoła, GRZES SZKOLA, szkoła, automaty, ayto
Wyklad Filtry cyfrowe1
filtry cyfrowe, CPS7, Ćw
filtry cyfrowe, porównanie charaktrystyk filtrów FIR, Marek Korejwo
filtry cyfrowe, CPS6, Ćwiczenie 6
filtry cyfrowe, transformacje analogowo-cyfrowe, Marek Korejwo
C3 C4 Filtry cyfrowe SOI i NOI
filtry cyfrowe, transf, Marek Korejwo
Wysylanie wiadomosci e mail Cyfrowe przetwarzanisygnalow Filtry, Cyfrowe przetwarzanisygnałów Filtry
cz05 filtry cyfrowe
Filtry cyfrowe teoria