20664 skanuj0015 (35)
4.6. WYWAŻANIE MASZYN I MECHANIZMÓW 171
|
m^v |
1 |
cos + OTjj2?2 cos |
a2 |
= 0, | ||
|
m-r |
1 sin a |
1 |
+ Wjj2»2 sin a2 + |
m |
0 0 |
= 0, |
|
Ir-\ |
cos a.| |
+ |
zlImIIr2 cos a2 |
+ |
^ xz |
= 0, |
|
I*! |
sin a. |
+ |
zllmllx>2 sin a2 |
+ |
Jy* |
= 0. |
Jeżeli oznaczymy Aj = mi Ajj = otrzymamy układ czterech
równań o czterech niewiadomych: Aj, Ajj, i a2 (przy dowolnych zj i z-j-j) • Przyjmując r^ i rao^na określić masy njj i Wjj.
Przy konstruowaniu obliczamy wielkości Aj, Ajj, , a^, a w procesie technologicznym wyznaczamy je na drodze doświadczalnej. Doświadczalne określenie niewyważenia i jego eliminacje przeprowadza s±e zwykle na maszynach zwanych wyważarkami. Ponieważ płaszczyzny korekcyjne mogą być wybrane dowolnie, zazwyczaj ustala* sie je już z góry dla danej konstrukcji wirnika lub wału wykorbionego. Miarą niewyważenia jest zwykle iloraz
u = (4.115)
gdzie M jest masą członu wyważanego.
Jeśli przyjąć jednostki: M w kg, m w g i r w mm, to u beózie miało wymiar w ]im. Niewyważenie mierzy sie wiec przesunięciem masy członu przypadającym na rozważaną płaszczyznę korekcji. Całkowite przesu-
• + + + . niecre jest sumą geometryczną u = + u2 Przesunieć obu płaszczyzn.
Na tej zasadzie działa większość współczesnych wyważarek dynamicznych.
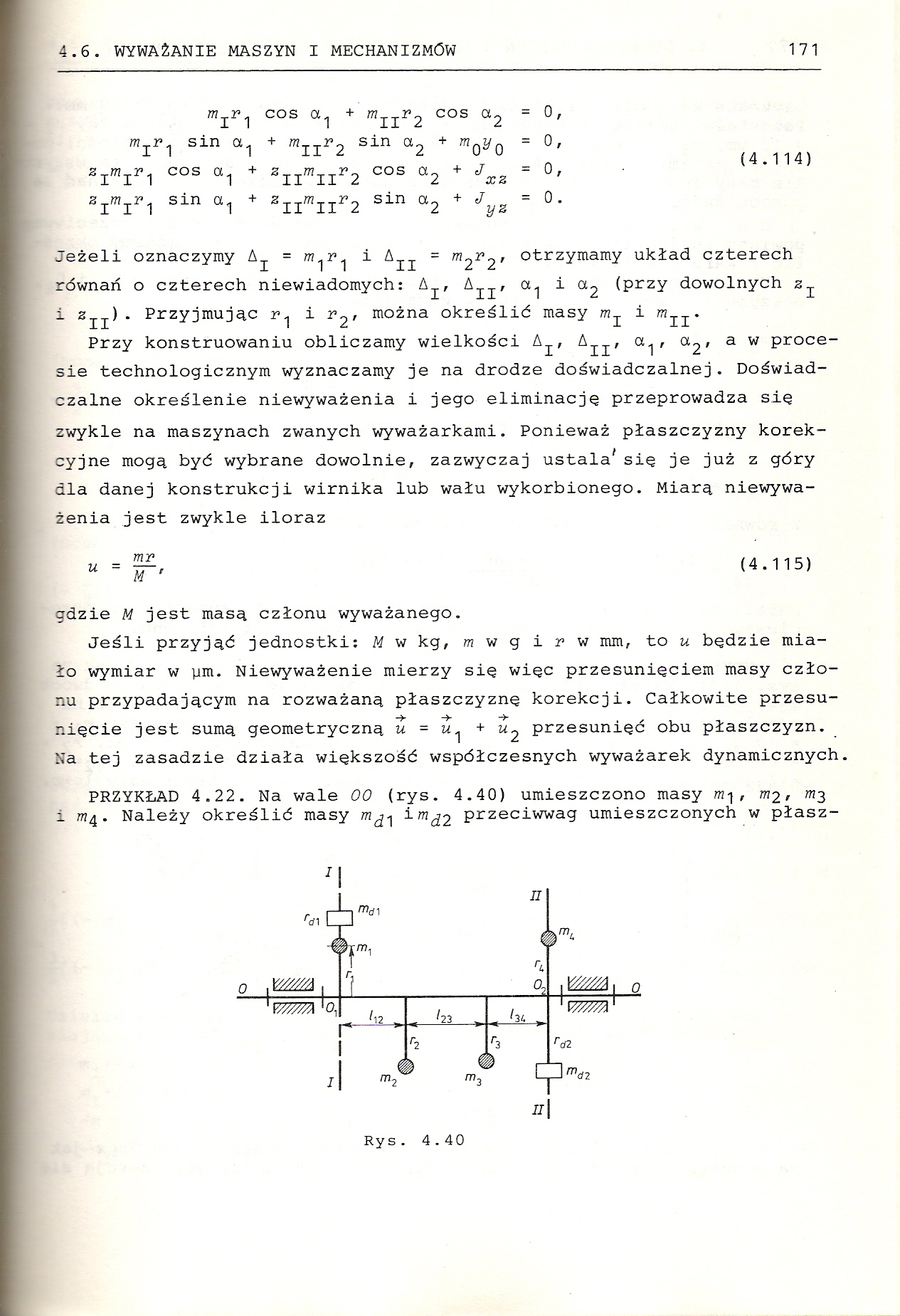
PRZYKŁAD 4.22. Na wale 00 (rys. 4.40) umieszczono masy m-j, rri2, m3 i rt4. Należy określić masy m^ ^md2 Przeciwwa9 umieszczonych w płasz-
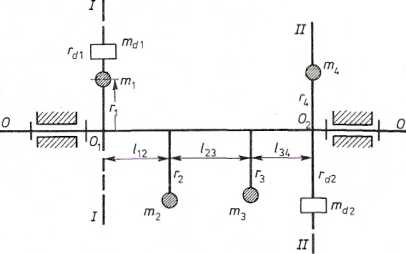
Rys. 4.40
Wyszukiwarka
Podobne podstrony:
53753 skanuj0019 (30) WYWAŻANIE MASZYN I MECHANIZMÓW 171 Ix a-, (rys. 4.42). Kołnierz po prawej stro
skanuj0013 (41) 4.6. WYWAŻANIE MASZYN I MECHANIZMÓW 169 m£ = " mr$ (4.113) oz
skanuj0025 (20) 4 -1. WYWAŻANIE MASZYN I MECHANIZMÓW 181 dx . dzx . I m . ■ = o. E m . *
skanuj0011 (55) 4.6., WYWAŻANIE MASZYN I MECHANIZMÓW 167 4.6.;1. Wyważanie mas w ruchu obrotowym wok
58679 skanuj0029 (14) 4.6. WYWAŻANIE MASZYN I MECHANIZMÓW 185 2. Schemat rys. 4.46
75432 skanuj0017 (34) 4.6 . WYWAŻANIE MASZYN I MECHANIZMÓW 173 pewne jego człony. Układ ten można pr
skanuj0027 WYWAŻANIE MASZYN I MECHANIZMÓW 183 Jeśli człon l wchodzi w parą obrotową z podstawą, to d
skanuj0021 4.6. WYWAŻANIE MASZYN I MECHANIZMÓW 177 1, ..., 6) i zakreskowano półpłaszczyzny, w który
skanuj0023 4.6. WYWAŻANIE MASZYN I MECHANIZMÓW 179 ci dają się sprowadzić do siły wypadkowej leżącej
skanuj0031 4.6. WYWAŻANIE MASZYN I MECHANIZMÓW 187 Łącznie więc w punkcie B jest skupiona masa M = M
więcej podobnych podstron