skanuj0027

WYWAŻANIE MASZYN I MECHANIZMÓW 183
Jeśli człon l wchodzi w parą obrotową z podstawą, to dołączając zrzeciwwagę do członu l, można od razu wyrównoważyć statycznie masą
. Może być jednak wygodniejsze postąpić jak w poprzednim przypad-
Krok trzeci. Obecnie mechanizm jest już wyrównoważony srarycznie. Może sią zdarzyć, że w toku poprzedniego postępowania przyczepiono do niektórych członów po kilka mas skupionych. Zawsze mzżna zastąpić je jedną.
Postępowanie to nie jest jednoznaczne. Jeśli w mechanizmie jest więcej niż jeden przegub ulokowany na podstawie, to jest pewna swoboda w wyborze tych członów, do których przyczepiamy przeciwwagi. Ponadto przyczepiając każdą przeciwwagę możemy dowolnie wybrać bądź jej masę, bądź też jej odległość od osi pewnego przegubu. Dlatego rcżliwe jest spełnienie pewnego wymagania dodatkowego, na przykład zażądanie minimum sumy mas przeciwwag przy niektórych warunkach typu rzerówności dotyczących odległości.
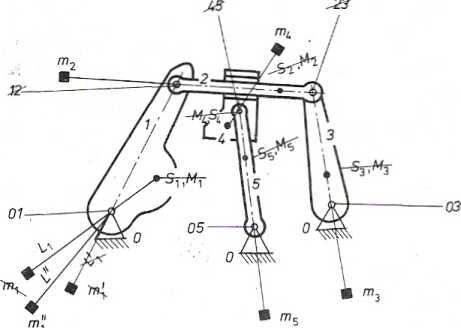
Rys. 4.46
PRZYKŁAD 4.25. Przykład ten jest ilustracją tego postępowania.
Sa rysunku 4.46 pokazano mechanizm płaski sześcioczłonowy o ruchliwości 1. Należy wyrównoważyć go statycznie. Środki mas członów ruchomych oznaczono S-\, ..., S 5, a odpowiednie masy członów M-\, A?2/
...» M5. Osie oznaczono 01, 12, ..., 05.
Krok pierwszy. Spodek masy S4 nie leży na wspólnej zsi członów 4, 5, więc do członu 4 dodajemy skupioną masę rriĄ na linii -r4(45), tak aby suma mas M4 + m4 znalazła się w punkcie 45. W punkcie 54 nie ma już masy. Środek masy Si nie leży ani w punkcie 01 ani 12, żarem do członu 1 dodajemy skupioną masę m-\ na linii S-\(01), tak aby = zzaa mas M-j + mznalazła się w punkcie 01. W punkcie S-| nie ma już rasy. Jest to już koniec pierwszego kroku. Ostatecznie dodaliśmy do zzłonu 4 przeciwwagę m4, a do członu 1 przeciwwagę rrr\ . Poza tym układ ras jest następujący:
Wyszukiwarka
Podobne podstrony:
skanuj0021 4.6. WYWAŻANIE MASZYN I MECHANIZMÓW 177 1, ..., 6) i zakreskowano półpłaszczyzny, w który
skanuj0023 4.6. WYWAŻANIE MASZYN I MECHANIZMÓW 179 ci dają się sprowadzić do siły wypadkowej leżącej
skanuj0031 4.6. WYWAŻANIE MASZYN I MECHANIZMÓW 187 Łącznie więc w punkcie B jest skupiona masa M = M
skanuj0033 4.6. WYWAŻANIE MASZYN I MECHANIZMÓW 189 Rys. 4.49 Po drugie, jak parę razy podkreślaliśmy
skanuj0013 (41) 4.6. WYWAŻANIE MASZYN I MECHANIZMÓW 169 m£ = " mr$ (4.113) oz
skanuj0025 (20) 4 -1. WYWAŻANIE MASZYN I MECHANIZMÓW 181 dx . dzx . I m . ■ = o. E m . *
skanuj0011 (55) 4.6., WYWAŻANIE MASZYN I MECHANIZMÓW 167 4.6.;1. Wyważanie mas w ruchu obrotowym wok
20664 skanuj0015 (35) 4.6. WYWAŻANIE MASZYN I MECHANIZMÓW 171 m^v 1 cos + OTjj2?2 cos a2 = 0, m-
58679 skanuj0029 (14) 4.6. WYWAŻANIE MASZYN I MECHANIZMÓW 185 2. Schemat rys. 4.46
75432 skanuj0017 (34) 4.6 . WYWAŻANIE MASZYN I MECHANIZMÓW 173 pewne jego człony. Układ ten można pr
więcej podobnych podstron