Politechnika Wrocławska Instytut |
|
Wydział: elektryczny Rok: 2009/2010 Grupa: 3 Rok akad. : 2 |
|
||
Data ćw. : 03.03.2010
Nr ćwiczenia : 8 |
Temat: Bezpośrednie sterowanie cyfrowe
|
Ocena:
Podpis:
|
1. Wstęp teoretyczny
Regulator PID - w automatyce, regulator składający się z członu proporcjonalnego P o wzmocnieniu kp, całkującego I o czasie zdwojenia Ti oraz różniczkującego D o czasie wyprzedzenia Td. Jego celem jest utrzymanie wartości wyjściowej na określonym poziomie, zwanym wartością zadaną.
2. Cel i zakres ćwiczenia.
Poznanie algorytmicznej i sprzętowej struktury cyfrowych układów sterowania bezpośredniego.
Poznanie algorytmów sterowania cyfrowego na przykładzie cyfrowych regulatorów PID.
Praktyczne określenia nazw cyfrowych regulatorów PID oraz badanie ich właściwości na wybranych przykładach
3. Przyrządy pomiarowe.
Komputer z kartą A/C, C/A
4. Tabele i przykładowe obliczenia
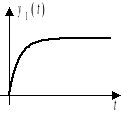
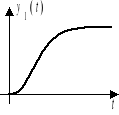
Parametry transmitancji obiektów I-go, II-go i III-rzędu.
1.
nastawy |
obiekt I rzędu |
k |
1 |
T |
1s |
|
|
okres próbkowania |
50ms |
okres obserwacji |
30s |
wartość skoku jednostkowego |
3.0 v |

nastawy |
obiekt II rzędu |
k |
1 |
T1 |
5s |
T2 |
1s |
okres próbkowania |
50ms |
okres obserwacji |
30s |
wartość skoku jednostkowego |
3.0 v |

nastawy |
obiekt II rzędu |
k |
1 |
T1 |
0.2s |
T2 |
5s |
T3 |
0.2s |
okres próbkowania |
50ms |
okres obserwacji |
30s |
wartość skoku jednostkowego |
3.0 v |
![]()
![]()
2.
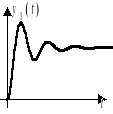
Obiekt III-rzędu w układzie zamkniętym
nastawy |
obiekt III rzędu |
Kp |
1 |
Ki |
0 |
Kd |
0 |
okres próbkowania |
60ms |
okres obserwacji |
36s |
wartość zadana [Un] |
3.0 V |
3.
P PI i PID
nastawy |
P |
PI |
PID |
okres próbkowania |
60ms |
60ms |
60ms |
okres obserwacji |
36s |
36s |
36s |
wartość zadana [Un] |
3.0 V |
3.0 V |
3.0 V |
Kp |
1.45 |
1.29 |
1,71 |
Ki |
0 |
0.0285 |
0,0633 |
Kd |
0 |
0 |
11,96 |
P
![]()
![]()
![]()
PI

![]()
![]()
PID

![]()
6.
Skok jednostkowy przy czasie próbkowania mniejszym o połowę
nastawy |
PID |
okres próbkowania |
60ms |
okres obserwacji |
18s |
wartość zadana [Un] |
3.0 V |
kp |
1,71 |
ki |
0,0633 |
kd |
11,96 |
5. Wnioski
Badania były wykonane poprawnie o czym świadczą dołączone wydruki.
Po dobraniu poprawnych parametrów regulatora PID możemy zauważyć zmniejszenie się oscylacji obiektu III rzędu.
1
Wyszukiwarka
Podobne podstrony:
Korekcja cyfrowa, sprawozdania PWR, podstawy automatyki
Metody i algorytmy sterowania cyfrowego spr2, Pwr, Metody i algorytmy sterowania cyfrowego, Metody p
Metody i algorytmy sterowania cyfrowego spr3, Pwr, Metody i algorytmy sterowania cyfrowego, Metody p
Metody i algorytmy sterowania cyfrowego spr1, Pwr, Metody i algorytmy sterowania cyfrowego, Metody p
automatyka sciaga na exam(1), Studia - Mechatronika PWR, Podstawy automatyki - wykład (Mirosław Łuko
T2 Naplocha, pwr, Podstawy automatyki - Wykład (Mikulczyński)
PA pytania, Studia - Mechatronika PWR, Podstawy automatyki - wykład (Mirosław Łukowicz)
R4 Uklady cyfrowe, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty laborka
nieodporny sprawozdanie, Pwr, Metody i algorytmy sterowania cyfrowego, sprawka
sprawozdanie na elektre 1, Automatyka i robotyka air pwr, II SEMESTR, Podstawy elektroniki
podstawy automatyki i robotyki PAiR sprawozdanie sala z sali 010 pwr IRB 1400
sprawozdanie automatyka 1, Studia, PWR, 2 semestr, Podstawy automatyki i robotyki
Sprawozdanie z laboratorium automatyki i robotyki, Studia, PWR, 2 semestr, Podstawy automatyki i rob
Ćw.2.Cyfrowy regulator PID, Elektrotechnika - notatki, sprawozdania, podstawy automatyki i regulacji
sprawozdanie filtr Noi, Pwr, Metody i algorytmy sterowania cyfrowego, sprawka
Symulacja układów sterowania z wykorzystaniem pakietu MATLAB, PWr W9 Energetyka stopień inż, III Sem
AUTOMATYKA 1A, PWr W9 Energetyka stopień inż, IV Semestr, Podstawy automatyki - laboratorium, Nasze
5D Stosowanie PLC do sterow(1), PWR [w9], W9, 3-4, Semestr bez wpisu, Podstawy automatyki, Laborator
nieodporny sprawozdanie, Pwr, Metody i algorytmy sterowania cyfrowego, sprawka
więcej podobnych podstron