skanuj0033
4.6. WYWAŻANIE MASZYN I MECHANIZMÓW 189

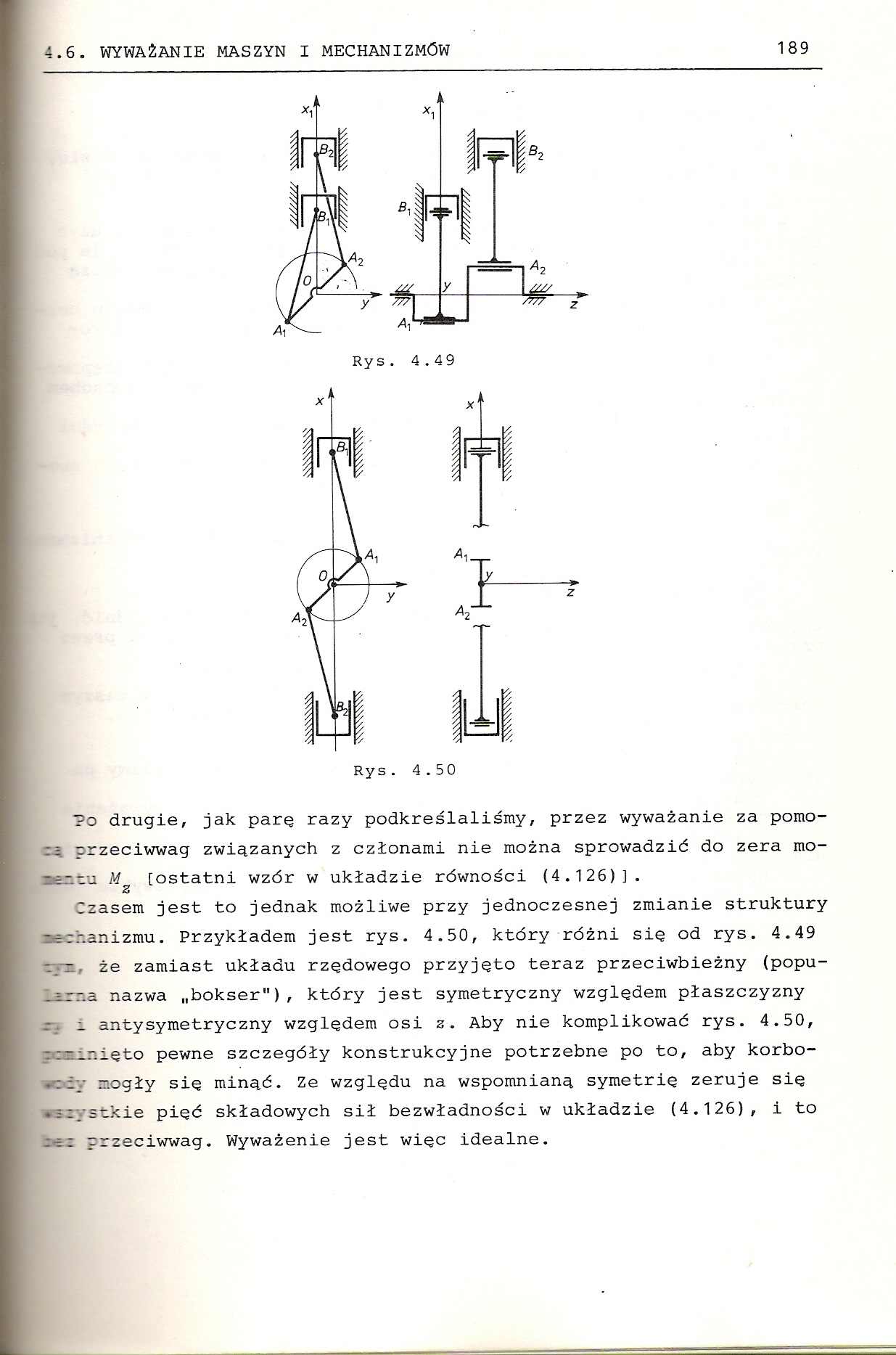
Rys. 4.49
Po drugie, jak parę razy podkreślaliśmy, przez wyważanie za pomo-
=.=; przeciwwag związanych z członami nie można sprowadzić do zera mo-
cer.tu M [ostatni wzór w układzie równości (4.126)]. z
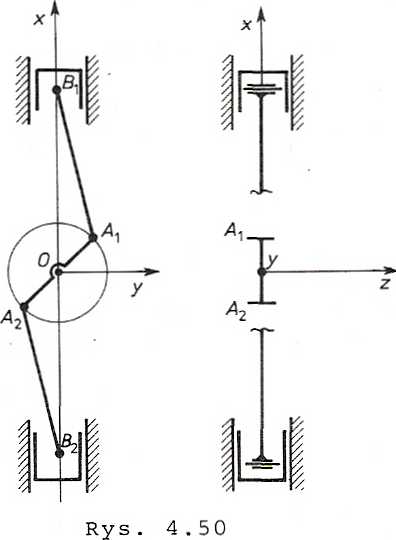
Czasem jest to jednak możliwe przy jednoczesnej zmianie struktury mechanizmu. Przykładem jest rys. 4.50, który różni się od rys. 4.49 tym, że zamiast układu rzędowego przyjęto teraz przeciwbieżny (popularna nazwa „bokser"), który jest symetryczny względem płaszczyzny rs i antysymetryczny względem osi z. Aby nie komplikować rys. 4.50, ęoninięto pewne szczegóły konstrukcyjne potrzebne po to, aby korbo-woćj mogły się minąć. Ze względu na wspomnianą symetrię zeruje się sszystkie pięć składowych sił bezwładności w układzie (4.126), i to c«=c przeciwwag. Wyważenie jest więc idealne.
Wyszukiwarka
Podobne podstrony:
skanuj0027 WYWAŻANIE MASZYN I MECHANIZMÓW 183 Jeśli człon l wchodzi w parą obrotową z podstawą, to d
skanuj0021 4.6. WYWAŻANIE MASZYN I MECHANIZMÓW 177 1, ..., 6) i zakreskowano półpłaszczyzny, w który
skanuj0023 4.6. WYWAŻANIE MASZYN I MECHANIZMÓW 179 ci dają się sprowadzić do siły wypadkowej leżącej
skanuj0031 4.6. WYWAŻANIE MASZYN I MECHANIZMÓW 187 Łącznie więc w punkcie B jest skupiona masa M = M
53753 skanuj0019 (30) WYWAŻANIE MASZYN I MECHANIZMÓW 171 Ix a-, (rys. 4.42). Kołnierz po prawej stro
58679 skanuj0029 (14) 4.6. WYWAŻANIE MASZYN I MECHANIZMÓW 185 2. Schemat rys. 4.46
skanuj0013 (41) 4.6. WYWAŻANIE MASZYN I MECHANIZMÓW 169 m£ = " mr$ (4.113) oz
skanuj0025 (20) 4 -1. WYWAŻANIE MASZYN I MECHANIZMÓW 181 dx . dzx . I m . ■ = o. E m . *
skanuj0011 (55) 4.6., WYWAŻANIE MASZYN I MECHANIZMÓW 167 4.6.;1. Wyważanie mas w ruchu obrotowym wok
20664 skanuj0015 (35) 4.6. WYWAŻANIE MASZYN I MECHANIZMÓW 171 m^v 1 cos + OTjj2?2 cos a2 = 0, m-
więcej podobnych podstron