Piotr Jędrzejczyk
numer albumu: 135605
kierunek: AiR
wydz.: Mechaniczny
Temat: Lewitron - lewitacja magnetyczna.
Przedmiot: Teoria sterowania
Wstęp:
Zjawisko lewitacji magnetycznej polega na unoszeniu się metalowego przedmiotu w powietrzu. Unosi się on dzięki działaniu na niego niewidzialnej dla ludzkiego oka siły wywołanej przez pole elektromagnetyczne. Unoszący się przedmiot nie jest, zatem związany mechanicznie z innym układem. Ogólna zasada działania jest jednak prosta i można ją opisać, nie wykorzystując do tego nawet matematyki, wystarczy znajomość fizyki z zakresu szkoły średniej.
Rysunek 1
Na rysunku 1 jest przedstawiony schematycznie układ z elektromagnesem i kulką wykonaną np. ze stali. Oczywiście nie musi to być kulka, można wykorzystać dowolny inny przedmiot wykonany z tego materiału. Na rysunku zaznaczyłem siły działające na kulkę. Działają dwie siły: elektromagnetyczna oznaczona jako Fe, którą wytwarza elektromagnes, oraz siła grawitacji oznaczona jako Fg. Żeby kulka mogła wisieć swobodnie w powietrzu, wymagane jest, żeby siły Fe i Fg były równe, ale przeciwnie skierowane. Istnieje, zatem punkt w przestrzeni, w którym te siły się równoważą, a jego położenie zależy od siły Fe oraz od masy kulki. Choć znajdziemy ten punkt i umieścimy w nim kulkę, jej lewitacja jest niemożliwa, ponieważ nawet najmniejsze zakłócenie jej pozycji spowoduje spadek kulki albo przyciągnięcie przez elektromagnes. Można jednak na bieżąco badać położenie kulki i regulować siłę przyciągania elektromagnesu. Jak wiadomo, siła elektromagnesu zależy od prądu przepływającego przez jego uzwojenie. Wystarczy, więc opracować układ czujnika badającego położenie oraz szybkość zmian położenia lewitującego przedmiotu i odpowiedni sterownik elektromagnesu.
Opis układu:
Lewitację magnetyczną można zrealizować na kilka różnych sposobów. Najlepsze efekty wizualne uzyskalibyśmy, stosując elektromagnes z nadprzewodnika. My możemy sięgnąć po o wiele prostszy sposób stworzenia systemu lewitacji magnetycznej. Systemu, w którym odpowiedni czujnik śledzi położenie obiektu lewitującego w polu magnetycznym elektromagnesu. W naszym projekcie rolę czujnika odgrywa bariera podczerwieni, monitorująca aktualne położenie kulki. Schemat blokowy urządzenia znajduje się na poniżej.
Układ wykorzystuje dwa czujniki podczerwieni, którymi są fototranzystory. Pierwszy z nich tworzy, wraz z diodą nadawczą IRED, prostą barierę śledzącą położenie kulki. Drugi bada poziom oświetlenia zewnętrznego, co jest konieczne, gdyż wokół nas znajduje się wiele źródeł promieniowania podczerwonego (np. słońce, żarówki itp.) zakłócające pracę bariery. W sytuacji, gdy dioda nadawcza bariery jest wyłączona (lub zasłonięta), na wejściach wzmacniacza różnicowego (komparatora) występują takie same napięcia, czyli wzmocnienie jest równe zeru. Układ po prostu nie reaguje na oświetlenie z zewnątrz. Dopiero różnica napięć spowodowana oświetleniem czujnika bariery powoduje pojawienie się napięcia różnicy na wyjściu wzmacniacza.
Taki prosty sposób jest bardzo skuteczny w eliminacji zakłóceń. Nie ma konieczności stosowania uciążliwych filtrów czy modulacji światła diody IRED. Na dodatek bez problemu w barierze można zastosować zwykłą diodę LED. Na schemacie ideowym z rysunku 2 dioda D1 wraz z fototranzystorem T2 tworzą barierę podczerwieni. W obwodzie diody nadawczej znajduje się dodatkowy potencjometr PR1 służący do regulacji intensywności świecenia, co może wydawać się nieco dziwne, ponieważ moc tracona w rezystorze R1 jest znaczna. Przy uruchamianiu całego systemu taka możliwość regulacji okazuje się jednak zbawienna ze względu na zmienne warunki oświetlenia zewnętrznego. W emiterze T1 także umieszczono dodatkowy potencjometr PR1, dzięki któremu położenie, a co za tym idzie poziom oświetlenia T1 nie jest tak krytyczne, bo w każdej chwili możemy wyregulować jego czułość. Tranzystory te podłączone są do wtórników operacyjnych U1A, U1B (US1), które zapewniają odpowiednie dopasowanie. Kolejny stopień (U2A) to najzwyklejszy wzmacniacz różnicowy o wzmocnieniu równym stosunkowi R7/R4. Sygnał z bariery został podany na wejście nieodwracające U2A, by działanie układu było bardziej oczywiste (gdy odsłaniamy barierę, to napięcie rośnie i odwrotnie, gdy zasłaniamy - to maleje). Na wyjściu U2A znajduje się filtr, od którego zależy stabilność naszego układu. Bada on aktualne położenie i prędkość kulki. Poprzez dobór wartości rezystancji R8 i R9 oraz pojemności C1 możemy zmieniać przepustowość filtru, a co za tym idzie wzmocnienie i tłumienie danej częstotliwości. Dzięki temu, gdy kulka wpada w drgania, są one natychmiast gaszone szybką reakcją C1. Dobór wartości tych elementów zależy przede wszystkim od częstotliwości drgań i może być wyliczony lub dobrany eksperymentalnie. Jako że jest to układ pasywny sygnał na wyjściu zostaje zredukowany [G=R9/(R9+R8)=0,5], więc trafia następnie do U2B, gdzie zostaje wzmocniony i bez problemu steruje bramką MOSFET−a mocy T8.
Bezpośrednio do drenu przyłączona jest cewka elektromagnesu zabezpieczona przed przepięciami diodą D2.
Nie zostało omówione jeszcze ograniczenie prądowe, które w zasadzie nie jest konieczne. Wyobraźmy sobie jednak sytuację, kiedy zostawiamy uruchomiony system np. na cały dzień. Kulka zachowuje się stabilnie, ale co będzie, gdy jednak spadnie? Otóż z zasilacza pobierany będzie ogromny prąd, a cewka niepotrzebnie zacznie się nagrzewać. Z pomocą przychodzi nieodzowne, jak się okazuje, ograniczenie. W układzie wykorzystano możliwość ciągłej obserwacji wartości napięcia na R17 przez T5. Rezystor ten ma wartość ok. 1Ω/10W, więc spadek napięcia na nim jest równy co do aktualnej wartości prądu płynącego przez cewkę elektromagnesu. Za pomocą R18 i PR3 możemy ustalać próg zadziałania zabezpieczenia, które dzięki C2 działa z pewnym opóźnieniem zależnym od pojemności tego kondensatora. Gdy napięcie na R17 osiągnie żądaną przez nas wartość, C2 zacznie się ładować, otwierając następnie T8. Przerzutnik bistabilny (T3,T4) zmieni swój stan na wyjściu, zwierając bazę T6 do masy, T7 zostanie zatkany, a przez cewkę przestanie płynąć prąd dopóki nie przyciśniemy S1. Układ ograniczenia prądowego przy takich wartościach elementy, jakie zastosowano w układzie, daje się regulować do max ok. 1,5A. Po przekroczeniu tej wartości kulka po prostu spada. Gdy chcemy „wycisnąć” większy prąd, należy po prostu wyłączyć ograniczenie za pomocą zworki umieszczonej na płytce. Dodatkowo znajduje się tam przycisk S2 do wygodnego wyłączania cewki.
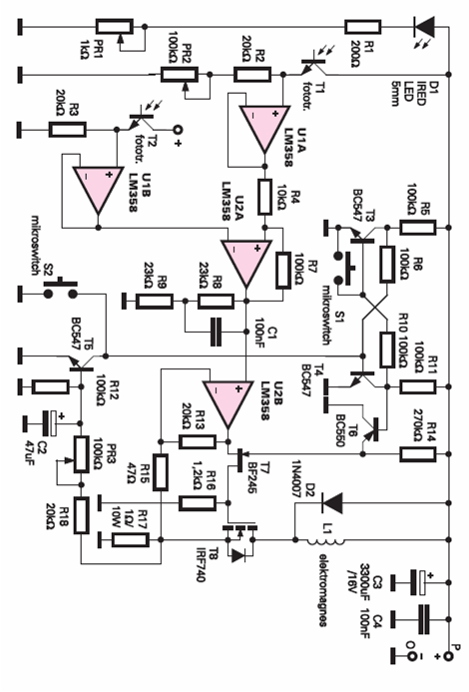
Rysunek 2
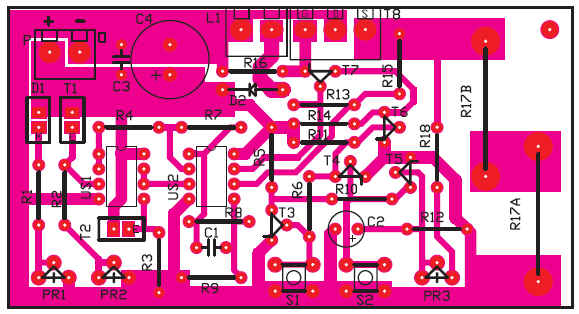
Płytka drukowana
UWAGI:
Na płytce drukowanej oraz schemacie układu wkradło się kilka drobnych, lecz istotnych błędów:
- Dioda D2 została narysowana odwrotnie na schemacie ideowym,
- Zabrakło połączenia dzielnika R8, R9 z wejściem nieodwracającym U2B (n.5) zamiast wyjścia U2A (n.1)
- Cewka L1 powinna być zasilana z „plusa”, a nie z „minusa”. Żeby ułatwić prowadzenie ścieżek na PCB zamieniono miejscami punkty G i D.
MODYFIKACJE:
- Dzielnik napięcia R8, R9 zastąpiono potencjometrami o wartości 44kΩ w celu uzyskania płynnej regulacji wzmocnienia.
- Kondensator C1 w układzie filtra wyprowadzono na listwę łączeniową umożliwiając w ten sposób łatwą jego wymianę dla potrzeb badawczych.
Opis matematyczny pracy elektromagnesu:
Mechaniczna charakterystyka statyczna elektromagnesu, podająca zależność siły F przyciągania zwory w funkcji jej odległości s od rdzenia magnetowodu (przy stałym zasilaniu) jest w ogólnym przypadku funkcją hiperboliczną drugiego stopnia:
(1)
Oznaczenia: k - oznacza charakterystyczny współczynnik proporcjonalności w Nm2, stały dla danego elektromagnesu i ustalonego prądu jego zasilania , s - szczelinę w magnetowodzie w m.
Siła przyciągania zwory zależy od stanu elektromagnesu określonego wartościami chwilowymi: prądu i w uzwojeniu, strumienia skojarzonego z tym uzwojeniem oraz wartości szczeliny s między zworą a rdzeniem elektromagnesu.
Jednoznaczny opis właściwości elektromagnesu jako elektromechanicznego przetwornika energii umożliwia rodzina jego charakterystyk (i,s). Charakterystyki te można wyznaczyć najprościej doświadczalnie przez pomiar i rejestrację przebiegów czasowych napięcia zasilającego u(t) oraz prądu i(t) dla kolejnych wartości szczeliny s=const. wg [1], a następnie przez obliczenie strumienia z zależności:
(2)
czyli
(3)
Oznaczenia: R - oznacza rezystancję zastępczą widzianą przez źródło zasilające, t - czas.
Ten sposób postępowania prowadzi do wyznaczenia rodziny charakterystyk magnesowania magnetowodu elektromagnesu (rdzenia, zwory i dwu szczelin) - każda charakterystyka dla innej, stałej wartości szczeliny.
Korzystanie z zależności (3) może spowodować dość znaczne rozbieżności między wartościami obliczonymi i rzeczywistymi strumienia, zwłaszcza w przypadku elektromagnesów szybkiego działania. Wynika to ze zmienności rezystancji R w trakcie zmian prądu, gdyż na jej wartość ma wpływ nie tylko rezystancja cewki (można w przybliżeniu przyjmować, że jest stała), ale także rezystancja reprezentująca straty po stronie elektromagnesu.
Mając na uwadze powyższe spostrzeżenia, w pracy [6] zaproponowano inny sposób wyznaczenia charakterystyk magnesowania. Sposób ten wykorzystuje pomiar napięcia indukowanego w dodatkowo nawiniętej cewce elektromagnesu. Napięcie indukowane w wyniku zmian w czasie strumienia sprzężonego opisuje wzór
(4)
Znając wartość napięcia indukowanego ui (t) można wyznaczyć strumień
(5)
W celu pomiaru napięcia indukowanego ui(t) nawija się na karkasie elektromagnesu drugie uzwojenie - pomiarowe. Uzwojenie to nawinięte równolegle z uzwojeniem roboczym prowadzi się cienkim drutem w wolnych przestrzeniach stykających się zwojów drutu tworzących uzwojenie robocze. W ten sposób z obydwiema cewkami sprzęga się taki sam strumień.
Praca elektromagnesu możliwa jest dzięki przemianom energetycznym zachodzącym w nim. Pobierana energia elektryczna We zostaje zamieniona w części na pracę Wm wykonaną przez obwód magnetyczny. Opisane wzorem (2) równanie napięć można pomnożyć stronami przez wyrażenie i(t)dt otrzymując
(6)
Po scałkowaniu
(7)
Lewa strona równania (7) wyraża całkowitą wartość energii We pobranej ze źródła zasilania, wyrażenie
(8)
opisuje energię WR zamienioną w tym czasie na ciepło, zaś
(9)
przedstawia część pobranej energii elektrycznej, przetworzoną na energię mechaniczną Wm i energię pola magnetycznego WL, zakumulowaną w obwodzie magnetycznym (por. część pierwsza artykułu). Obie te energie ilustruje poniższa charakterystyka.
Charakterystyki magnesowania obwodu magnetycznego podczas ruchu zwory: sp - szczelina początkowa, sk - szczelina końcowa, A - punkt początku ruchu zwory, B - koniec ruchu roboczego, C - ustalona wartość prądu przy zasilaniu znacznie dłużej niż do końca ruchu zwory, D - strumień w chwili końca ruchu, E - wartość maksymalna strumienia skojarzonego, Wm - praca mechaniczna wykonana przez magnetowód, WL - energia pola magnetycznego zakumulowanego w magnetowidzie
Analityczny opis sprawności przetwarzania energii przez elektromagnes Określenie wpływu napięcia zasilania na przebieg procesu przetwarzania energii elektrycznej na mechaniczną i jego sprawność jest możliwe w praktyce tylko na drodze doświadczalnej. Rozważania teoretyczne wymagałyby, bowiem uprzedniego ogólnego rozwiązania układu trzech równań różniczkowych (3), (4), (5) - opisujących działanie układu elektromechanicznego z elektromagnesem prądu stałego:
równania napięć w obwodzie elektrycznym
równania ruchu mechanizmu napędzanego przez elektromagnes
równania opisującego działanie elektromagnesu
Oznaczenia:
U - stałe napięcie zasilania, i = i(t) - wartość chwilowa natężenia prądu, R - rezystancja obwodu wzbudzania, Ψ = Ψ(t) - wartość chwilowa strumienia magnetycznego skojarzonego ze wszystkimi zwojami, α = α(t) - przemieszczenie kątowe zwory, t - czas, J - masowy moment bezwładności poruszających się elementów zredukowany do osi obrotu zwory, k1 - współczynnik tarcia lepkiego, k2 - współczynnik sztywności sprężyny powrotnej, M0 - moment napięcia wstępnego sprężyny powrotnej, Mµ - moment tarcia suchego, Mdyn - wartość chwilowa momentu napędowego wytwarzanego przez elektromagnes, l - ramię działania siły przyciągania zwory.
Rozwiązanie tego układu, lub podobnego, analogicznie zbudowanego w przypadku liniowego ruchu zwory, jest możliwe tylko metodami numerycznymi, po uzyskaniu na drodze doświadczalnej rodziny statycznych charakterystyk magnesowania obwodu magnetycznego Ψ(α,i), przy różnych wartościach szczelin w magnetowodzie. Na drodze doświadczalnej wyznaczyć też trzeba współczynniki k1 oraz k2, wartości momentu M0 oraz Mµ, wartość rezystancji R. Rozwiązanie ogólne układu równań wydaje się być niemożliwe przy obecnym stanie wiedzy.
Metodami numerycznymi uzyskać można wyniki w postaci czasu rozruchu, czasu ruchu roboczego i przebiegu prędkości zwory. Otrzymane rozwiązanie układu równań dotyczy określonego przypadku szczególnego i nie podlega uogólnieniom. Głównymi powodami są indywidualne statyczne charakterystyki magnesowania magnetowodu, różne dla każdego elektromagnesu oraz bardzo zawikłane zjawiska przetwarzania energii elektrycznej na mechaniczną, zachodzące w elektromagnesie, a także trudne do uwzględnienia w opisie różnorodne straty energii za poziomie elektromagnesu i napędzanego mechanizmu [3]. Analizę komplikuje też stopniowe nasycanie się magnetowodu pod wpływem narastania prądu, oddziaływania zwrotne poruszającej się zwory powodujące indukowanie w uzwojeniu siły elektromotorycznej przeciwdziałającej narastaniu prądu oraz ciągła podczas ruchu zmiana stałej czasowej T obwodu zasilania skutkiem zmiany położenia zwory. Tak więc "stała czasowa" opisywana zależnością T=L/R (gdzie L jest indukcyjnością uzwojenia, zaś R rezystancją obwodu zasilania) nie jest stałą, gdyż indukcyjność uzwojenia rośnie od początku do końca ruchu zwory.
Sprawność przetwarzania przez elektromagnes energii elektrycznej na mechaniczną można wyrazić prostym wzorem jako iloraz wyjściowej energii mechanicznej (pracy elektromagnesu) do wejściowej energii elektrycznej pobranej ze źródła zasilania, obliczony dla chwili zakończenia ruchu zwory. Sposób taki nazywany bywa w przenośni "fotografią energii w chwili zakończenia ruchu" [3].
Oznaczenia:
η - sprawności układu elektromechanicznego, Wm - praca mechaniczna wykonana przez zworę elektromagnesu, We - energia elektryczna pobrana ze źródła zasilania, Mdyn(α) - wartość chwilowa momentu napędowego wytwarzanego przez elektromagnes w funkcji szczeliny w magnetowodzie, α - szczelina w magnetowodzie, αmax - skok zwory, tz - czas wzbudzania (zasilania uzwojeń) elektromagnesu, u(t) oraz i(t) - chwilowe wartości napięcia oraz natężenia prądu wzbudzania. Obliczona w taki sposób sprawność jest wskaźnikiem stopnia wykorzystania energii i może służyć celom porównawczym.
Parametry konstrukcyjne elektromagnesu:
Średnia długość zwoju elektromagnesu:
![]()
,
Liczba zwojów elektromagnesu:
![]()
,
Znamionowy prąd płynący przez uzwojenie elektromagnesu:
![]()
,
Rezystancja uzwojenia elektromagnesu:
![]()
,
Długość drutu uzwojenia elektromagnesu:
![]()
,
Pole przekroju drutu elektromagnesu:
![]()
,
Średnica drutu uzwojenia elektromagnesu:
![]()
,
Indukcyjność cewki elektromagnesu:
![]()
,
Moc tracona w uzwojeniu elektromagnesu:
![]()
,
Objętość rdzenia elektromagnesu:
![]()
,
Ciężar rdzenia elektromagnesu:
![]()
,
Materiały:
- Artykuł z miesięcznika „Elektronika dla wszystkich” - Lewitron1 autor Piotr Wojtowicz
- Artykuł z miesięcznika „Elektronika dla wszystkich” - Lewitron2 autor Patryk Ziewiec
- Artykuł „Elektromagnesy prądu stałego” część II - autor dr inż. Witold Jaszczuk
- Artykuł „Elektromagnesy prądu stałego” część III - autor dr inż. Witold Jaszczuk
- Forum internetowe www.elektroda.pl
Wyszukiwarka
Podobne podstrony:
układy kombinacyjne, Politechnika Lubelska, Studia, semestr 5, Sem V, Sprawozdania, Elektryczny, Teo
czarodziej, Edukacja, studia, Semestr VI, Teoria Sterowania
Teoria sterowania 9, Politechnika Lubelska, Studia, semestr 5, Sem V, Nowy folder
04, Politechnika Lubelska, Studia, semestr 5, Sem V, Sprawozdania, sprawozdania, Sprawozdania, spraw
Regulacja impulsowa, Politechnika Lubelska, Studia, semestr 5, Sem V, Sprawozdania, Elektryczny, TEO
Ściąga-Teoria sterowania, Politechnika Lubelska, Studia, Studia, sem VI, z ksero na wydziale elektry
logo sasal, Politechnika Lubelska, Studia, semestr 5, Sem V, Sprawozdania, Elektryczny, Teoria stero
teoria sterowania, Edukacja, studia, Semestr VI, Teoria Sterowania
TS - projekt, Edukacja, studia, Semestr VI, Teoria Sterowania, Projekt
Auto-2~1, Politechnika Lubelska, Studia, semestr 5, Sem V, Sprawozdania, sprawozdania, Sprawozdania,
Teoria sterowania
1236488004215 Teoria Sterowania Mechatronika zagadnieniaid 13981
KLASA SZKOLNA, Pedagogika, STUDIA, teoria kształcenia
Teoria sterowania 1 2
Teoria sterowania wykład 3 (14 03 2003)
Teoria sterowania wykład 4 (21 03 2003)
więcej podobnych podstron