MACIERZ SZTYWNOŚCI PŁASKIEGO ELEMENTU PROSTOKĄTNEGO
KROK 1. OKREŚLENIE TYPU ELEMENTU.
Zbudujemy macierz sztywności płaskiego elementu prostokątnego pokazanego na rys.1
Element ten o wymiarach podstawy 2a i wysokości 2b posiada 4 wierzchołki oznaczone jako: 1,2,3,4
Nieznane przemieszczenia wierzchołków są dane jako:
(1)
u1 - v4 są to parametry geometryczne, poziome i pionowe przemieszczenia węzłów.
KROK 2. OPIS POLA PRZEMIESZCZEŃ.
Parametry geometryczne (1) zostały zebrane w dwie macierze z elementami uszeregowanymi w kolejności odpowiadającej osiom x,y dla poszczególnych węzłów.
Opis pola przemieszczeń będzie wyrażony za pomocą składowych: u(x,y) v(x,y)
Funkcje przemieszczeń u i v elementu muszą być liniowe, ponieważ wzdłuż każdej krawędzi istnieją tylko dwa wierzchołki.
u(x, y) = a1 + a2x + a3y + a4xy (2)
v(x, y) = a5 + a6x + a7y + a8xy
Poszukiwana macierz sztywności ma wymiary 8x8 . Składowe pola przemieszczeń opisane są wielomianami liniowymi dwóch zmiennych . Z każdą ze składowych związane są 4 parametry węzłowe.
Niewiadome stałe a1, a2 do a6 wyrażamy przez geometryczne parametry węzłowe, rozwiązując dwa układy równań:
u1 = a1 + a2x1 + a3y1 + a4x1y1
u2 = a1 + a2x2 + a3y2 + a4x2y2 (3)
u3 = a1 + a2x3 + a3y3 + a4x3y3
u4 = a1 + a2x4 + a3y4 + a4x4y4
v1 = a1 + a2x1 + a3y1 + a4x1y1
v2 = a1 + a2x2 + a3y2 + a4x2y2
v3 = a1 + a2x3 + a3y3 + a4x3y3 (4)
v4 = a1 + a2x4 + a3y4 + a4x4y4
gdzie:
u1 = u(x1,y1), u2 = u(x2,y2), itd.
Po rozwiązaniu układów równań (3) i (4) i wstawieniu do równania (2) otrzymujemy:
u(x, y) = ![]()
[(b - x)(h - y)u1 + (b + x)(h - y)u2+ (b + x)(h + y)u3 + (b - x)(h + y)u4] (5)
ν(x, y) = ![]()
[(b - x)(h - y)v1 + (b + x)(h - y)ν2 + (b + x)(h + y)u3 + (b - x)(h + y) ν4]
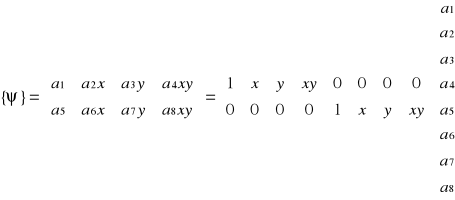
Dostrzegamy, że wyrażenia w (5) są przedstawione za pomocą funkcji kształtu oraz przemieszczeń wierzchołków:
{ψ} = [N]{d} (6)
gdzie:
d - wektor przemieszczenia wierzchołków
N - macierze funkcji kształtu :
N1 = ![]()
N2 = ![]()
(7)
N3 = ![]()
N4 = ![]()
Przykładowo: N1 = 1 dla wierzchołka 1 i N1 = 0 dla pozostałych wierzchołków.
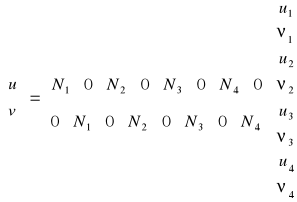
W formie rozszerzonej, równanie (6) ma postać:
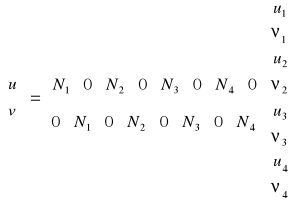
(8)
KROK 3. OPIS POLA ODKSZTAŁCEŃ.
Odkształcenia możemy wyrazić w nast. sposób:

(9)
Po podstawieniu równania (8) i do równania (9) oraz po wyliczeniu pochodnych
u i v, możemy wyrazić odkształcenia w nast. sposób:
{ε} = [B]{d} (10)
gdzie:
B - macierz przemieszczeń
d - wektor przemieszczenia wierzchołków
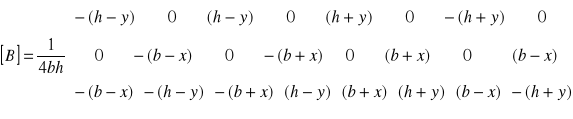
(11)
Z równań (9) i (10) wynika, że εx jest funkcją y ; ε y jest funkcją x, a γxy jest funkcją
x i y.
KROK4. OPIS POLA NAPRĘŻEŃ.
Pole naprężeń opisujemy:
(12)
gdzie:
D - macierz sztywności materiału
KROK5. RÓWNANIE MACIERZY SZTYWNOŚCI ELEMENTU.
Równanie to ma postać:
(13)
Poszukiwana macierz sztywności [k] dla elementu prostokątnego jest macierzą o wymiarach 8x8.
Uwzględnienie obciążeń międzywęzłowych , objętościowych i powierzchniowych wygląda następująco:
![]()
(14)
gdzie:
{X} - siły od obciążeń objętościowych
{T} - siły od obciążeń powierzchniowych
{P} - siły od obciążeń skupionych
[N] - prostokątna macierz funkcji kształtu z wzoru (8)
MACIERZ SZTYWNOŚCI DLA ELEMENTU IZOPARAMETRYCZNEGO.
Koncepcja elementu izoparametrycznego (elementu o konturach zakrzywionych) powstała na tle trudności występujących przy analizowaniu obszarów z brzegami zakrzywionymi. Uzyskanie dokładnych wyników przy użyciu elementów ograniczonych liniami prostymi wymagałoby użycia dużej liczby takich elementów. Główna trudność jaka występuje przy analizie elementów izoparametrycznych dotyczy opisu pola przemieszczeń i uzyskania macierzy sztywności. Trudności te zostały przezwyciężone dzięki możliwości odwzorowania skomplikowanego kształtu geometrycznego przez prostszy. Można zatem przeprowadzać wszystkie operacje na elemencie prostszym - macierzystym i przenosić wyniki na element izoparametryczny. Opisu geometrii i przemieszczeń elementu izoparametrycznego dokonujemy za pomocą tych samych funkcji i takiej samej liczby parametrów jak dla elementu prostego.
Rozważymy element tarczowy , prostokątny o 4 węzłach ( Rys.1 ). Jest to element 8 parametrowy. Parametrami są przemieszczenia węzłów.
KROK1. WYZNACZENIE POLA PRZEMIESZCZEŃ I FUNKCJI KSZTAŁTU.
Pole przemieszczeń opisane jest równaniem macierzowym:
(1)
Występujące we wzorze (1) funkcje kształtu mają jak wcześnie postać:
N1 = ![]()
N2 = ![]()
(2)
N3 = ![]()
N4 = ![]()
Funkcje te dla kwadratu pokazanego na Rys.1 wyrażają się następująco:
N1 = ![]()
N2 = ![]()
(3)
N3 = ![]()
N4 = ![]()
Potraktujemy ten kwadrat jako element macierzysty i powiążemy jego geometrie z geometrią dowolnego czworokąta pokazanego na Rys.2
Boki czworokąta są liniami prostymi więc współrzędne x, y będą zależały liniowo od współrzędnych s, t
Współrzędne x, y określamy wzorami:
x = a1 + a2s + a3t + a4st (4)
y = a5 + a6s + a7t + a8st
Chcąc otrzymać niewiadome stałe a1, a2 do a8 postępujemy jak w przypadku elementu prostokątnego i otrzymujemy:
x = ![]()
[(1 - s)(1 - t)x1 + (1 + s)(1 - t)x2+ (1 + s)(1 + t)x3 + (1 - s)(1 + t)x4] (5)
y = ![]()
[(1 - s)(1 - t)y1 + (1 + s)(1 - t)y2 + (1 + s)(1 + t)y3 + (1 - s)(1 + t) y4]
lub zapisując w formie macierzy:
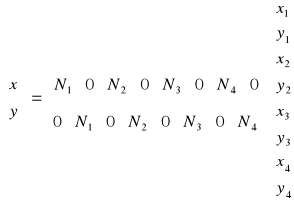
(6)
Z powyższego widać, że funkcje Ni (3) przekształcają kwadrat (Rys. 1) w układzie s, t w dowolny czworokąt opisany współrzędnymi x1, y1,..... w układzie x, y .
Porównanie (1) oraz (6) wykazuje, że pole przemieszczeń i geometria opisane są tymi samymi funkcjami i taką samą liczbą parametrów.
Zauważyć można również, że funkcje kształtu w równaniu (3) są po raz kolejny takie, że N1 do N4 jest równe 1 na danym wierzchołku oraz równe zeru na wszystkich innych wierzchołkach.
Dla przykładu, N1 przedstawia geometryczny kształt dla x1 = 1, y1 = 1 a x2, y2, x3, y3, x4, oraz y4 wszystkie równe zero.
![]()
(i= 1,2....,n)
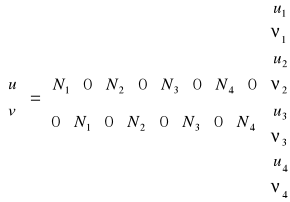
KROK 2: Ustalenie funkcji przemieszczenia
Funkcje przemieszczania w elemencie są podobnie definiowane przez te same funkcje kształtu jakie używane są do określania kształtu elementu, to jest:
(7)
gdzie u i v są przemieszczeniami równoległymi do głównych współrzędnych x i y, a funkcje kształtu są określone przez równania (3).
Porównując równania (1) i (7), widzimy podobieństwa pomiędzy prostokątnym elementem z bokami o długościach 2b i 2h (rys. 1) oraz kwadratowy element z bokami o długości 2. Jeżeli b = l i h = l, dwa równania funkcji kształtu czyli równania (2) i (3), będą identyczne.
KROK 3: Zdefiniować związki odkształcenia/przemieszczenia oraz naprężenia/odkształcenia.
Aby sformułować element macierzy [B] przedstawiono funkcje kształtu we współrzędnych izoparametrycznych s i t, ponieważ wyrażenie funkcji kształtu we współrzędnych x i y było by niemożliwe.
Aby skonstruować element macierzy sztywności, musimy ustalić odkształcenia, które są zdefiniowane jako przemieszczenia opisane przez współrzędne x i y. Przemieszczenia powinny być opisane jako funkcje współrzędnych s i t, jak podano w równaniu (7), razem z funkcjami kształtu określonymi przez równania (3). Możemy wcześniej określić(![]()
f/![]()
x) i (![]()
f/![]()
y), gdzie, f jest funkcją reprezentującą funkcje przemieszczeń u lub v. Jakkolwiek u i v są teraz wyrażane w jednostkach s i t. W tym celu musimy skorzystać z reguły zbioru uporządkowanego liniowo ponieważ nie będzie możliwe bezpośrednie wyrażenie s i t jako funkcji x i y. Funkcję f można wyrazić w następujący sposób:
![]()
(8)
![]()
W równaniach (8), dane są (![]()
f/![]()
s), (![]()
f/![]()
t), (![]()
x/![]()
s), (![]()
y/![]()
s) (![]()
x/![]()
t), i (![]()
y/![]()
t) uzyskane z równań (7) i (4). Natomiast poszukujemy (![]()
f/![]()
x) i (![]()
f/![]()
y). Odkształcenia mogą być wyznaczone jako εx = (![]()
u/![]()
x). W tym celu, rozwiązujemy równania (8) dla (![]()
f/![]()
x) i (![]()
f/![]()
y) korzystając z reguły Cramer-a która dotyczy oszacowania wartości:


(9)
gdzie wyznacznikiem w mianowniku jest wyznacznik Jacobian-a macierzy J. Hence, macierz Jacobian-a jest podana jako:
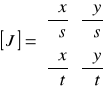
(10)
Możemy teraz wyrazić odkształcenia elementu jako:
ε = B d (11)
gdzie B musi być teraz wyrażone jako funkcja s i t. Możemy pokazać, że zachodzi związek pomiędzy odkształceniami a przemieszczeniami podanymi w macierzy:

(12)
gdzie macierz prostokątna po prawej stronie równania (12) jest operatorem macierzy to jest, ![]()
( )/![]()
x i ![]()
( )/![]()
y przedstawiają pochodne cząstkowe zmiennej, którą można umieścić w środku nawiasów. Używając równania (9), mamy:
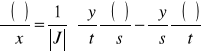
![]()
(13)
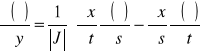
![]()
gdzie ![]()
jest wyznacznikiem J. Używając równania (13) w równaniu (12) otrzymujemy odkształcenia wyrażone we współrzędnych (s-t) jako:
![]()
= 
(14)
Używając równania (7), możemy przedstawić równanie (14) jako funkcje kształtu i ogólne współrzędne formy macierzy:
![]()
(15)
gdzie D jest operatorem macierzy podanej jako:
![]()
(16)
N jest funkcją macierzy kształtu 2 x 8, podanej jako pierwsza macierz po prawej stronie równania (7) a d jest kolumną macierzy po prawej stronie równania (7).
Definiując B jako:
(17)
mamy B wyrażone jako funkcję s i t
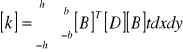
KROK4. Wyprowadzanie równania macierzy sztywności.
Chcemy teraz przedstawić macierz sztywności we współrzędnych s i t. Dla stałej grubości elementu mamy:
[k] =![]()
[B]T[D][B]tdxdy (18)
B jest funkcją s i t, więc musimy [k] całkować po s i t. Po raz kolejny, aby przekształcić zmienne i obszar z x i y na s i t, musimy przeprowadzić standardową procedurę, która zawiera wyznacznik J. Ten główny typ przekształceń podano w następujący sposób:
![]()
(19)
gdzie należy podstawić |J| w prawej stronie równania (19), co wynika z twierdzenia
o rachunku całkowym. Podstawiając równanie (19) do równania (18), otrzymujemy:
![]()
(20)
Wyznacznik |J| jest wielomianem we współrzędnych s i t. Jakkolwiek używając równania (10) dla [J] i równania (3) dla x i y, możemy określić |J| jako:
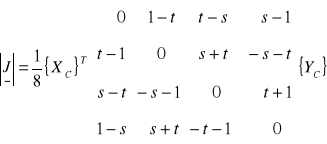
(21)
gdzie:
![]()
(22)
oraz:

(23)
Zauważmy, że |J| jest funkcją s i t i znanymi głównymi współrzędnymi x1, x2, …, y4
Dokładniej można wyrazić B przez zastąpienie równania (16) dla D' i równań (5) dla funkcji kształtu w równaniu (17). Otrzymujemy wtedy mnożenie macierzy przez odwrotność wyznacznika J:
(24)
gdzie podmatryce B są podane przez:
(25)
gdzie i jest równy 1, 2, 3, i 4 wiec otrzymujemy:
![]()
![]()
(26)
![]()
![]()
Używając funkcji kształtu zdefiniowanych przez równania (5) otrzymujemy:
![]()
![]()
(27)
Od tego momentu, B jest funkcją s i t w liczniku i mianowniku (przez |J| dane przez równanie (21)) o znanych głównych współrzędnych x1 do y4. Również |J| i B są takie, jak wynik skomplikowanych wyrażeń w równaniu (20), więc całkując można wyznaczyć element macierzy sztywności. Element bryły macierzy będzie teraz określany jako:
(28)
a powierzchnia macierzy, załóżmy, wzdłuż krawędzi t=1 (zobacz rys. 2) z całkowitą długością L, jest wyrażona:
(29)
lub:
(30)
Od tej chwili N1 = 0 i N2=0 wzdłuż krawędzi t=1, również żadne siły węzłowe nie istnieją w węzłach 1 i 2.
Rys.1
Rys.2
Wyszukiwarka
Podobne podstrony:
Macierz sztywności
PP2 WM2c, Agregacja macierzy sztywności układu
Charakterystyki sztywnosciowe elementow podatnych sprezyny
życie wyrazów - zmiany barwy uczuciowej oraz znaczenia - REFERAT, filologia polska, językoznawstwo,
Macierz sztywności
macierz sztywnosci
Algorytm wymiarowania zbrojenia według metody ogólnej w zginanym elemencie prostokątnym
Algorytm wymiarowania zbrojenia według metody uproszczonej w zginanym elemencie prostokątnymx
Elementy prostownicze
Zabawy i ćwiczenia z elementami równowagi oraz z elementami rzutu i?lowania w grupie przedszkolnej
Algorytm wymiarowania zbrojenia według metody ogólnej w zginanym elemencie prostokątnym wykonanym z
Macierz sztywności
transformacja macierzy sztywności
ELEMENTY SUPRASEGMENTALNE ORAZ SEGMENTALNE JĘZYKA
Elementy prostownicze
macierz sztywności
T6 Elementy równoległe i prostopadłe
więcej podobnych podstron