skanuj0031
4.6. WYWAŻANIE MASZYN I MECHANIZMÓW 187

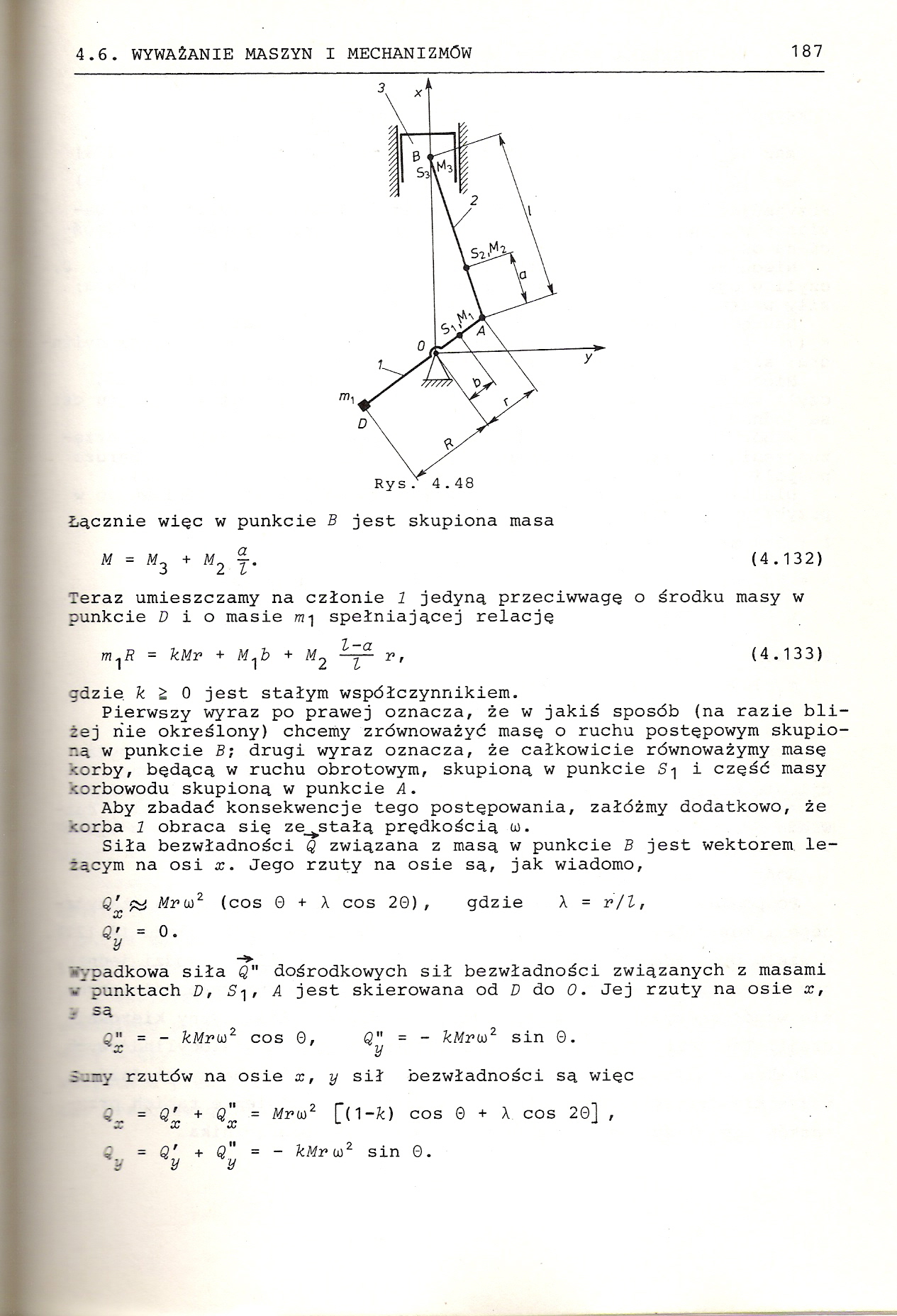
Łącznie więc w punkcie B jest skupiona masa
M = M3 + M2 j. (4.132)
Teraz umieszczamy na członie 1 jedyną przeciwwagę o środku masy w punkcie D i o masie nr\ spełniającej relację
m^R = kMr + M^b + r, (4.133)
gdzie k > 0 jest stałym współczynnikiem.
Pierwszy wyraz po prawej oznacza, że w jakiś sposób (na razie bli żej nie określony) chcemy zrównoważyć masę o ruchu postępowym skupio ną w punkcie B; drugi wyraz oznacza, że całkowicie równoważymy masę korby, będącą w ruchu obrotowym, skupioną w punkcie S-j i część masy korbowodu skupioną w punkcie A.
Aby zbadać konsekwencje tego postępowania, załóżmy dodatkowo, że korba 1 obraca się ze_^stałą prędkością w.
Siła bezwładności Q związana z masą w punkcie B jest wektorem leżącym na osi x. Jego rzuty na osie są, jak wiadomo.
Q' & Mrto2 (cos 0 + X cos 20) , gdzie X = r/l,
CC
Q' = 0.
y
Wypadkowa siła Q" dośrodkowych sił bezwładności związanych z masami w punktach D, S-j, A jest skierowana od D do 0. Jej rzuty na osie x, | są
- kMrm2 sin 0. bezwładności są więc cos 0 + X cos 20] ,
0.
Q" = - kMrw2 cos 0, Q" = Hx
Sumy rzutów na osie x, y sił = Q' + Ql = Mru2 [(1-Zc)
■b «V , W
ś = Q' + q" - - kMr u)2 sin
Wyszukiwarka
Podobne podstrony:
skanuj0027 WYWAŻANIE MASZYN I MECHANIZMÓW 183 Jeśli człon l wchodzi w parą obrotową z podstawą, to d
skanuj0021 4.6. WYWAŻANIE MASZYN I MECHANIZMÓW 177 1, ..., 6) i zakreskowano półpłaszczyzny, w który
skanuj0023 4.6. WYWAŻANIE MASZYN I MECHANIZMÓW 179 ci dają się sprowadzić do siły wypadkowej leżącej
skanuj0033 4.6. WYWAŻANIE MASZYN I MECHANIZMÓW 189 Rys. 4.49 Po drugie, jak parę razy podkreślaliśmy
skanuj0013 (41) 4.6. WYWAŻANIE MASZYN I MECHANIZMÓW 169 m£ = " mr$ (4.113) oz
skanuj0025 (20) 4 -1. WYWAŻANIE MASZYN I MECHANIZMÓW 181 dx . dzx . I m . ■ = o. E m . *
skanuj0011 (55) 4.6., WYWAŻANIE MASZYN I MECHANIZMÓW 167 4.6.;1. Wyważanie mas w ruchu obrotowym wok
20664 skanuj0015 (35) 4.6. WYWAŻANIE MASZYN I MECHANIZMÓW 171 m^v 1 cos + OTjj2?2 cos a2 = 0, m-
58679 skanuj0029 (14) 4.6. WYWAŻANIE MASZYN I MECHANIZMÓW 185 2. Schemat rys. 4.46
75432 skanuj0017 (34) 4.6 . WYWAŻANIE MASZYN I MECHANIZMÓW 173 pewne jego człony. Układ ten można pr
więcej podobnych podstron