skanuj0013 (41)
4.6. WYWAŻANIE MASZYN I MECHANIZMÓW 169
m£ = " mr$ (4.113)
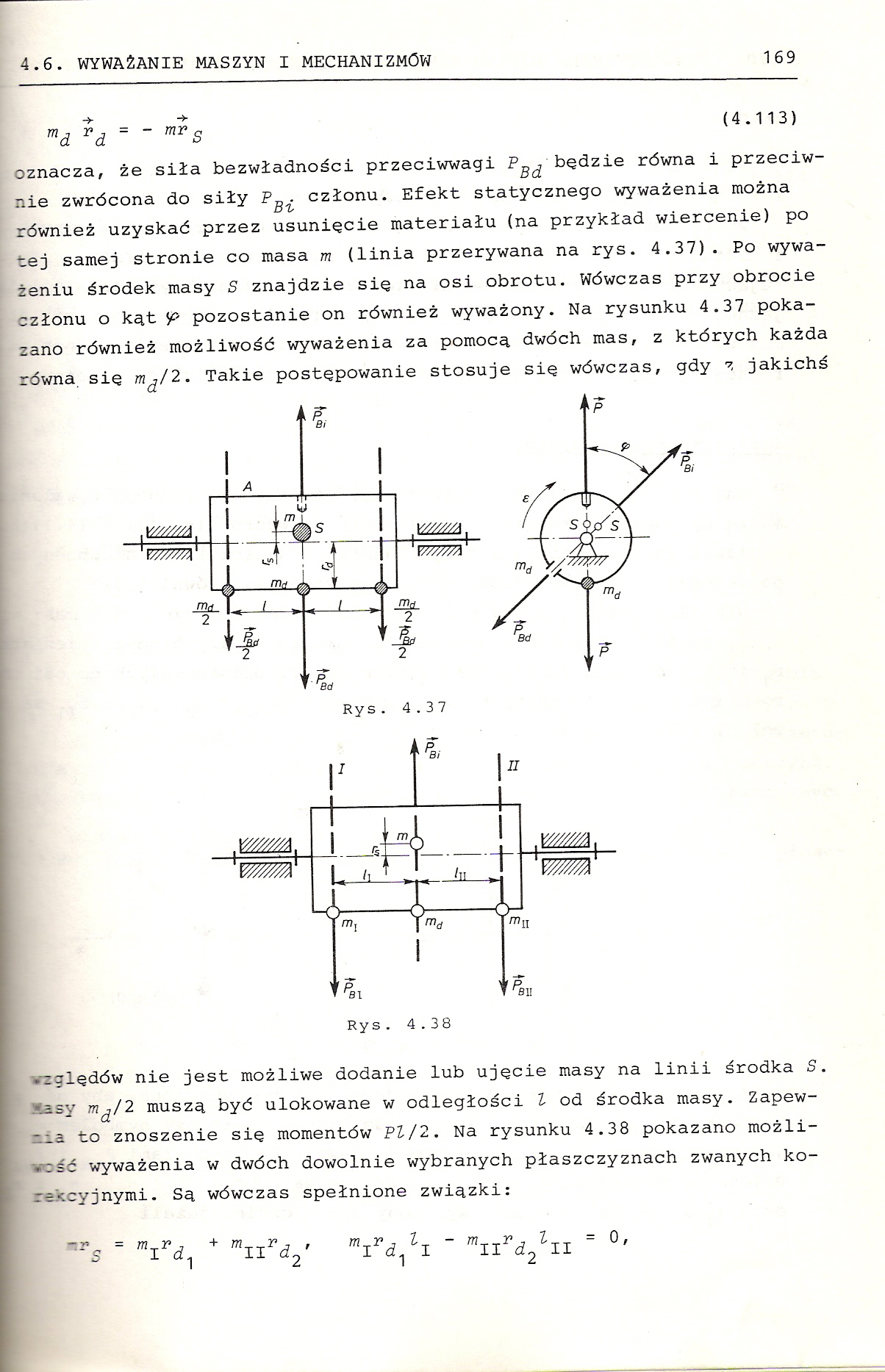
oznacza, że siła bezwładności przeciwwagi PBd będzie równa i przeciwnie zwrócona do siły P„ . członu. Efekt statycznego wyważenia można
D ts
również uzyskać przez usunięcie materiału (na przykład wiercenie) po tej samej stronie co masa m (linia przerywana na rys. 4.37). Po wyważeniu środek masy S znajdzie się na osi obrotu. Wówczas przy obrocie członu o kąt p pozostanie on również wyważony. Na rysunku 4.37 pokazano również możliwość wyważenia za pomocą dwóch mas, z których każda równa się m^/2. Takie postępowanie stosuje się wówczas, gdy z jakichś

względów nie jest możliwe dodanie lub ujęcie masy na linii środka S. ■asy m^/2 muszą być ulokowane w odległości l od środka masy. Zapew-r_ia to znoszenie się momentów Pl/2. Na rysunku 4.38 pokazano możliwość wyważenia w dwóch dowolnie wybranych płaszczyznach zwanych ko-rekcyjnymi. Są wówczas spełnione związki:
mTs = "ird1 * "IIrd2’ mIrd*l - mZlrd2lll
Wyszukiwarka
Podobne podstrony:
skanuj0025 (20) 4 -1. WYWAŻANIE MASZYN I MECHANIZMÓW 181 dx . dzx . I m . ■ = o. E m . *
skanuj0011 (55) 4.6., WYWAŻANIE MASZYN I MECHANIZMÓW 167 4.6.;1. Wyważanie mas w ruchu obrotowym wok
20664 skanuj0015 (35) 4.6. WYWAŻANIE MASZYN I MECHANIZMÓW 171 m^v 1 cos + OTjj2?2 cos a2 = 0, m-
58679 skanuj0029 (14) 4.6. WYWAŻANIE MASZYN I MECHANIZMÓW 185 2. Schemat rys. 4.46
75432 skanuj0017 (34) 4.6 . WYWAŻANIE MASZYN I MECHANIZMÓW 173 pewne jego człony. Układ ten można pr
53753 skanuj0019 (30) WYWAŻANIE MASZYN I MECHANIZMÓW 171 Ix a-, (rys. 4.42). Kołnierz po prawej stro
skanuj0027 WYWAŻANIE MASZYN I MECHANIZMÓW 183 Jeśli człon l wchodzi w parą obrotową z podstawą, to d
skanuj0021 4.6. WYWAŻANIE MASZYN I MECHANIZMÓW 177 1, ..., 6) i zakreskowano półpłaszczyzny, w który
skanuj0023 4.6. WYWAŻANIE MASZYN I MECHANIZMÓW 179 ci dają się sprowadzić do siły wypadkowej leżącej
skanuj0031 4.6. WYWAŻANIE MASZYN I MECHANIZMÓW 187 Łącznie więc w punkcie B jest skupiona masa M = M
więcej podobnych podstron