skanuj0021

4.6. WYWAŻANIE MASZYN I MECHANIZMÓW 177
1, ..., 6) i zakreskowano półpłaszczyzny, w których warunki (4.119) nie- są spełnione. Po odrzuceniu tych półpłaszczyzn zostaje tzw. simpleks, będący obszarem rozwiązań dopuszczalnych.
Dla przykładu podamy, jak się wykreśla linię m? = 0. Dla m-j = 0
m _ _ 10/04 _ , 9
m6 “ 0,033 304,2,
dla mg W1 =
= 0
10,04
1,033
9,72.
Obrazem rodziny równań 2(mi, m§) = const są linie proste tworzące z osią mę (rys. 4.45) kąt 45 . Prowadząc taką linię przez naroże simpleksu, najbliższe do początku układu, znajduje się, że rozwiązanie optymalne jest na przecięciu linii - 0 i linii m^ = 0; z drugiego równania układu (4.119) jest m-j = 9,719. Po wstawieniu tych wartości do pozostałych równań (4.119) otrzymuje się nr\ = 9,719, m2 - 0, ^3 =
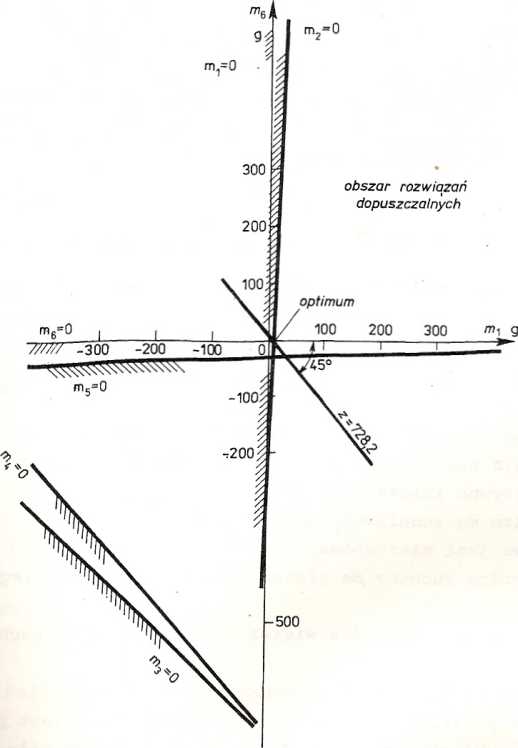
Rys. 4.45
Wyszukiwarka
Podobne podstrony:
skanuj0027 WYWAŻANIE MASZYN I MECHANIZMÓW 183 Jeśli człon l wchodzi w parą obrotową z podstawą, to d
skanuj0023 4.6. WYWAŻANIE MASZYN I MECHANIZMÓW 179 ci dają się sprowadzić do siły wypadkowej leżącej
skanuj0031 4.6. WYWAŻANIE MASZYN I MECHANIZMÓW 187 Łącznie więc w punkcie B jest skupiona masa M = M
skanuj0033 4.6. WYWAŻANIE MASZYN I MECHANIZMÓW 189 Rys. 4.49 Po drugie, jak parę razy podkreślaliśmy
skanuj0013 (41) 4.6. WYWAŻANIE MASZYN I MECHANIZMÓW 169 m£ = " mr$ (4.113) oz
skanuj0025 (20) 4 -1. WYWAŻANIE MASZYN I MECHANIZMÓW 181 dx . dzx . I m . ■ = o. E m . *
skanuj0011 (55) 4.6., WYWAŻANIE MASZYN I MECHANIZMÓW 167 4.6.;1. Wyważanie mas w ruchu obrotowym wok
20664 skanuj0015 (35) 4.6. WYWAŻANIE MASZYN I MECHANIZMÓW 171 m^v 1 cos + OTjj2?2 cos a2 = 0, m-
58679 skanuj0029 (14) 4.6. WYWAŻANIE MASZYN I MECHANIZMÓW 185 2. Schemat rys. 4.46
75432 skanuj0017 (34) 4.6 . WYWAŻANIE MASZYN I MECHANIZMÓW 173 pewne jego człony. Układ ten można pr
więcej podobnych podstron